
Numerical Resolution of Differential Equations Using the Finite Difference Method in the Real and Complex Domain

 , , ,
, , ,
Abstract
1. Introduction
2. Review of Numerical Finite Difference Operators
3. Review of Finite Difference Equations for Derivative Approximations of a Single Variable
4. Finite Difference Equations for Derivative Approximations with Numeric Operators
5. Finite Difference Coefficients for Complex Variables
6. Second- and Higher-Order Derivatives and Derivatives with Several Variables
7. Testing the Finite Difference Formulas Obtained and Checking the Error Order
8. Approximations of Derivatives Using Complex Finite Differences for Non-Rectangular Grids
9. Comparison of the Real Solution with the Complex One by Finite Differences in the Theory of Disk Elasticity in Compression
- (a)
- add or subtract the indices of the equations by any value, shifting the indices, which is useful at the border of the geometric domain of the mesh,
- (b)
- use the formulas obtained for total and partial derivatives,
- (c)
- swap the variable with respect to the derivative,
- (d)
- change the orders of the variables of the partial derivatives, changing the indices of equations,
- (e)
- obtain the backward equations based on the forward equations, and vice versa,
- (f)
- with symmetry in the finite difference coefficients of different quadrants, considering the formula of quadrant 1, one can obtain that of quadrants 2, 3, and 4,
- (g)
- observe the symmetry of the numerator coefficients of centered equations.
- (1)
- (2)
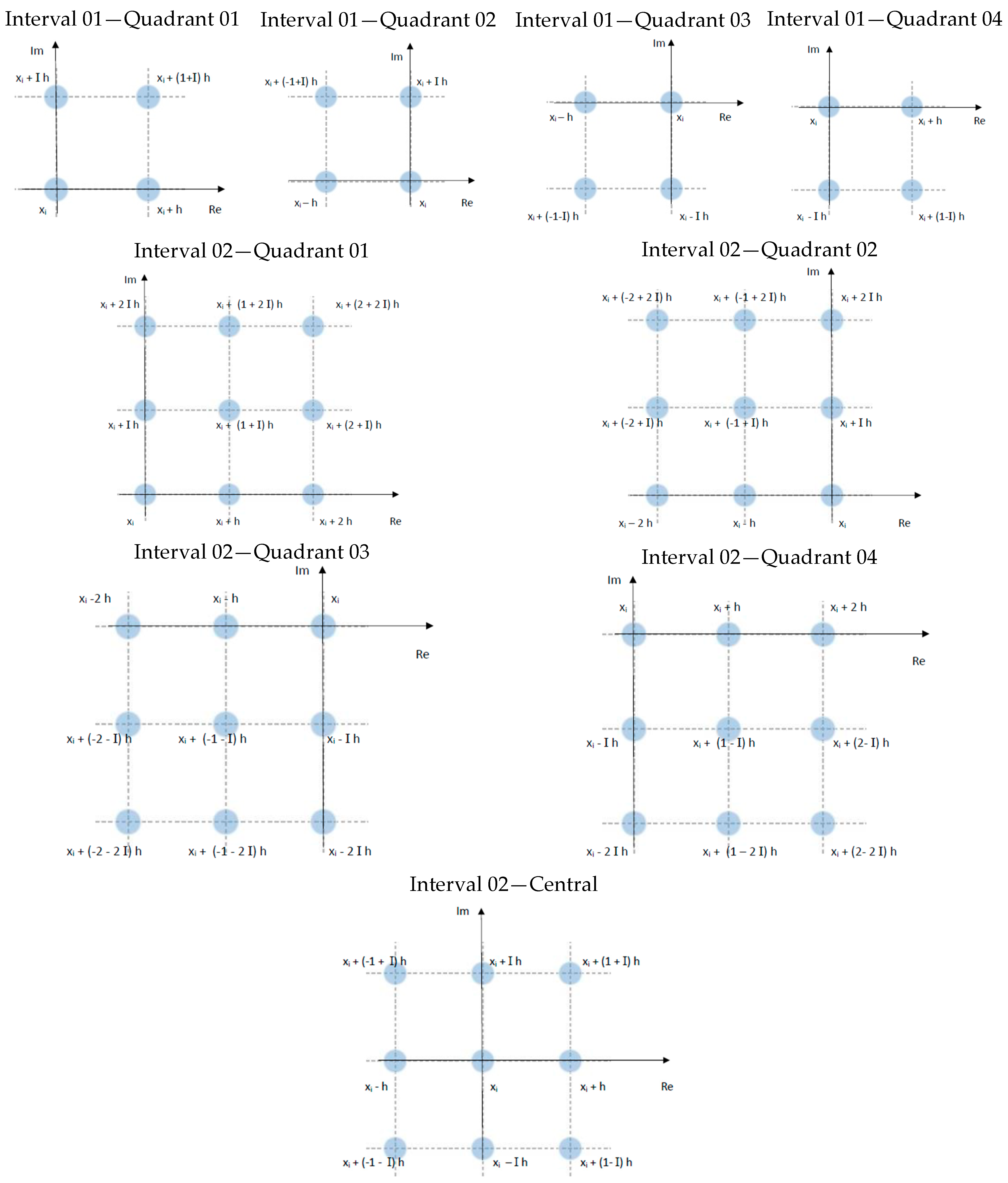
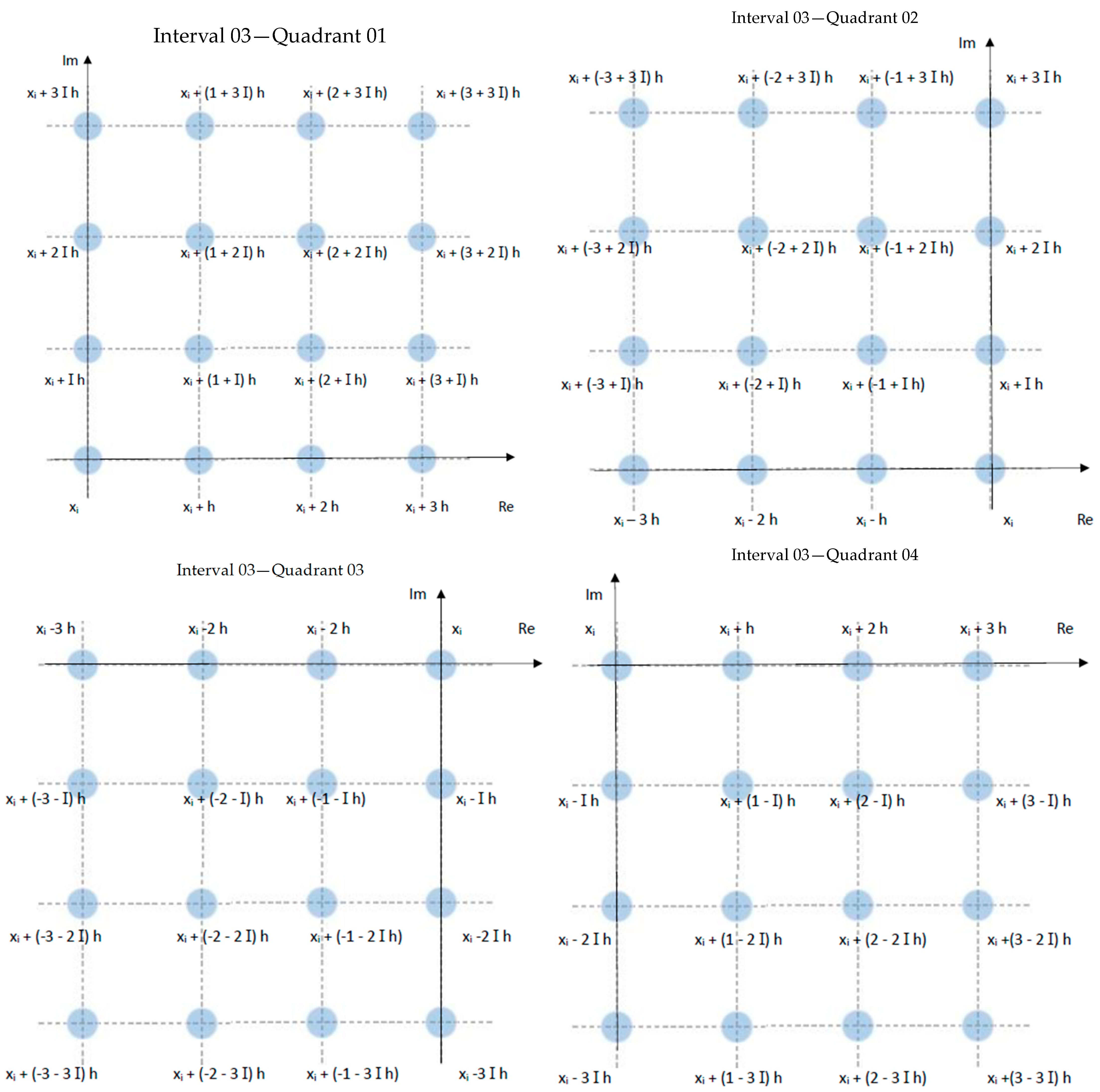
- Define whether to use equations from the first, second, third, or fourth quadrants or central equations, thus having the discrete points of the finite difference formulas (depending on the need in the problem mesh).
- (3)
- Assemble the complex linear system using Taylor series (Equations (3)–(6)).
- (4)
- Solve the complex linear system and obtain approximations for the first derivative (Equations (11) and (12)).
- (5)
- Write the first derivative approximations obtained in terms of the Shift operator E, with complex powers (Section 6).
- (6)
- Define the derivative that must be calculated with the number of independent complex and real variables and the order of the derivative of each variable (depending on the differential equation to be solved).
- (7)
- (8)
- Perform an algebraic test of the formula obtained (Section 7).
- (9)
- Use the finite difference formula obtained in the practical example.
- (10)
- Apply the finite difference approximation with increasingly smaller increment steps until obtaining the desired precision and accuracy.
10. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Tables of Approximations of Derivatives by Finite Difference Equations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) (b) |
| (e) |
| |
| (h) (i) |
| (k) (l) |
| (m) (n) (o) |
| (a) |
(e) |
| (f) |
| (h) (i) (j) |
| |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (a) xi + .h c = |
| (b) xi + .h c = |
| (c) xi + .h c = |
| (d) xi + .h c = |
| (e) xi + .h c = |
| (a) |
| |
| (a) (e) |
(h) (i) (j) |
| |
Appendix B. Figures with Approximations of Derivatives by Finite Difference Equations



References
- Hoffman, J.D.; Hoffman, J.D.; Frankel, S. Numerical Methods for Engineers and Scientists; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Steven, C.C. Applied Numercial Methods with MATLAB for Engineers and Scientist; McGraw Hill: New York, NY, USA, 2013; Volume 53. [Google Scholar]
- Chapra, S.C.; Canale, R.P. Numerical Methods for Engineers, 2nd ed.; New Age International: New Delhi, India, 2006. [Google Scholar]
- Nayak, G.C. Applied Numerical Methods, B. Carnahan, H.A. Lither and J. O. Wilkes, Wiley, New York, 1969. No. of Pages: 604. Price: £6·60. Int. J. Numer. Methods Eng. 1972, 4, 599–600. [Google Scholar] [CrossRef]
- Seiler, M.C.; Seiler, F.A. Numerical Recipes in C: The Art of Scientific Computing. Risk Anal. 1989, 9, 415–416. [Google Scholar] [CrossRef]
- Dukkipati, R.V. Numerical Methods; Courier Corporation: New Delhi, India, 2010. [Google Scholar]
- Chapra, S.C. Métodos Numéricos Para Ingenieros; McGraw Hill: New York, NY, USA, 2011. [Google Scholar]
- Chen, Q.; Wang, P.; Zhu, D. A Second-Order Finite-Difference Method for Derivative-Free Optimization. J. Math. 2024, 2024, 1947996. [Google Scholar] [CrossRef]
- Chelnokov, Y.N. Quaternion Methods and Models of Regular Celestial Mechanics and Astrodynamics. Appl. Math. Mech. 2022, 43, 21–80. [Google Scholar] [CrossRef]
- Roberts, J.L. A Method for Calculating Meshless Finite Difference Weights. Int. J. Numer. Methods Eng. 2008, 74. [Google Scholar] [CrossRef]
- Khan, I.R.; Ohba, R. Closed-Form Expressions for the Finite Difference Approximations of First and Higher Derivatives Based on Taylor Series. J. Comput. Appl. Math. 1999, 107, 179–193, Corrigendum in J. Comput. Appl. Math. 2001, 130, 385. [Google Scholar] [CrossRef]
- Khan, I.R.; Ohba, R.; Hozumi, N. Mathematical Proof of Closed Form Expressions for Finite Difference Approximations Based on Taylor Series. J. Comput. Appl. Math. 2003, 150, 303–309. [Google Scholar] [CrossRef]
- Khan, I.R.; Ohba, R. Taylor Series Based Finite Difference Approximations of Higher-Degree Derivatives. J. Comput. Appl. Math. 2003, 154, 115–124. [Google Scholar] [CrossRef]
- Khan, I.R.; Ohba, R. New Finite Difference Formulas for Numerical Differentiation. J. Comput. Appl. Math. 2000, 126, 269–276. [Google Scholar] [CrossRef]
- Li, J. General Explicit Difference Formulas for Numerical Differentiation. J. Comput. Appl. Math. 2005, 183, 29–52. [Google Scholar] [CrossRef]
- Feagin, T. High-Order Explicit Runge-Kutta Methods Using m-Symmetry. Neural Parallel Sci. Comput. 2012, 20, 437–458. [Google Scholar]
- Fornberg, B. Infinite-Order Accuracy Limit of Finite Difference Formulas in the Complex Plane. IMA J. Numer. Anal. 2023, 43, 3055–3072. [Google Scholar] [CrossRef]
- Fornberg, B.; Piret, C. Computation of Fractional Derivatives of Analytic Functions. J. Sci. Comput. 2023, 96, 79. [Google Scholar] [CrossRef]
- Fornberg, B. Finite Difference Formulas in the Complex Plane. Numer. Algorithms 2022, 90, 1305–1326. [Google Scholar] [CrossRef]
- Abrahamsen, D.; Fornberg, B. Solving the Korteweg-de Vries Equation with Hermite-Based Finite Differences. Appl. Math. Comput. 2021, 401, 126101. [Google Scholar] [CrossRef]
- Li, T.; Wang, Q.W. Structure Preserving Quaternion Full Orthogonalization Method with Applications. Numer. Linear Algebra Appl. 2023, 30, e2495. [Google Scholar] [CrossRef]
- SEM. Handbook on Experimental Mechanics. Exp. Tech. 1989, 13, 21. [Google Scholar] [CrossRef]
- Tokovyy, Y.V.; Hung, K.M.; Ma, C.C. Determination of Stresses and Displacements in a Thin Annular Disk Subjected to Diametral Compression. J. Math. Sci. 2010, 165, 342–354. [Google Scholar] [CrossRef]
- Markides, C.F.; Kourkoulis, S.K. Stresses and Displacements in an Elliptically Perforated Circular Disc under Radial Pressure. Eng. Trans. 2014, 62, 131–169. [Google Scholar]
- Vasil’ev, V.V.; Fedorov, L.V. Stress functions in elasticity theory. Mech. Solids 2022, 57, 770–778. [Google Scholar] [CrossRef]
- Sadd, M.H. Elasticity: Theory, Applications, and Numerics; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Jiang, Y.; Pu, C. The Problem of I–II Combined Plane Crack Solved with Westergaard Stress Function. Mech. Eng. 2020, 42, 504–507. [Google Scholar] [CrossRef]
- Dumont, N.A.; Mamani, E.Y. Generalized Westergaard Stress Functions as Fundamental Solutions. CMES Comput. Model. Eng. Sci. 2011, 78, 109–149. [Google Scholar]
- Sun, C.T.; Farris, T.N. On the Completeness of the Westergaard Stress Functions. Int. J. Fract. 1989, 40, 73–77. [Google Scholar] [CrossRef]
- Leven, M.M. Discussion: “A New Method to ‘Lock-In’ Elastic Effects for Experimental Stress Analysis” (Dally, J.W., Durelli, A.J., and Riley, W.F., 1958, ASME J. Appl. Mech., 25, Pp. 189–195). J. Appl. Mech. 1959, 26, 152. [Google Scholar] [CrossRef]
- Clough, D.E.; Chapra, S.C. Introduction to Engineering and Scientific Computing with Python; Informa UK Limited: London, UK, 2022. [Google Scholar] [CrossRef]
- Magalhães, P.A.A. New Equations for Phase Evaluation in Measurements with an Arbitrary but Constant Phase Shift between Captured Intensity Signs. Opt. Eng. 2009, 48, 113602. [Google Scholar] [CrossRef]
- Cunha, P.P.S.R.; da Souza, P.M.; Valente, L.C.; Mello, G.M.V.; de Junior, P.A.A.M. Analysis of Induced Drag and Vortex at the Wing Tip of a Blended Wing Body Aircraft. Int. J. Adv. Eng. Res. Sci. 2018, 5, 7–9. [Google Scholar] [CrossRef]
- Magalhaes, P.A.A.; Magalhaes, C.A. Higher-Order Newton-Cotes Formulas. J. Math. Stat. 2010, 6, 193–204. [Google Scholar] [CrossRef]
- Almeida Magalhaes, C.; Americo Almeida Magalhaes, P. New Numerical Methods for the Photoelastic Technique with High Accuracy. J. Appl. Phys. 2012, 112, 083111. [Google Scholar] [CrossRef]
- Lamon, G.P.S.; Magalhães Júnior, P.A.A.; Carneiro, J.R.G. Cole type Pitot tube, discharge factor survey and calibration. Meas. Sens. 2024, 33, 101152. [Google Scholar] [CrossRef]
- López-Pérez, A.; Febrero-Bande, M.; González-Manteiga, W. Parametric estimation of diffusion processes: A review and comparative study. Mathematics 2021, 9, 859. [Google Scholar] [CrossRef]
- Berdyshev, A.; Baigereyev, D.; Boranbek, K. Numerical Method for Fractional-Order Generalization of the Stochastic Stokes–Darcy Model. Mathematics 2023, 11, 3763. [Google Scholar] [CrossRef]
- Pekmen Geridonmez, B.P.; Oztop, H.F. Entropy Generation Due to Magneto-Convection of a Hybrid Nanofluid in the Presence of a Wavy Conducting Wall. Mathematics 2022, 10, 4663. [Google Scholar] [CrossRef]
- Sun, J.; Wang, L.; Gong, D. A Joint Optimization Algorithm Based on the Optimal Shape Parameter–Gaussian Radial Basis Function Surrogate Model and Its Application. Mathematics 2023, 11, 3169. [Google Scholar] [CrossRef]
- Alahmadi, R.A.; Raza, J.; Mushtaq, T.; Abdelmohsen, S.A.M.; RGorji, M.; Hassan, A.M. Optimization of MHD Flow of Radiative Micropolar Nanofluid in a Channel by RSM: Sensitivity Analysis. Mathematics 2023, 11, 939. [Google Scholar] [CrossRef]




| Operator | Symbol | Definition |
|---|---|---|
| Shift | E | Eu(xi) = u(xi+1) or Eyi = yi+1 |
| Forward difference | Δ | Δu(xi) = u(xi+1) − u(xi) or Δyi = yi+1 − yi or Δ = E − 1 |
| Backward difference | ∇ | ∇u(xi) = u(xi) − u(xi−1) or ∇yi = yi − yi−1 or ∇ = 1 − E−1 |
| Central difference | δ | δu(xi) = u(xi+½) − u(xi−½) or δyi = yi+½ − yi−½ or δ = E1/2 − E−1/2 |
| Average | μ | μu(xi) = (½)[ u(xi+½) + u(xi−½) ] or μyi = (½)(yi+½ + yi−½ ) or μ = (½)(E½ + E−½ ) |
| Average central difference | μδ | μδu(xi) = (½)[ u(xi+1) − u(xi−1) ] or μδyi = (½)(yi+1 − yi−1) or μδ = (½)(E1 − E−1) |
| Operator | Symbol | Successive Application |
|---|---|---|
| Shift | E | Enu(xi) = u(xi+n) or Enyi = yi+n or En = E(E(E(….E))) |
| Forward difference | Δ | Δnu(xi) = Δn−1u(xi+1) − Δn−1u(xi) or Δnyi = Δn−1yi+1 − Δn−1yi or Δn = Δ(Δ(Δ(….Δ))) |
| Backward difference | ∇ | ∇nu(xi) = ∇n−1u(xi) − ∇n−1u(xi−1) or ∇nyi = ∇n−1yi − ∇n−1yi−1 or ∇n = ∇(∇(∇(….∇))) |
| Central difference | δ | δnu(xi) = δn−1u(xi+½) − δn−1u(xi−½) or δnyi = δn−1yi+½ − δn−1yi−½ or δ n = δ(δ(δ(….δ))) δ2u(xi) = δu(xi+½) − δu(xi−½) = [u(xi+½+½) − u(xi+½−½)] − [u(xi−½+½) − u(xi−½−½)] = [u(xi+1) − u(xi)] − [u(xi) − u(xi−1)] = u(xi+1) − u(xi) − u(xi) + u(xi−1) = u(xi+1) − 2 u(xi) + u(xi−1) δ2u(xi) = u(xi+1) − 2 u(xi) + u(xi−1) or δ2yi = yi+1 − 2 yi + yi−1 δ4u(xi) = δ2u(xi+1) − 2 δ2u(xi) + δ2u(xi−1) or δ2yi = δ2yi+1 − 2 δ2yi + δ2yi−1 δnu(xi) = δn−2u(xi+1) − 2δn−2u(xi) + δn−2u(xi−1) or δnyi = δn−2yi+1 − 2δn−2yi + δn−2yi−1 |
| Average central difference | μδ | μδnu(xi) = (½) [δn−1u(xi+½) − δn−1u(xi−½)] or μδnyi = (½) (δn−1yi+½ − δn−1yi−½ ) or μδn = μδ(δ(δ(….δ))) μδu(xi) = (½) [u(xi+1) − u(xi−1) ] or μδyi = (½)(yi+1 − yi−1) μδ3u(xi) = (½) [δ2u(xi+1) − δ2u(xi−1)] or μδ3yi = (½)(δ2yi+1 − δ2yi−1) μδnu(xi) = (½) [ δn−1u(xi+1) − δn−1u(xi−1)] or μδnyi = (½)(δn−1yi+1 − δn−1yi−1) |
| Step or Increment of Cartesian Coordinates x and y—Δx or Δy (m) | Step or Increment of Polar Coordinates Radial Distance—Δr (m) | Step or Increment of Polar Coordinates Polar Angle—Δθ (rad) | Average Stresses Error between the Exact Value and the Real Solution Due to Finite Differences at the Mesh Nodes—σ or τ (Pa) | Average Stresses Error between the Exact Value and the Complex Solution Due to Finite Differences at the Mesh Nodes—σ or τ (Pa) |
|---|---|---|---|---|
| h = 0.1 | 0.14142 | 0.07854 | 0.02805 | 0.006871 |
| h = 0.01 | 0.014142 | 0.007854 | 2.4463 × 10−6 | 5.8212 × 10−11 |
| h = 0.001 | 0.0014142 | 0.0007854 | 7.7650 × 10−10 | 8.5163 × 10−19 |
| h = 10−4 | 1.14142 × 10−4 | 7.854 × 10−5 | 1.5339 × 10−14 | 1.2798 × 10−27 |
| h = 10−5 | 1.14142 × 10−5 | 7.854 × 10−6 | 7.4519 × 10−18 | 6.7628 × 10−35 |
| h = 10−6 | 1.14142 × 10−6 | 7.854 × 10−7 | 1.7867 × 10−22 | 8.6599 × 10−43 |
| Grid or Set of Points of the Main Stencil Used in the Numerical Resolution of the Stress Calculation Problem: | Average Stresses Error between the Exact Value and the Complex Solution Due to Finite Differences at the Mesh Nodes with Step of Cartesian Coordinates x and y Equal to: | ||||
|---|---|---|---|---|---|
| h = 0.1 | h = 0.01 | h = 0.001 | h = 10−4 | h = 10−5 | |
| Square with Interval 01—Quadrant 01—Table A4a | 2.04 × 102 | 6.83 × 10−1 | 9.59 × 10−4 | 4.50 × 10−7 | 9.74 × 10−10 |
| Square with Interval 01—Quadrant 02—Table A5a | 3.88 × 102 | 8.91 × 10−1 | 7.38 × 10−4 | 1.75 × 10−8 | 2.48 × 10−10 |
| Square with Interval 01—Quadrant 03—Table A6a | 3.88 × 102 | 3.36 × 10−1 | 6.95 × 10−4 | 4.28 × 10−7 | 1.29 × 10−10 |
| Square with Interval 01—Quadrant 04—Table A7a | 2.27 × 10 | 1.26 × 10−1 | 1.40 × 10−4 | 4.74 × 10−7 | 1.38 × 10−10 |
| Square with Interval 02—Quadrant 01—Table A4b | 3.81 × 10−3 | 3.37 × 10−11 | 4.86 × 10−20 | 5.67 × 10−27 | 7.91 × 10−35 |
| Square with Interval 02—Quadrant 02—Table A5b | 3.17 × 10−3 | 7.21 × 10−11 | 6.76 × 10−19 | 7.29 × 10−27 | 4.08 × 10−35 |
| Square with Interval 02—Quadrant 03—Table A6b | 8.40 × 10−3 | 3.19 × 10−11 | 6.46 × 10−19 | 5.17 × 10−27 | 2.78 × 10−35 |
| Square with Interval 02—Quadrant 04—Table A7b | 7.78 × 10−3 | 6.94 × 10−11 | 4.22 × 10−19 | 2.95 × 10−27 | 7.70 × 10−35 |
| Square with Interval 02—Central—Table A8a | 3.74 × 10−3 | 4.45 × 10−11 | 3.00 × 10−19 | 3.47 × 10−27 | 1.45 × 10−35 |
| Square with Interval 03—Quadrant 01—Table A4c | 5.93× 10−10 | 4.49 × 10−25 | 7.82 × 10−40 | 4.18 × 10−55 | 3.33 × 10−71 |
| Square with Interval 03—Quadrant 02—Table A5c | 9.28 × 10−10 | 4.63 × 10−25 | 2.67 × 10−40 | 6.06 × 10−55 | 8.83 × 10−70 |
| Square with Interval 03—Quadrant 03—Table A6c | 8.08× 10−10 | 4.49 × 10−25 | 1.47 × 10−40 | 6.56 × 10−57 | 3.80 × 10−70 |
| Square with Interval 03—Quadrant 04—Table A7c | 9.42 × 10−10 | 5.81 × 10−25 | 2.63 × 10−40 | 7.71 × 10−55 | 2.56 × 10−70 |
| Square with Interval 04—Quadrant 01—Table A4d | 2.85 × 10−19 | 4.90 × 10−43 | 3.28 × 10−67 | 3.87 × 10−93 | 9.37 × 10−115 |
| Square with Interval 04—Quadrant 02—Table A5d | 2.55 × 10−19 | 2.25 × 10−43 | 6.99 × 10−69 | 4.82 × 10−91 | 7.77 × 10−115 |
| Square with Interval 04—Quadrant 03—Table A6d | 5.51 × 10−19 | 5.93 × 10−43 | 2.88 × 10−67 | 6.04 × 10−91 | 3.07 × 10−115 |
| Square with Interval 04—Quadrant 04—Table A7d | 4.76 × 10−19 | 2.18 × 10−43 | 5.04 × 10−67 | 9.71 × 10−92 | 3.72 × 10−115 |
| Square with Interval 04—Central—Table A8b | 4.61 × 10−19 | 1.73 × 10−43 | 2.84 × 10−67 | 6.20 × 10−92 | 1.63 × 10−116 |
| Square with Interval 06—Central—Table A8c | 3.24 × 10−43 | 8.05 × 10−92 | 2.40 × 10−140 | 2.89 × 10−187 | 4.55 × 10−235 |
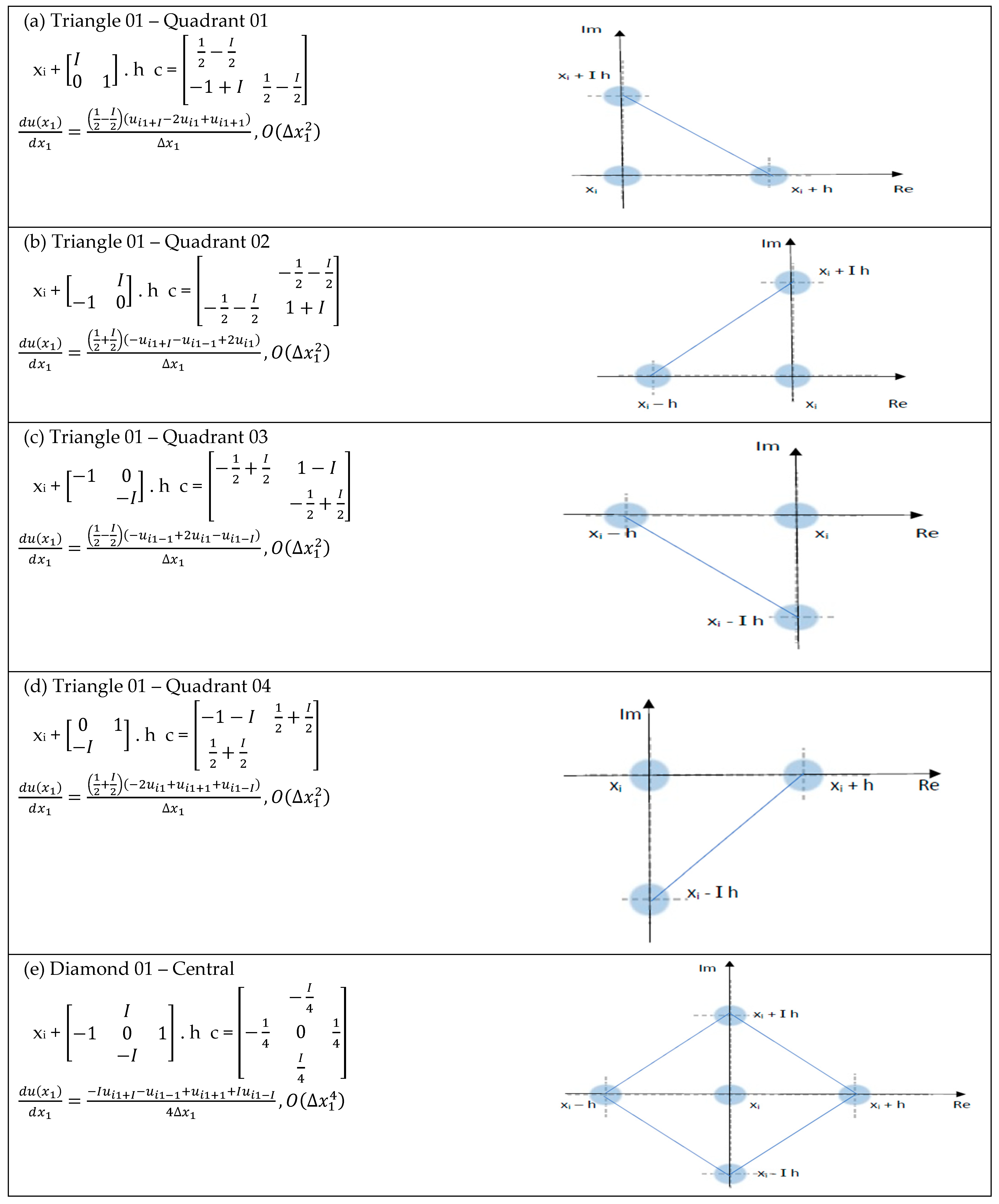
| Triangle 01—Quadrant 01—Figure A1a | 2.72 × 103 | 2.49 × 10 | 5.95 × 10−1 | 4.75 × 10−4 | 2.20 × 10−5 |
| Triangle 01—Quadrant 02—Figure A1b | 5.88 × 103 | 9.82 × 10 | 1.92 × 10−1 | 7.83 × 10−3 | 6.13 × 10−5 |
| Triangle 01—Quadrant 03—Figure A1c | 5.08 × 103 | 1.60 × 10 | 9.20 × 10−1 | 5.90 × 10−3 | 6.71 × 10−5 |
| Triangle 01—Quadrant 04—Figure A1d | 8.42 × 103 | 5.53 × 10 | 1.41 × 10−1 | 6.50 × 10−3 | 2.90 × 10−5 |
| Diamond 01—Central—Figure A1e | 2.56 × 100 | 8.22 × 10−4 | 4.12 × 10−7 | 2.37 × 10−11 | 2.71 × 10−15 |
| Triangle 02—Quadrant 01—Figure A2a | 9.28 × 100 | 2.52 × 10−5 | 9.63 × 10−10 | 3.15 × 10−15 | 8.28 × 10−20 |
| Triangle 02—Quadrant 02—Figure A2b | 8.34 × 100 | 1.43 × 10−5 | 1.60 × 10−10 | 6.00 × 10−15 | 8.71 × 10−20 |
| Triangle 02—Quadrant 03—Figure A2c | 5.20 × 100 | 3.53 × 1005 | 2.10 × 10−10 | 4.60 × 10−15 | 2.78 × 10−21 |
| Triangle 02—Quadrant 04—Figure A3a | 1.81 × 100 | 6.62 × 10−5 | 7.90 × 10−10 | 3.78 × 10−15 | 1.78 × 10−20 |
| Diamond 02—Central—Figure A3b | 2.09 × 10−6 | 2.57 × 10−17 | 3.88 × 10−28 | 1.10 × 10−39 | 2.79 × 10−50 |
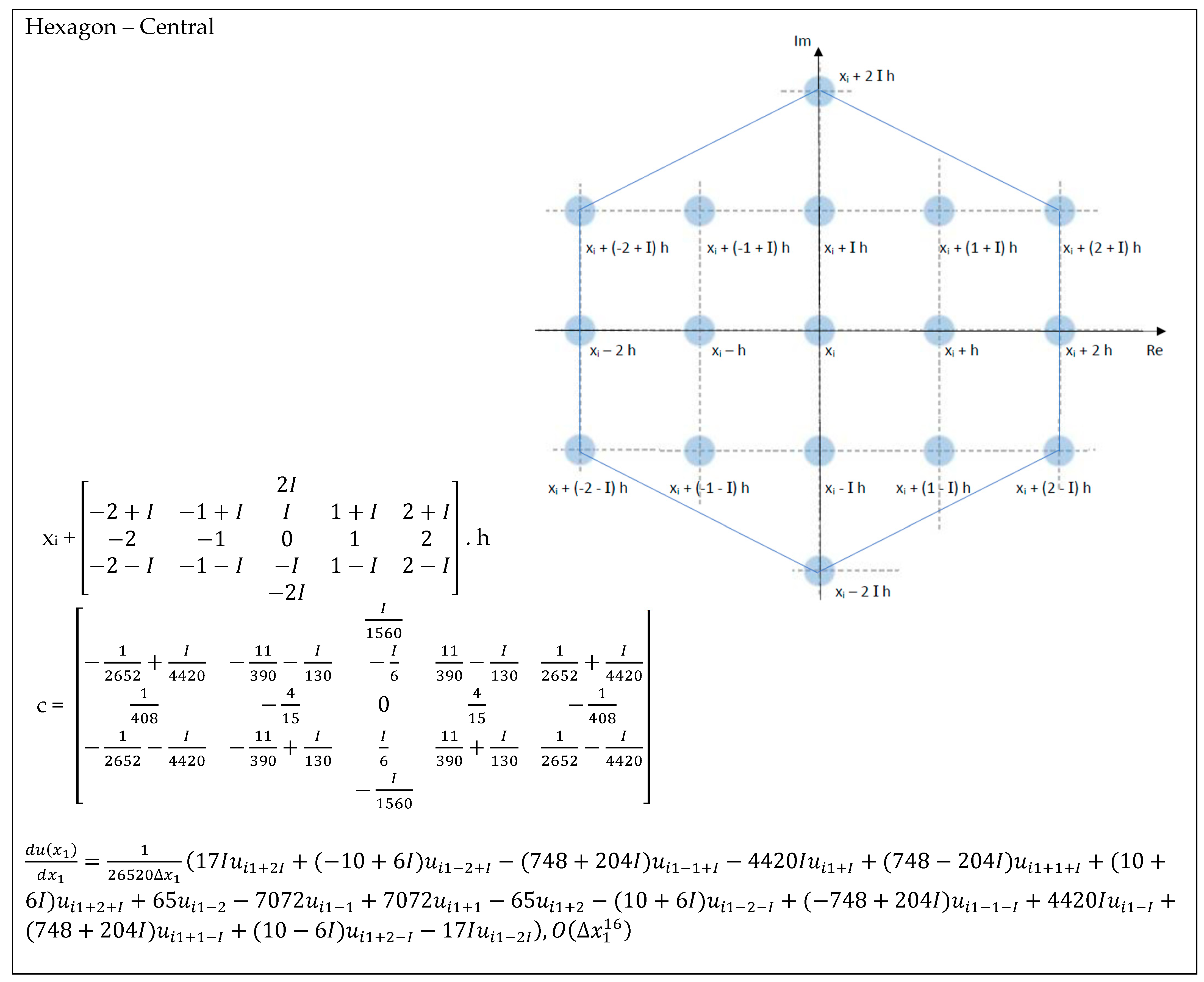
| Hexagon—Central—Figure A4 | 2.96 × 10−12 | 2.63 × 10−27 | 1.18 × 10−43 | 1.59 × 10−59 | 2.87 × 10−75 |
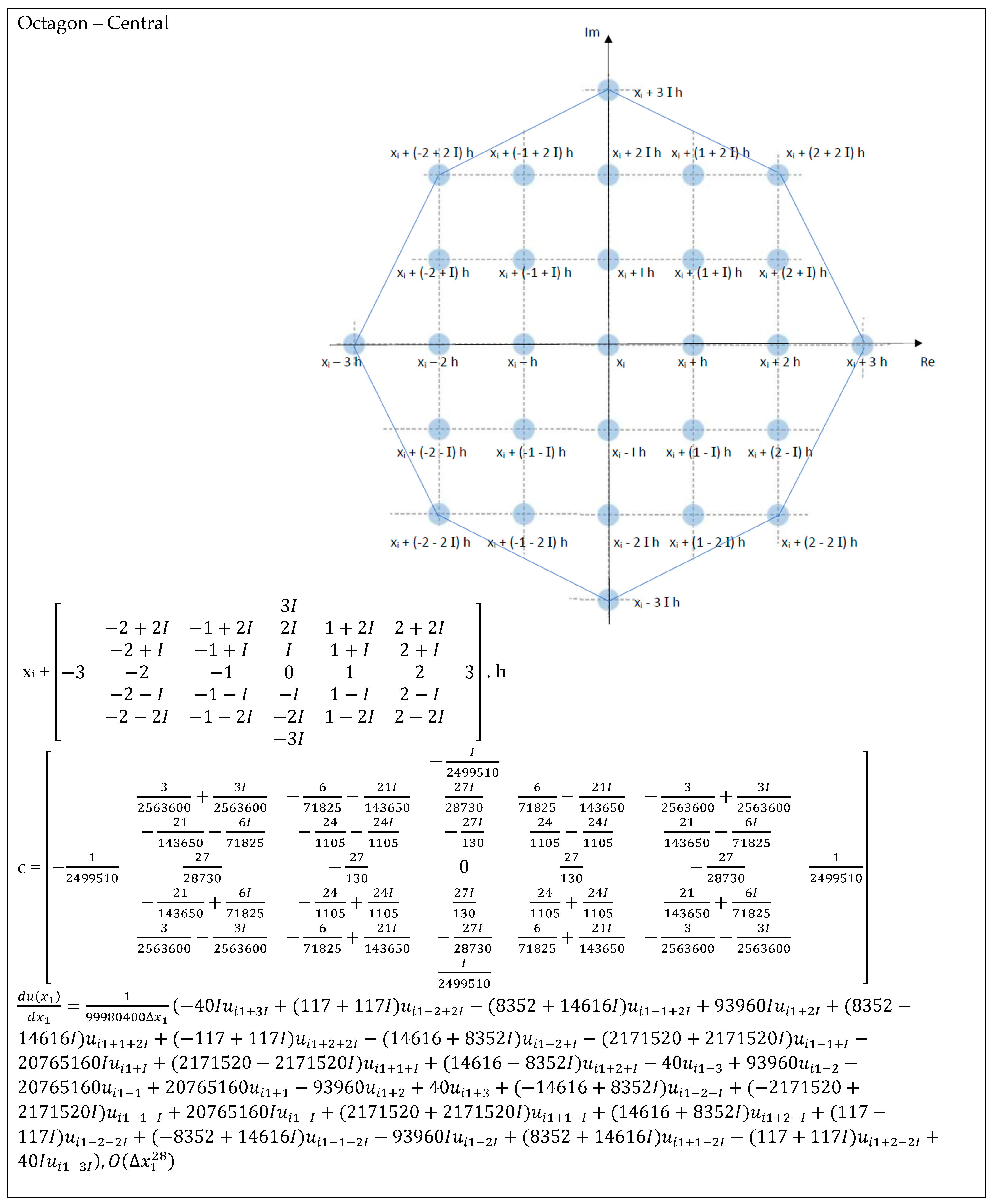
| Octagon—Central—Figure A5 | 2.00 × 10−23 | 1.50 × 10−51 | 1.59 × 10−79 | 2.88 × 10−107 | 3.03 × 10−135 |
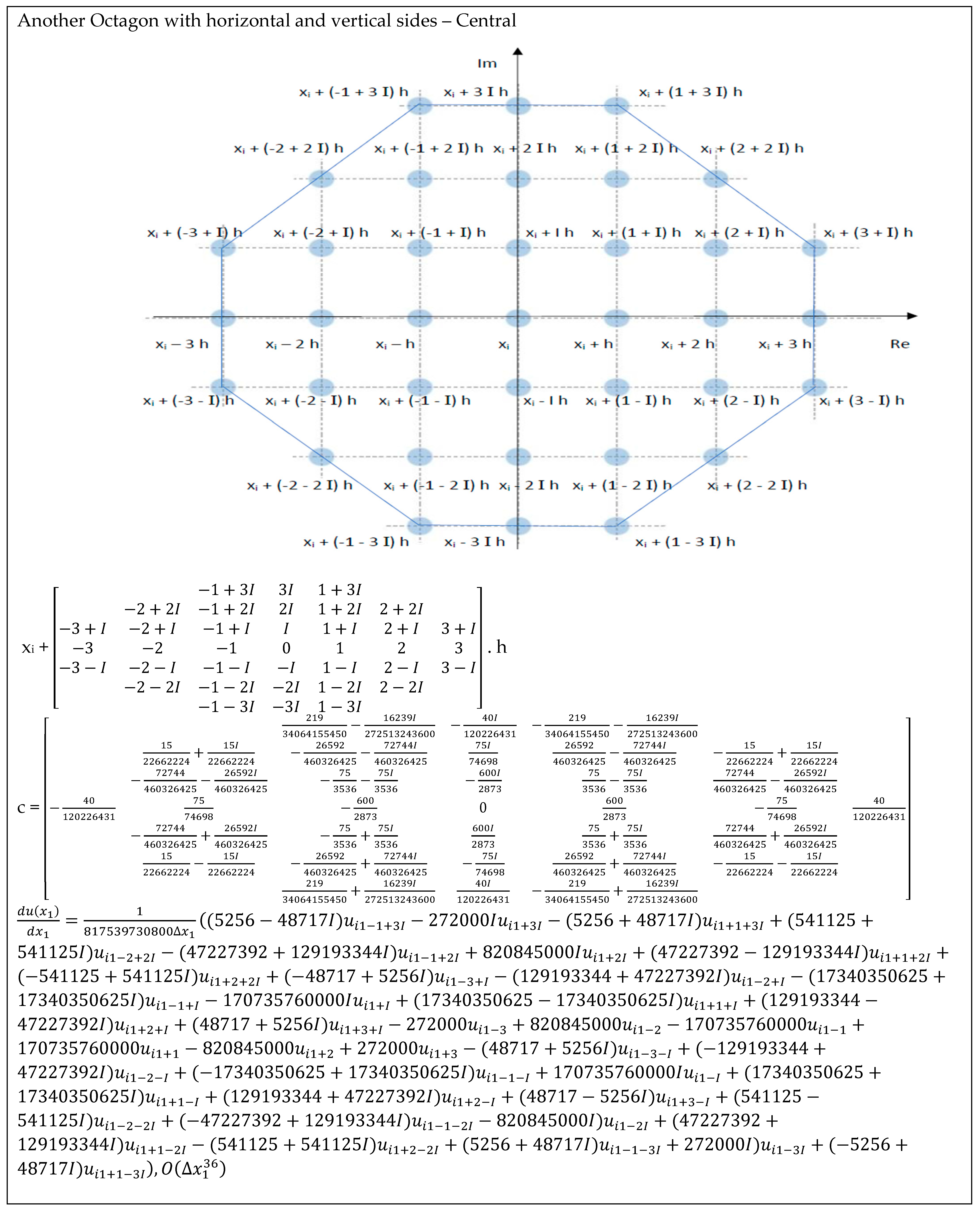
| Another Octagon with horizontal and vertical sides—Central—Figure A6 | 1.22 × 10−32 | 7.50 × 10−68 | 1.90 × 10−103 | 2.38 × 10−139 | 8.11 × 10−176 |
| Dodecagon with horizontal and vertical sides—Central—Figure A7 and Figure A8 | 1.32 × 10−55 | 1.51 × 10−115 | 1.10 × 10−175 | 7.71 × 10−236 | 1.73 × 10−296 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almeida Magalhães, A.L.M.; Brito, P.P.; Lamon, G.P.d.S.; Júnior, P.A.A.M.; Magalhães, C.A.; Almeida Magalhães, P.H.M.; Magalhães, P.A.A. Numerical Resolution of Differential Equations Using the Finite Difference Method in the Real and Complex Domain. Mathematics 2024, 12, 1870. https://doi.org/10.3390/math12121870
Almeida Magalhães ALM, Brito PP, Lamon GPdS, Júnior PAAM, Magalhães CA, Almeida Magalhães PHM, Magalhães PAA. Numerical Resolution of Differential Equations Using the Finite Difference Method in the Real and Complex Domain. Mathematics. 2024; 12(12):1870. https://doi.org/10.3390/math12121870
Chicago/Turabian StyleAlmeida Magalhães, Ana Laura Mendonça, Pedro Paiva Brito, Geraldo Pedro da Silva Lamon, Pedro Américo Almeida Magalhães Júnior, Cristina Almeida Magalhães, Pedro Henrique Mendonça Almeida Magalhães, and Pedro Américo Almeida Magalhães. 2024. "Numerical Resolution of Differential Equations Using the Finite Difference Method in the Real and Complex Domain" Mathematics 12, no. 12: 1870. https://doi.org/10.3390/math12121870
APA StyleAlmeida Magalhães, A. L. M., Brito, P. P., Lamon, G. P. d. S., Júnior, P. A. A. M., Magalhães, C. A., Almeida Magalhães, P. H. M., & Magalhães, P. A. A. (2024). Numerical Resolution of Differential Equations Using the Finite Difference Method in the Real and Complex Domain. Mathematics, 12(12), 1870. https://doi.org/10.3390/math12121870