
Command-Filtered Nussbaum Design for Nonlinear Systems with Unknown Control Direction and Input Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- This paper proposes a novel transformation method to eliminate the impact of the input dead zone and saturation on the system, and uses command-filtering technology to solve the problem of complexity explosion in traditional backstepping design.
2. Preliminary Knowledge and Problem Statement
2.1. System Model
2.2. Fuzzy Logic Systems
3. Controller Design and Stability Analysis
3.1. Controller Design
- Step i: : According to the differential rules, the following expression is derived
3.2. Stability Analysis
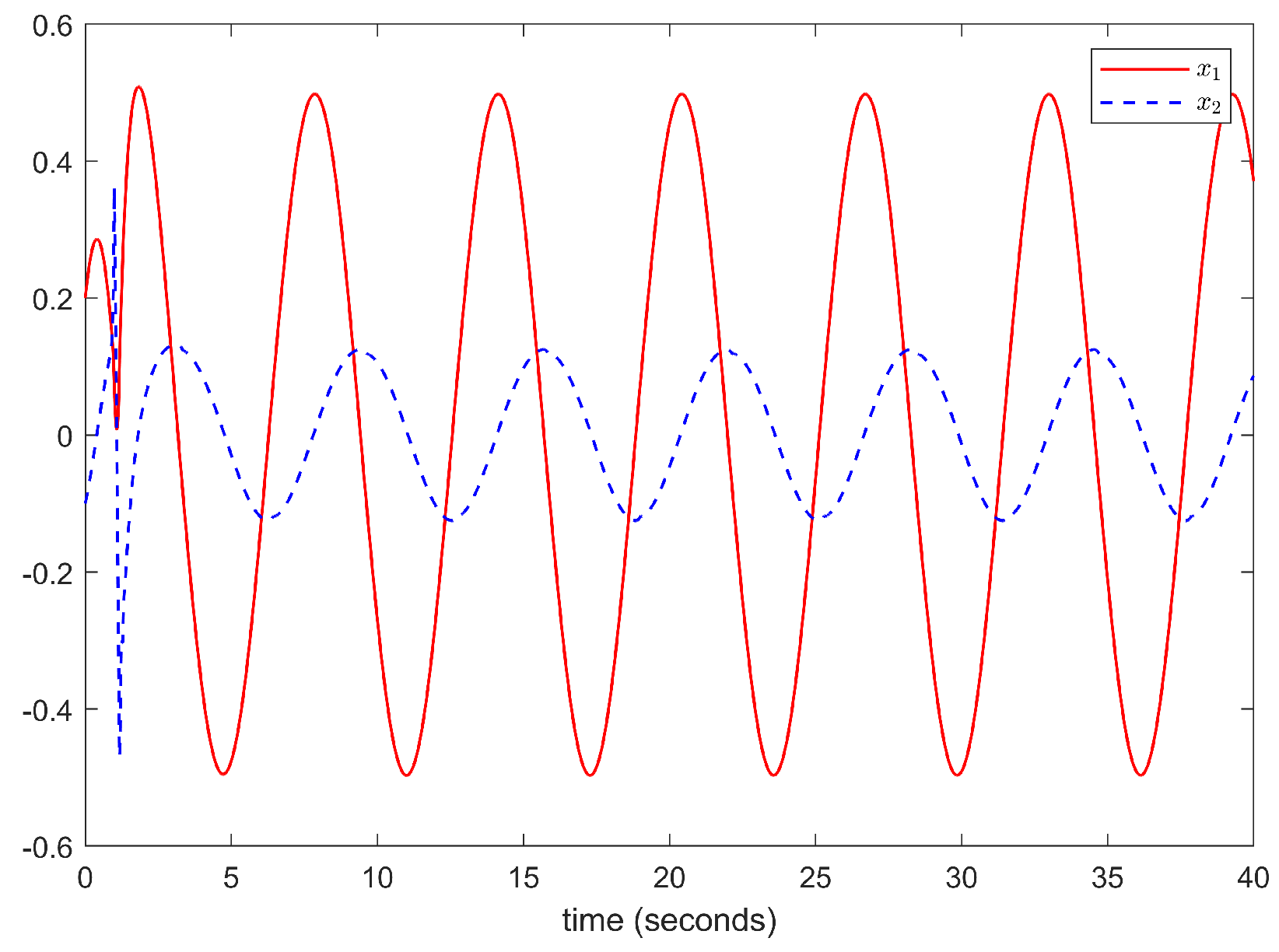
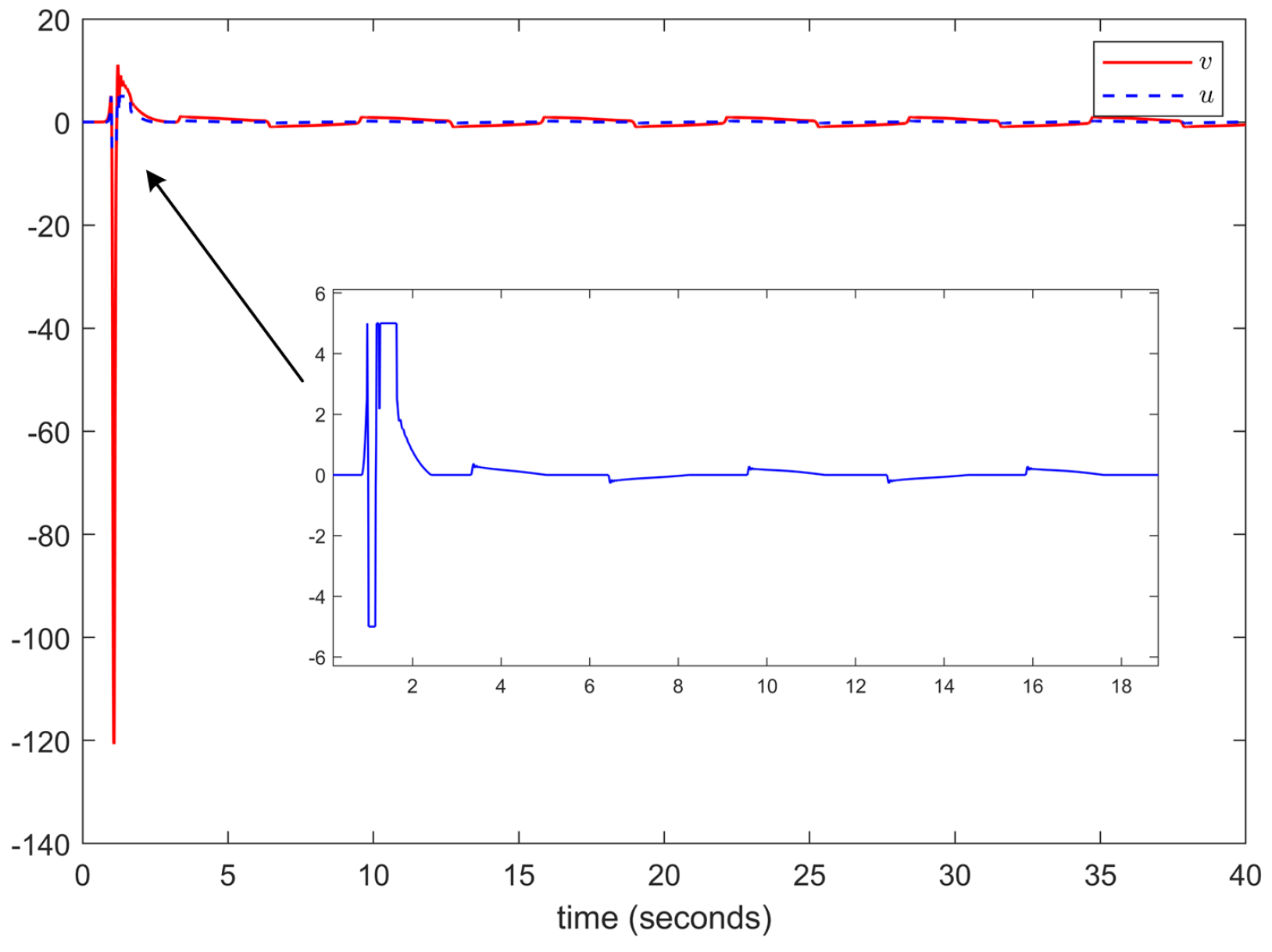
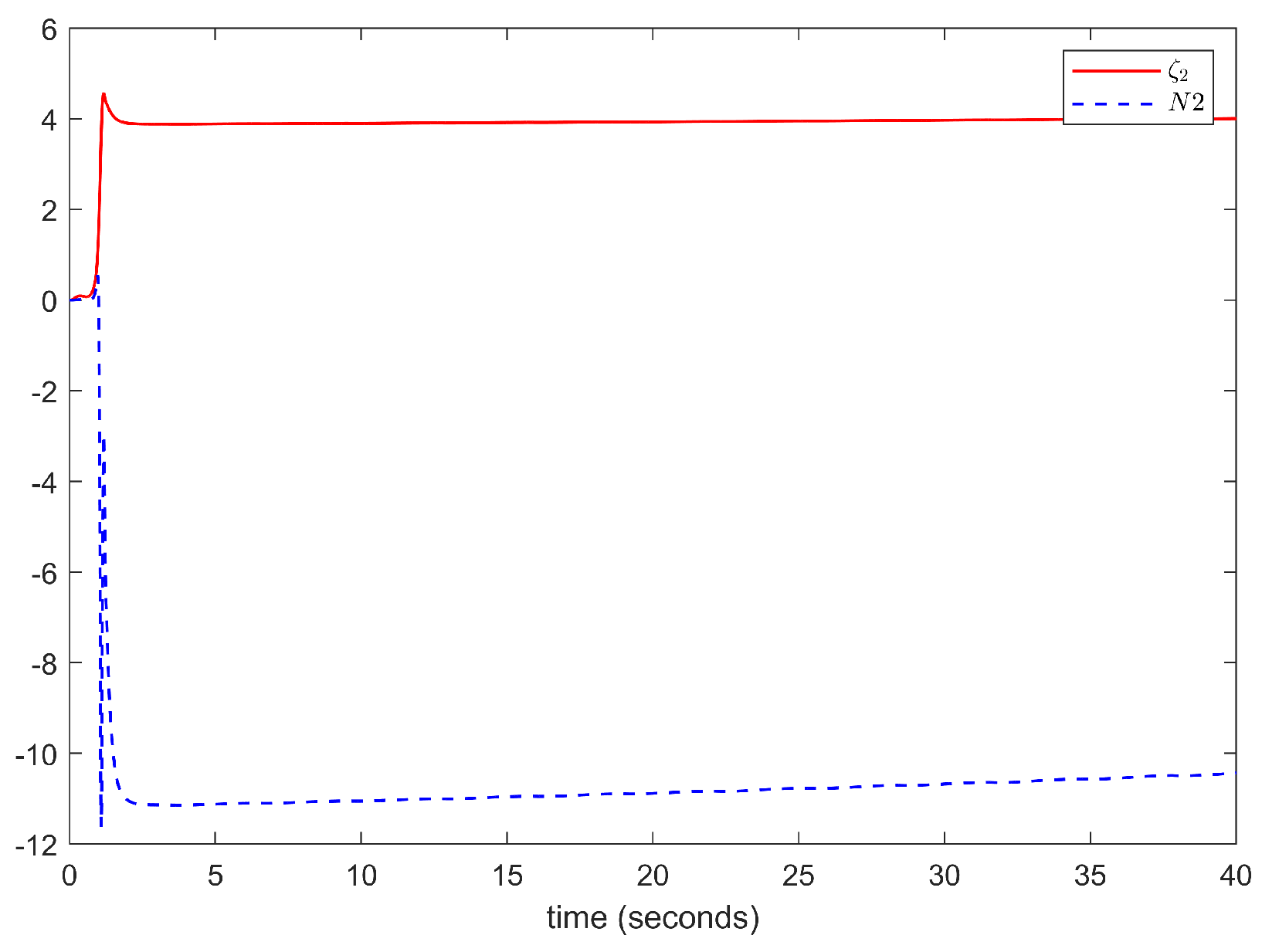
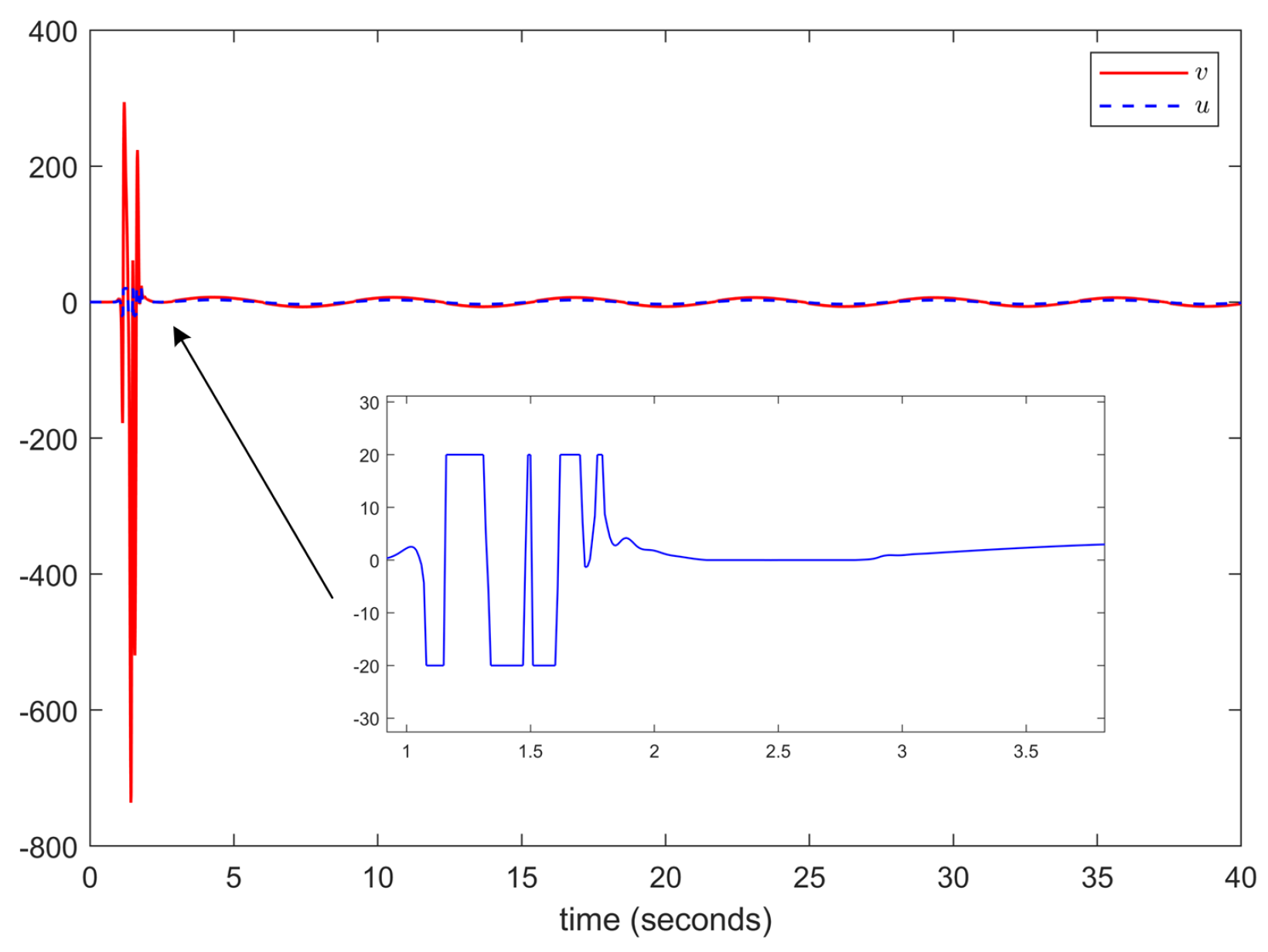
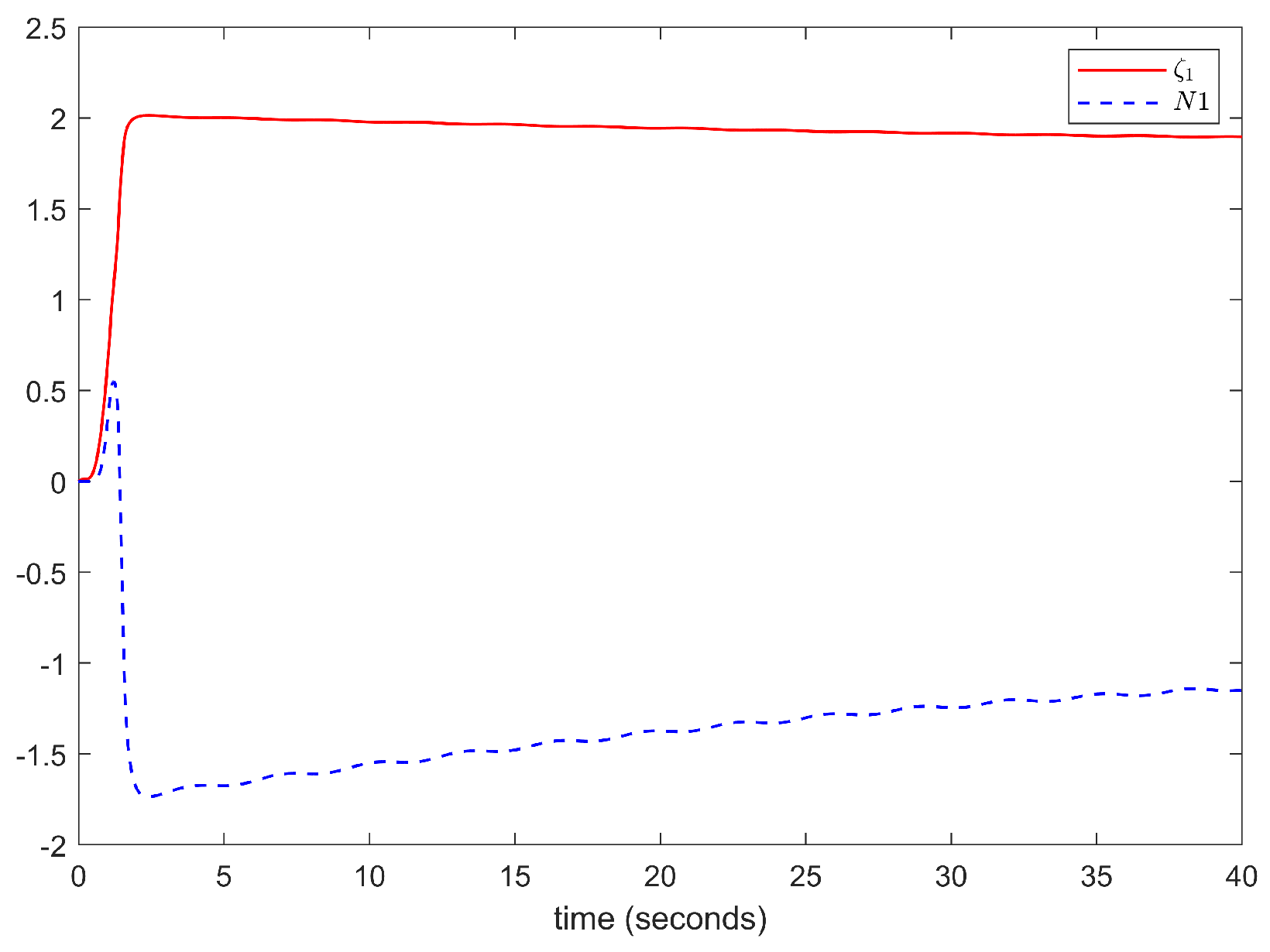
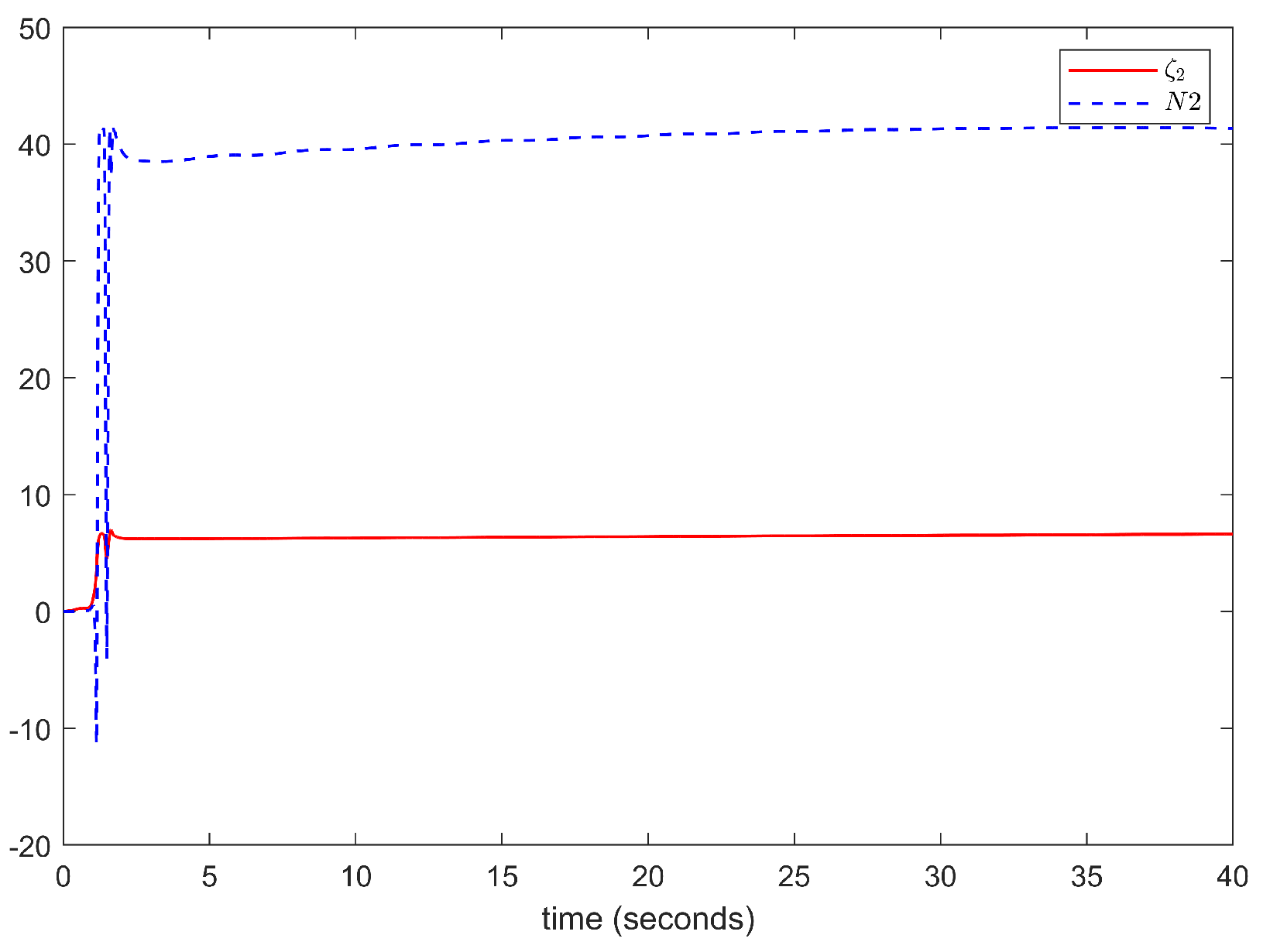
4. Simulation Results
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, H.; Zhu, Q.; Zheng, W.X. Exponential stability of stochastic nonlinear delay systems subject to multiple periodic impulses. IEEE Trans. Autom. Control 2024, 69, 2621–2628. [Google Scholar] [CrossRef]
- Fan, L.; Zhu, Q.; Zheng, W.X. Stability analysis of switched stochastic nonlinear systems with state-dependent delay. IEEE Trans. Autom. Control 2024, 69, 2567–2574. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, Q. Stabilization of stochastic highly nonlinear delay systems with neutral term. IEEE Trans. Autom. Control 2023, 68, 2544–2551. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Nonlinear formation control of unicycle-type mobile robots. Robot. Auton. Syst. 2007, 55, 191–204. [Google Scholar] [CrossRef]
- Merabti, H.; Bouchachi, I.; Belarbi, K. Nonlinear model predictive control of quadcopter. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 208–211. [Google Scholar]
- Geng, X.; Zhan, D.; Zhou, Z. Supervised nonlinear dimensionality reduction for visualization and classification. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2005, 35, 1098–1107. [Google Scholar] [CrossRef]
- Goege, D.; Fuellekrug, U.; Sinapius, M.; Link, M.; Gaul, L. Advanced test strategy for identification and characterization of nonlinearities of aerospace structures. AIAA J. 2005, 43, 974–986. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, W.; Liu, L.; Li, D.; Tong, S.; Chen, C.P. Adaptive neural network control for a class of nonlinear systems with function constraints on states. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 2732–2741. [Google Scholar] [CrossRef]
- Zhang, J.; Niu, B.; Wang, D.; Wang, H.; Duan, P.; Zong, G. Adaptive neural control of nonlinear nonstrict feedback systems with full-state constraints: A novel nonlinear mapping method. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 999–1007. [Google Scholar] [CrossRef]
- Al Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Robust Self-Adaptive Interval Type-2 TS Fuzzy Logic for Controlling Multi-Input–Multi-Output Nonlinear Uncertain Dynamical Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 655–666. [Google Scholar] [CrossRef]
- Park, J.H.; Kim, S.H.; Park, T.S. Output-feedback adaptive neural controller for uncertain pure-feedback nonlinear systems using a high-order sliding mode observer. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 1596–1601. [Google Scholar] [CrossRef]
- Wu, J.; Wu, Z.; Li, J.; Wang, G.; Zhao, H.; Chen, W. Practical adaptive fuzzy control of nonlinear pure-feedback systems with quantized nonlinearity input. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 638–648. [Google Scholar] [CrossRef]
- Li, Y.; Yang, G. Adaptive neural control of pure-feedback nonlinear systems with event-triggered communications. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6242–6251. [Google Scholar] [CrossRef] [PubMed]
- Swaroop, D.; Hedrick, J.K.; Yip, P.P.; Gerdes, J.C. Dynamic surface control for a class of nonlinear systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Zhang, Z.; Wen, C.; Xing, L.; Song, Y. Event-triggered adaptive control for a class of nonlinear systems with mismatched uncertainties via intermittent and faulty output feedback. IEEE Trans. Autom. Control 2023, 68, 8142–8149. [Google Scholar] [CrossRef]
- Huang, S.; Zong, G.; Wang, H.; Zhao, X.; Alharbi, K.H. Command filter-based adaptive fuzzy self-triggered control for MIMO nonlinear systems with time-varying full-state constraints. Int. J. Fuzzy Syst. 2023, 25, 3144–3161. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L.; Zou, W.; Ding, D. Robust adaptive control of uncertain nonlinear systems with unmodeled dynamics using command filter. Int. J. Robust Nonlinear Control 2021, 31, 7764–7784. [Google Scholar] [CrossRef]
- Wang, L.; Wang, H.; Liu, P.X.; Ling, S.; Liu, S. Fuzzy finite-time command filtering output feedback control of nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 30, 97–107. [Google Scholar] [CrossRef]
- Yu, H.; Yu, J.; Wang, Q.; Lin, C. Time-varying BLFs-based adaptive neural network finite-time command-filtered control for nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4696–4704. [Google Scholar] [CrossRef]
- Tian, M.; Tao, G. Adaptive dead-zone compensation for output-feedback canonical systems. Int. J. Control 1997, 67, 791–812. [Google Scholar] [CrossRef]
- Chen, M.; Tao, G. Adaptive fault-tolerant control of uncertain nonlinear large-scale systems with unknown dead zone. IEEE Trans. Cybern. 2015, 46, 1851–1862. [Google Scholar] [CrossRef]
- Kumar, R.; Singh, U.P.; Bali, A.; Raj, K. Hybrid neural network controller for uncertain nonlinear discrete-time systems with non-symmetric dead zone and unknown disturbances. Int. J. Control 2023, 96, 2003–2011. [Google Scholar] [CrossRef]
- Tang, F.; Wang, H.; Zhang, L.; Xu, N.; Ahmad, A.M. Adaptive optimized consensus control for a class of nonlinear multi-agent systems with asymmetric input saturation constraints and hybrid faults. Commun. Nonlinear Sci. Numer. Simul. 2023, 126, 107446. [Google Scholar] [CrossRef]
- Zhao, N.; Tian, Y.; Zhang, H.; Herrera-Viedma, E. Learning-Based Adaptive Fuzzy Output Feedback Control for MIMO Nonlinear Systems With Deception Attacks and Input Saturation. IEEE Trans. Fuzzy Syst. 2024, 32, 2850–2862. [Google Scholar] [CrossRef]
- Wang, H.; Kang, S.; Zhao, X.; Xu, N.; Li, T. Command filter-based adaptive neural control design for nonstrict-feedback nonlinear systems with multiple actuator constraints. IEEE Trans. Cybern. 2021, 52, 12561–12570. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, W.; Ma, B. Finite-time command filtered tracking control for time-varying full state-constrained nonlinear systems with unknown input delay. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4954–4958. [Google Scholar] [CrossRef]
- Xia, J.; Zhang, J.; Feng, J.; Wang, Z.; Zhuang, G. Command filter-based adaptive fuzzy control for nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 1945–1953. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L.; Zou, W.; Ahn, C.K. Novel command-filtered Nussbaum design for continuous-time nonlinear dynamical systems with multiple unknown high-frequency gains. Nonlinear Dyn. 2023, 111, 4313–4323. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, G.; Li, Q.; Ahn, C.K. Multiple adaptive fuzzy Nussbaum-type functions design for stochastic nonlinear systems with fixed-time performance. Fuzzy Sets Syst. 2024, 476, 108767. [Google Scholar] [CrossRef]
- Ye, H.; Zhao, K.; Wu, H.; Song, Y. Adaptive control with global exponential stability for parameter-varying nonlinear systems under unknown control gains. IEEE Trans. Cybern. 2023, 53, 7858–7867. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H. Immersion and invariance based command-filtered adaptive backstepping control of VTOL vehicles. Automatica 2013, 49, 2160–2167. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y. Command-Filtered Nussbaum Design for Nonlinear Systems with Unknown Control Direction and Input Constraints. Mathematics 2024, 12, 2167. https://doi.org/10.3390/math12142167
Liu Y. Command-Filtered Nussbaum Design for Nonlinear Systems with Unknown Control Direction and Input Constraints. Mathematics. 2024; 12(14):2167. https://doi.org/10.3390/math12142167
Chicago/Turabian StyleLiu, Yuxuan. 2024. "Command-Filtered Nussbaum Design for Nonlinear Systems with Unknown Control Direction and Input Constraints" Mathematics 12, no. 14: 2167. https://doi.org/10.3390/math12142167
APA StyleLiu, Y. (2024). Command-Filtered Nussbaum Design for Nonlinear Systems with Unknown Control Direction and Input Constraints. Mathematics, 12(14), 2167. https://doi.org/10.3390/math12142167