
Application of Kirchhoff Migration from Two-Dimensional Fresnel Dataset by Converting Unavailable Data into a Constant


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Two-Dimensional Simulation Configuration and Kirchhoff Migration
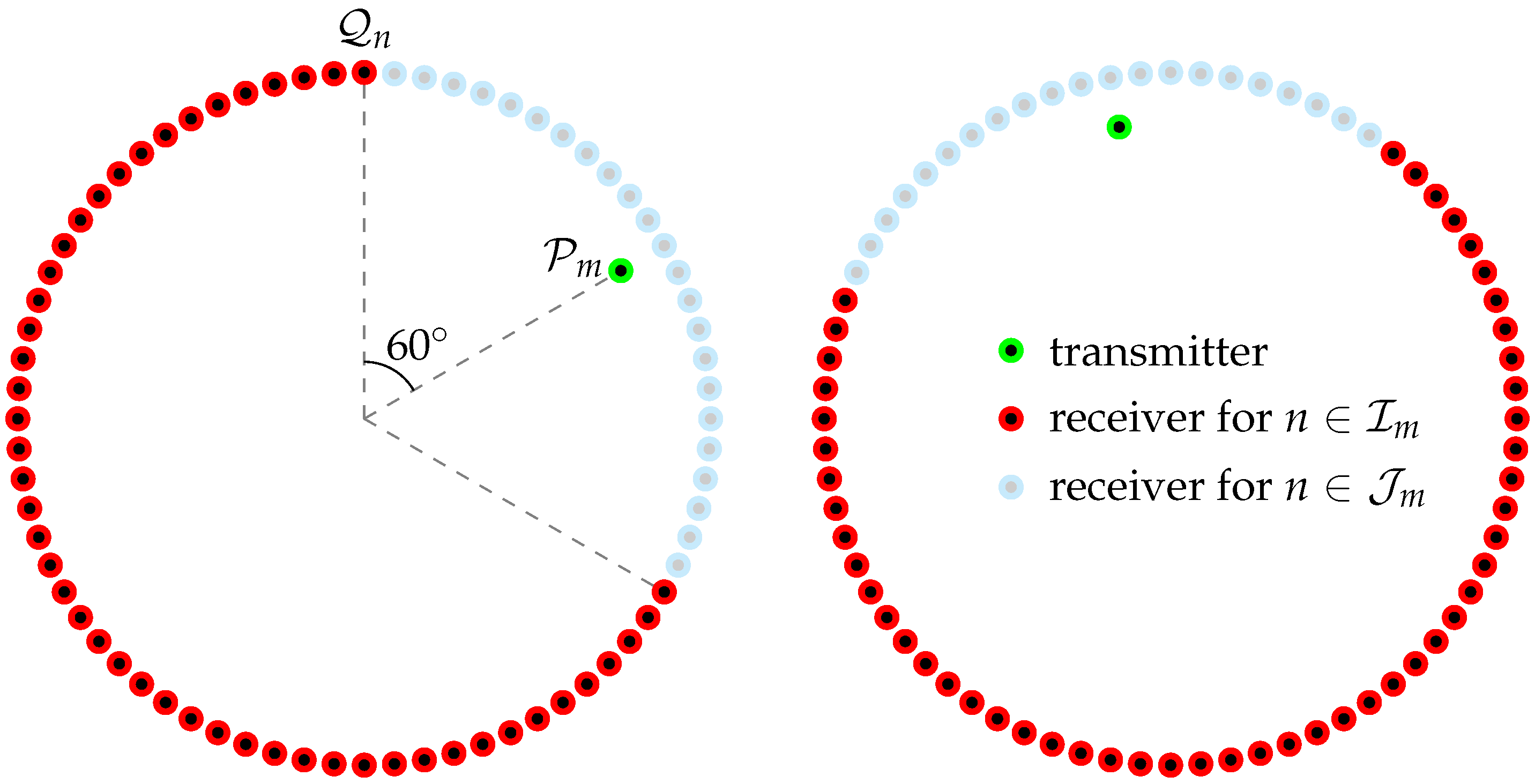
2.1. Problem Configuration and Representation Formula for the Scattered Field
2.2. Imaging Function of the Kirchhoff Migration Method
3. Theoretical Result: Mathematical Structure of the Imaging Function
4. Properties of the Imaging Function and Unique Determination of Objects
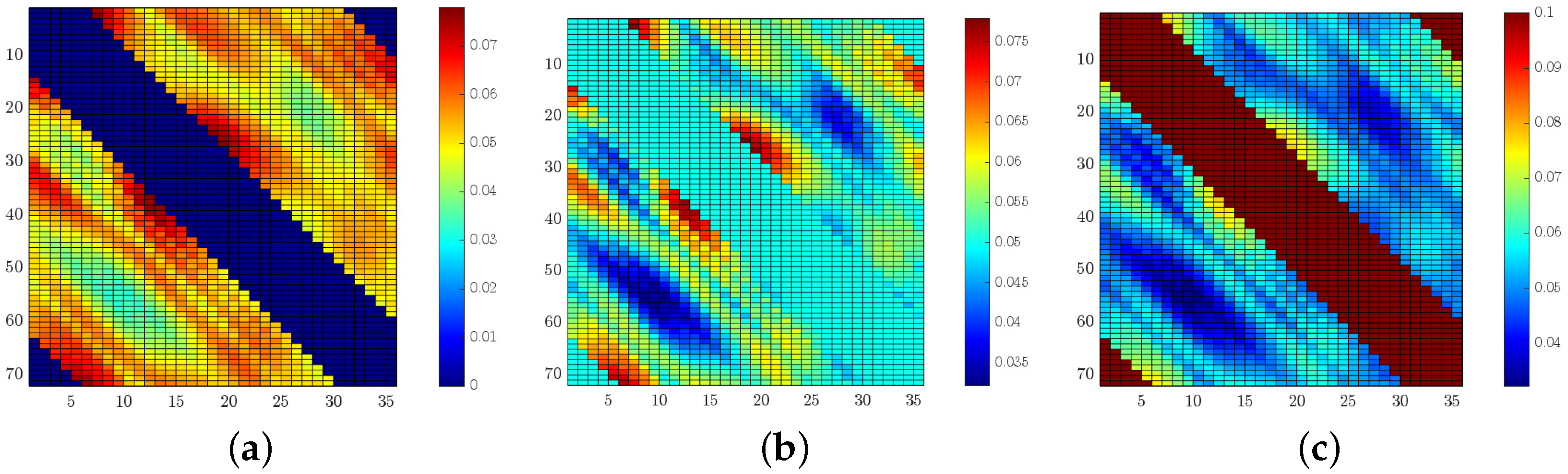
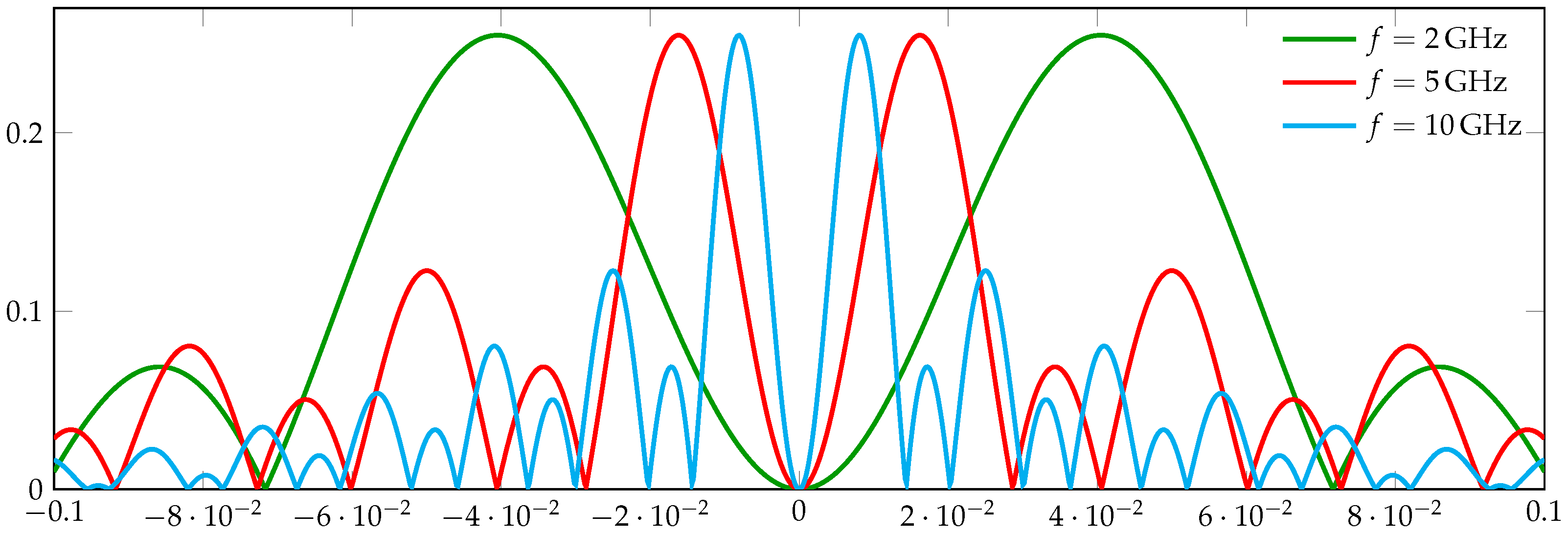
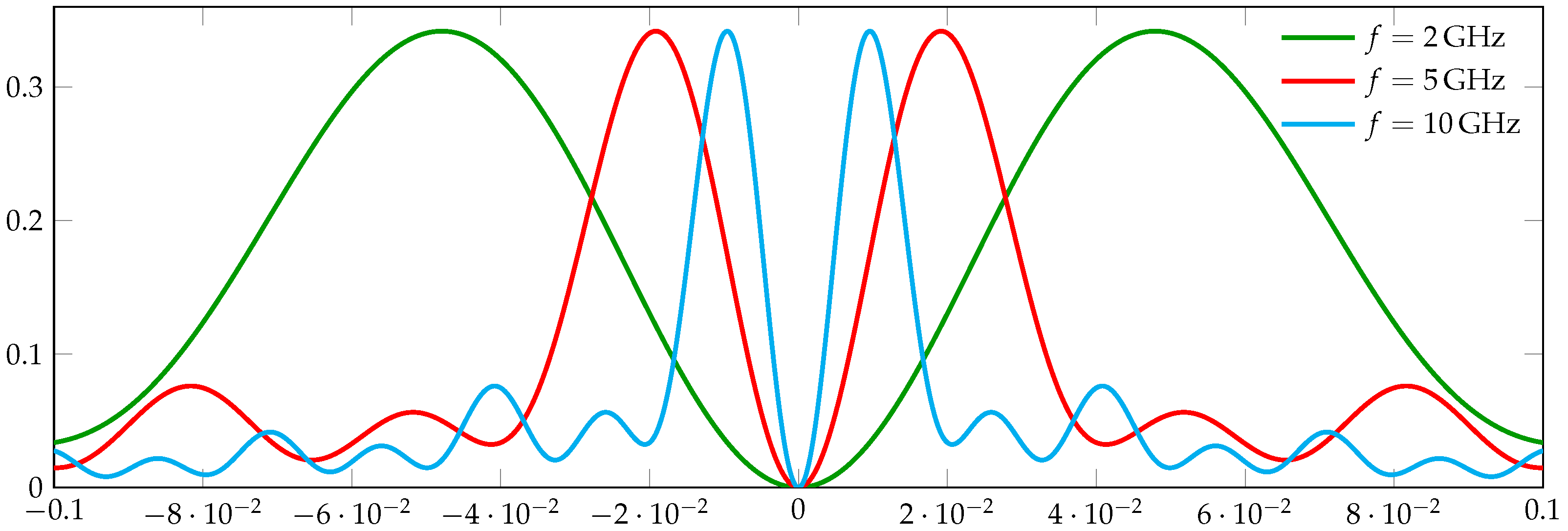
5. Simulation Results with Fresnel Dataset
6. Concluding Remark
Funding
Data Availability Statement
Conflicts of Interest
References
- Mojabi, P.; LoVetri, J. Microwave biomedical imaging using the multiplicative regularized Gauss-Newton inversion. IEEE Antennas Propag. Lett. 2009, 8, 645–648. [Google Scholar] [CrossRef]
- Foudazix, A.; Mirala, A.; Ghasr, M.T.; Donnell, K.M. Active microwave thermography for nondestructive evaluation of surface cracks in metal structures. IEEE Trans. Instrum. Meas. 2019, 68, 576–585. [Google Scholar] [CrossRef]
- Mallorqui, J.J.; Joachimowicz, N.; Broquetas, A.; Bolomey, J.C. Quantitative images of large biological bodies in microwave tomography by using numerical and real data. Electron. Lett. 1996, 32, 2138–2140. [Google Scholar] [CrossRef]
- Chandra, R.; Johansson, A.J.; Gustafsson, M.; Tufvesson, F. A microwave imaging-based technique to localize an in-body RF source for biomedical applications. IEEE Trans. Biomed. Eng. 2015, 62, 1231–1241. [Google Scholar] [CrossRef]
- Delbary, F.; Erhard, K.; Kress, R.; Potthast, R.; Schulz, J. Inverse electromagnetic scattering in a two-layered medium with an application to mine detection. Inverse Probl. 2008, 24, 015002. [Google Scholar] [CrossRef]
- Dorn, O.; Lesselier, D. Level set methods for inverse scattering. Inverse Probl. 2006, 22, R67–R131. [Google Scholar] [CrossRef]
- Ikeda, K.; Yoshimi, M.; Miki, C. Electrical potential drop method for evaluating crack depth. Int. J. Fract. 1991, 47, 25–38. [Google Scholar] [CrossRef]
- Sokołowski, J.; Zochowski, A. On the topological derivative in shape optimization. SIAM J. Control Optim. 1999, 37, 1251–1272. [Google Scholar] [CrossRef]
- Kress, R. Inverse scattering from an open arc. Math. Meth. Appl. Sci. 1995, 18, 267–293. [Google Scholar] [CrossRef]
- Kwon, O.; Seo, J.K.; Yoon, J.R. A real-time algorithm for the location search of discontinuous conductivities with one measurement. Comm. Pur. Appl. Math. 2002, 55, 1–29. [Google Scholar] [CrossRef]
- Park, W.K.; Lesselier, D. Reconstruction of thin electromagnetic inclusions by a level set method. Inverse Probl. 2009, 25, 085010. [Google Scholar] [CrossRef]
- Kim, Y.J.; Jofre, L.; Flaviis, F.D.; Feng, M.Q. Microwave reflection tomographic array for damage detection of civil structures. IEEE Trans. Antennas Propag. 2003, 51, 3022–3032. [Google Scholar]
- Jofre, L.; Broquetas, A.; Romeu, J.; Blanch, S.; Toda, A.P.; Fabregas, X.; Cardama, A. UWB tomographic radar imaging of penetrable and impenetrable objects. Proc. IEEE 2009, 97, 451–464. [Google Scholar] [CrossRef]
- Park, W.K. Theoretical study on non-improvement of the multi-frequency direct sampling method in inverse scattering problem. Mathematics 2022, 10, 1674. [Google Scholar] [CrossRef]
- Son, S.H.; Lee, K.J.; Park, W.K. Application and analysis of direct sampling method in real-world microwave imaging. Appl. Math. Lett. 2019, 96, 47–53. [Google Scholar] [CrossRef]
- Boukari, Y.; Haddar, H. The factorization method applied to cracks with impedance boundary conditions. Inverse Probl. Imaging 2013, 7, 1123–1138. [Google Scholar] [CrossRef]
- Coşğun, S.; Bilgin, E.; Çayören, M. Microwave imaging of breast cancer with factorization method: SPIONs as contrast agent. Med. Phys. 2020, 47, 3113–3122. [Google Scholar] [CrossRef]
- Scholz, B. Towards virtual electrical breast biopsy: Space frequency MUSIC for trans-admittance data. IEEE Trans. Med. Imaging 2002, 21, 588–595. [Google Scholar] [CrossRef]
- Park, W.K. Application of MUSIC algorithm in real-world microwave imaging of unknown anomalies from scattering matrix. Mech. Syst. Signal Proc. 2021, 153, 107501. [Google Scholar] [CrossRef]
- Alqadah, H.F. A compressive multi-frequency linear sampling method for underwater acoustic imaging. IEEE Trans. Image Process. 2016, 25, 2444–2455. [Google Scholar] [CrossRef]
- Audibert, L.; Haddar, H. The generalized linear sampling method for limited aperture measurements. SIAM J. Imaging Sci. 2017, 10, 845–870. [Google Scholar] [CrossRef]
- Park, W.K. Fast localization of small inhomogeneities from far-field pattern data in limited-aperture inverse scattering problem. Mathematics 2021, 9, 2087. [Google Scholar] [CrossRef]
- Park, W.K. Real-time detection of small anomaly from limited-aperture measurements in real-world microwave imaging. Mech. Syst. Signal Proc. 2022, 171, 108937. [Google Scholar] [CrossRef]
- Park, W.K. Performance analysis of multi-frequency topological derivative for reconstructing perfectly conducting cracks. J. Comput. Phys. 2017, 335, 865–884. [Google Scholar] [CrossRef]
- Muñoz, S.; Rapún, M.L. Towards flaw detection in welding joints via multi-frequency topological derivative methods. Comput. Math. Appl. 2024, 161, 121–136. [Google Scholar] [CrossRef]
- Aprea, C.M.; Hildebrand, S.; Fehler, M.; Steck, L.; Baldridge, W.S.; Roberts, P.; Thurber, C.H.; Lutter, W.J. Three-dimensional Kirchhoff migration: Imaging of the Jemez volcanic field using teleseismic data. J. Geophys. Res. Solid Earth 2002, 107, ESE 11-1–ESE 11-15. [Google Scholar] [CrossRef]
- Ahn, C.Y.; Ha, T.; Park, W.K. Kirchhoff migration for identifying unknown targets surrounded by random scatterers. Appl. Sci. 2019, 9, 4446. [Google Scholar] [CrossRef]
- Bardsley, P.; Vasquez, F.G. Kirchhoff migration without phases. Inverse Probl. 2016, 32, 105006. [Google Scholar] [CrossRef]
- Dorney, T.D.; Johnson, J.L.; Rudd, J.V.; Baraniuk, R.G.; Symes, W.W.; Mittleman, D.M. Terahertz reflection imaging using Kirchhoff migration. Opt. Lett. 2001, 26, 1513–1515. [Google Scholar] [CrossRef]
- Park, W.K. Real-time identification of small anomalies from scattering matrix without background information. Int. J. Appl. Electromagn. Mech. 2024, 74, 289–297. [Google Scholar] [CrossRef]
- Son, S.H.; Lee, K.J.; Park, W.K. Real-time tracking of moving objects from scattering matrix in real-world microwave imaging. AIMS Math. 2024, 9, 13570–13588. [Google Scholar] [CrossRef]
- Zhuge, X.; Yarovoy, A.G.; Savelyev, T.; Ligthart, L. Modified Kirchhoff migration for UWB MIMO array-based radar imaging. IEEE. Trans. Geosci. Remote Sens. 2010, 48, 2692–2703. [Google Scholar] [CrossRef]
- Kim, J.Y.; Lee, K.J.; Kim, B.R.; Jeon, S.I.; Son, S.H. Numerical and experimental assessments of focused microwave thermotherapy system at 925MHz. ETRI J. 2019, 41, 850–862. [Google Scholar] [CrossRef]
- Belkebir, K.; Saillard, M. Special section: Testing inversion algorithms against experimental data. Inverse Probl. 2001, 17, 1565–1571. [Google Scholar] [CrossRef]
- Ammari, H.; Kang, H. Reconstruction of Small Inhomogeneities from Boundary Measurements; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 2004; Volume 1846. [Google Scholar]
- Bleistein, N.; Cohen, J.; Stockwell, J.S., Jr. Mathematics of Multidimensional Seismic Imaging, Migration, and Inversion; Interdisciplinary Applied Mathematics; Springer: New York, NY, USA, 2001; Volume 13. [Google Scholar]
- Ammari, H.; Garnier, J.; Kang, H.; Park, W.K.; Sølna, K. Imaging schemes for perfectly conducting cracks. SIAM J. Appl. Math. 2011, 71, 68–91. [Google Scholar] [CrossRef]
- Eom, J.; Park, W.K. Real-time detection of small objects in transverse electric polarization: Evaluations on synthetic and experimental datasets. AIMS Math. 2024, 9, 22665–22679. [Google Scholar] [CrossRef]
- Colton, D.; Kress, R. Inverse Acoustic and Electromagnetic Scattering Problems; Mathematics and Applications Series; Springer: New York, NY, USA, 1998; Volume 93. [Google Scholar]
- Park, W.K. Multi-frequency subspace migration for imaging of perfectly conducting, arc-like cracks in full- and limited-view inverse scattering problems. J. Comput. Phys. 2015, 283, 52–80. [Google Scholar] [CrossRef]
- Geffrin, J.M.; Sabouroux, P.; Eyraud, C. Free space experimental scattering database continuation: Experimental set-up and measurement precision. Inverse Probl. 2005, 21, S117–S130. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, W.-K. Application of Kirchhoff Migration from Two-Dimensional Fresnel Dataset by Converting Unavailable Data into a Constant. Mathematics 2024, 12, 3253. https://doi.org/10.3390/math12203253
Park W-K. Application of Kirchhoff Migration from Two-Dimensional Fresnel Dataset by Converting Unavailable Data into a Constant. Mathematics. 2024; 12(20):3253. https://doi.org/10.3390/math12203253
Chicago/Turabian StylePark, Won-Kwang. 2024. "Application of Kirchhoff Migration from Two-Dimensional Fresnel Dataset by Converting Unavailable Data into a Constant" Mathematics 12, no. 20: 3253. https://doi.org/10.3390/math12203253
APA StylePark, W.-K. (2024). Application of Kirchhoff Migration from Two-Dimensional Fresnel Dataset by Converting Unavailable Data into a Constant. Mathematics, 12(20), 3253. https://doi.org/10.3390/math12203253