
Reachable Set Estimation and Controller Design for Linear Time-Delayed Control System with Disturbances



Abstract
1. Introduction
- We derived a sufficient condition that determines the admissible bounding ellipsoid for the reachable set related to the delay-dependent system; the condition is in the form of LMI;
- We propose a state feedback controller design method to find the minimum ellipsoidal bound so that the reachable set of the resulting closed-loop system is bounded by an ellipsoid, and the admissible ellipsoid should be as small as possible;
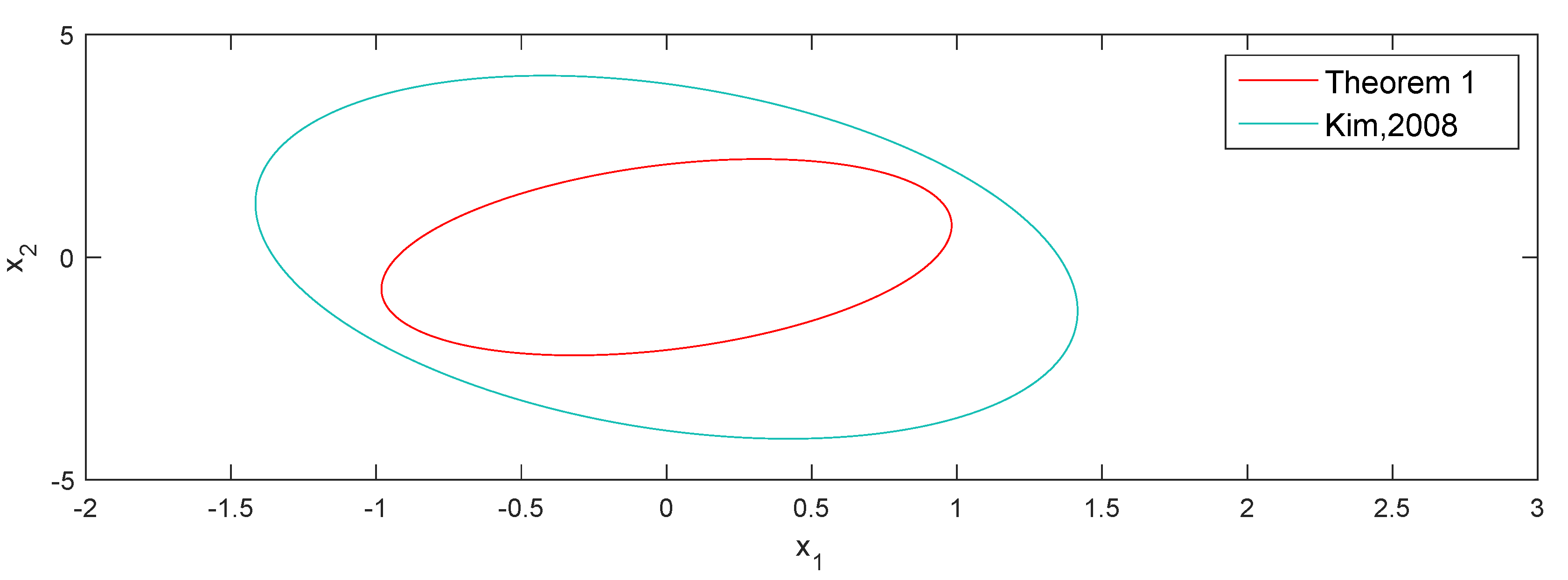
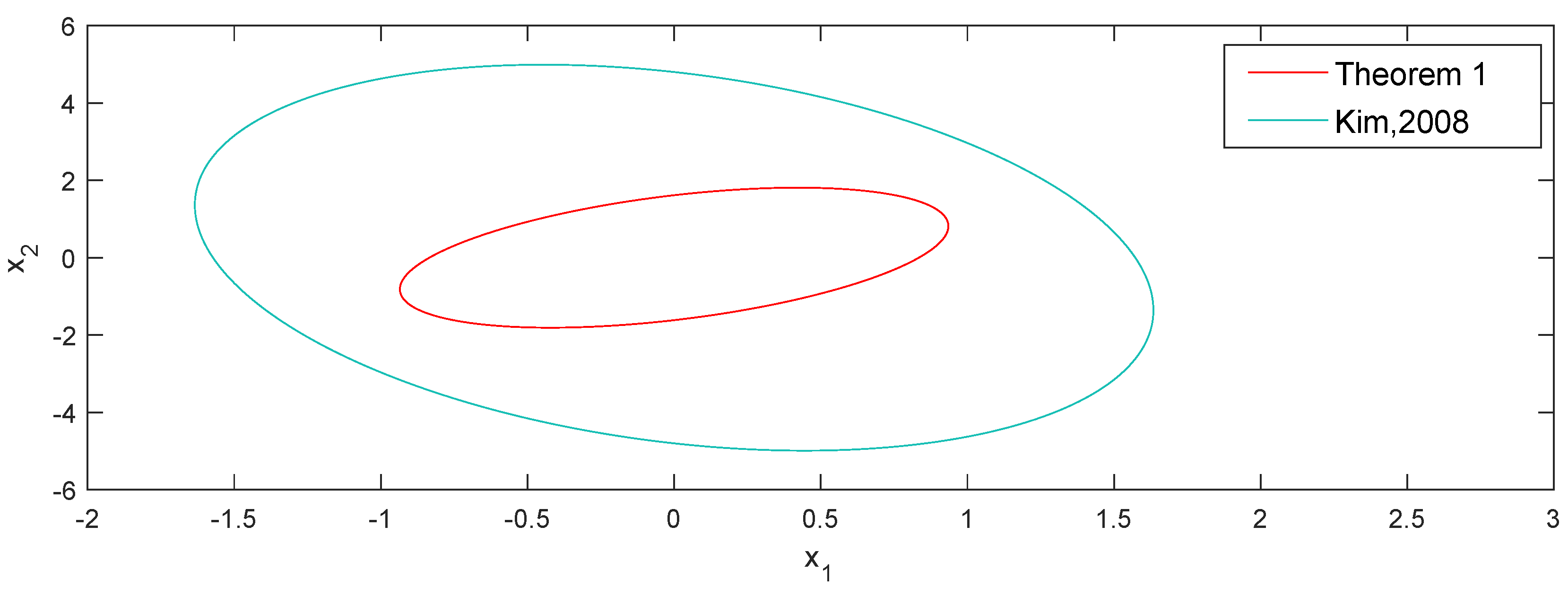
- We show that our conclusion is an extension of the available results in the paper [16].
Notation
2. Problem Statement and Preliminaries
3. Main Results
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, T.; Lin, Z. Control Systems with Actuator Saturation: Analysis and Design; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Hu, T.; Teel, A.R.; Zaccarian, L. Stability and performance for saturated systems via quadratic and nonquadratic Lyapunov functions. IEEE Trans. Autom. Control 2006, 51, 1770–1786. [Google Scholar] [CrossRef]
- Kim, J.-H.; Jabbari, F. Scheduled controllers for buildings under seismic excitation with limited actuator capacity. J. Eng. Mech. 2004, 130, 800–808. [Google Scholar] [CrossRef]
- Abedor, J.; Nagpal, K.; Poola, K. A linear matrix inequality approach to peak-to-peak minimization. Int. J. Robust Nonlinear Control 1996, 6, 899–927. [Google Scholar] [CrossRef]
- Hwang, I.; Stipanovic, D.M.; Tomlin, C.J. Applications of polytopic approximations of reachable sets to linear dynamic games and a class of nonlinear systems. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4613–4619. [Google Scholar]
- Durieu, C.; Walter, E.; Polyak, B. Multi-input multi-output ellipsoidal state bounding. J. Optim. Theory Appl. 2001, 111, 273–303. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in Systems and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Gao, H.; Chen, T. New results on stability of discrete-time systems with time-varying state delay. IEEE Trans. Autom. Control 2007, 52, 328–334. [Google Scholar] [CrossRef]
- Kwon, O.M.; Lee, S.M.; Park, J.H. Stability for neural networks with time-varying delays via some new approaches. IEEE Trans. Neural Netw. Learn. Syst 2013, 24, 181–193. [Google Scholar] [CrossRef] [PubMed]
- Shi, L.; Zhu, H.; Zhong, S.; Hou, L. Globally exponential stability for neural networks with time-varying delays. Appl. Math. Comput. 2013, 219, 10487–10498. [Google Scholar] [CrossRef]
- Xu, S.; Lam, J. Improved delay-dependent stability criteria for time-delay systems. IEEE Trans. Autom. Control 2005, 50, 384–387. [Google Scholar]
- Xiao, N.; Jia, Y. New approaches on stability criteria for neural networks with two additive time-varying delay components. Neurocomputing 2013, 118, 150–156. [Google Scholar] [CrossRef]
- Chen, H.; Zhong, S. New results on reachable set bounding for linear time delay systems with polytopic uncertainties via novel inequalities. J. Inequalities Appl. 2017, 2017, 2346–2350. [Google Scholar] [CrossRef]
- Fridman, E.; Shaked, U. On reachable sets for linear systems with delay and bounded peak inputs. Automatica 2003, 39, 2005–2010. [Google Scholar] [CrossRef]
- Feng, Z.; Zheng, W.X. On reachable set estimation of delay Markovian jump systems with partially known transition probabilities. J. Frankl. Inst. 2016, 353, 3835–3856. [Google Scholar] [CrossRef]
- Kim, J.H. Improved ellipsoidal bound of reachable sets for time-delayed linear systems with disturbances. Automatica 2008, 44, 2940–2943. [Google Scholar] [CrossRef]
- Kwon, O.M.; Lee, S.M.; Park, J.H. On the reachable set bounding of uncertain dynamic systems with time-varying delays and disturbances. Inf. Sci. 2011, 181, 3735–3748. [Google Scholar] [CrossRef]
- Nam, P.T.; Pathirana, P.N. Further result on reachable set bounding for linear uncertain polytopic systems with interval time-varying delays. Automatica 2011, 47, 1838–1841. [Google Scholar] [CrossRef]
- Shen, C.; Zhong, S. The ellipsoidal bound of reachable sets for linear neutral systems with disturbances. J. Frankl. Inst. 2011, 348, 2570–2585. [Google Scholar] [CrossRef]
- Sheng, Y.; Shen, Y. Improved reachable set bounding for linear time-delay systems with disturbances. J. Frankl. Inst. 2016, 353, 2708–2721. [Google Scholar] [CrossRef]
- Wang, W.; Zhong, S.; Liu, F.; Cheng, J. Reachable set estimation for linear systems with time-varying delay and polytopic uncertainties. J. Frankl. Inst. 2019, 356, 7322–7346. [Google Scholar] [CrossRef]
- Zuo, Z.; Ho, D.W.C.; Wang, Y. Reachable set bounding for delayed systems with polytopic uncertainties: The maximal Lyapunov–Krasovskii functional approach. Automatica 2010, 46, 949–952. [Google Scholar] [CrossRef]
- Zuo, Z.; Ho, D.W.C.; Wang, Y. Reachable set estimation for linear systems in the presence of both discrete and distributed delays. IET Control Theory Appl. 2011, 5, 1808–1812. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, Y. Results on reachable set estimation for linear systems with both discrete and distributed delays. IET Control Theory Appl. 2012, 6, 2346–2350. [Google Scholar] [CrossRef]
- Zuo, Z.; Chen, Y.; Wang, Y.; Ho, D.W.C.; Chen, M.Z.Q.; Li, H. A note on reachable set bounding for delayed systems with polytopic uncertainties. J. Frankl. Inst. 2013, 350, 1827–1835. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, Z.; Chen, Y.; Wang, Y. A non-ellipsoidal reachable set estimation for uncertain neural networks with time-varying delay. Commun. Nonlinear Sci. Numer. Simulat. 2014, 19, 1097–1106. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Xie, W.; Shen, Y. Reachable set estimation for uncertain nonlinear systems with time delay. Optim. Control Appl. Methods. 2020, 41, 1644–1656. [Google Scholar] [CrossRef]
- Zhang, L.; Feng, Z.; Jiang, Z.; Zhao, N.; Yang, Y. Improved results on reachable set estimation of singular systems. Appl. Math. Comput. 2020, 385, 125419. [Google Scholar] [CrossRef]
- He, Y.; Wang, Q.; Lin, C.; Wu, M. Delay-range-dependent stability for systems with time-varying delay. Automatica 2007, 43, 371–376. [Google Scholar] [CrossRef]
- Li, T.C.; Zheng, C.X.; Feng, Z.G.; Dinh, T.N.; Raïssi, T. TReal-time reachable set estimation for linear time-delay systems based on zonotopes. Int. J. Syst. Sci. 2023, 54, 1639–1647. [Google Scholar] [CrossRef]
- Ma, X.; Zhang, Y.Y.; Huang, J. Reachable set estimation and synthesis for semi-Markov jump systems. Inf. Sci. 2022, 609, 376–386. [Google Scholar] [CrossRef]
- Zhu, S.; Gao, Y.; Hou, Y.X.; Yang, C.Y. Reachable Set Estimation for Memristive Complex-Valued Neural Networks with Disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 11029–11034. [Google Scholar] [CrossRef]
- Mondie, S.; Kharitonov, V.L. Exponential estimates for retarded time-delay systems: An LMI approach. IEEE Trans. Autom. Control 2005, 50, 268–273. [Google Scholar] [CrossRef]
- Sun, X.M.; Zhao, J.; Hill, D.J. Stability and L2-gain analysis for switched delay systems: A delay-dependent method. Automatica 2006, 42, 1769–1774. [Google Scholar] [CrossRef]
- Rugh, W.J. Linear System Theory, 2nd ed.; Prentice-Hall: Hoboken, NJ, USA, 1996. [Google Scholar]
- Gu, K. An integral inequality in the stability problem of time-delay systems. In Proceedings of the 39th IEEE Conference on Decision and Control (Cat. No. 00CH37187), Sydney, NSW, Australia, 12–15 December 2000; pp. 2805–2809. [Google Scholar]

{kind=link}
{kind=link}
| Method | u | ||||||
|---|---|---|---|---|---|---|---|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | |
| [16] | 2.2586 | 2.4970 | 2.8497 | 3.4355 | 4.5384 | 7.0915 | 16.8263 |
| Theorem 1 | 1.4571 | 1.6372 | 1.8905 | 2.2702 | 2.9171 | 4.2496 | 8.1427 |
| Method | u | ||||||
|---|---|---|---|---|---|---|---|
| 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | |
| [16] | 2.5077 | 2.8071 | 3.2462 | 3.9935 | 5.4419 | 8.9945 | 25.1048 |
| Theorem 1 | 1.6222 | 1.8417 | 2.1363 | 2.5992 | 3.4134 | 5.1046 | 10.4056 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Yang, H.; Ivanov, I.G. Reachable Set Estimation and Controller Design for Linear Time-Delayed Control System with Disturbances. Mathematics 2024, 12, 176. https://doi.org/10.3390/math12020176
Jiang Y, Yang H, Ivanov IG. Reachable Set Estimation and Controller Design for Linear Time-Delayed Control System with Disturbances. Mathematics. 2024; 12(2):176. https://doi.org/10.3390/math12020176
Chicago/Turabian StyleJiang, Yongchun, Hongli Yang, and Ivan Ganchev Ivanov. 2024. "Reachable Set Estimation and Controller Design for Linear Time-Delayed Control System with Disturbances" Mathematics 12, no. 2: 176. https://doi.org/10.3390/math12020176
APA StyleJiang, Y., Yang, H., & Ivanov, I. G. (2024). Reachable Set Estimation and Controller Design for Linear Time-Delayed Control System with Disturbances. Mathematics, 12(2), 176. https://doi.org/10.3390/math12020176