1. Introduction and Motivation
The Ricker population growth model is one of the most well-known models in population ecology and biology, which describes how the size of a population evolves over time. The linear growth model assumes a constant increase in population over time, whereas the Ricker model incorporates population self-regulation, rendering it nonlinear. The nonlinear dynamics of the Ricker population growth model are expressed by the population growth rate being inversely proportional to the population size, i.e., the growth rate decreases as the population density increases, reflecting competition for finite resources (see [
1]). Inspired by the Ricker population model, various population growth models adapted to specific realities and with different purposes have been proposed in recent decades (see [
2,
3,
4] and references therein).
In particular, we consider the
-Ricker population model whose dynamics of the population
, after
generations, are defined by the difference equation,
where
is the per capita birth or growth function, i.e., a cooperation or interference factor, with
the cooperation parameter or Allee effect parameter,
is the survival function for generation
n or the intraspecific competition, with
the density-independent death rate
, and
the carrying capacity parameter.
The purpose of this work is to investigate the nonlinear dynamics of a new class of “continuous” embedding of the one-dimensional (1D for short)
-Ricker population model into a two-dimensional (2D for short) diffeomorphism. We consider a 2D
-Ricker diffeomorphism,
, which is defined by the following recurrence equations:
where
is the embedding parameter,
and
. This 2D or planar map
is defined in a parameters space, which is given by,
We remark that the particular case
(
) has already been studied in [
2], which corresponds to the classical 1D
-Ricker population model. From the population dynamics point of view, the 2D diffeomorphism
, given by Equation (
2), describes an interaction between two population species
and
, which are related to each other through the planar system
, such that
is the 1D
-Ricker population model, given by Equation (
1), in some parameters space. Thus, in the analyzed case throughout this work, it is said that the 1D
-Ricker population model is embedded into the 2D invertible map or exponential diffeomorphism
. As in several references cited throughout this work, the knowledge of the behaviour of nonlinear dynamics and the bifurcation structures of the 1D
-Ricker population model
gives us a “germinal” state for understanding the performance of the nonlinear dynamics and bifurcations of the 2D exponential diffeomorphism
, for sufficiently small
b-values. The study of diffeomorphisms from a bifurcation theory point of view has been extensively analyzed by Mira in [
5] (see also [
6,
7,
8,
9,
10,
11,
12] and references therein).
The structure of this paper is as follows: In
Section 2, we establish explicit expressions for the fixed points of the 2D
-Ricker diffeomorphism
, defining them as analytical solutions of Lambert
W functions. Given the complexity of the problem, as far as the behaviour of the Allee effect parameter
is concerned, we will carry out our analysis in two separate cases, the odd and even cases. The nature and stability of the fixed points are studied in
Section 3. This analysis is carried out by separating the trivial fixed point from the other fixed points. In particular, in the case of nontrivial fixed points, the associated eigenvalues are written as Lambert
W functions, thus revealing the complexity of the 2D model being analyzed. In
Section 4, the fold and flip global bifurcations of the 2D
-Ricker diffeomorphism
are studied. This study is based on the use of contour lines related to a
k-cycle of
, with
. Similarly to
Section 2, the investigation of bifurcation structures of
in a parameter plane will be performed by considering the Allee effect parameter odd or even separately. In particular, the numerical cases explored in this section confirm and illustrate the theoretical results of the previous sections. Finally, in
Section 5, we discuss our work and provide some relevant conclusions, presenting some future research perspectives in this area. This study presents the results of numerical simulations conducted in
Mathematica,
Maple,
Fortran and
Python.
2. Lambert Functions as Analytical Solutions of the Fixed Points of
In this section, we will study the existence of fixed points of the 2D -Ricker diffeomorphism . We will see that the trivial fixed point exists for all and we will define, in Propositions 1 and 2, conditions for the existence of other fixed points.
For simplification, we will use the following notation from now on:
where
and
are defined as in Equation (
2).
The fixed points of
are obtained by solving the next system,
The previous system is reduced to an equation only in the variable
x, given by,
So, we are going to introduce a real function, only in the variable
x,
, defined by,
whose equation of its fixed points corresponds to a reduction of the system given by Equation (
5), in 2D, to a problem of determining fixed points in 1D. However, the equation of the fixed points of
, given by Equation (
7), is an implicit equation in the variable
x.
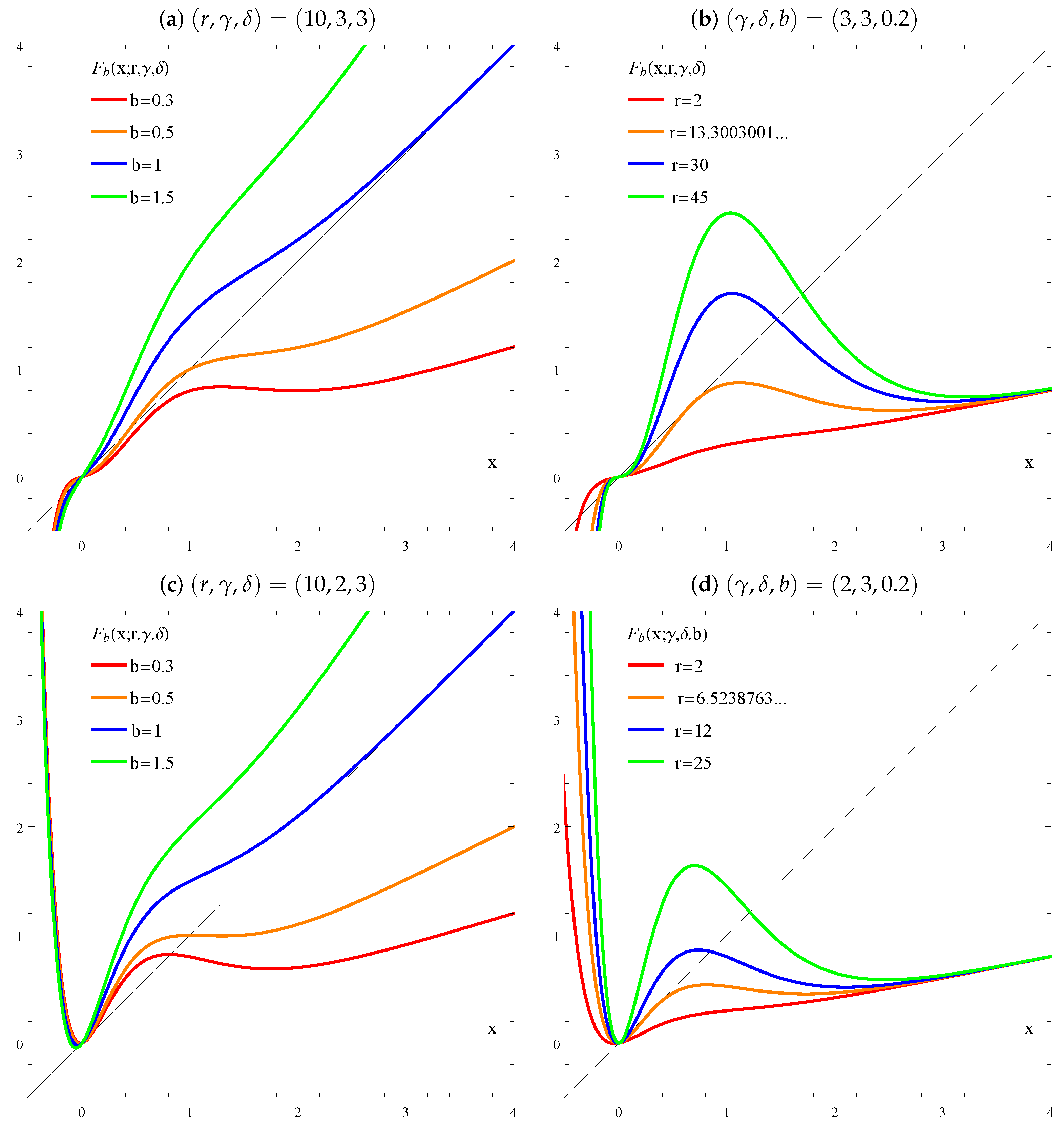
Some graphics of
are plotted in
Figure 1 for certain parameter values at
. We can see that in
Figure 1a, according to the variation in the parameter
b and for the fixed parameters
(
is odd), there is always the fixed point
, but there may also be three nonzero fixed points (orange graphic) or a negative solution (red graphic). Note that the case
(blue graphic) represents an asymptotic behaviour only with the fixed point
. The green graphic
also only admits the
fixed point. On the other hand,
Figure 1b (
is odd) shows the usual behaviour of an Allee effect function, for
, according to the variation in the parameter
r and for the fixed parameters
. In this case, all the examples of
have a negative fixed point and the blue and green graphics
have four fixed points. For the class of Allee effect functions, the fixed point (0,0) always exists, and a fold bifurcation creates two nonzero fixed points. For more details on Allee effect functions see, for example, [
2,
13] and references therein.
Figure 1c (
is even) depicts graphics of
where there is a single fixed point
, which is the blue graphic, two fixed points (
and one negative), which is the green graphic, and three fixed points corresponding to the orange and red graphics (
and two positive fixed points).
Figure 1d (
is even) shows examples of Allee effect functions, where the negative fixed point does not exist, the fixed point
always exists and there are at most two positive fixed points (blue and green graphics).
The previous numerical simulations suggest that the system given by Equation (
5) may, in some cases, have at least the
solution and at most four fixed points. In the case of four fixed points, we have identified the null solution, two positive fixed points and one negative fixed point, or the vice versa case. Note that, for some parameter values
, the following property is verified.
Property 1. Let be the real function defined by Equation (7). In the parameters space, if , then the following property holds true: The result of Property 1 was identified in [
14] as a mirror symmetric map, in the context of kneading theory. Note that, using Property 1, we may conclude that if
x is a fixed point of
, then
is a fixed point of
, for
, because it turns out,
This result shows that in the case
, there is a special behaviour in the existence of the fixed points of
and consequently in the associated bifurcation structures, as can be seen in the results presented in
Section 2.1 and
Section 4.1.
Throughout this work, we will consider the set of the fixed points of in denoted by . The main result of this work is the following theorem, which establishes the maximum number of fixed points of :
Theorem 1. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, the following properties hold true: - (i)
if , then has a maximum of four fixed points;
- (ii)
if , then has a maximum of three fixed points.
The result of Theorem 1 will be proved over the next few sections, where various cases will be analyzed. Considering the structure of the system for determining the fixed points of
, given by Equation (
5), and the numerical results provided by Equation (
7), where some examples are illustrated in
Figure 1, we use the Lambert
W functions to support this study.
In this work, we consider the Lambert
W function as the real analytic inverse of the function
. The inverse is defined only for
and is double-valued at the point
. The real branches of the Lambert
W function are denoted by
and
. Branch
is referred to as the principal branch, which is increasing for
, and the lower branch is denoted by
, which is decreasing from
to
(see
Figure 2). The Lambert
W function is associated with the logarithmic function and arises from many models in the natural sciences, where we can mention a vast diversity of applications and problems in physics, biological, ecological and evolutionary models (see [
15]). For more details and applications of the Lambert
W function, see, for example, [
2,
3,
4,
16,
17,
18,
19,
20] and references therein. However, the complexity of problems involving transcendental functions of this type have evolved and in parallel new and more complex functions have been defined and developed in this category, namely, the generalised Lambert
W function. For more details on this subject, see [
21,
22,
23,
24,
25,
26].
For
, the system given by Equation (
5) is written in equivalent form as follows:
So, we established the first result about the fixed points of
.
Property 2. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, the point is always a fixed point of . The existence of nontrivial fixed points will be studied in two separate cases: case I, for , and case II, for . We remark that, the particular cases and will be analyzed throughout this work.
2.1. Case I:
Now, we will focus on analyzing Equation (
8), when
, i.e.,
is an odd natural number
. In this case, the nonzero solutions given by Equation (
8) are written as follows:
Equivalently, we have the following equalities:
In a simplified form, the equations given by Equation (
10) can be presented as follows:
Thus, we can establish that the equation given by,
in Equation (
9), for
, is written in an equivalent way as a transcendental equation, given by,
Observe that Equation (
13) is written in generalised form as
, with
and
.
Thus, we may conclude that Equation (
13) defines two Lambert
W functions given by,
where the real arguments are defined by,
Consequently, the analytical solutions of Equation (
11), i.e., the fixed points of
for
and
, are written as follows:
However, the Lambert W functions , with , exhibit some properties that deserve attention, as they are decisive in our results.
Property 3. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4) and be the real arguments of the Lambert W functions, with , given by Equation (14). In the parameters space, with , the following properties hold true: - (i)
if , then ;
- (ii)
if , and , then is not admissible for ;
- (iii)
if , and , then is not admissible for ;
- (iv)
if , and , then is not admissible for ;
- (v)
if , and , then is not admissible for .
Proof. The above results follow from the definition of the Lambert
W functions, given by Equation (
13), and the respective analysis of Equation (
14), according to the variation in the parameters
, with
. The proof of these results is derived from the definition of the Lambert
W functions; namely, a real Lambert
W function is defined only for
and is double-valued at the point
. The principal branch
is increasing for
, and the lower branch
is decreasing from
to
. It can, therefore, be stated that for all values
, the principal real branch
is unique. Furthermore, for
, there exist the two branches
and
. □
Given the properties of Lambert W functions and the results of Property 3, we prove in the following proposition the result of Theorem 1 in the case .
Proposition 1. Let be the 2D γ-Ricker diffeomorphism and be the real arguments of the Lambert W function, with , given by Equation (14). In the space, with , the following properties hold true: - (i)
if and , then Equation (15) has one nonzero solution and consequently has the nontrivial fixed point, - (ii)
if and , then Equation (15) has two nonzero solutions and consequently has two nontrivial fixed points, - (iii)
if and , then Equation (15) has no real-valued solutions; - (iv)
if and , then Equation (15) has one nonzero solution and consequently has the nontrivial fixed point, - (v)
if and , then Equation (15) has two nonzero solutions and consequently has two nontrivial fixed points, - (vi)
if and , then Equation (15) has no real-valued solutions.
Proof. Let
be the real argument of the Lambert
W function, given by Equation (
14), in the
parameters space. Considering the properties of the Lambert
W function and according to the results of Property 3, if
, it follows from Equation (
15) that the equation of the fixed points, given by Equation (
12), i.e.,
, has only one nonzero analytical solution, given by the Lambert
W function,
It follows that
has a nontrivial fixed point
, given by Equation (
16).
Figure 3a–c are examples of this case. Thus, the result of item (i) follows.
To prove the result of item (ii), we will use the lower branch of the Lambert
W function, denoted by
. The branch
is decreasing from
to
. Note that, if
, then
is double-valued (see
Figure 2). Consequently, from Equation (
15), it follows that Equation (
12) has two nonzero solutions, given by the two Lambert
W function branches,
and
such that,
Thus, it follows that
has the nontrivial fixed points
and
, given by Equations (
17) and (
18), respectively. So, item (ii) is proved.
Concerning item (iii), note that the Lambert
W function has no real values for
, because this transcendental function has complex values for these domains. Therefore, in this case,
has the unique fixed point
(see
Figure 3a–c). Thus, the result of item (iii) follows.
If
we use similar arguments as the ones used to prove item (i); it follows from Equation (
15) that the equation of fixed points, given by Equation (
12), has only one nonzero analytical solution, given by the Lambert
W function in Equation (
13), i.e.,
So, it follows that
has the nontrivial fixed point
, given by Equation (
19) (see also
Figure 3a–c).
Finally, to prove the results of items (v) and (vi), arguments similar to those already justified in the proof of items (ii) and (iii) are used. This completes the proof of the proposition. □
Note that, according to Property 3, the results of items (ii) and (v) of Proposition 1 do not happen simultaneously because when
, it can be seen that
(see
Figure 3c). Thus, in the case
, from Property 2 and Proposition 1, the 2D
-Ricker diffeomorphism
has a maximum of four fixed points. Consequently, the result of Theorem 1 (i) is proven.
The numerical studies presented in
Figure 3 demonstrate the intricacies of employing Lambert
W functions to ascertain analytically the fixed points of the 2D
-Ricker diffeomorphism
. In particular, in
Figure 3a for
and
, there are three fixed points:
,
and
. On the one hand, in
Figure 3c, for
and
, there are three fixed points:
,
and
. On the other hand, in
Figure 3c, for
and
, there are also three fixed points:
,
and
, confirming in this particular case the result of the Property 1.
2.2. Case II:
In this section, we study the nonzero solutions of Equation (
8) when
and
, i.e., the parameter
is an even natural number
. In this case, Equation (
8) is equivalently written as follows,
So, considering the definition of the Lambert
W function, given by Equation (
14), in this case, we have just one Lambert
W function,
whose real argument is given by,
Consequently, the analytical solutions of Equation (
22), or the fixed points of
for
and
, are written as follows,
Remark 1. This case is similar to the case and , for . See the implication of this result in the bifurcation structure of presented in Section 4.2. Property 4. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4) and be the real argument of the Lambert W function, given by Equation (23). In the parameters space, with , the following properties hold true: - (i)
if , and , then is not admissible for ;
- (ii)
if , and , then is not admissible for ;
- (iii)
if , and , then is not admissible for ;
- (iv)
if , and , then is not admissible for .
Proof. The proof of the above results follow from the definition of the Lambert
W function, given by Equation (
22), as shown in the proof of Property 3, and the respective analysis of Equation (
23), according to the variation in the parameters
, with
. □
The results of Properties 3 and 4 prove how complex the Lambert W functions that define the fixed points of are. In the next result, we prove Theorem 1 in the case .
Proposition 2. Let be the 2D γ-Ricker diffeomorphism and be the real argument of the Lambert W function, given by Equation (23). In the space, with , the following properties hold true: - (i)
if and , then Equation (24) has one nonzero solution and consequently has the nontrivial fixed point, - (ii)
if and , then Equation (24) has two nonzero solutions and consequently has two nontrivial fixed points, - (iii)
if , then Equation (24) has no real-valued solutions and consequently has a a single fixed point .
The proof of this proposition is similar to the proof of Proposition 1 for
(see also
Figure 3d). So, in the case
, from Property 4 and Proposition 2, the 2D
-Ricker diffeomorphism
has a maximum of three fixed points. Consequently, the result of Theorem 1 (ii) is proven.
Remark 2. Note that, when , there is only the solution , given by Equation (25). On the other hand, when , there are two solutions and , given by Equations (26) and (27), respectively. This behaviour will be duly explored in Section 4 concerning the study of bifurcation structures of . Thus, in this section, we proved how the fixed points of the 2D
-Ricker diffeomorphism
may be defined as analytical solutions of the Lambert
W functions, given by Equations (
13) and (
22).
Figure 3 illustrates and complements the results of Propositions 1 and 2 for several numerical cases, according to the variation in the parameters in
. In particular,
Figure 3c illustrates the mirror symmetry referred to in Property 1.
3. Nature and Stability of the Fixed Points of
In the following results, we study the nature and stability of the fixed points of
in the
parameters space. The fixed point
is studied in
Section 3.1.
Section 3.2 is devoted to the study of the nontrivial fixed points.
3.1. The Fixed Point
In Property 5, we present the eigenvalues of the Jacobian of on the trivial fixed point for . The classification of according to its stability is performed in Property 6. From the perspective of dynamic systems, the examination of the eigenvalues of the Jacobian matrix enables the identification of the stability zones of the various fixed points.
Property 5. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4). In the space, the following properties hold true: - (i)
if , then the eigenvalues of the Jacobian of on the trivial fixed point are and ;
- (ii)
if , then the eigenvalues of the Jacobian of on the trivial fixed point are and .
Proof. Considering Equation (
4), the Jacobian matrix of
, denoted by
, is given by,
The eigenvalues of
are the solutions of the characteristic polynomial, which is given by,
where
I is the
identity matrix and
is odd or even.
Note that the partial derivative of
in order to
in a neighborhood of
when
, verifies
Consequently, the characteristic polynomial, in a neighborhood of the fixed point
, is well defined only for
If
, considering the fixed point
at Equation (
28), we obtain the equation
, and the eigenvalues are
for
. So, the result of item (i) follows.
For
, the characteristic equation, given by Equation (
28), is
and the eigenvalues are
, for
. Thus, the result of item (ii) follows. This completes the proof. □
Now, we have the conditions to determine the nature and stability of the trivial fixed point of , considering the Allee effect parameter as either odd or even.
Property 6. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, for , the fixed point is classified as follows: - (i)
stable node, if ;
- (ii)
Lyapunov critical case, if ;
- (iii)
unstable node, if ;
- (iv)
stable focus, if ;
- (v)
Lyapunov critical case, if ;
- (vi)
unstable focus, if .
Proof. For , the eigenvalues of the Jacobian matrix of on are and , as proved in Property 5 (i). It follows that , with , are real if, and only if, . In this case, the fixed point is a stable node if, and only if, and , that is, . This proves item Also, for , the fixed point is an unstable node if, and only if, and , that is, . The result of item (iii) follows. The case implies that and , which corresponds to a Lyapunov critical case. This proves item (ii).
In the case , the eigenvalues are complex numbers. If , then is a stable focus, as stated in (iv), and it is an unstable focus for , as stated in (vi). The case implies that and . So, the result of item (v) follows. This completes the proof. □
From Property 6, we can conclude that the fixed point
is stable, for
with
, regardless of the value of the other parameters in
. The next result summarizes a particular case of the previous results, the proof of which is a direct consequence of Properties 5 and 6, for
. We remark that, for
, we have that
. This result will be extremely important for
Section 4.
Corollary 1. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, if , then the fixed point is unique and corresponds to a Lyapunov critical case, i.e., . In the classification of the fixed point , for , we will use the following lemma:
Lemma 1 ([
27])
. Assume that and are the roots of If , then the following results hold:- (i)
and if, and only if, and ;
- (ii)
and or and if, and only if, ;
- (iii)
and if, and only if, and ;
- (iv)
and are two complex roots with if, and only if, and
- (v)
and if, and only if, and
The characteristic equation of the Jacobian matrix of , on the fixed point for , is given by So, we may state the following results:
Lemma 2. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, for , if , then the fixed point is classified as follows: - (i)
a repeller point if, and only if, and ;
- (ii)
a saddle point if, and only if, ;
- (iii)
an asymptotically stable point if, and only if, and ;
- (iv)
a non-hyperbolic point if, and only if, and or and .
Proof. Consider and let be the characteristic polynomial of the Jacobian matrix of , on the fixed point The roots of are , for , as proved in Property 5 (ii).
Note that the condition
, mentioned in Lemma 1, is equivalent to writing,
The fixed point
is a repeller point if, and only if,
and
Using Lemma 1, it follows that
, for
, if, and only if,
and
. This is equivalent to writing,
So, the item (i) is proved.
The saddle point case happens if, and only if, and or and Attending to Lemma 1, it follows that this happens if, and only if, i.e, Thus, the result of item (ii) follows.
The fixed point is asymptotically stable if, and only if, and It follows from Lemma 1 that , for , if, and only if, and . This is equivalent to This proves item (iii).
To prove item (iv), we have to consider two cases. The case
and
corresponds to a non-hyperbolic fixed point, where the eigenvalues are real. In this case, from Lemma 1, we have
and
This is equivalent to,
The second case, where the eigenvalues
and
are complex numbers with
, happens if, and only if,
This completes the proof. □
The results established in Lemma 2 show how important is the trivial fixed point of
for
. In the particular case
, this complexity is associated with the existence of the Allee effect for the 1D
-Ricker model
(see [
2]).
3.2. The Nontrivial Fixed Points
The study of the nature and stability of the nontrivial fixed points of is described in this subsection. We will see that the eigenvalues of the Jacobian of on the nontrivial fixed points may be written as functions of Lambert W functions.
Proposition 3. Let be the 2D γ-Ricker diffeomorphism and be the real arguments of the Lambert W functions, with , given by Equation (14). In the space, with , the following properties hold true: - (i)
if and , then the eigenvalues of the Jacobian of on the fixed point , given by Equation (16), are, - (ii)
if and , then the eigenvalues of the Jacobian of on the fixed points and , given by Equations (17) and (18), respectively, are, respectively;
- (iii)
if and , then the eigenvalues of the Jacobian of on the fixed point , given by Equation (19), are, - (iv)
if and , then the eigenvalues of the Jacobian of on the fixed points and , given by Equations (20) and (21), respectively, are,
Proof. The eigenvalues of the Jacobian
are the solutions of the characteristic polynomial, which is given by Equation (
28). Concerning the fixed points
given by Equation (
16), these fixed points satisfy Equation (
12), i.e.,
. Therefore, the characteristic polynomial given by Equation (
28) may be rewritten as follows:
Consequently, the eigenvalues of
on
, referred in item (i), are given by,
Thus, we obtain the desired result of item (i).
The same arguments may be used to obtain the eigenvalues of
on the fixed points
, for
, referred in items (ii)–(iv). Note that the values
and
all satisfy Equation (
12) and are written as analytical solutions of Lambert
W functions. This completes the proof. □
Similar arguments as the ones used to prove the last results are used to prove the following one, but in this case for .
Proposition 4. Let be the 2D γ-Ricker diffeomorphism and be the real argument of the Lambert W function, given by Equation (23). In the space, with , the following properties hold true: - (i)
if and , then the eigenvalues of the Jacobian of on the fixed point , given by Equation (25), are, - (ii)
if and , then the eigenvalues of the Jacobian of on the fixed points and , given by Equations (26) and (27), are,
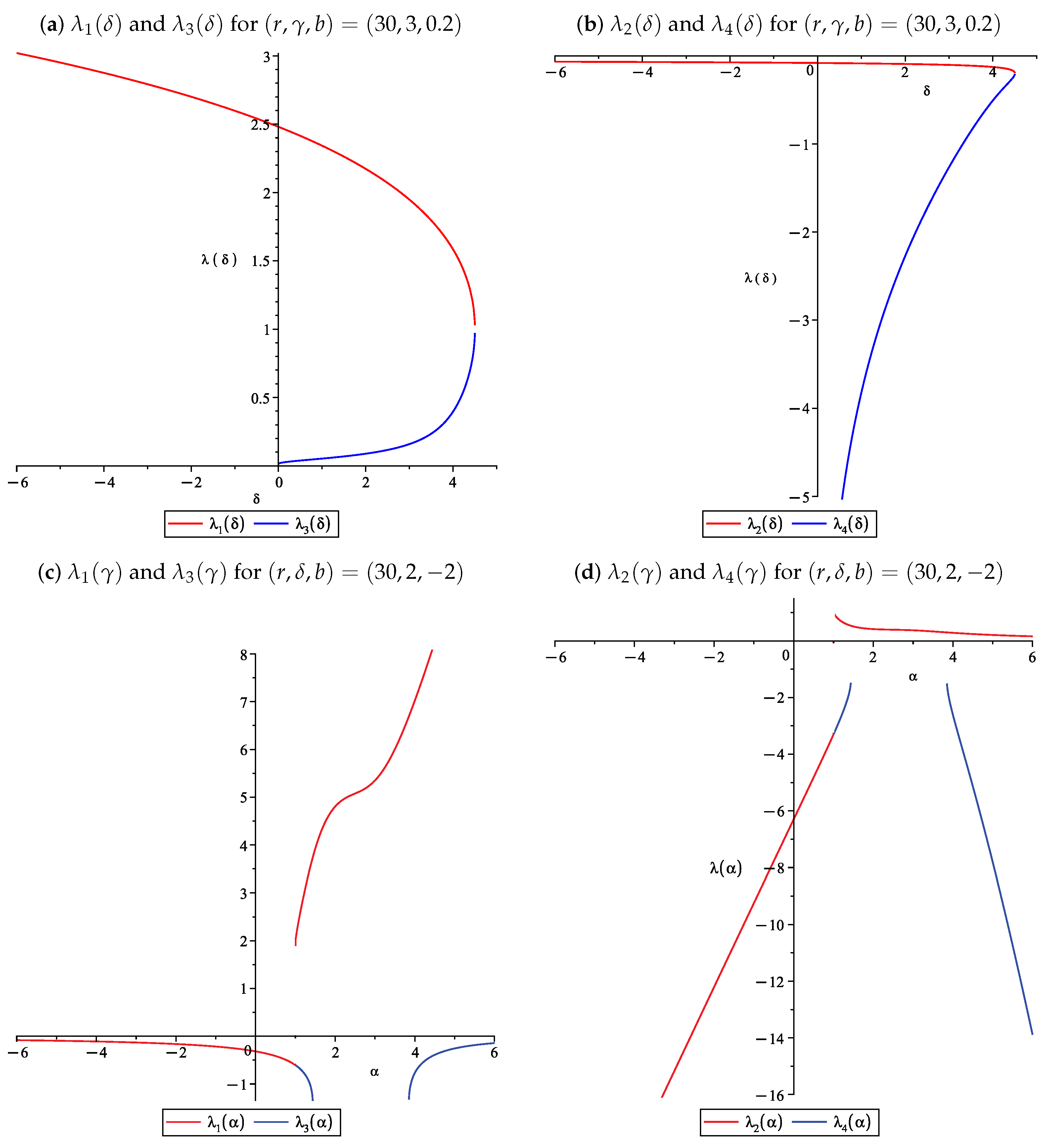
Note that, in Propositions 3 and 4, the eigenvalues of the Jacobian of
on the nontrivial fixed points are written as functions of Lambert
W functions.
Figure 4 illustrates the variation in these eigenvalues according to the variation in the parameter
(see
Figure 4a,b), and according to the variation in the parameter
(see
Figure 4c,d).
We now have the conditions to use Lemma 1 to obtain the nature and stability of the nontrivial fixed points
of
, with
, obtained in Propositions 1 and 2. Note that whether the Allee effect parameter is odd or even, i.e.,
or
, the roots of the characteristic polynomial of the Jacobian of
, on these fixed points, are given by the following equation,
Therefore, the next result is valid for both
odd and even. Note also that, from Corollary 1, we may assume
.
Lemma 3. Let be the 2D γ-Ricker diffeomorphism defined by Equation (4). In the space, for , if , then the fixed points , with , given by Equations (16)–(21) and (25)–(27), are classified as follows: - (i)
a repeller point if, and only if, and ;
- (ii)
a saddle point if, and only if, ;
- (iii)
an asymptotically stable point if, and only if, and ;
- (iv)
a non-hyperbolic point if, and only if,
- (a)
and ;
- (b)
and .
Proof. The characteristic polynomial of the Jacobian matrix of
, on the fixed points
, with
, is
, where each
is given by Equations (
16)–(
21) and Equations (
25)–(
27), respectively.
Note that the condition
, mentioned in Lemma 1, is equivalent to writing,
The last equivalence is valid because as
by the definition of
in Equation (
3) and we are considering the nontrivial fixed points of
, then
. Thus, we conclude that
.
To prove item (i), each fixed point
, with
, is a repeller point if, and only if, the corresponding eigenvalues verify
and
Considering Lemma 1, it follows that
, for
, if, and only if,
and
. These conditions are equivalent to,
This proves item (i).
The fixed point
, with
, is a saddle point if, and only if,
and
or
and
Using Lemma 1, it follows that this happens if, and only if,
that is
So, the result of item (ii) follows.
The fixed point
, with
, is asymptotically stable if, and only if,
and
It follows from Lemma 1 that
, for
, if, and only if,
and
. This is equivalent to
Thus, we obtain the desired result of item (iii).
To prove item (iv), we have to consider two cases. The case
and
corresponds to a non-hyperbolic fixed point, where the eigenvalues are real. In this case, from Lemma 1, we have
and
This is equivalent to,
This proves subitem
of (iv). The second case, a non-hyperbolic fixed point where the eigenvalues
and
are complex numbers, with
, is verified if, and only if,
This proves subitem
of (iv) and completes the proof. □
Note that the results established in Lemma 3 (i) and (iii) justify the definition of the embedding parameter
, as stated in the definition of
, given by Equation (
3).
Given the complexity of the eigenvalues of the Jacobian of on the nontrivial fixed points, written in Propositions 3 and 4 as transcendental functions defined by Lambert W functions, and the respective classification established in Lemma 3, only the study of the bifurcations structure of , presented in the next section, will provide a better understanding of its nonlinear dynamics.
4. Bifurcation Structures of the 2D -Ricker Diffeomorphism
This section is devoted to the study of the bifurcation structures of the 2D
-Ricker diffeomorphism
. In view of the complexity of the fixed point expressions of
, given by Propositions 1 and 2, which correspond to transcendental functions defined by Lambert
W functions, and in order to analyze the bifurcation structures of
, we consider the notion of contour lines in a parameter space. From now on, let
be one of the
k points of a cycle of order
, with
, given by Equation (
4), and
be the
k-iterated function from
. Consider the following expressions defined as follows,
and
where
N is the trace and
is the determinant of the Jacobian matrix of
, i.e.,
, respectively. The real number
such that
is called the
reduced multiplier of the considered
k-cycle. Note that the determinant of the Jacobian matrix of
is
.
Definition 1. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4), and . In the space, a contour line σ related to a k-cycle of is a curve which satisfies the following equations:for a fixed value of and . The notions of reduced multiplier, contour line and some properties concerning them are given in [
28,
29] (see also [
11,
12]). Note that a fixed point is also denoted by
-cycle, where
is an index characterising the cycle and exchange order of the cycle points by successive applications of
. Generally, a
k-cycle is designated by
(see [
5]).
In the following results, we establish the existence of the fixed points of on the corresponding contour lines .
Proposition 5. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4), and . In the space, with , the following properties hold true: - (i)
for , the fixed point exists on the contour line - (ii)
for , the fixed points exist on the contour lines
Proof. The proof of the previous results follows directly from Definition 1; considering
, it follows,
We remark that the equation
is given by Equation (
6). From the analysis of the
-Ricker diffeomorphism
, the previous system can be written in the following equivalent form:
So, the claims (i) and (ii) are proved. □
Remark 3. The fixed points , for , are the fixed points where the fold bifurcations occurs. So, the fixed points defined by Propositions 1 and 2 are the fixed points that are born from this bifurcation, according to the variation in the parameters stipulated in these results. In the particular case , note that from Corollary 1, the fixed point corresponds to a Lyapunov critical case, i.e., , and exists on the contour line . On the other hand, considering in Equation (42), we obtain , independent of the value of σ. From this, the set defined by,is a singular set. Figure 5 and Figure 7 illustrate this remark. Our next focus is the study of the bifurcation structures of in the parameter plane , denoted by , for the Allee effect parameter odd or even, and considering the parameter constant.
4.1. Case I: Parameter Plane , for
The following proposition establishes a linear dependence between the fold and flip bifurcation curves of and , for the fixed points in the parameter plane , considering the Allee effect parameter .
Remark 4. From [28] and Definition 1, it is known that, for a k-cycle, a contour line is a fold bifurcation curve, denoted by , and a contour line is a flip bifurcation curve, denoted by (see also [11,12]). Proposition 6. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4), and . In the space, where and are defined as in Proposition 5 (ii), with , the following properties hold true: - (i)
if , then the fold or saddle-node bifurcation relative to the fixed points of in the parameter plane is given by, with , for constant;
- (ii)
if , then the flip or period-doubling bifurcation relative to the fixed points of in the parameter plane is given by, with , for constant.
Proof. Considering Equations (
4), (
39) and (
40), Definition 1, Proposition 5 and Remark 4, we can establish that the fold or saddle-node bifurcation relative to the fixed points
of
in the parameter plane
, with
,
and
constant, satisfies the following equations,
Thus, we obtain the desired result of item (i).
In a similar way, claim (ii) is obtained by applying Definition 1, Proposition 5 and Remark 4, for
and
. Consequently, the flip bifurcation relative to the
-cycle of
satisfies the following equations,
Therefore, we obtain the result of claim (ii). □
Equations (
48) and (
49) give us the explicit equations of the fold and flip bifurcation curves relative to the fixed points of
, in the parameter plane
. In
Figure 5 are plotted the fold bifurcation curve
and the flip bifurcation curve
, given by Equations (
48) and (
49), respectively, for
and
. Note that the fold and flip bifurcation curves defined by
and
are only defined in the semi-plane
of the parameter plane
. This behaviour is a consequence of Property 3 because if
, then
. This means that
has no real fixed points for
and consequently there are no bifurcation curves for this cycle. Thus, in the semi-plane
exists a bifurcation cascade of
, which occurs in an interval of existence of an attractive limit set at a finite distance, which is defined by,
This set is called a “principal” box or first box of the first kind
, where occur all the possible bifurcations of
in
. The box
starts at
, given by Equation (
48), when the attracting fixed point
appears and the fold bifurcation of
occurs at
. The end of this box is verified at
, when the first homoclinic bifurcation of the fixed points appears (see [
5]). On one hand, an increase in the parameter
r through the interval
generates the set of all bifurcations of
in the
parameter plane, for
(see
Figure 5). We remark that we use the letters H and B to denote and differentiate the bifurcation curves in the semi-planes
and
, respectively.
On the other hand, in the semi-plane
of the parameter plane
, for
, a bifurcation cascade of
is detected for the second box
associated with a cycle of order
, defined by,
where
is given by Equation (
41), for
and
, and
is given by the parameter value for which the first homoclinic bifurcation of the cycle of order
appears (see [
5]). In
Figure 5, we can see the fold bifurcation curve
of the cycle
, for which the box
starts and then it follows the period doubling region. Still, on the semi-plane
, with
, we see the existence of a cusp point
related to the cycle of order
, from which emerges a saddle area. The existence of this cusp point
allows us to consider the emergence of a communication area, which will be centered on this fold codimension-2 singularity. A detailed description of a saddle communication area can be found in [
4,
28] and the references therein. This particular bifurcation structure develops into another independent box of those previously considered in Equations (
50) and (
51). In this case, we have a third box
associated with a cycle of order
, defined by,
where
is given by Equation (
41), for
and
, and
is given by the parameter value for which the first homoclinic bifurcation of this cycle of order
appears, restricted to the parameter values considered.
In the following result is presented a property that characterizes the bifurcation structure of in the parameter plane.
Property 7. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4). In the space, if and constant, then, in the parameter plane exists a flip codimension-2 bifurcation point relative to the fixed points of (parametric node) given by, Proof. From Proposition 6, in particular Equations (
46) and (
47), and concerning the
parameter plane, for
and
constant, if we consider the limit when
, then it follows,
Consequently, the point
is a tangency of the fold and flip bifurcation curves
and
relative to the fixed points of
. From Corollary 1, considering
, the fixed point
is unique and corresponds to a Lyapunov critical case, i.e.,
, independent of the
value (see also Remark 3). Thus, we obtain the desired result (see also
Figure 5). □
Note that from
Figure 5, on the singular set
, given by Equation (
45), it is also verified that,
where
is the fold bifurcation curve relative to a cycle of order
.
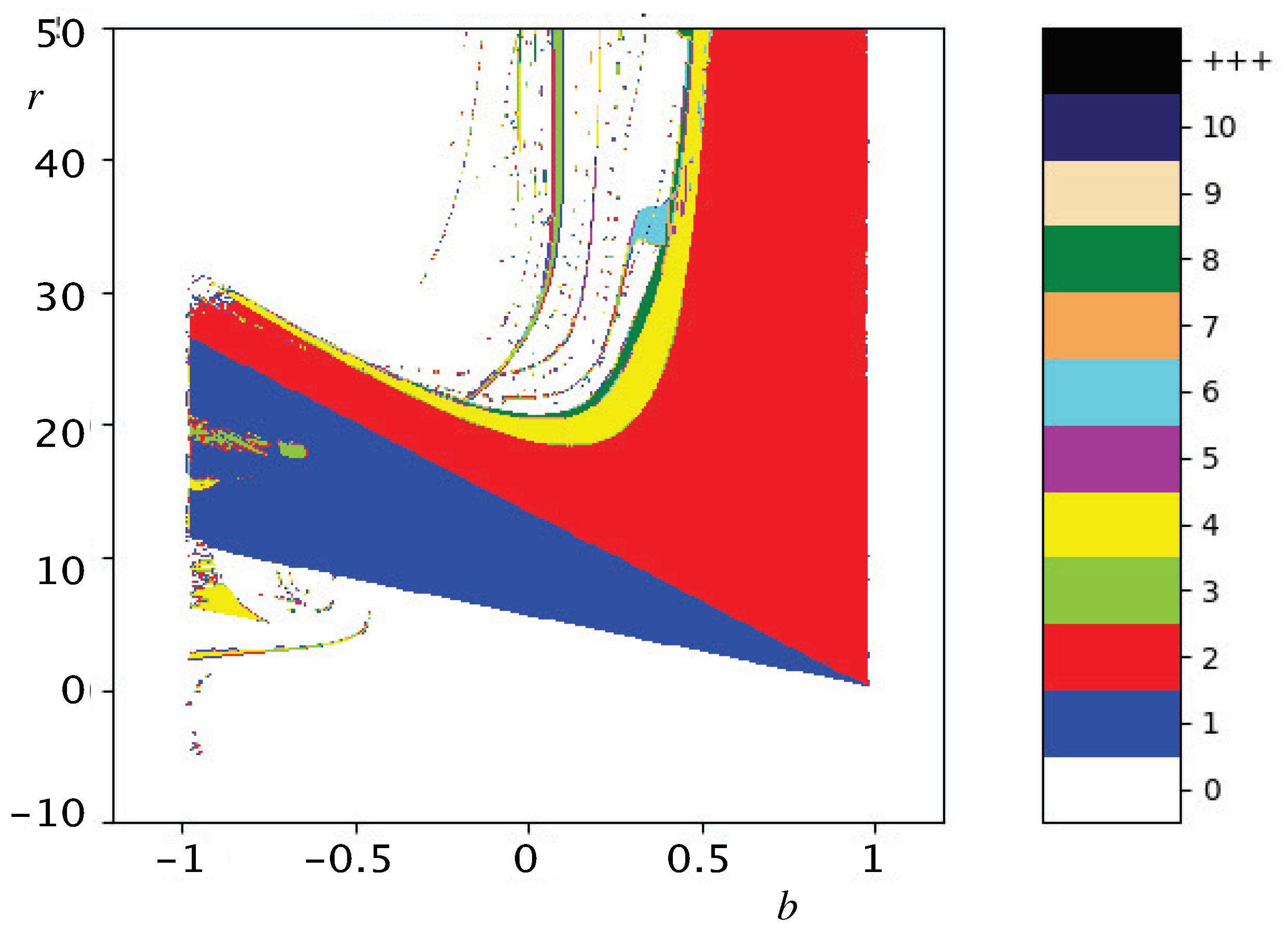
Figure 6 illustrates a bifurcation diagram of the 2D
-Ricker diffeomorphism
in the
parameter plane, at
and
. In the semi-plane
, the blue region is the stability region of the nonzero fixed points, given by Proposition 1. The red, yellow and green sequence regions correspond to the period doubling region (periods of order
, respectively), and then it follows the chaotic region. In the semi-plane
and
, another period doubling cascade is visible, correspondent to the box
, given by Equation (
51). Finally, in the semi-plane
and
, there is a slight configuration of the saddle communication area, which emerges from the cusp point
, as described above.
4.2. Case II: Parameter Plane , for
In this section, we analyze the bifurcation structures of in the parameter plane , considering the Allee effect parameter . The following results show the explicit equations for the fold and flip bifurcation curves, relative to the fixed points of .
Proposition 7. Let be the 2D γ-Ricker diffeomorphism, defined by Equation (4), and . In the space, where and are defined as in Proposition 5 (ii), with , the following properties hold true: - (i)
if , then the fold or saddle-node bifurcation relative to the fixed points of in the parameter plane is given by, with , for constant;
- (ii)
if , then the flip or period-doubling bifurcation relative to the fixed points of in the parameter plane is given by, with , for constant.
The proof of the results of Proposition 7 is similar to the proof of Proposition 6, with the respective analysis of the case .
In
Figure 7 are plotted some bifurcation curves of the 2D
-Ricker diffeomorphism
, for
and
. Similar to the results presented in
Section 2.2, concerning the existence of nontrivial fixed points of
for
(see Remark 1), the bifurcation structure of
in the
parameter plane will be analogous to the bifurcation structure of
, for
and
. In fact, we can confirm this similarity between
Figure 5 and
Figure 7 by considering the semi-plane
. The fold and flip bifurcation curves plotted have the same meaning as described above. We remark that for
there is only the bifurcation cascade associated with the box
, given by Equation (
50). The bifurcation diagram of the 2D
-Ricker diffeomorphism
, with
and
, in the
parameter plane, is represented in
Figure 8, which similarly behaves like the bifurcation diagram in
Figure 6, for the semi-plane
.
5. Discussion and Conclusions
In this work, we introduced a new 2D
-Ricker population model, defined using the diffeomorphism
, given by Equation (
4). The aim of this two-dimensional model was to understand the nonlinear dynamics in 2D of the classic 1D
-Ricker population model, through the embedding parameter
b. The first imperative question we sought to answer was about the number of fixed points of
and how to define them, since the expression for determining them is implicit. In this way, using Lambert
W functions, it was possible to define the fixed points of
as analytical solutions of these transcendental functions. Properties 3 and 4 establish conditions on the parameters space
for which the Lambert
W functions admit solutions or not. Consequently, in Propositions 1 and 2, the main results of this work, established in Theorem 1, on the maximum number of fixed points of
have been proved. This study was analyzed taking into account the parity of the Allee effect parameter
, which provides significant differences.
In order to clarify the nonlinear dynamics and bifurcation structures of the 2D -Ricker diffeomorphism , an exhaustive study was carried out on the nature and stability of the fixed points of . However, due to the complexity of defining the nontrivial fixed points of using Lambert W functions, this classification has become intricate and difficult, because the eigenvalues of are also defined through Lambert W functions, for the parameter odd and even, according to the results proved in Propositions 3 and 4, and Lemma 3. Specifically, the trivial fixed point of is also recognised to have a significant role in this study, namely, in the particular cases and , as we discussed in the results presented in Lemma 2 and Corollary 1.
In the last phase of our work, we studied the bifurcation structures of the 2D -Ricker diffeomorphism in the parameter plane , considering again the parity of the Allee effect parameter . In order to complete this study, we have used the fold and flip bifurcation curves, which are defined as particular cases of contour lines related to cycles of order k of . For the numerical cases analyzed, the stability domains of the different cycles of order were determined in the respective bifurcation diagrams. Thus, the analytical and numerical implementation of these two case studies sustained the theoretical results obtained in the previous sections, in particular, the differentiation between the behaviour of this 2D population model for the Allee effect parameter odd or even. Therefore, for this model, the performance of the parameter is crucial.
This work has led us to some extremely important and complex questions for our future research. The main question concerns the analysis of the 2D -Ricker diffeomorphism , considering the Allee effect parameter . In this way, we will have to characterise the phenomenon of the Allee effect for this 2D population growth model, establishing conditions for its existence, as well as justifying what the differentiating role of the Allee effect is in the bifurcation structures of .




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}