1.1. Introduction on the Background
Infectious diseases have long been a significant challenge throughout human history, ranging from ancient plagues and the Black Death to modern-day pandemics such as influenza, AIDS, and, in recent years, the novel coronavirus. The outbreak of infectious diseases poses significant threats to human health and has profound impacts on society, the economy, and politics. Therefore, the research of infectious diseases has consistently remained a critical global agenda.
Researchers have developed a diverse array of mathematical models to gain a deeper understanding of the transmission mechanisms of infectious diseases, anticipate their developmental trends, and evaluate the effectiveness of various prevention and control strategies. Among these, differential equation-based models for infectious diseases, including the SIR model and SEIR model, have been widely used and continuously evolved. In 1927, Kermack and McKendrick [
1] established the classic deterministic SIR model. They divided the population into three individuals:
- (S)
Susceptible individuals—These individuals are not immune to the disease and, therefore, vulnerable to infection.
- (I)
Infected individuals—These individuals are currently infected with the disease and can spread it to other susceptible individuals.
- (R)
Removed individuals—These individuals have been infected with the disease, have recovered from it, and are now immune to further infection.
Let
,
, and
denote the number of susceptible individuals, infected individuals, and removed individuals, respectively, at time
t. Then the classical deterministic SIR model in [
2] is formulated by the following ordinary differential equations (ODEs)
where
is the birth rate of the population per unit time,
,
as the natural death rates of
,
, and
, respectively.
is the effective contact rate between
and
,
represents the recovery rate of infected individuals, and
reflects the additional disease-induced death rate of the infected individuals. These epidemiological parameters are all positive constants. In particular, with the development of infectious disease dynamics, many results about the deterministic SIR model can be found in [
3,
4,
5,
6].
The bilinear term
in the system (
1) is a good approximation of the incidence to study some certain infectious diseases, such as dengue fever and avian influenza, see [
7,
8]. However, in the spread of some sexually transmitted diseases (STDs), such as AIDS and syphilis, etc., the number of people infected by each carrier may gradually decrease as the number of infected individuals increases. This is because people take measures to protect themselves or reduce contact with infected individuals as the disease spreads, which reduces the infection rate. However, the bilinear incidence rate assumes that each carrier can infect infinitely many people, which does not agree with the reality. In addition, the mathematical expression of the sublinear incidence rate is more complex than the bilinear incidence rate, which can better fit the actual data of disease transmission and more accurately predict the future development trend of the disease.
In [
9], Zhou et al. introduced the nonlinear incidence rate
, where the function
is twice continuously differentiable and satisfies:
Significantly, the condition
(i) of
indicates that there will be no contact infections when no infected individuals are in the population. Besides, as the number of infected individuals increases, the risk of disease transmission will also increase accordingly. The condition (
ii) of
reflects the assumption of sublinear incidence, where people will take measures to protect themselves or reduce contact with infected individuals, thereby reducing the infection rate. In particular, the deterministic SIR model in [
9] was described by the following equations
and they obtained that the system (
3) has an invariant attracting set
and the basic reproduction number is
. If
, there is a disease-free equilibrium
, which is globally asymptotically stable on
. If
,
is unstable, but there exists a unique endemic equilibrium
of system (
3) and it is globally asymptotically stable on
, where
,
, and
is solved by the nonlinear equation
.
In real life, due to the fact that the spread of infectious diseases is affected by many random factors, the introduction of stochastic epidemic models can provide more accurate predictions of the dynamic spread of diseases. By combining epidemic models with stochastic theory, we can better understand the mechanism of disease transmission and more accurately predict its spread, providing a solid foundation for public health departments to make scientific decisions. Therefore, stochastic epidemic models have essential application value in revealing the laws of disease transmission and formulating effective prevention and control strategies. The research on stochastic epidemic models has been emerging in recent years, leading to significant advancements. Jiang et al. [
10] analyzed the asymptotic behavior of the following stochastic SIR model
where
are independent standard Brownian motions with intensities
. Liu and Jiang [
11] constructed a stochastic SIR model with distributed delay, building upon the deterministic model (
1) and studied the disease extinction conditions of this model. El Hajji, Sayari, and Zaghdani in [
12] considered the deterministic and stochastic SIR infectious disease models with nonlinear incidence rates in continuous reactors. They studied the asymptotic behavior of the solutions and established the conditions for disease persistence and extinction.
Notably, the infectious disease models studied in the mentioned works are all affected by white noise, and their solutions exhibit continuous characteristics. However, actual population systems may be subject to sudden environmental perturbations, such as earthquakes, volcanic eruptions, and tsunamis, etc. These extreme situations can interrupt the continuity of the solution, making traditional stochastic models unable to describe the system’s dynamic behavior accurately. To capture this discontinuous, researchers introduced the Lévy jump process, a stochastic process that can capture sudden, large-scale changes. This process is particularly suitable for describing population systems affected by sudden perturbations. In biology, Lévy jump process describes many biological phenomena, including animal predation behavior and population diffusion. Recently, it has also been applied to infectious disease models to describe the spread of disease better, see [
13,
14,
15]. In [
13,
14], they considered stochastic SIR models with Lévy jumps and specific incidence rates. Although these models have particular applications in specific situations, they lack generality. In [
15], the authors conducted in-depth research on the dynamic behavior of SVIR models with Lévy jumps.
In this paper, we suppose that massive environmental events can affect the disease transmission rate
in model (
3), and the stochastic perturbations are of Lévy noise type, that is
where
is a standard Brownian motion on the probability space
satisfying the usual condition, and
is the intensity of
.
, where
, and
N is a Poisson counting measure with characteristic measure
v on the measurable subset
of
with
.
In this sense, the corresponding stochastic version of the system (
3) with Lévy jumps is obtained as follows
where
represents the effect of random jumps. We assume that
Q is continuous with respect to the first variable and
-measurable. Here,
is a
-algebra on
.
Besides, the biological system typically possesses inherent stability and adaptability, and the evolution process of living organisms is a long-lasting, harmonious coexistence with the environment. In the face of sudden environmental changes or special events, these organisms can maintain a relatively stable state through their own regulatory and adaptive mechanisms. Over time, they have also developed a series of mechanisms and strategies to respond to external environmental disturbances. Therefore, we assume that the intensity of the jumps is nonnegative and bounded, which can be seen as an expression of the self-regulatory ability of the biological system in response to external disturbances, or an expression of the evolved adaptability of living organisms when facing the jumping behavior during the spread of infectious diseases. These assumptions bring the model closer to biological reality, enhancing its practical rationality.
Assumption 1. , .
This article considers the random effects and the impact of emergencies on the spread of infectious disease models. It introduces a general nonlinear incidence rate, making the infectious disease model more realistic and widely applicable. This improvement enables the model to simulate the spread of infectious diseases more accurately, providing a more reliable basis for formulating prevention and control strategies. In the following content, we present the main results of this SIR model (
6) in
Section 1.2 and give the proofs of these results in
Section 2. We provide some examples and numerical simulations in
Section 3. Finally, we give a meaningful conclusion of this article in
Section 4 and add an
Appendix A to introduce some lemmas and necessary mathematical notations at the end.
1.2. Main Results
In order to study the dynamic behavior of the population system (
6), it is necessary to consider whether the solution is positive and global. In [
16], it is shown that for any given initial value, if the coefficients of the stochastic differential equation with jumps satisfy the linear growth condition and local Lipschitz continuity, the stochastic differential equation has a unique global solution (that is, it does not explode in finite time). However, the coefficients of Equation (
6) do not satisfy the linear growth condition, which means that the solution of this system may explode in a finite time.
The following theorem presents the region
is almost surely invariant for the system (
6) by using the Lyapunov analysis from [
17].
Theorem 1. For any initial value , this model (6) has a unique positive solution
The basic reproduction number of infectious disease models is a crucial parameter that indicates how many healthy individuals each infected individual can transmit the disease to in a completely susceptible population. This parameter plays a pivotal role in evaluating the transmission potential of infectious diseases, predicting the spread dynamics of the illness, and devising prevention and control strategies. In deterministic model (
3), the value of
determines whether the disease in system (
3) persists or die out. In the following theorem, we establish sufficient conditions for disease extinction in the model (
6) and present that noise will affect disease extinction.
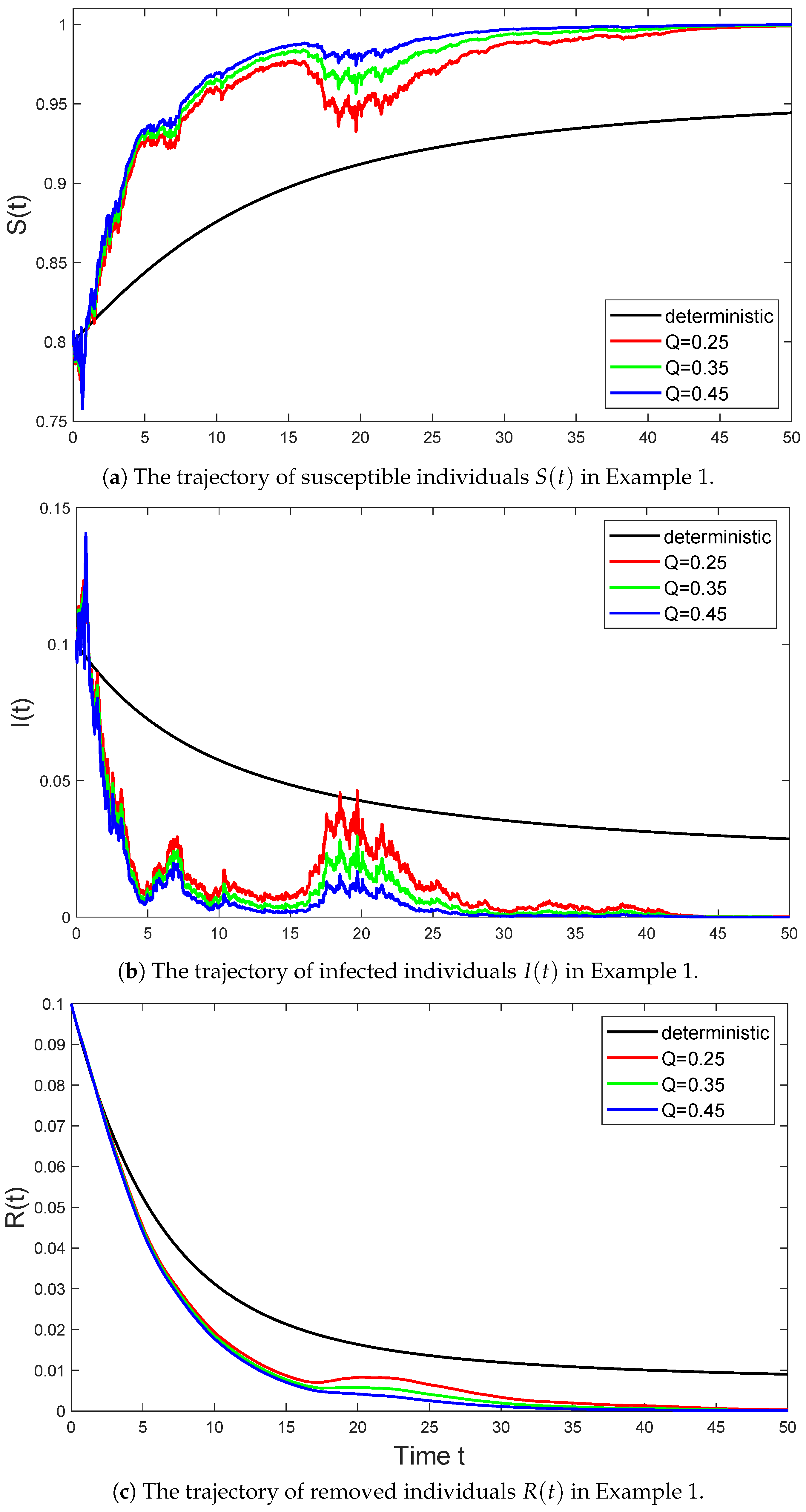
Theorem 2. For any initial value , the solution of system (6) satisfies - (i)
a.s. if and ;
- (ii)
a.s. if .
Namely, the infectious disease tends to zero exponentially a.s. in these two cases.
Remark 1. (1) The expression of reveals that stochastic perturbations impact the extinction of the disease in system (6). Additionally, the disease extinction condition of the model (6) is weaker than that of the model (3). (2) The study of disease extinction can help people to utilize medical and social resources effectively. For instance, when a disease is on the verge of extinction, appropriate adjustments can be made to the allocation and utilization of medical resources to allocate more resources to treating and preventing other diseases.
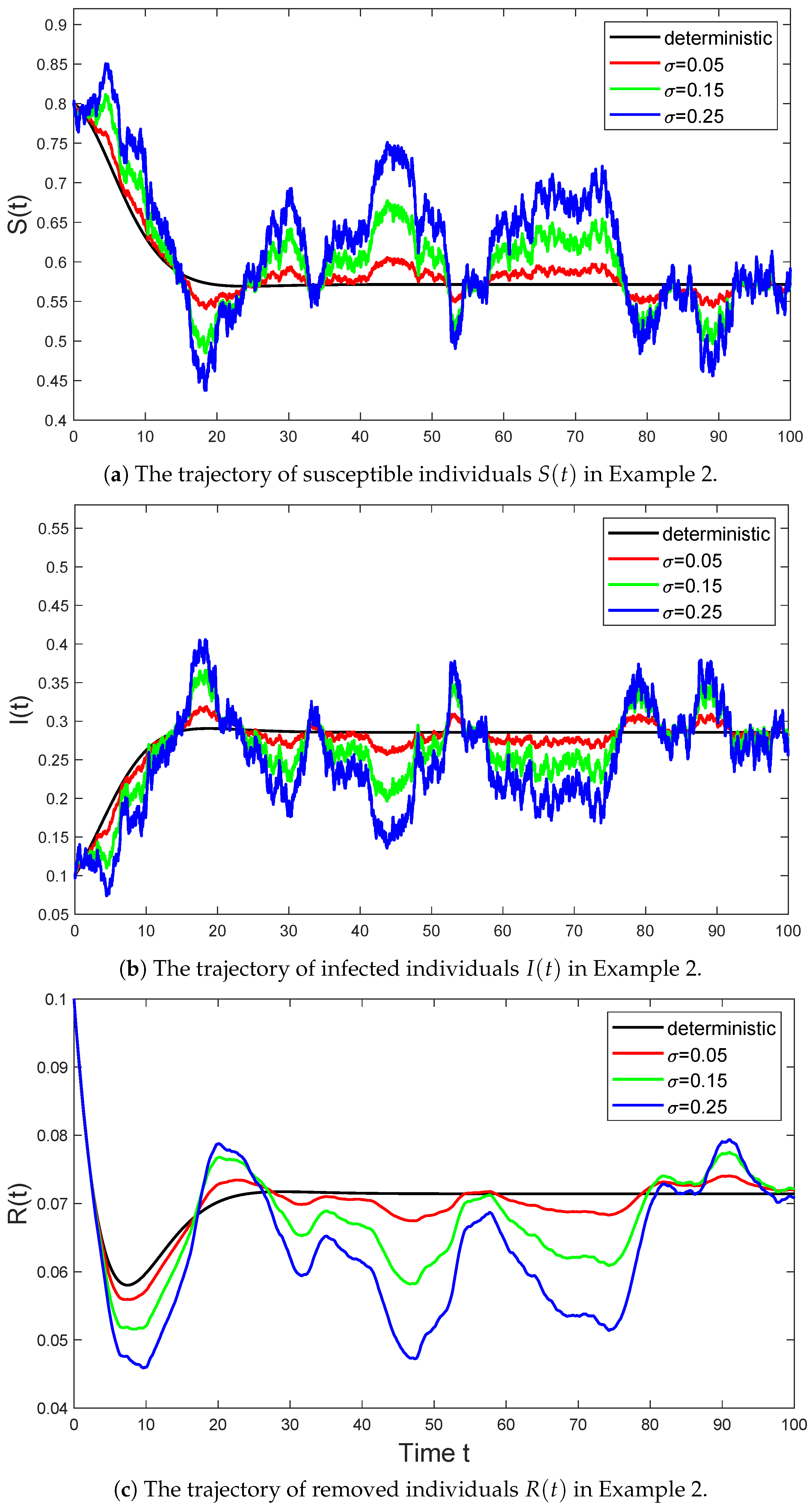
In both the natural world and human society, many infectious diseases persist and evolve over time. By studying the persistence of diseases through stochastic SIR models, we can better understand the mechanisms behind disease persistence and evolution. Now, we establish sufficient conditions for the persistence of this disease in the following theorem. Firstly, the persistence in the mean of system (
6) is defined as follows.
Definition 1. System (6) is said to be persistence in the mean, if Theorem 3. If , the solution of model (6) with any initial value satisfieswhere . Remark 2. By the condition (2) of , we know that , this indicates that while the stochastic system (6) may rapidly approach extinction, the model (3) may continue to exist. In 1892, Lyapunov [
18] introduced the concept of stability for dynamic systems: if the trajectory of the system remains close to the equilibrium state for any initial condition, then the system is said to be Lyapunov stable under those initial conditions. This stability notion is an important theory for analyzing system stability, especially in the field of automatic control, where it is widely used in the design of dynamic systems. We use the definitions of stability introduced in [
17] and demonstrate the globally stochastically asymptotically stable of system (
6) on
.
Theorem 4. If , then the disease-free equilibrium is globally stochastically asymptotically stable on the region .
If
, the deterministic SIR model (
3) has an endemic equilibrium
. However,
is not the endemic equilibrium for stochastic system (
6). Then, the dynamic of the solution
of system (
6) around
is discussed in the following theorem.
Theorem 5. If holds, then the solution of system (6) with has the propertywhere Remark 3. Based on the above results, we can observe that as the number of random factors gradually increases, the deviation of the solution of the stochastic SIR model from the deterministic model also gradually increases. This indicates that randomness significantly impacts the spread of diseases, leading to discrepancies in epidemic trends from those predicted by deterministic models. Therefore, when formulating prevention and control strategies, it is crucial to consider the influence of random factors and adopt more flexible and effective measures to address the spread and evolution of diseases.

{kind=link}
{kind=link}
{kind=link}