1. Introduction
The Orienteering Problem (OP) is a complex NP-hard combinatorial optimization problem [
1]. OP combines elements of the knapsack problem (KP) and the traveling salesman problem (TSP) [
2]. The Team Orienteering Problem (TOP) is a variant of OP inspired by the popular outdoor sport of score orienteering. In this sport, participants use a compass and a map to visit marked points in an orderly manner, with the objective being to visit all points in the shortest time. Score orienteering requires participants to locate some or all points within a specified period, and the winner is the one with the highest score achieved in the least amount of time. Accordingly, OP can be described as finding a path that adheres to constraints, such as time and resources, while maximizing objectives, such as profit and satisfaction.
The goal of the OP is to maximize profit. To achieve this, the solution must include some, or at least one, of the points in the model graph. This necessitates selecting more “valuable” points and arranging them into paths that meet the specific constraints of the problem. Therefore, OP is a path problem focused on single-vehicle profitability. In this context, each customer point has an associated profit. The objective is to determine a single-vehicle route that maximizes the total profit from visited customers without exceeding the maximum time limit.
OP has diverse real-life applications, including courier delivery, ride-hailing services, urban tourism, bicycle sharing, communication network construction, industrial waste collection, salesman travel with time or distance constraints, school shuttle bus route planning, and civil aviation planning. Due to resource limitations, costs, and the high number of customer points, visiting all points is not always feasible. Therefore, the OP is extended to the Set Orienteering Problem (SOP).
Similar to SOP, the Clustered Orienteering Problem (COP) is another profitable path problem. COP requires visiting not just one point from each cluster, but all points within each cluster. The cluster’s profit is collected only when all the cluster customers are visited. This approach can reduce time and costs compared to OP’s application [
3]. As a variation of OP, SOP retains OP’s goal but introduces additional considerations by grouping points into collections. To obtain the profit from a collection, at least one customer from each set must be visited. The problem entails finding a path within a subset of these collections such that: (i) the collected profit is maximized; (ii) the path length is within a specified range; and (iii) the travel time is within a given limit. For instance, when encountering multiple museums or theme parks of similar nature, one can select a few to visit, prioritizing those within the time constraints.
Previous literature has extensively discussed OP, including various articles and survey papers covering different OP variations [
2,
4]. SOP is a variant of OP that involves classifying points into similar groups. This problem can be likened to traveling to a new location and aiming to visit as many different types of tourist attractions as possible within a limited timeframe. Among attractions of the same type, the goal is to select the most convenient one to visit first and then proceed to the next most convenient different type of attraction. For example, starting from a hotel, one might visit the nearest attraction, followed by a temple. The nearest museum, and finally, maximize the visit to special attractions (i.e., maximize profit) within the allowable time while ensuring a timely return to the hotel. In some cases, certain sets must be visited in SOP, resulting in the Set Orienteering Problem with Mandatory Visits (SOPMV). Applications of SOPMV include planning road maintenance activities and designing tourist itineraries. To our knowledge, this problem has not been previously studied. Therefore, this study formulated a mixed integer linear programming (MILP) model for SOPMV and developed a simulated annealing algorithm to address it.
The main contributions of this study are as follows:
- (1)
Development of a MILP model for SOPMV by modifying the existing SOP model;
- (2)
Generation of benchmark problems for SOPMV based on the SOP problem set;
- (3)
Application of a two-phase MILP approach to solving the SOPMV;
- (4)
Utilization of a simulated annealing algorithm to solve the SOPMV;
- (5)
Analysis of the effects of different ratios of mandatory visit sets.
The remainder of this paper is structured as follows. The next section reviews the literature on OP.
Section 3 defines the problem and formulates its MILP model.
Section 4 describes the two-phase MILP and the proposed SA algorithm. In
Section 5, the effectiveness and efficiency of the proposed simulated annealing algorithm are empirically assessed using an existing benchmark problem set, and its performance is compared with that of state-of-the-art algorithms. Finally,
Section 6 presents conclusions and recommendations for future research.
2. Literature Review
OP was first introduced by Tsiligirides [
5], who described it as a variant of orienteering. The author defined orienteering as an outdoor sport where athletes compete to accumulate the most points. In this sport, athletes must navigate a field with designated start and finish points, where different access points are assigned varying point values. The objective is to visit as many points as possible within a specified time and maximize the total points accumulated. This cross-country sport challenges the athletes’ physical endurance and cognitive skills, such as planning ability and sense of direction. Golden [
1] characterized OP as a complex NP-hard problem, noting that developing an exact solution algorithm is highly time-consuming and that heuristic algorithms are essential for solving practical problems. However, Gendreau and Laporte [
6] argued that designing effective heuristic algorithms for OP is challenging. They argued that the vertex score and the time required to reach a vertex are often independent and contradictory and that simple design and refinement of heuristics may not effectively address the problem. Conversely, Gavalas and Konstantopoulos [
7] maintained that OP is a specialized path optimization problem aimed at finding the optimal path under specific constraints to maximize benefits. Unlike other path problems, such as the traveling salesman problem or vehicle route planning, which focuses on minimizing total distance or cost, OP specifically targets profit maximization from selected paths. In OP, only some objective points need to be visited, while in traveling salesman problems and vehicle routing problems, all objective points must be included, and a general mathematical model has been derived.
The extensive research conducted by numerous scholars has significantly broadened the scope of OP studies, integrating various applications and algorithmic solutions [
1,
2,
5,
8,
9,
10,
11]. Vansteenwegen and Souffriau [
2] provided a comprehensive summary of relevant OP research, standardizing and unifying the mathematical descriptions of various OP variants. They reviewed several OP-related problems, including Team Orienteering Problem (TOP), Orienteering Problem with Time Windows (OPTW), and Team Orienteering Problem with Time Windows (TOPTW). Their analysis highlighted the use of heuristic algorithms to address these problems, emphasizing that many real-world issues can be effectively modeled as OP or its variants. In this way, problems can be solved very quickly and efficiently. They anticipate that the OP will increasingly influence tourism planning and other fields.
Researchers have organized and summarized studies on various OP variants, distinguishing between classical and nonclassical OPs [
4]. Classical OPs, such as TOP, OPTW, and TOPTW, have been addressed using algorithms including Strengthened Particle Swarm Optimization (StPSO), Discrete Strengthened Particle Swarm Optimization (DSPSO), Approximation Algorithm (APA), and Approximation Algorithm (AA), such as Multilevel Variable Neighborhood Search (MLVNS), Greedy Randomized Adaptive Search Procedure, and Path Relinking Algorithms. Search Procedure and Path Relinking (GRASPPR), Memetic-Greedy Randomized Adaptive Search Procedure (MGRASP), Robust Branch-Cut-Price Algorithm (Robust Branch-Cut-Price Algorithm (RBCP), Genetic Algorithm (GA), and Memetic Algorithm (MA), which combines some local search techniques, Discrete Particle Swarm Optimization (DPSO), Branch-Cut-Price Algorithm for subset-inequalities, and Pareto Mimic Algorithm (PMA). In contrast, nonclassical OPs include variants such as the (1) Stochastic Orienteering Problem, (2) Generalized Orienteering Problem, (3) Arc Orienteering Problem, (4) Capacitated Team Orienteering Problem, (5) Orienteering Problem with Variable Profits, (6) Clustered Orienteering Problem, (7) Correlated Orienteering Problem, (8) Cooperative Orienteering Problem, (9) Multiagent Orienteering Problem, (10) Multiperiod OP with Multiple Time Windows, and (11) Multiconstraint TOP with Multiple Time Windows.
Gunawan and Lau [
4] summarized these nonclassical OPs and their associated algorithms. They highlighted that solutions for these variants can be approached using methods such as the Branch-Cut-Price Algorithm, Branch-Cut Algorithm, and Tabu Search, Hybrid Greedy Randomized Adaptive Search Procedure, Iterative Operational Search Procedure, Algorithm, Branch-and-Cut Algorithm and Tabu Search, Hybrid Greedy Randomized Adaptive Search Procedure and Iterated Local Search, and Adaptive Large Neighborhood Search. Gunawan and Lau [
4] concluded that further research should focus on cross-country search problem variants involving time-dependent travel times, multiple constraints, and multiple objectives. Developing effective solution algorithms for these challenging variants, combining exact algorithms and heuristic approaches, will be valuable for addressing similar problems in the future.
In a broader sense, different types of OPs vary in how profits are earned. In the classic OP, the profit associated with each point is specific to that point. However, in SOP, the profit can be obtained by reaching any point within a set or by visiting the set as a whole. Thus, SOP aims to maximize profit by covering as many sets as possible within the allowable time. Archetti and Carrabs [
12] argued that SOPs are well-suited for scenarios where products are distributed in bulk, customers belong to different supply chains, and the carrier engages with the supply chain. In SOP, the carrier serves only one customer in each chain, implicitly serving the required quantity. This differs from the COP, where the carriers must serve all retailers within each chain as the contract specifies. Consequently, the SOP allows carriers to offer more competitive prices, as internal distribution among retailers in the chain is managed internally. Thus, SOP provides an alternative distribution strategy compared to COP, benefiting both the operators and the supply chain. Archetti and Carrabs [
12] developed an exact algorithm for SOP, known as the MAtheuristic for the SOP, MASOP, which integrates the mathematical formulations of Tabu Search (TS) and Mixed-Integer Programming (MIP) with mathematical algorithms. Pěnička and Faigl [
13] highlighted that SOP can be more profitable than OP by serving the entire set by visiting just one point within it. Therefore, they [
13] applied a variable neighborhood search algorithm, VNS-SOP to SOP, demonstrating improved performance. Carrabs [
14] proposed a genetic algorithm for solving SOPs using three local search processes to enhance biased random keying for solving chromosome fitness. This algorithm achieved results significantly faster than the algorithms proposed by Archetti, Carrabs [
12], and Pěnička, Faigl [
13] and obtained values very close to those of the other algorithms. Dontas and Sideris [
15] introduced a mathematical algorithm based on local search to solve SOPs, which, through extensive experiments, yielded better results than the leading open-source SOP algorithms of its time. Yu, Salsabila [
16] proposed the Set Team Orienteering Problem with Time Windows (STOPTW), a new variant of the well-known Team Orienteering Problem with Time Windows and Set Orienteering Problem. In the STOPTW, customers are grouped into sets. Each set is associated with a profit when any customer in the sets is visited within the customer’s time window. Dutta and Barma [
17] formulated a multiobjective set-orienteering problem that provides a more realistic representation of real-world scenarios compared to existing models. In this problem, they incorporate two key features: (i) a predefined profit associated with each set of customers and (ii) a preset maximum service time associated with each customer within all the sets.
Palomo-Martínez and Salazar-Aguilar [
18] introduced the orienteering problem with mandatory visits (OP-MV) as a variant of OP. They extend the classical problem by considering mandatory visit points and incorporating constraints related to the exclusion between nodes. Specifically, the OP-MV requires finding a route that visits all mandatory nodes and some optional nodes while ensuring that the total duration does not exceed a pre-specified time limit. The goal is to maximize the total number of points collected. For each optional node, an associated non-negative score is awarded only if that node is visited. Palomo-Martínez and Salazar-Aguilar solved OP-MV using a hybrid variable neighborhood search approach. Using a memetic algorithm, Lu and Benlic [
19] solved the OP with mandatory visits and exclusionary constraints. Lin and Yu [
20] addressed the TOPTW with mandatory visits by employing multistart simulated annealing (MSA).
3. The Problem Definition
The SOPMV can be defined on a directed network
, where
represents the set of nodes, and
represents the set of arcs connecting nodes. Nodes in
N are grouped into set S
k with
k = 1, …,
ns such that
and
,
, where
is the set of sets. A profit
is associated with each set and is collected if and only if at least a node
is visited in the tour. The profit of each set can be collected at most once. As in the MILP of SOP [
12], the objective is to find the tour that maximizes the collected profit. The traveling time
tij required to travel from node
i to
j is known for each pair of nodes
i and
j. The total travel time of a tour should not exceed the given time budget
Tmax.
The following defines the parameters and decision variables:
| n | Number of nodes |
| ns | Number of sets |
| m | Number of sets with mandatory visits |
| M | The set of sets with mandatory visits |
| S | Set of all sets |
| Sk | Set k |
| i, j | Node indices |
| k | Set index |
| pk | Profit of set k |
| Tmax | Time limitation of the tour |
| If a visit to node i is followed by a visit to node j; 0 otherwise |
| If node i is visited; 0 otherwise |
| If set k is visited; 0 otherwise |
| Auxiliary variables used to avoid subtours |
The MILP of SOPMV can be formulated by extending the MILP of SOP [
12] as follows:
The objective function (1) maximizes the total score collected from all paths. Constraint (2) ensures that if the vehicle travels from node
i to node
j, then node
i must be visited. Constraint (3) ensures that if the vehicle travels from node
j to node
i, then node
i must be visited. Constraint (4) mandates that all sets with mandatory visits must be included in the tour. Constraint (5) specifies that a set is considered visited if at least one vertex within that set is visited. Constraint (6) ensures that the duration of each tour does not exceed the specified time limit. Constraints (7) and (8) prevent the formation of subtours. The performance of this formulation of subtour elimination constraints for the Traveling Salesman Problem (TSP) had been evaluated by Öncan, Altınel [
21].
4. The Proposed Algorithms
This study introduces a two-stage MILP and develops a simulated annealing heuristic to address the SOPMV. The following subsections provide a detailed discussion of the two-stage MILP for solving the SOPMV in detail and the proposed SA algorithm. Initially, the presentation of the solution, dynamic programming aspects, initial solutions, and neighborhood solutions for the proposed SA algorithm are described. Subsequently, the related parameters and implementation procedure of the proposed SA algorithm are outlined.
4.1. Two-Phase MILP for Solving SOPMV
The MILP formulation for SOVMV can effectively find the optimal solution for small-scale problems. However, as the problem size increases, finding the optimal solution within a finite time becomes challenging. In some cases, it is even difficult to generate a feasible solution.
This study proposes a two-stage MILP, denotes as MILP*, to solve the SOPMV and address this issue. In the first stage, the MILP only considers sets with mandatory visits. Due to the reduced problem size compared to the original formulation, obtaining an optimal or feasible solution is more manageable. In the second stage, the solution from the first stage is used as an initial solution for the MILP of the full SOPMV. Consequently, the second stage at least guarantees a feasible solution, and it has the potential to yield a better or optimal solution based on the initial solution provided by the first stage.
4.2. Solution Representation of SA
A solution is represented as a string of n numbers that denotes the permutation of sets. The sequence of these numbers indicates the preferred order in which the sets are to be served. The first number in the solution corresponds to the first set to be served, and subsequent sets are added to the tour in the order they appear from left to right, ensuring that the time limit is not exceeded. The specific node to be visited within each served set is determined using dynamic programming, as discussed later.
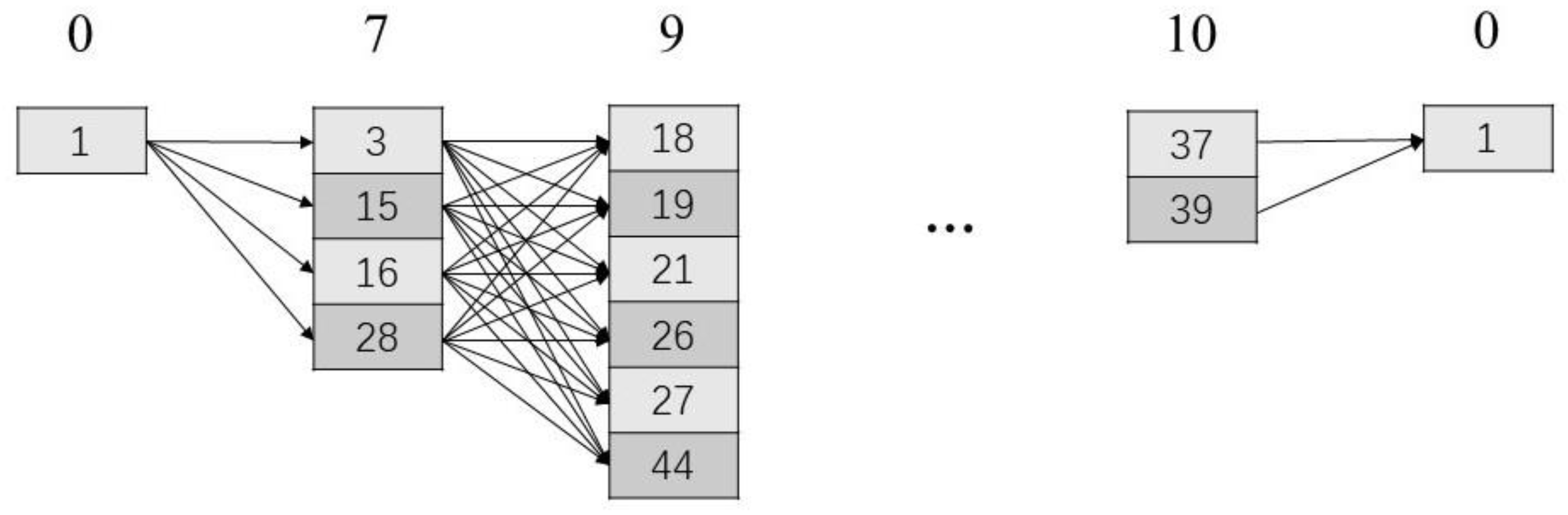
Table 1 presents a small example of a problem with SOPMV with 11 sets (44 nodes). In this example, Set 0 includes Node 1, which is referred to as the deposit. A sample solution for this problem is Π
Given the sequence of set visits, determining which node within each set should be served to achieve the shortest distance path is known as the stagecoach problem, which can be addressed using dynamic programming [
13,
22]. For the given sequence Π
dynamic programming first solves the set visited sequence: 0-7-0. It then solves 0-7-9-0, 0-7-9-4-0, 0-7-9-4-3-0, and 0-7-9-4-3-10-0. While dynamic programming can calculate the traveling distance and identify the visiting node for each served set, it cannot provide a feasible solution for the sequence 0-7-9-4-3-10-5-0; no set can be served following set 10.
Figure 1 illustrates the dynamic programming process for the SOPMV solution example (served set sequence: 0-7-9-4-3-10-0).
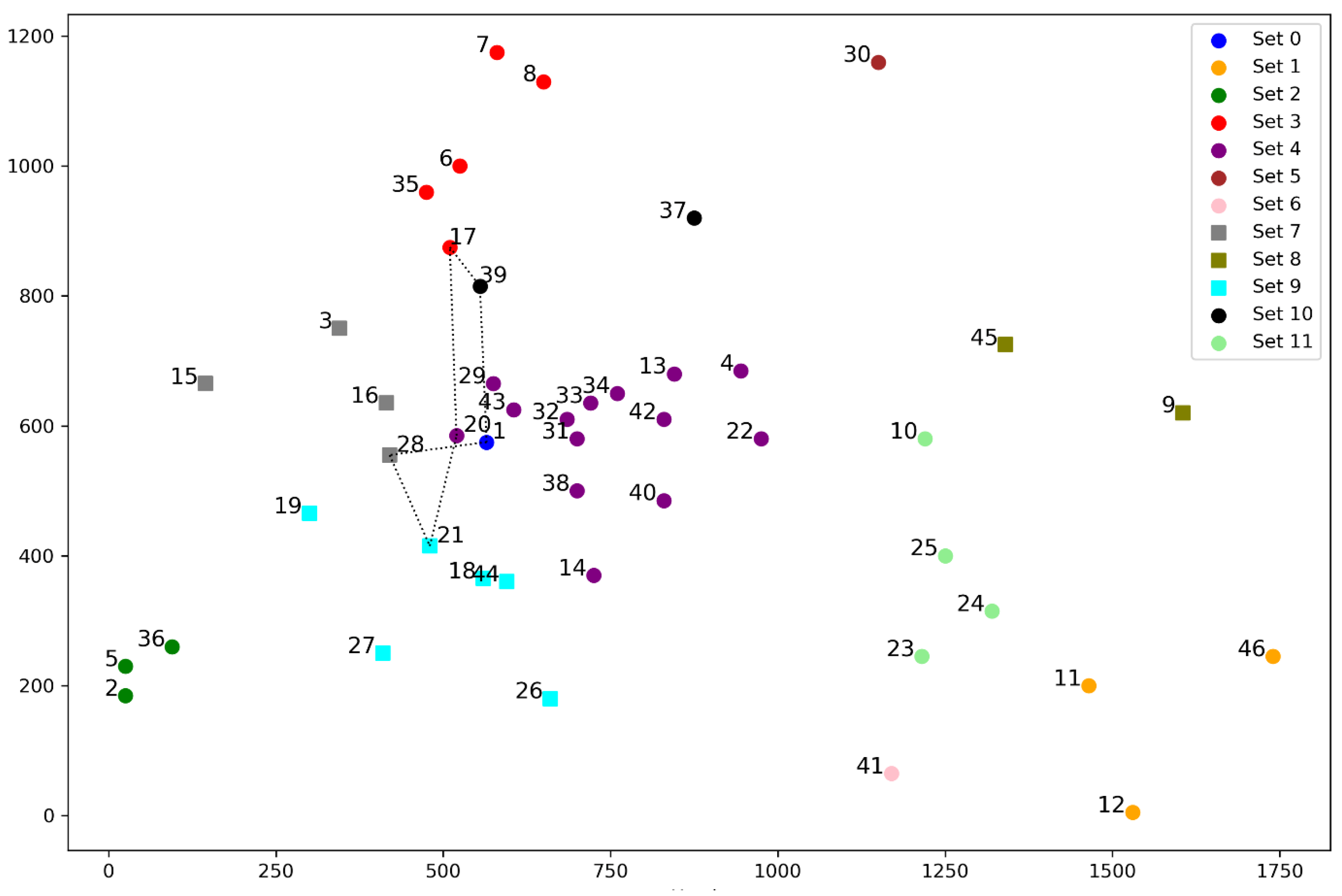
Table 2 lists the visiting nodes for each served set. A visual representation of this solution example is provided in
Figure 2.
4.3. Initial Solution of SA
To obtain a feasible initial solution, all sets with mandatory visits need to be served as much as possible. The initial solution is generated by the following steps.
- (1)
First, add all sets with mandatory visits to the part of the initial solution ( in order of set number;
- (2)
Then, add all other sets (sets without nonmandatory visits) to the in the order of set number, then a full initial solution can be obtained;
- (3)
Exchange two sets with mandatory visits in one by one. If exchanging two sets with mandatory visits will improve the objective function, perform this exchange to obtain new and perform another exchange. This step is performed until the can be improved.
- (4)
Finally, the is output as the initial solution. If any mandatory visit set remains unserved, a penalty of −999 is added to the objective function value of for each unserved mandatory set.
4.4. Neighborhood Solutions of SA
To generate a neighborhood solution from the current solution , three types of random moves are employed: insertion, swapping, and reversal. Each iteration produces a new solution . The insertion move involves randomly selecting an element from and placing it immediately before another randomly chosen element. The swap moves entail randomly selecting two sets and exchanging their positions. The inversion move involves selecting a random subsequence of is selected and reversing its order. Each type of move—insertion, swap, and inversion—is chosen with an equal probability of 1/3. Because the codes for the set with mandatory visits are initially placed at the beginning of the solution representation, the neighborhood solution initially focuses only on changing the order of sets with mandatory visits in the current solution to generate a temporary solution. Once a feasible solution is found, the order of all sets can be adjusted.
4.5. Parameters Used and Procedure of the Proposed SA
The proposed simulated annealing heuristic involves four parameters: , the initial temperature; , the number of iterations at a given temperature; the coefficient that controls the cooling schedule; and the maximal computational time. The algorithm is described in detail as follows.
At the beginning of the proposed SA heuristic, the current temperature (
T) is set to the initial temperature
. After generating a feasible solution
, both the incumbent solution (
) and the best solution (
) are initialized to
. The objective function value of
is calculated as
. If any set with mandatory visits is not served, a penalty of −999 is added to the objective function value. The following loop is executed until the computational time exceeds
At each temperature iteration, a new neighborhood solution
is generated according to the neighborhood search mechanism described in
Section 4.4. Let
represent the difference in objective function values between the new neighborhood solution
and the incumbent solution
, i.e.,
If
, then the new neighborhood solution
will replace the incumbent solution
; otherwise, the new neighborhood solution
will replace the incumbent solution
if a random number
(between 0 and 1) is less than
. If the new solution
in the neighborhood meets these conditions,
is replaced as the incumbent solution
. The current temperature drops to
, 0 <
< 1, after
iterations at the current temperature
T. The best solution (
) and its objective function value (
) are updated whenever a better feasible solution is found. The final best solution is derived from
when the algorithm terminates. Algorithm 1 presents the pseudocode of the proposed SA heuristic for SOPMV, denoted as SA-SOPMV.
| Algorithm 1: The pseudocode of SA-SOPMV |
| | Input: , , , |
| 1 | |
| 2 | Generate an initial solution |
| 3 | |
| 4 | |
| 5 | While ( |
| 6 | For to do |
| 7 | Neighborhood solution of ; |
| 8 | ; |
| 9 | If then |
| 10 | ; |
| 11 | If hen |
| 12 | ; |
| 13 | Else |
| 14 | Random rand ; |
| 15 | If then |
| 16 | ; |
| 17 | |
| 18 | |
| 19 | Return |
6. Conclusions and Future Research
The study introduces a new SOP variant, SOPMV, which incorporates sets with mandatory visits. A mathematical model and an SA algorithm are proposed to address this problem. To evaluate the efficacy of the proposed SA algorithm, a set of SOPMV instances was generated, as this variant has not been previously addressed in the literature.
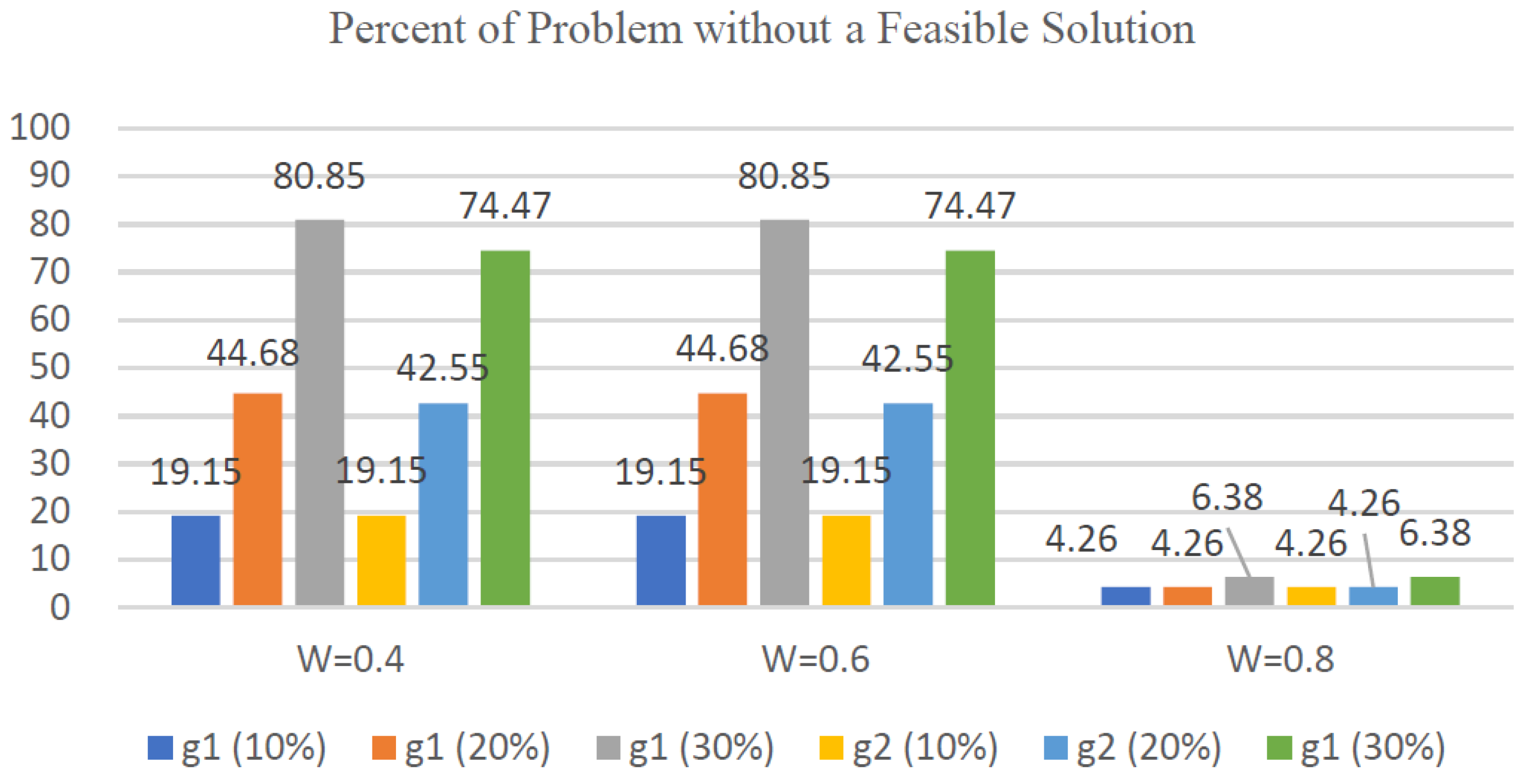
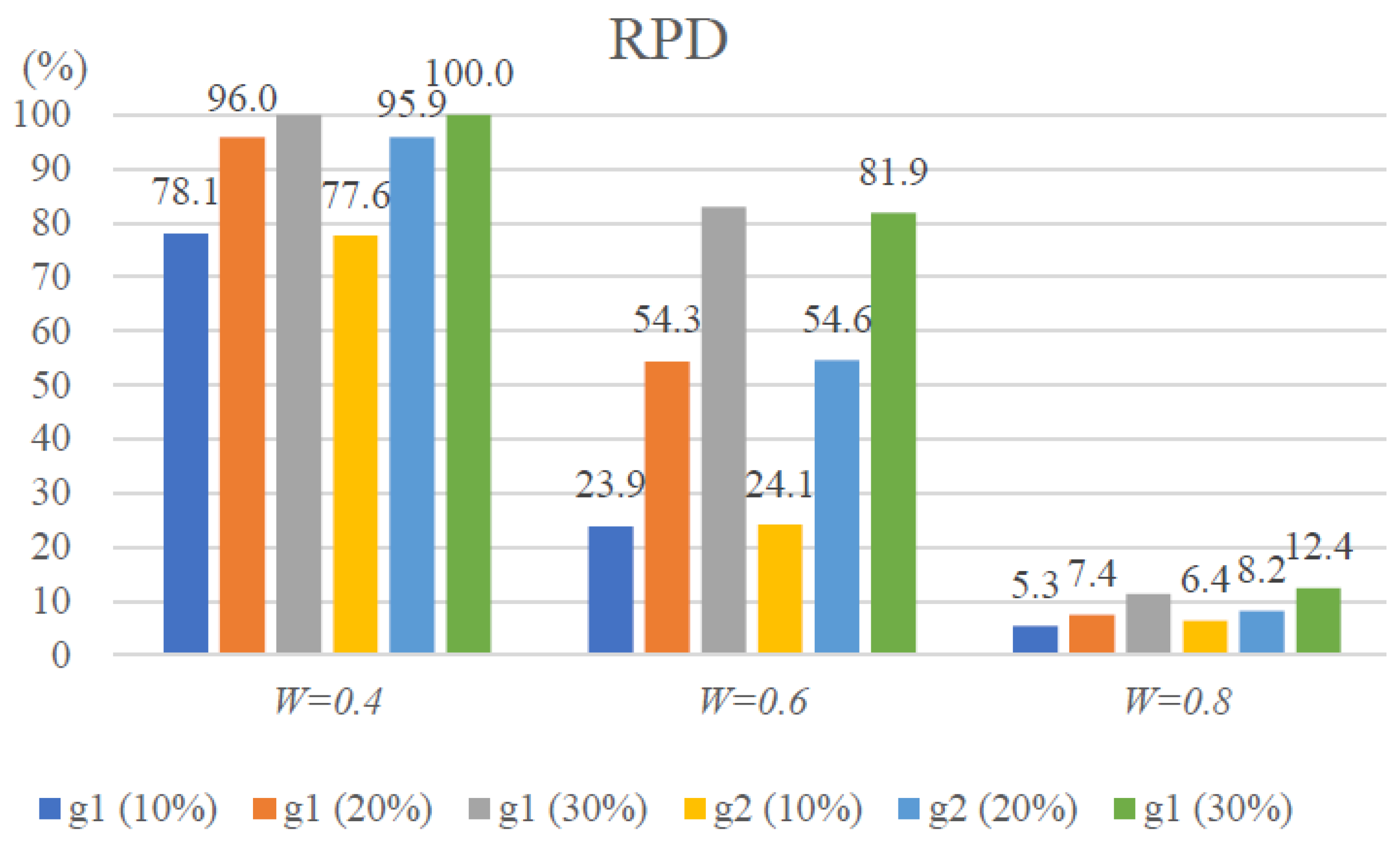
The performance of the proposed SA was analyzed by solving both SOP and SOPMV benchmark instances. Although the computing time required for the proposed SA algorithm is longer than that of VSN-SOP, it successfully obtains all optimal solutions for small-sized problems. For larger problems, while the computing time of the proposed SA is also greater than VNS-SOP, the solutions it provides are either equal to or very close to those obtained by VNS-SOP. The two-phase MILP was also employed to find an optimal or feasible solution for small-scale SOPMV problems. For these small instances, the proposed SA outperforms the two-phase MILP approach, which is solved by the Gurobi solver, with an average RPD of 0.984%, 2.698%, and 4.775% for mandatory visit ratios of 10%, 20%, and 30%, respectively. These results demonstrate that the proposed SA delivers high-quality solutions for SOPMV instances. Furthermore, the findings indicate that the quality of solutions deteriorates as the proportion of mandatory visits increases in large-scale problem instances.
Several avenues for future research are suggested. This study introduces a new problem variant and presents a mathematical model and a SA algorithm to address it. Future work may involve developing new metaheuristic approaches, such as Giant Trevally Optimizer (GTO) [
23] and Artificial Rabbits Optimization (ARO) [
24], for solving the SOPMV or enhancing the quality of solutions by refining the initial solution provided to the SA. Additionally, incorporating time windows into the SOPMV could be explored. Furthermore, future research could address the team-set orienteering problem with mandatory visits (TSOPMV).





{kind=link}
{kind=link}
{kind=link}
{kind=link}