
A Martingale Posterior-Based Fault Detection and Estimation Method for Electrical Systems of Industry


Abstract
:1. Introduction
- (1)
- A martingale posterior-based (MP) data generation method is introduced for electrical systems of industry. The Dirichlet process is considered to analyze the complex distribution problem in the generation process.
- (2)
- The data-driven scheme is designed via MP and SKR. It not only ensures the recursive realization of estimation but improves the modeling accuracy by reducing the uncertainty.
- (3)
- FD and FE, using the proposed framework for electrical systems of industry, are accomplished, respectively.
2. Preliminaries and Problem Formulation
2.1. Observer-Based Data-Driven FD
2.2. Bayesian Filter for State Estimation
2.3. Problem Formulation
- To design a data generation method for reducing uncertainty in dynamic system models.
- To construct a data-driven model that is suitable for dynamic systems with a missing data problem.
- To finish the FD and FE tasks for electrical systems of industry.
3. The MP-Based FD and FE Methods
3.1. MP-Based Data Generation
3.2. Identification of Data-Driven Model
3.3. FD and FD for Electrical Systems
| Algorithm 1: FD and FE methods. |
Input: Signals and data size: , , N, and s. Output: Performance variables: and .
|
4. Experiments and Discussion
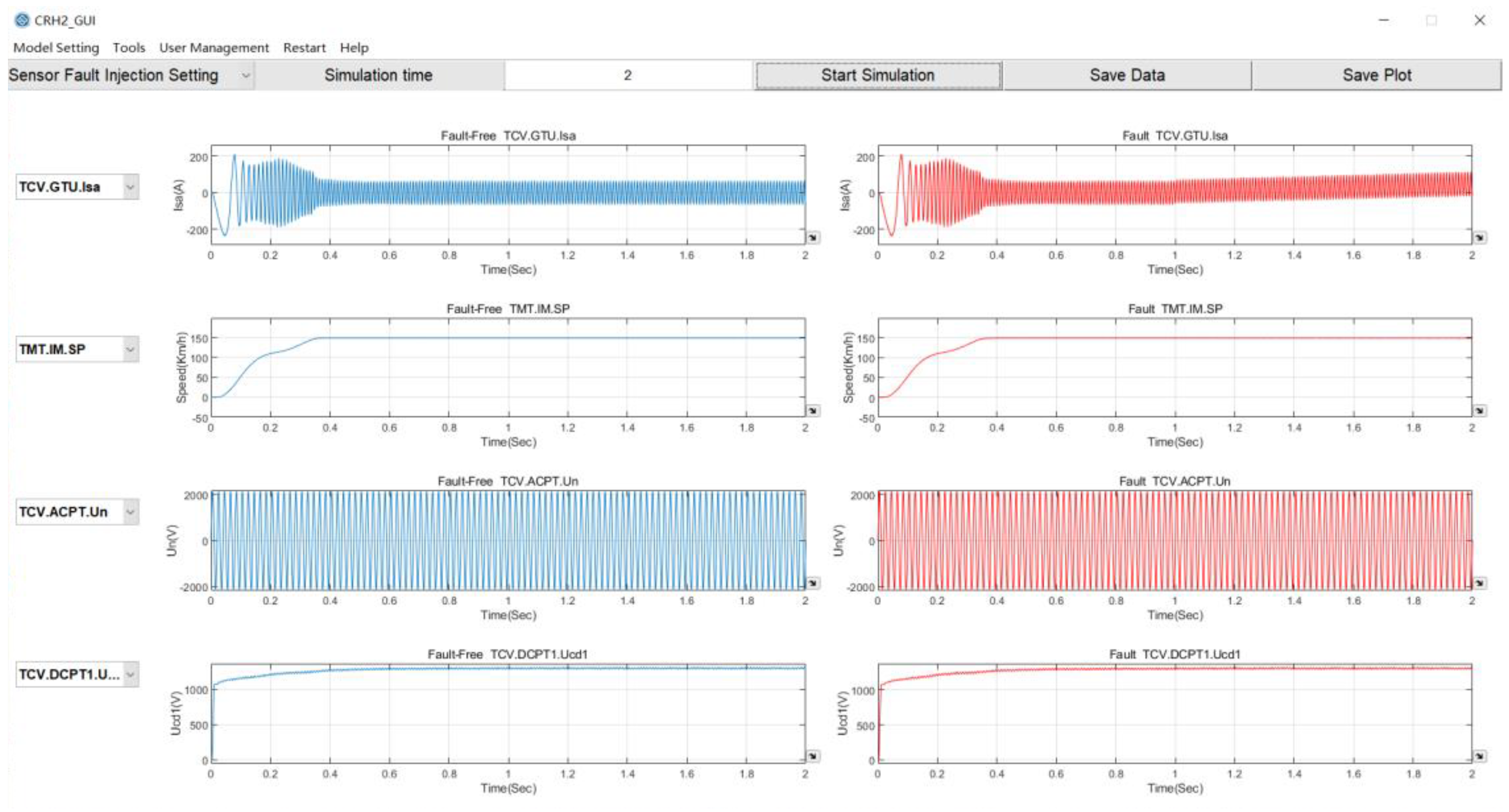
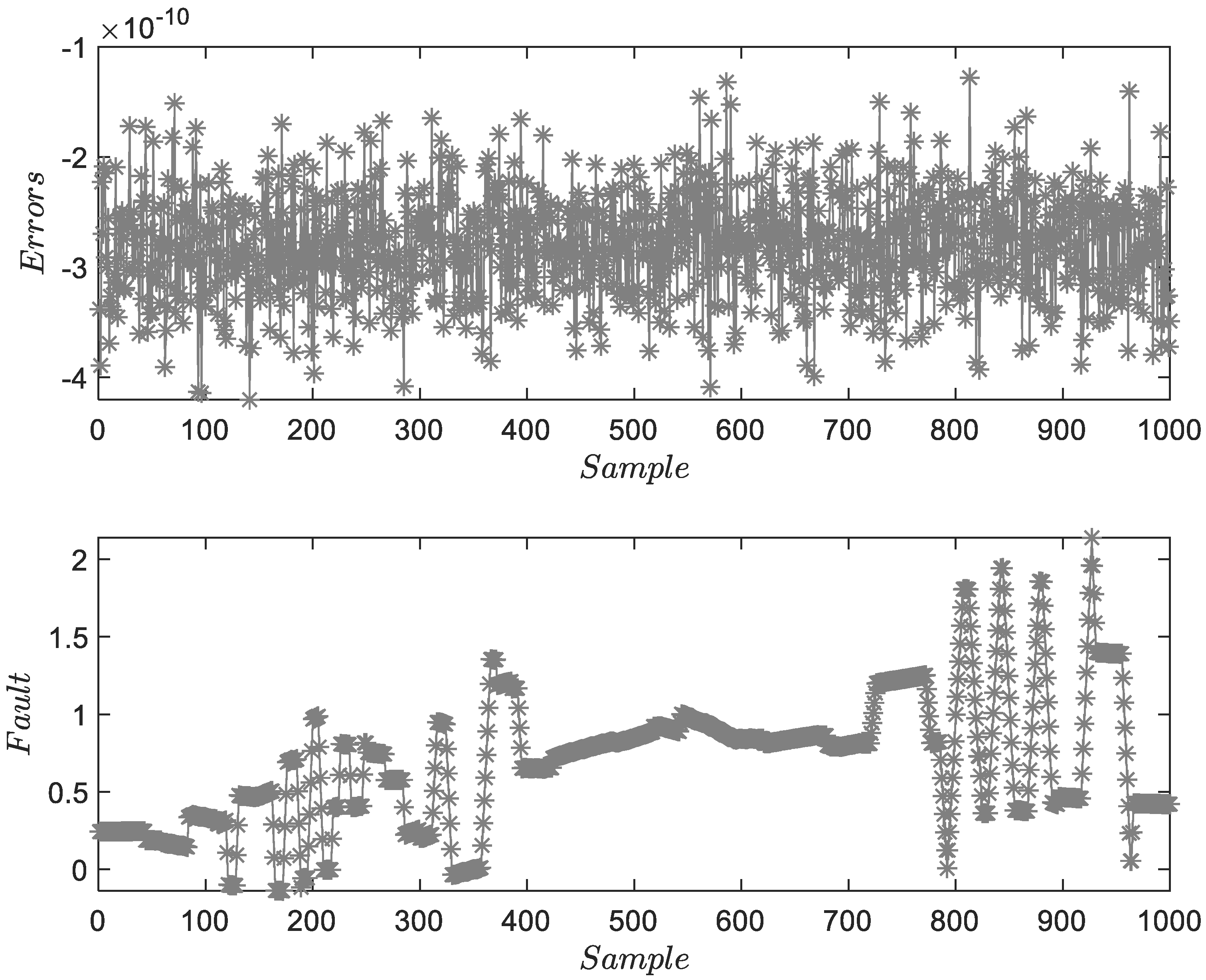
4.1. Experiment on a Traction Drive Control Numerical Platform
- (1)
- Fault 1: is an offset fault, which manifested by a constant between the measurements and real values. It can be caused by errors of sensors or environmental factors. This constant does not change over time. The fault parameter of injection is 5.
- (2)
- Fault 2: is a drift fault. The main manifestation of is that the measurement error varies over time. The environment, structure of sensors, and external disturbances can all lead to drift faults, affecting the long-term stability and accuracy of the sensor. The fault parameter of injection is (120,20).
- (3)
- Fault 3: is a gain fault, which commonly occurs in systems. The wear of mechanical equipment is the main reason for this fault. The fault parameter of injection is 5.
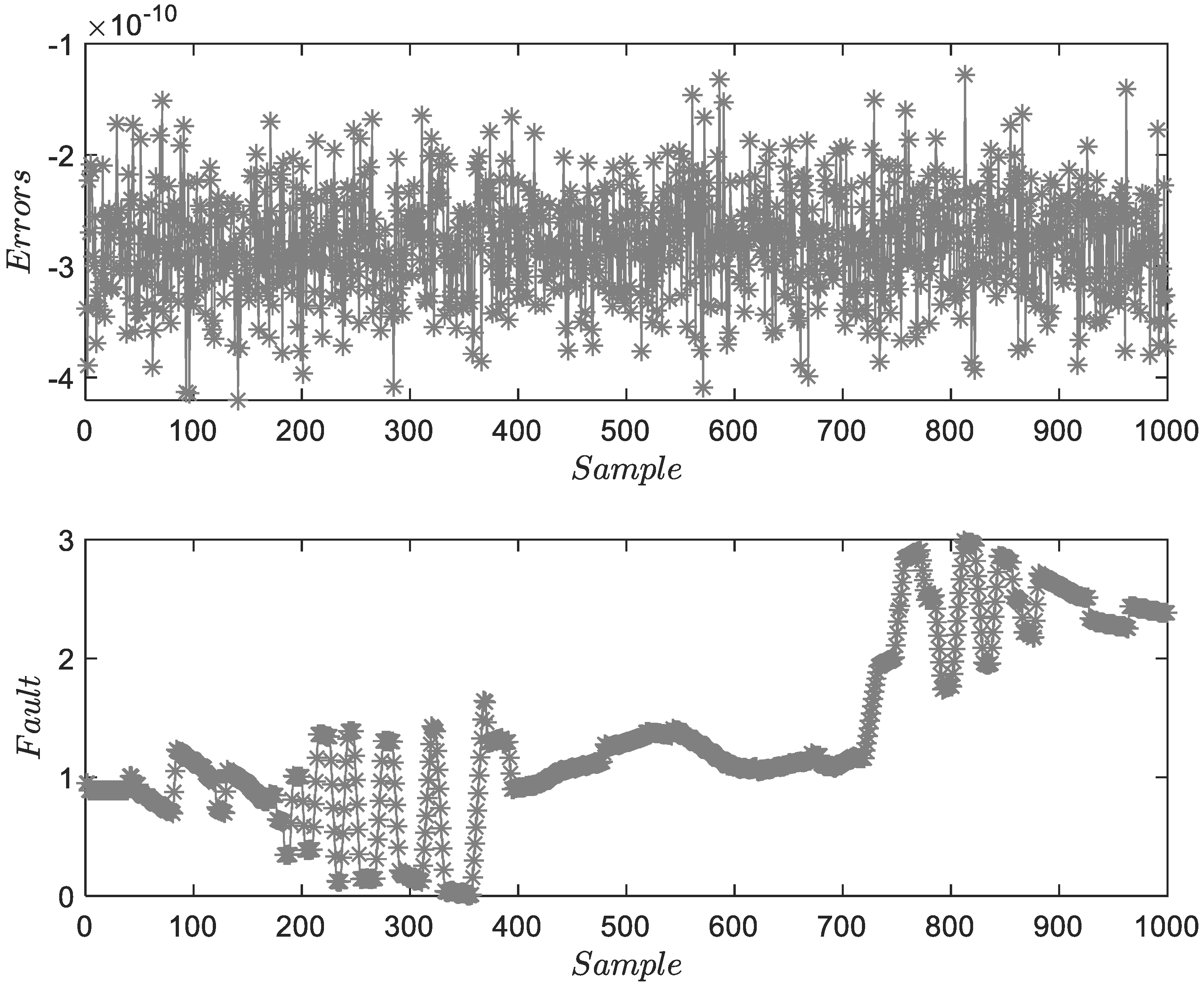
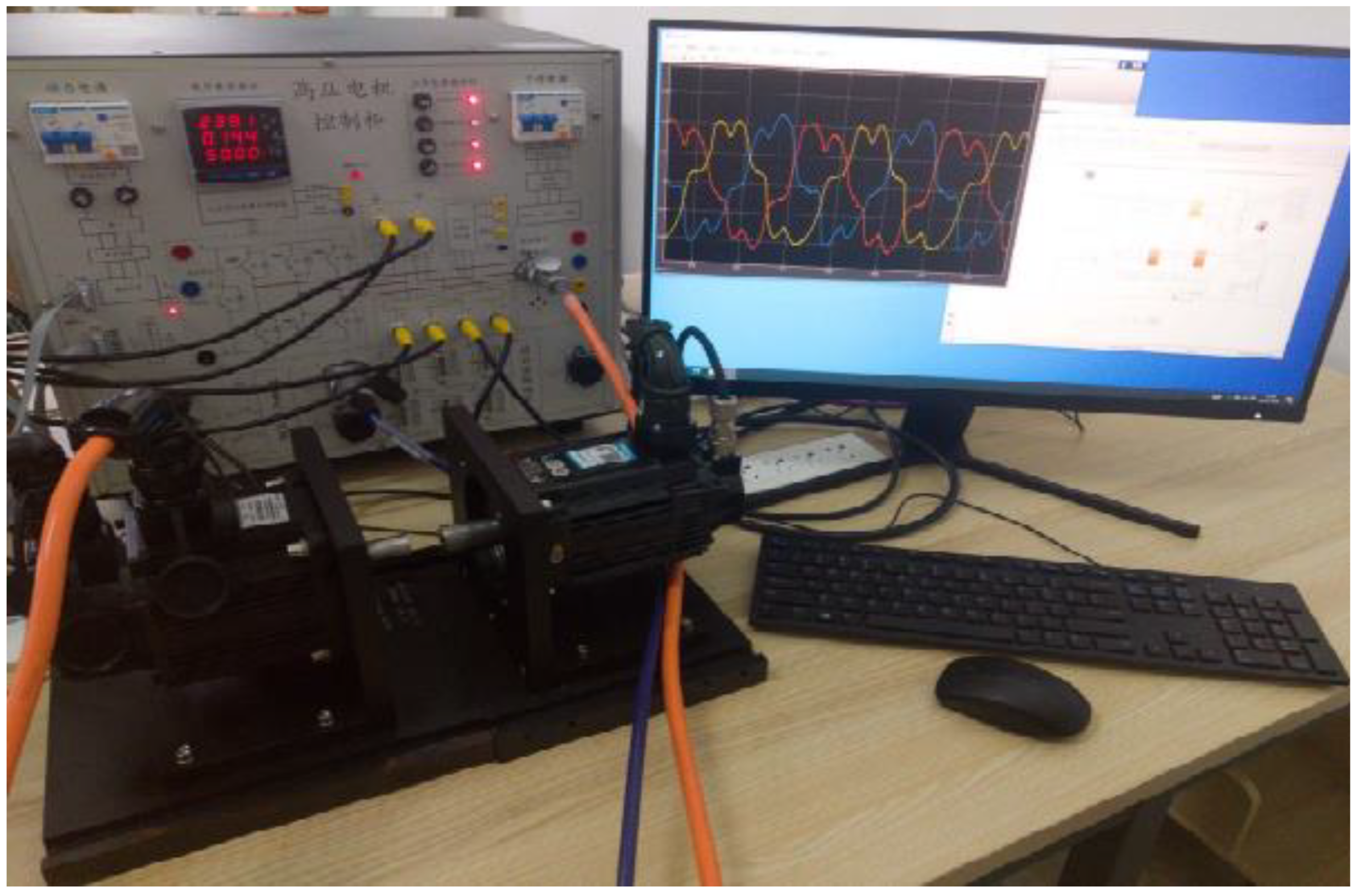
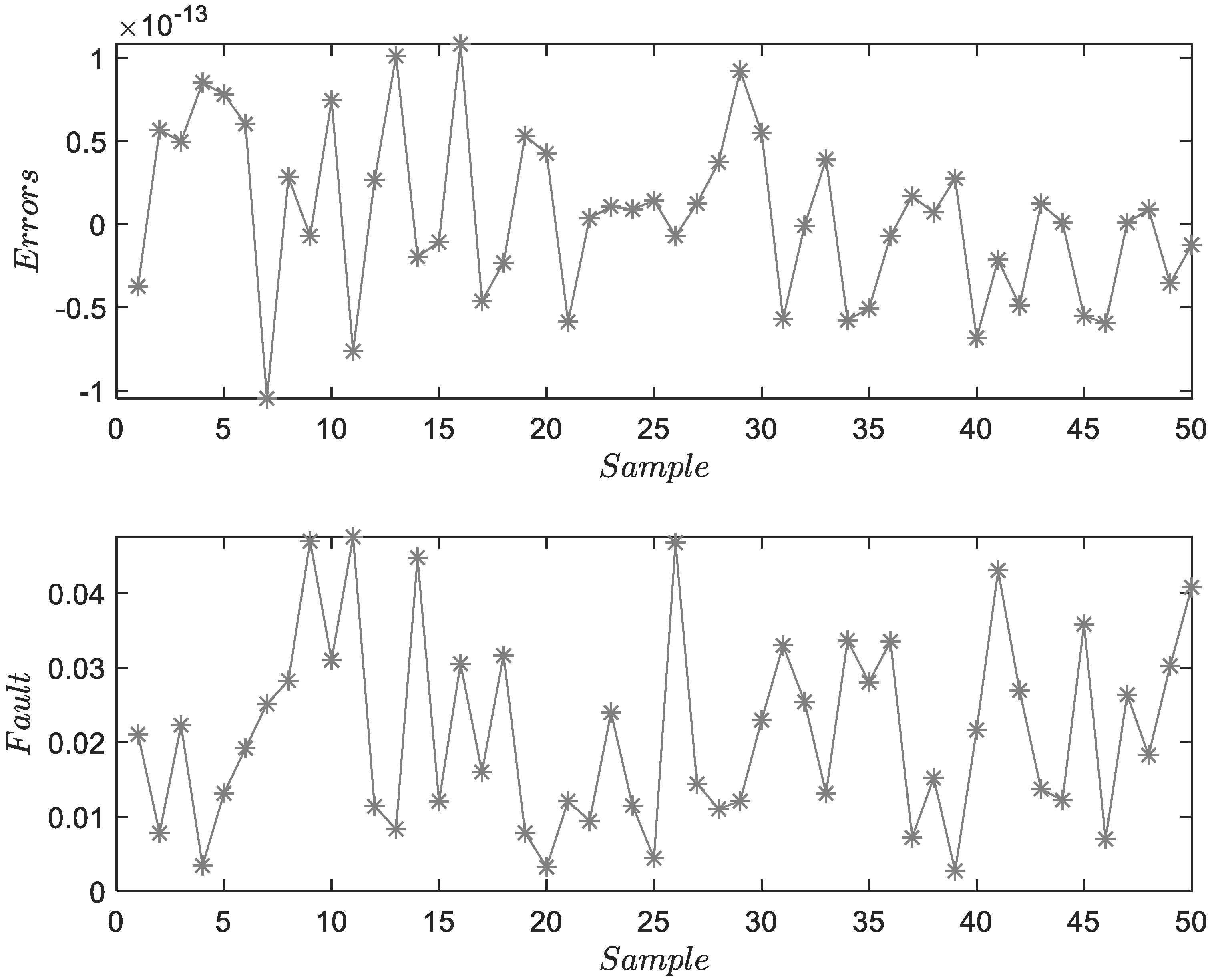
4.2. Experiment on a Pilot-Scale Traction Motor Platform
- (1)
- Fault 4: is a sensor fault with a fault amplitude of 0.025.
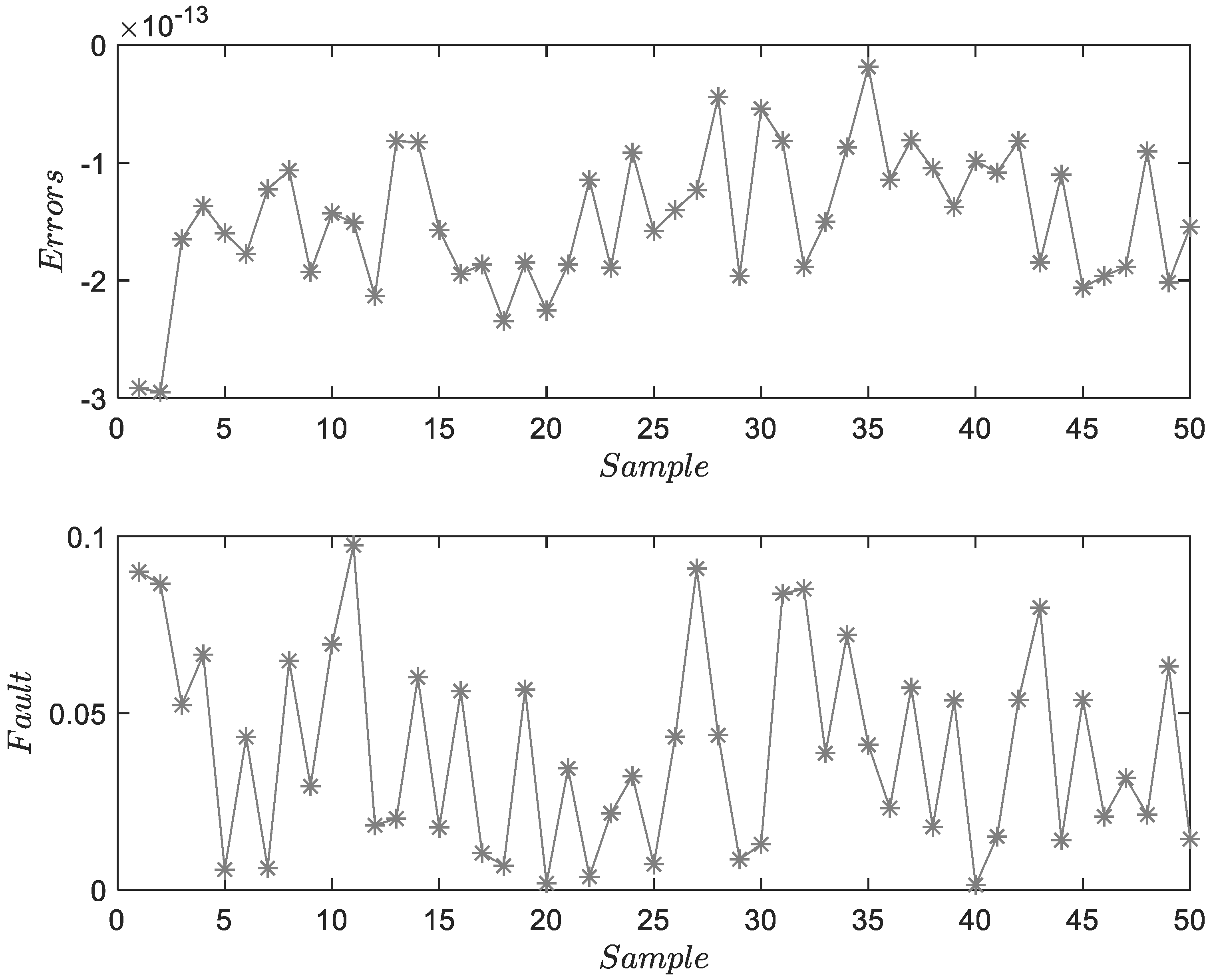
- (2)
- Fault 5: is a sensor fault with a fault amplitude of 0.05.
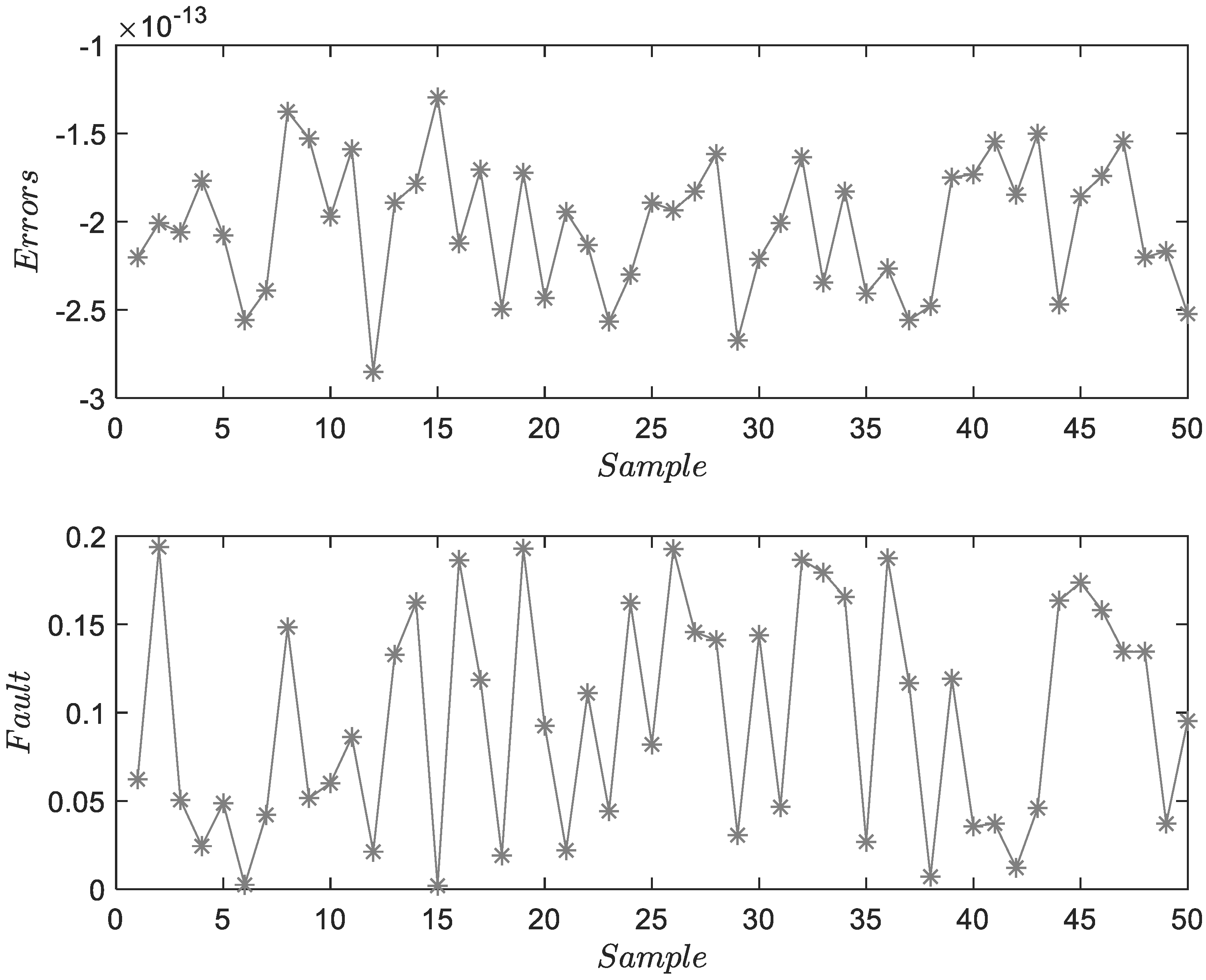
- (3)
- Fault 6: is a sensor fault with a fault amplitude of 0.1.
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MP | Martingale posterior |
| FD | Fault detection |
| FE | Fault estimation |
| MSAM | Multivariate statistic analysis-based method |
| SIM | Subspace identification-based method |
| PCA | Principal component analysis |
| PLS | Partial least squares |
| CCA | Canonical correlation analysis |
| SKR | Stable kernel representation |
| SIR | Stable image representation |
References
- Gao, Z.; Cecati, C.; Ding, S. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis with Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Edwards, C.; Simani, S. Fault Diagnosis and Fault-Tolerant Control in Aerospace Systems. Int. J. Robust Nonlinear Control 2019, 29, 5291–5292. [Google Scholar] [CrossRef]
- Chen, H.; Sun, W.; Zhang, W.; Jiang, B.; Ding, S.; Huang, B. Explainable Fault Diagnosis Using Invertible Neural Networks-Part I: A Left Manifold-based Solution. IEEE Trans. Neural Networks Learn. Syst. 2024. [Google Scholar] [CrossRef]
- He, J.; Ouyang, M.; Chen, Z.; Chen, D.; Liu, S. A Deep Transfer Learning Fault Diagnosis Method Based on WGAN and Minimum Singular Value for Non-Homologous Bearing. IEEE Trans. Instrum. Meas. 2022, 71, 3509109. [Google Scholar] [CrossRef]
- Schmid, M.; Gebauer, E.; Hanzl, C.; Endisch, C. Active Model-Based Fault Diagnosis in Reconfigurable Battery Systems. IEEE Trans. Power Electron. 2021, 36, 2584–2597. [Google Scholar] [CrossRef]
- Chen, H.; Luo, H.; Huang, B.; Jiang, B.; Kaynak, O. Transfer Learning-motivated Intelligent Fault Diagnosis Designs: A Survey, Insights, and Perspectives. IEEE Trans. Neural Networks Learn. Syst. 2024, 35, 2969–2983. [Google Scholar] [CrossRef]
- Li, D. Robust Fault Detection and Estimation Observer Design for Switch Systems. Nonlinear Anal. Hybrid Syst 2019, 34, 30–42. [Google Scholar] [CrossRef]
- Cui, Z.; Hu, W.; Zhang, G.; Huang, Q.; Chen, Z.; Blaabjerg, F. A Novel Data-Driven Online Model Estimation Method for Renewable Energy Integrated Power Systems with Random Time Delay. IEEE Trans. Power Syst. 2023, 38, 5930–5933. [Google Scholar] [CrossRef]
- Yu, M.; Wang, W.; Wang, Y. Closed-Loop Continuous-Time Subspace Identification with Prior Information. Mathematics 2023, 11, 4924. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Lu, N.; Mao, Z. Deep PCA Based Real-Time Incipient Fault Detection and Diagnosis Methodology for Electrical Drive in High-Speed Trains. IEEE Trans. Veh. Technol. 2018, 67, 4819–4830. [Google Scholar] [CrossRef]
- Li, Z.; Pang, W.; Liang, H.; Chen, G.; Zheng, X.; Ni, P. Multicomponent Alkane IR Measurement System Based on Dynamic Adaptive Moving Window PLS. IEEE Trans. Instrum. Meas. 2022, 71, 7006313. [Google Scholar] [CrossRef]
- Xiu, X.; Li, Y. Learning Sparse Kernel CCA with Graph Priors for Nonlinear Process Monitoring. IEEE Sens. J. 2023, 23, 7381–7389. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, B.; Han, M. A Novel Distributed Data-Driven Strategy for Fault Detection of Multi-Source Dynamic Systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4379–4383. [Google Scholar] [CrossRef]
- Bi, P.; Du, X. Arbitrary Triangle Structure Adaptive Mean PCA and Image Recognition. IEEE Trans. Circuits Syst. Video Technol. 2024, 34, 754–769. [Google Scholar] [CrossRef]
- Shah, M.; Ahmed, Z.; Lisheng, H. Weighted Linear Local Tangent Space Alignment via Geometrically Inspired Weighted PCA for Fault Detection. IEEE Trans. Ind. Inf. 2023, 19, 210–219. [Google Scholar] [CrossRef]
- Zhang, C.; Dong, J.; Meng, S.; Cong, Z.; Peng, K. A Two-Layer Distributed Fault Diagnosis Method Based on Correlation Feature Transfer for Large-Scale Sequential Process Industries. IEEE Trans. Instrum. Meas. 2023, 73, 3501214. [Google Scholar] [CrossRef]
- Rishi, M.; Tangirala, A. Probabilistic Adaptive Slow Feature Analysis for State Estimation and Classification. IEEE Trans. Instrum. Meas. 2024, 73, 1002515. [Google Scholar] [CrossRef]
- Ding, S. Data-Driven Design of Monitoring and Diagnosis Systems for Dyanamic Processes: A Review of Subspace Technique Based Schemes and Some Recent Results. J. Process Control 2014, 24, 431–449. [Google Scholar] [CrossRef]
- Huo, M.; Luo, H.; Cheng, C.; Li, K.; Yin, S.; Kaynak, O.; Zhang, J.; Tang, D. Subspace-Aided Sensor Fault Diagnosis and Compensation for Industrial Systems. IEEE Trans. Ind. Electron. 2023, 70, 9474–9482. [Google Scholar] [CrossRef]
- Zhao, Z.; Xu, Y.; Li, Y.; Zhao, Y.; Wang, B.; Wen, G. Sparse Actuator Attack Detection and Identification: A Data-Driven Approach. IEEE Trans. Cybern. 2023, 53, 4054–4064. [Google Scholar] [CrossRef]
- Yu, M.; Wang, Y.; Wang, W.; Wei, Y. Continuous-Time Subspace Identification with Prior Information Using Generalized Orthonormal Basis Functions. Mathematics 2023, 11, 4765. [Google Scholar] [CrossRef]
- Yin, S.; Gao, H.; Qiu, J.; Kaynak, O. Fault Detection for Nonlinear Process with Deterministic Disturbances: A Just-In-Time Learning Based Data Driven Method. IEEE Trans. Cybern. 2017, 47, 3649–3657. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Ding, S.; Luo, H.; Zhang, K. An Alternative Data-Driven Fault Detection Scheme for Dyanmic Processes with Deterministic Disturbances. J. Franklin Inst. 2017, 354, 556–570. [Google Scholar] [CrossRef]
- Luo, H.; Yin, S.; Kayank, O. A Data-Driven Fault Detection Approach for Dynamic Processes with Sinusoidal Disturbance. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Miyazaki, Japan, 7–10 October 2018. [Google Scholar]
- Xu, S. Disturbance Observer-Based Adaptive Fault Tolerant Control with Prescribed Performance of a Continuum Robot. Actuators 2024, 13, 267. [Google Scholar] [CrossRef]
- Li, L.; Ding, S.; Peng, X. Optimal Observer-Based Fault Detection and Estimation Approaches for T–S Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 579–590. [Google Scholar] [CrossRef]
- Liang, D.; He, Z.; Ding, S.; Yang, Y. Distributed Fault Estimation and Fault-Tolerant Control of Interconnected Systems with Plug-and-Play Features. IEEE Trans. Circuits Syst. I Regul. Pap. 2024, 71, 431–442. [Google Scholar] [CrossRef]
- Hu, Y.; Dai, X.; Wu, Y.; Jiang, B.; Cui, D.; Jia, Z. Robust Fault Estimation and Fault-Tolerant Control for Discrete-Time Systems Subject to Periodic Disturbances. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 2982–2994. [Google Scholar] [CrossRef]
- Liang, Y.; Zhang, J.; Shi, Z.; Zhao, H.; Wang, Y.; Xing, Y.; Zhang, X.; Wang, Y.; Zhu, H. A Fault Identification Method of Hybrid HVDC System Based on Wavelet Packet Energy Spectrum and CNN. Electronics 2024, 13, 2788. [Google Scholar] [CrossRef]
- Song, C.; Yang, Y. Nonlinear-Observer-Based Neural Fault-Tolerant Control for a Rehabilitation Exoskeleton Joint with Electro-Hydraulic Actuator and Error Constraint. Appl. Sci. 2023, 13, 8294. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, W.; Ran, G.; Chen, H. Data-Driven Designs of Fault Identification via Collaborative Deep Learning for Traction Systems in High-Speed Trains. IEEE Trans. Transp. Electrif. 2022, 8, 1748–1757. [Google Scholar] [CrossRef]
- Mu, D.; Lin, S.; Zhang, H.; Zheng, T. A Novel Fault Identification Method for HVDC Converter Station Section Based on Energy Relative Entropy. IEEE Trans. Instrum. Meas. 2022, 71, 3507910. [Google Scholar] [CrossRef]
- Hassan, M.; Hossain, M.; Shah, R. DC Fault Identification in Multiterminal HVDC Systems Based on Reactor Voltage Gradient. IEEE Access 2021, 9, 115855–115867. [Google Scholar] [CrossRef]
- Ma, G.; Zhang, H.; Sun, Z.; Yao, C.; Ren, G.; Xu, S. Current Sensor Fault Localization and Identification of PMSM Drives Using Difference Operator. IEEE J. Emerging Sel. Top. Power Electron. 2023, 11, 1097–1110. [Google Scholar] [CrossRef]
- Yang, S.; Sun, X.; Ma, M.; Zhang, X.; Chang, L. Fault Detection and Identification Scheme for Dual-Inverter Fed OEWIM Drive. IEEE Trans. Ind. Electron. 2020, 67, 6112–6123. [Google Scholar] [CrossRef]
- Wang, Z.; Han, C.; Gao, H.; Guo, F. Identification of Series Arc Fault Occurred in the Three-Phase Motor with Frequency Converter Load Circuit via VMD and Entropy-Based Features. IEEE Sens. J. 2022, 22, 24320–24332. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, X.; Yang, P.; Hua, W.; Buja, G. Effects of Triangular Wave Injection and Current Differential Terms on Multiparameter Identification for PMSM. IEEE Trans. Power Electron. 2024, 39, 2943–2947. [Google Scholar] [CrossRef]
- Zhang, Z.; Ren, J.; Tang, X.; Jing, S.; Lee, W. Novel Approach for Arc Fault Identification with Transient and Steady State Based Time-Frequency Analysis. IEEE Trans. Ind. Appl. 2022, 58, 4359–4369. [Google Scholar] [CrossRef]
- Husari, F.; Seshadrinath, J. Early Stator Fault Detection and Condition Identification in Induction Motor Using Novel Deep Network. IEEE Trans. Artif. Intell. 2022, 3, 809–818. [Google Scholar] [CrossRef]
- Langarica, S.; Ruffelmacher, C.; Nunez, F. An Industrial Internet Application for Real-Time Fault Diagnosis in Industrial Motors. IEEE Trans. Autom. Sci. Eng. 2020, 17, 284–295. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Z.; Wei, L.; Wang, X.; Li, L. Braking Sensor and Actuator Fault Diagnosis with Combined Model-Based and Data-Driven Pressure Estimation Methods. IEEE Trans. Ind. Electron. 2023, 70, 11639–11648. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, Y.; Dai, Y.; Sun, Y. Arc Grounding Fault Identification Using Integrated Characteristics in the Power Grid. Energy Eng. 2024, 121, 1883–1901. [Google Scholar] [CrossRef]
- Tian, J.; Zeng, G.; Zhao, J.; Zhu, X.; Zhang, Z. A Data-Driven Modeling Method of Virtual Synchronous Generator Based on LSTM Neural Network. IEEE Trans. Ind. Inf. 2024, 20, 5428–5439. [Google Scholar] [CrossRef]
- Sun, W.; Shi, X.; Xiong, W.; Chen, H.; Huang, B. A Conditional Invertible Neural Network-based Fault Detection. TechRxiv 2024. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, G.; Wang, R.; Xiong, W. A Real-Time Adaptive Energy Optimization Method for Urban Rail Flexible Traction Power Supply System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10155–10164. [Google Scholar] [CrossRef]
- Sameni, R.; Shamsollahi, M.; Jutten, C.; Clifford, G. A Nonlinear Bayesian Filtering Framework for ECG Denoising. IEEE Trans. Biomed. Eng. 2007, 54, 2172–2185. [Google Scholar] [CrossRef]
- Liu, X.; Liu, X.; Yang, Y.; Guo, Y.; Zhang, W. Variational Bayesian-Based Robust Cubature Kalman Filter with Application on SINS/GPS Integrated Navigation System. IEEE Sens. J. 2022, 22, 489–500. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Cheng, D.; Chen, W.; Chen, C. Marine Extended Target Tracking for Scanning Radar Data Using Correlation Filter and Bayes Filter Jointly. Remote Sens. 2022, 14, 5937. [Google Scholar] [CrossRef]
- Brouillon, J.; Fabbiani, E.; Nahata, P.; Moffat, K.; Dorfler, F.; Trecate, G. Bayesian Error-in-Variables Models for the Identification of Distribution Grids. IEEE Trans. Smart Grid 2023, 14, 1289–1299. [Google Scholar] [CrossRef]
- Fong, E.; Lyddon, S.; Holmes, C. Scalable Nonparametric Sampling from Multimodal Posteriors with the Posterior Bootstrap. In Proceedings of the 36th International Conference on Machine Learning, Online, 9 June 2019. [Google Scholar]
- Wu, L.; Williamson, S. Posterior Uncertainty Quantification in Neural Networks using Data Augmentation. In Proceedings of the 27th International Conference on Artificial Intelligence and Statistics, Valencia, Spain, 2 May 2024. [Google Scholar]
- Yang, X.; Yang, C.; Peng, T.; Chen, Z.; Liu, B.; Gui, W. Hardware-in-the-Loop Fault Injection for Traction Control System. IEEE J. Emerging Sel. Top. Power Electron. 2018, 6, 696–706. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | MSE1 | MSE2 | MSE3 | Time Consumption |
|---|---|---|---|---|
| DSFA | −5.84 | 1.96 | 53.57 | 1.85 s |
| CCA | 1.12 | 1.98 | 1.87 | 1.42 s |
| FCNN | 0.010 | 0.028 | 0.063 | 1.34 s |
| LSTM | 0.202 | 0.364 | 0.252 | 6.90 s |
| The proposed method | 4.12 | 0.013 | 0.004 | 0.25 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, C.; Wang, W.; Di, H.; Li, X.; Lv, H.; Wan, Z. A Martingale Posterior-Based Fault Detection and Estimation Method for Electrical Systems of Industry. Mathematics 2024, 12, 3200. https://doi.org/10.3390/math12203200
Cheng C, Wang W, Di H, Li X, Lv H, Wan Z. A Martingale Posterior-Based Fault Detection and Estimation Method for Electrical Systems of Industry. Mathematics. 2024; 12(20):3200. https://doi.org/10.3390/math12203200
Chicago/Turabian StyleCheng, Chao, Weijun Wang, He Di, Xuedong Li, Haotong Lv, and Zhiwei Wan. 2024. "A Martingale Posterior-Based Fault Detection and Estimation Method for Electrical Systems of Industry" Mathematics 12, no. 20: 3200. https://doi.org/10.3390/math12203200
APA StyleCheng, C., Wang, W., Di, H., Li, X., Lv, H., & Wan, Z. (2024). A Martingale Posterior-Based Fault Detection and Estimation Method for Electrical Systems of Industry. Mathematics, 12(20), 3200. https://doi.org/10.3390/math12203200