


Developing and Evaluating the Operating Region of a Grid-Connected Current Source Inverter from Its Mathematical Model

 ,
,  ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
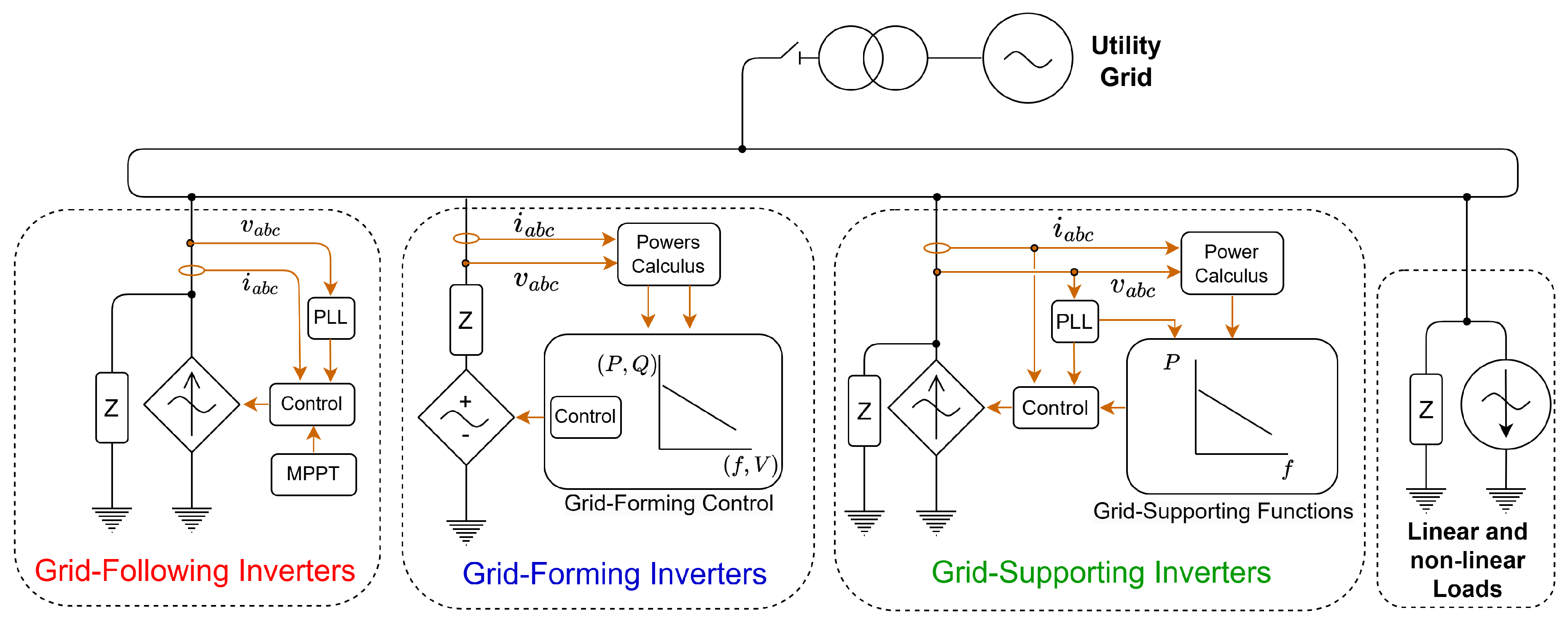
2. Grid-Forming Inverters Topologies and Control Schemes
2.1. A Brief Comparison between VSI and CSI Topologies
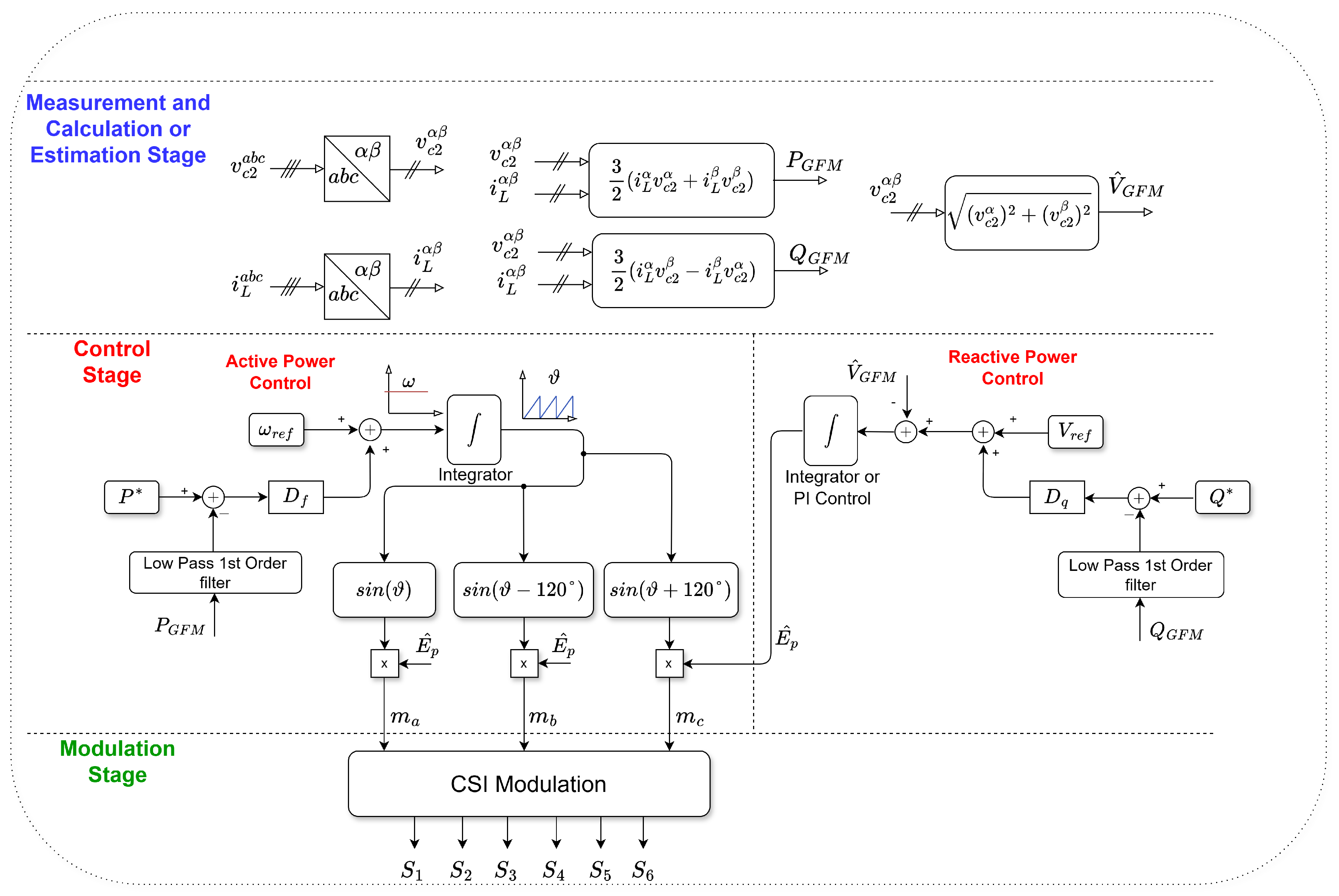
2.2. Grid-Forming Control Scheme
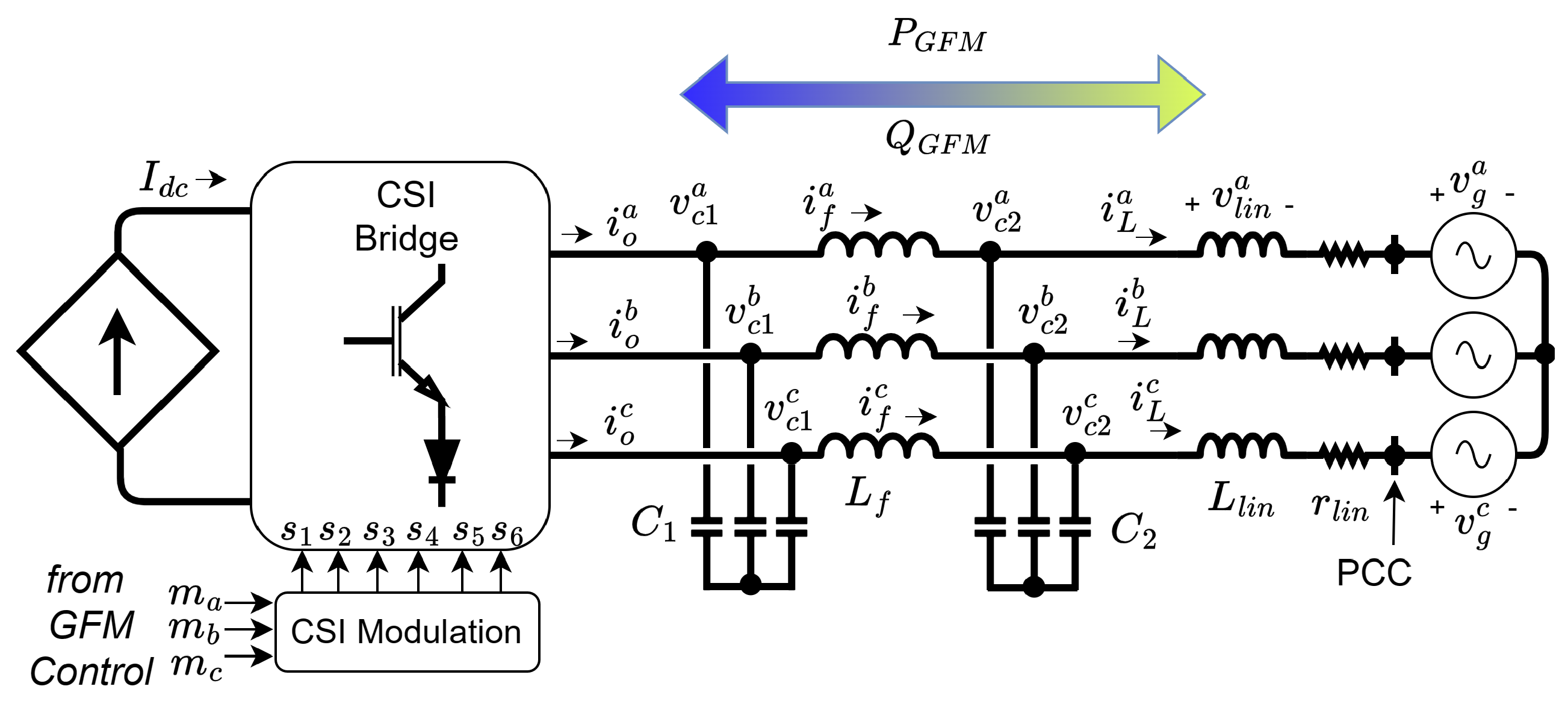
3. Modeling of a Grid-Connected CSI
3.1. Dynamic Behavior Modeling
3.2. Modeling of Steady-State Behavior
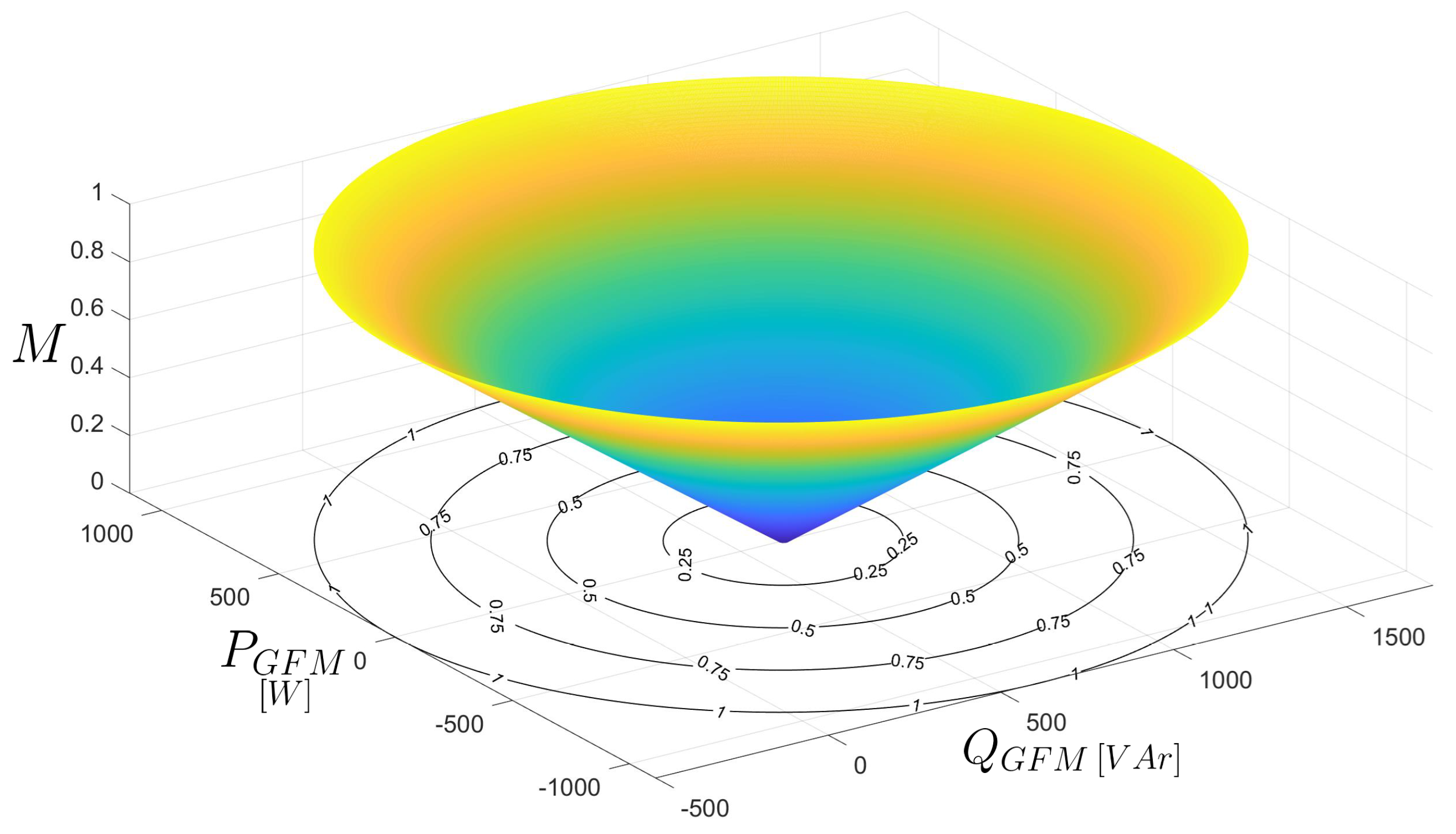
4. Operating Region of a Grid-Connected CSI
4.1. Equations to Find the Operating Region
4.2. Operating Region for a Specific Grid-Forming CSI
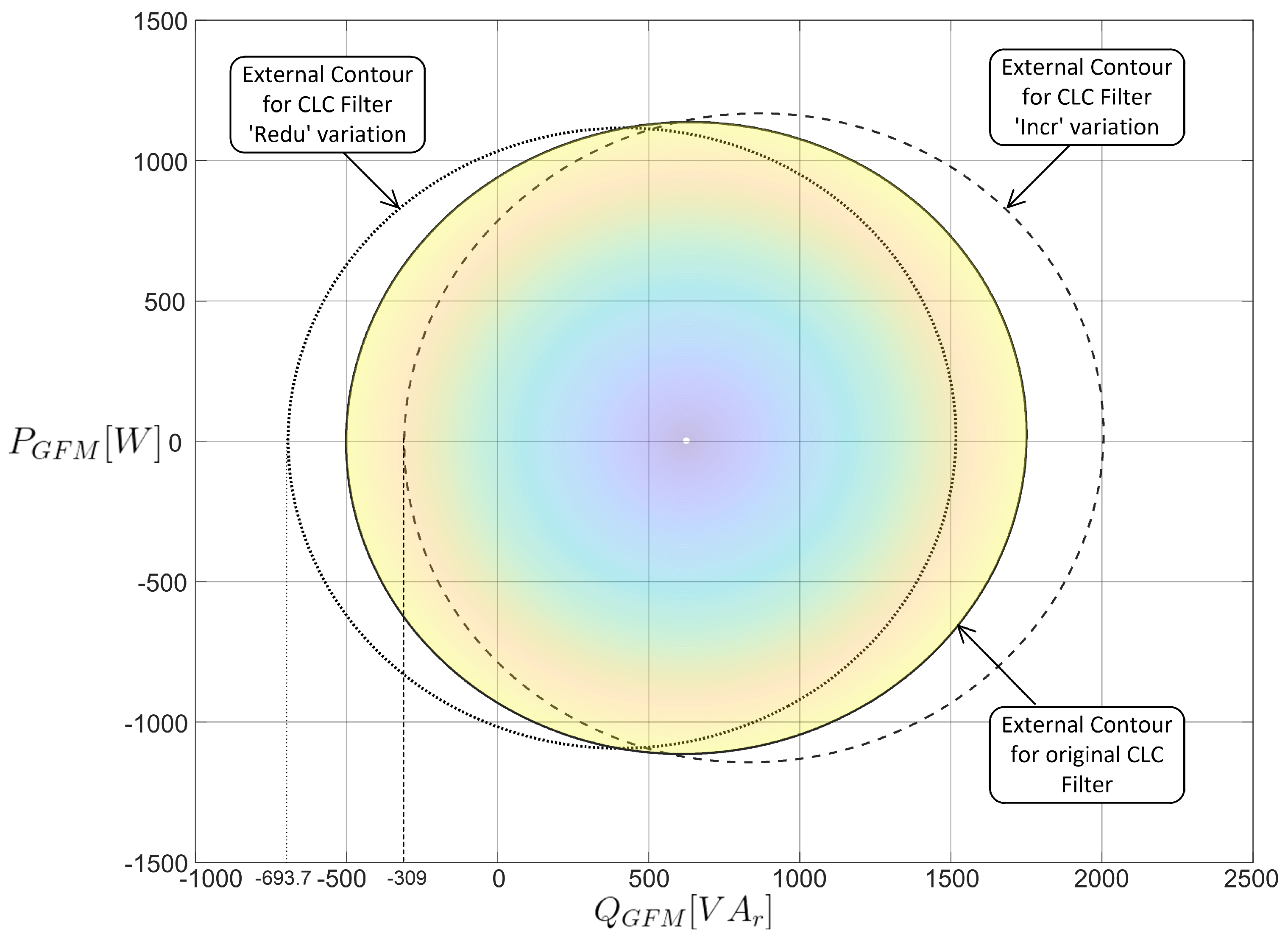
4.3. Effects of CLC Filter Design Variations on the Operating Region
5. Corroborating Results and Simulations of the Model and Operating Region
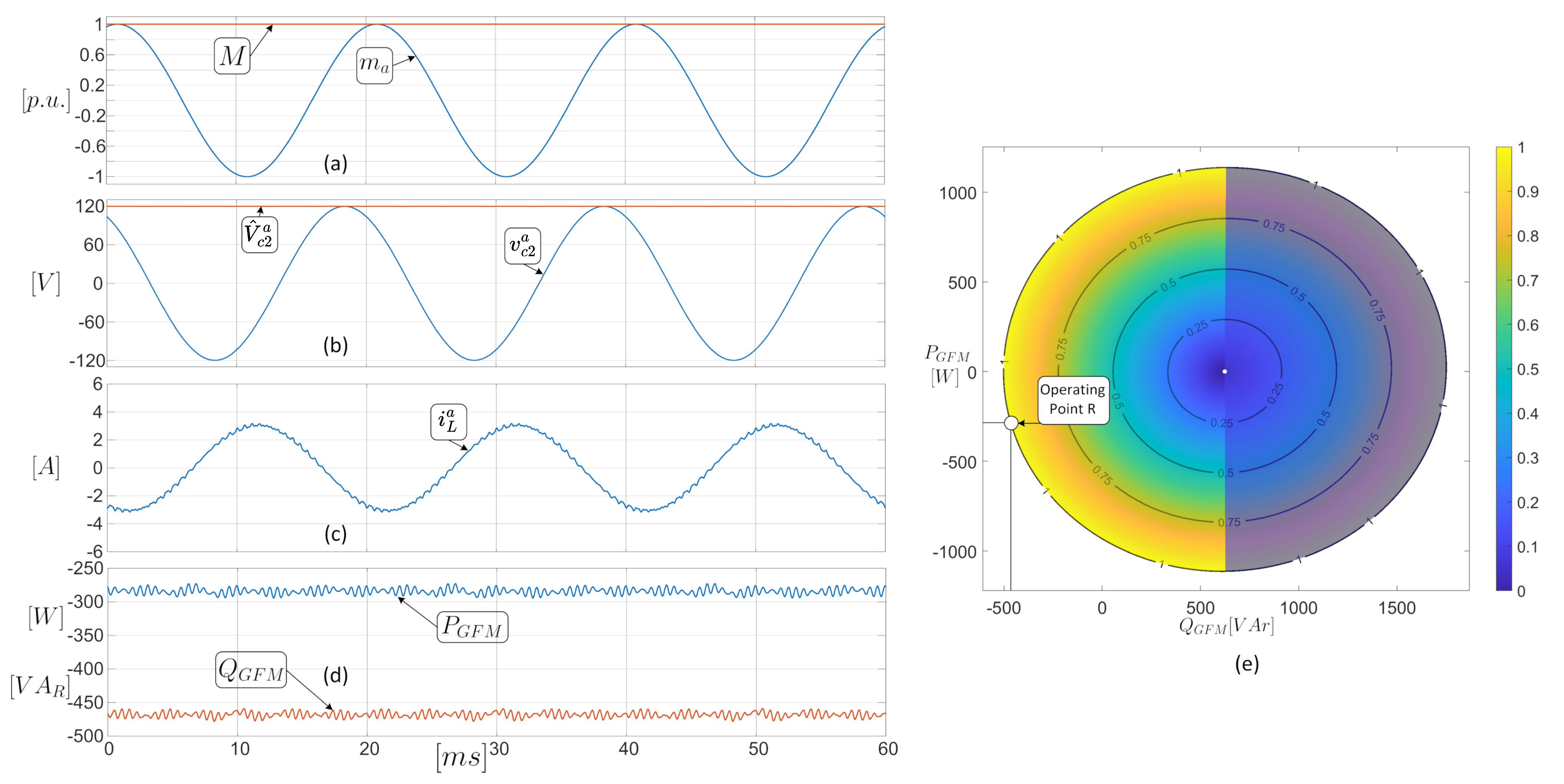
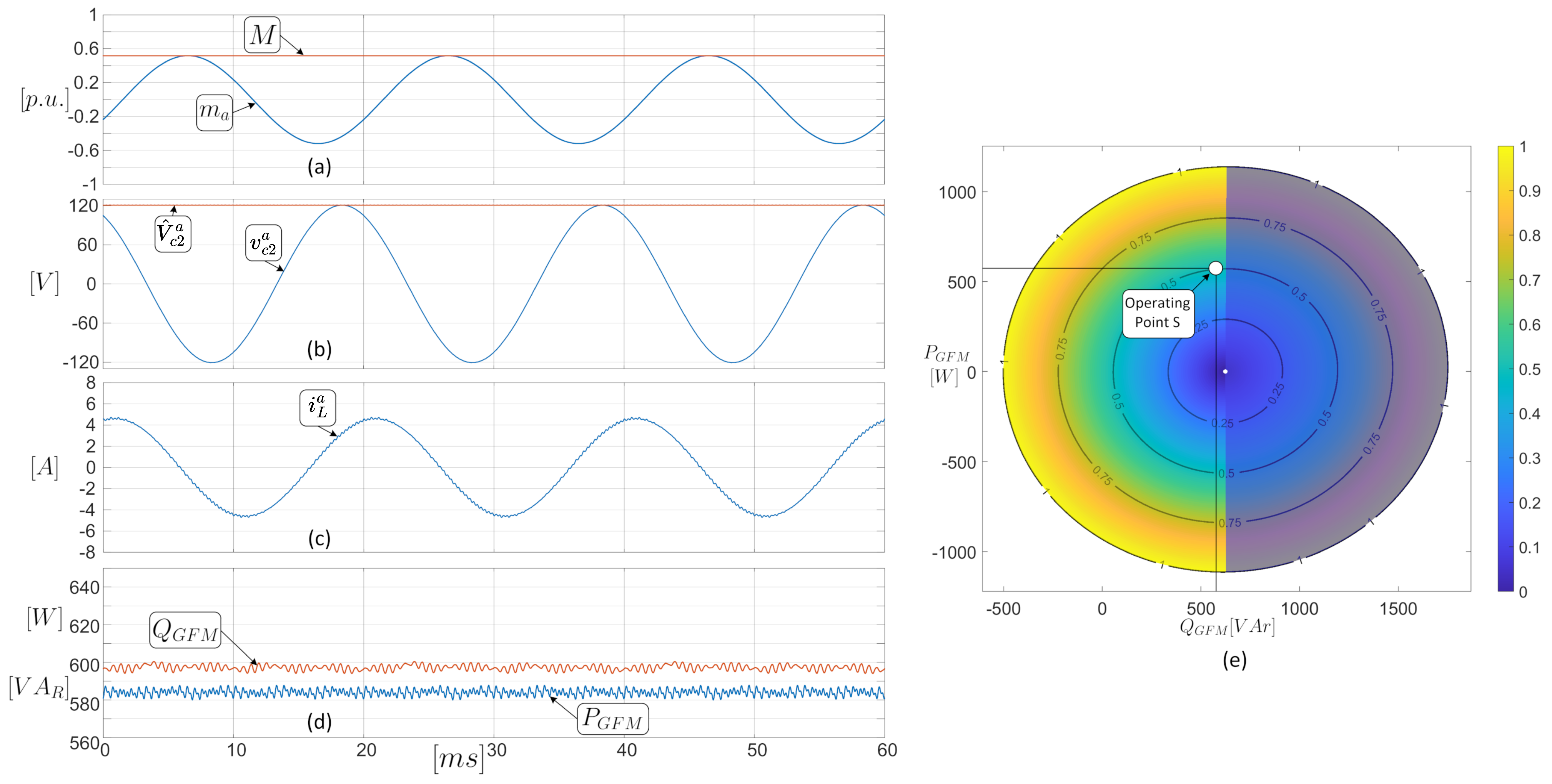
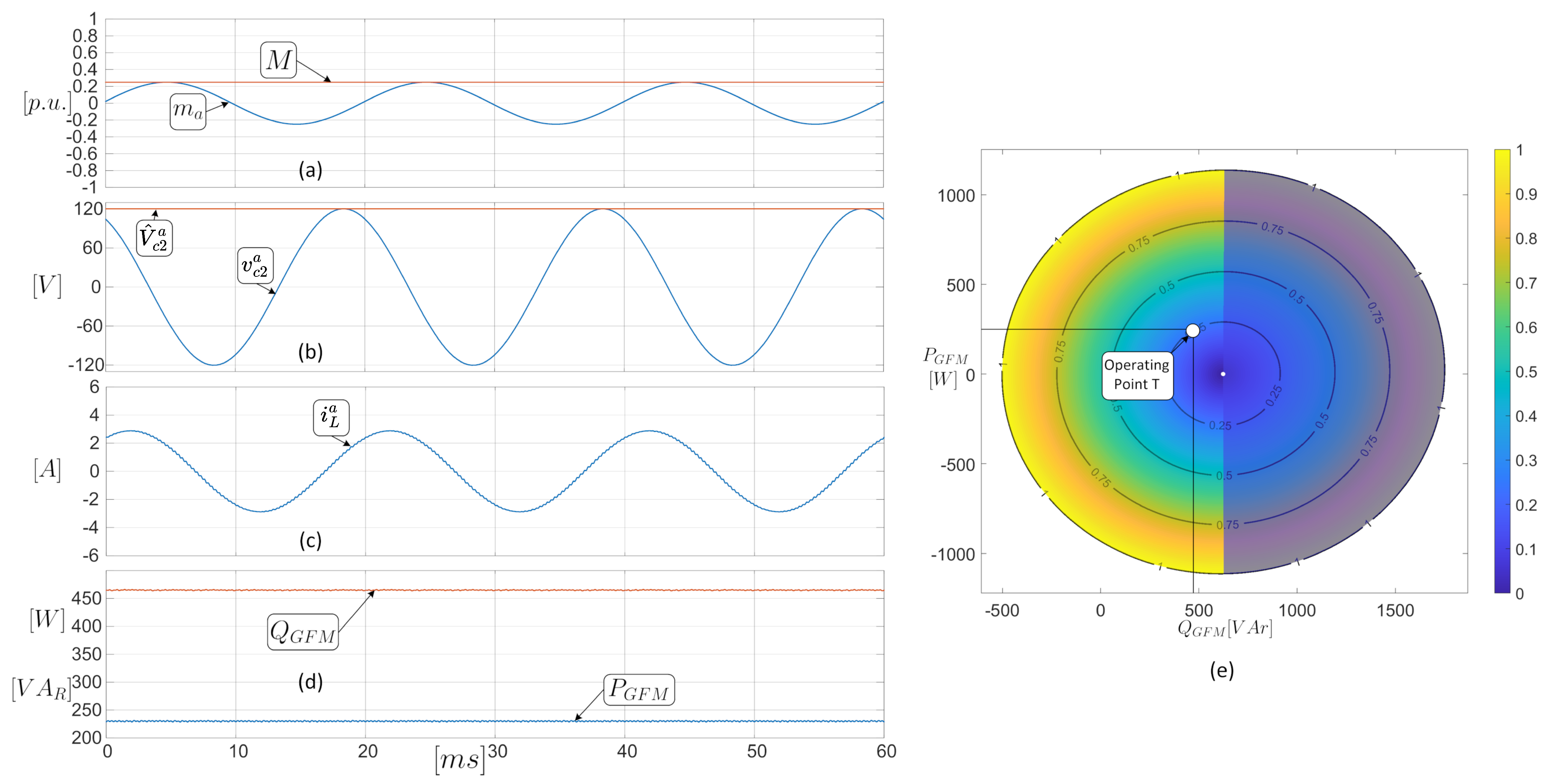
5.1. Steady State Tests
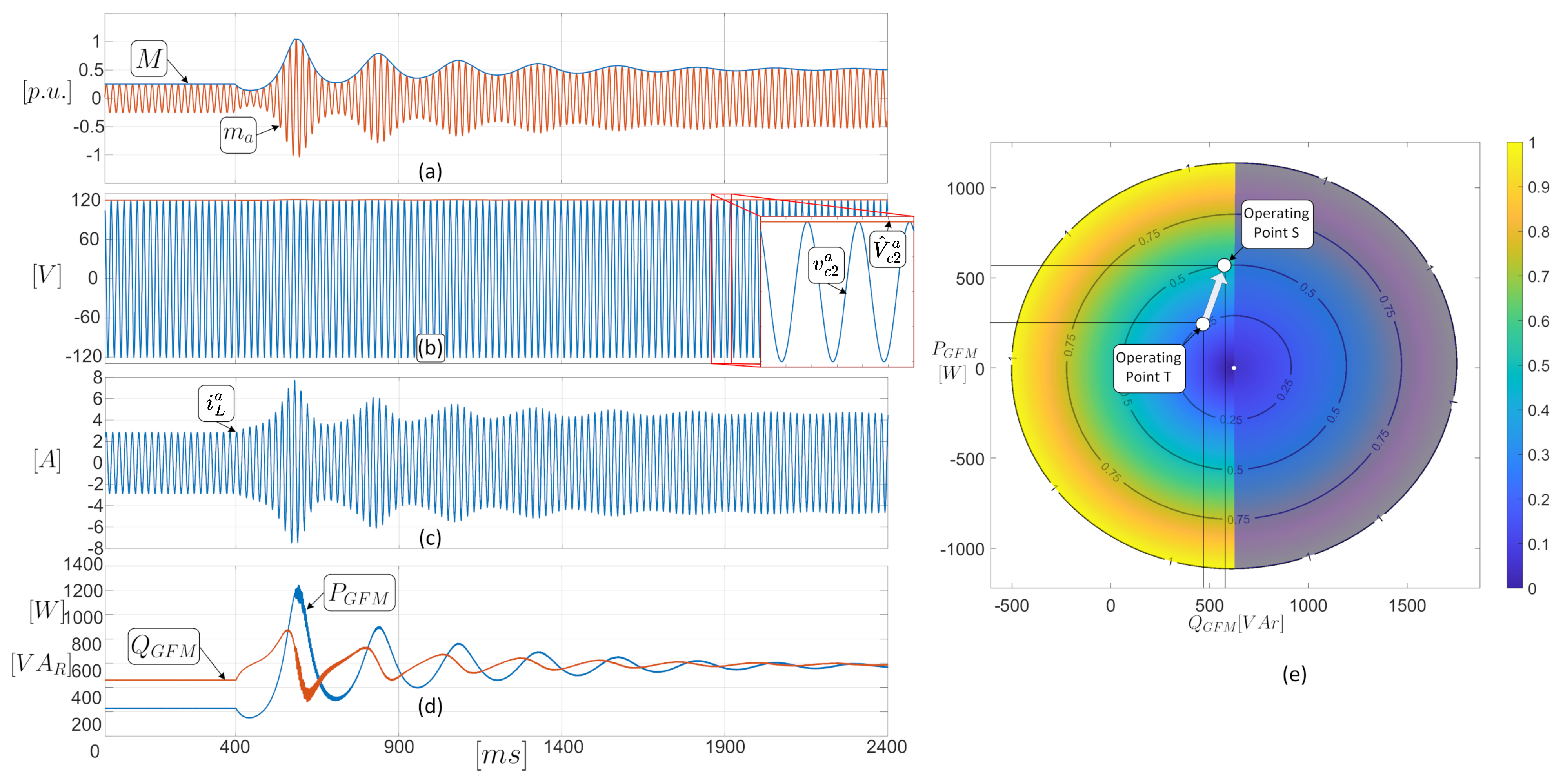
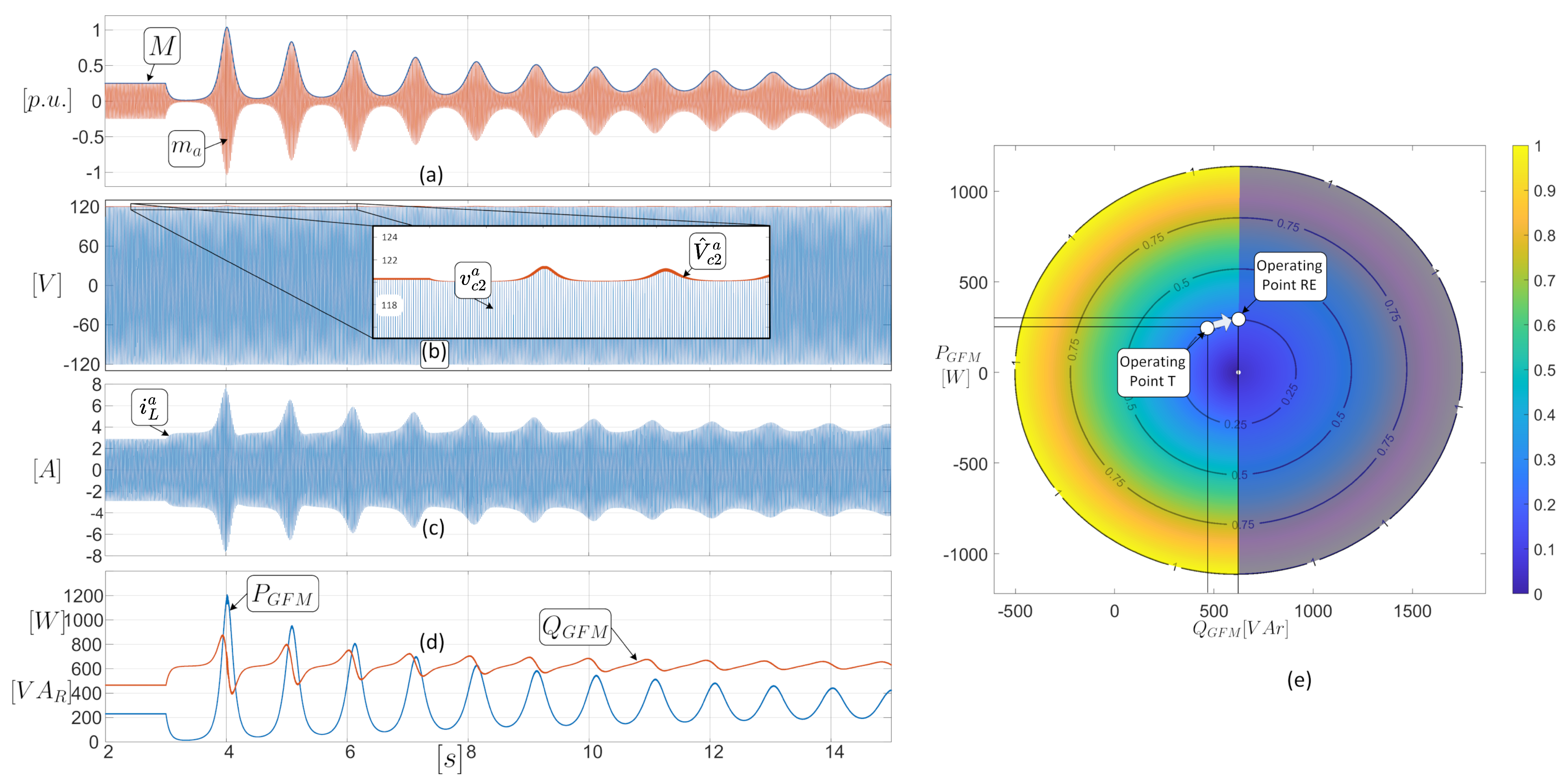
5.2. Test in Transient State
6. Discussion and Comments
6.1. Overview of Results
6.2. Enhancements from Operating Region Insights
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CSI | Current Source Inverter |
| GFM | Grid-Forming Inverter |
| GFL | Grid-Following Inverter |
| GSP | Grid-Supporting Inverter |
| VSI | Voltage Source Inverter |
| CLC | Capacitive Inductive Capacitive |
References
- Zhang, H.; Xiang, W.; Lin, W.; Wen, J. Grid Forming Converters in Renewable Energy Sources Dominated Power Grid: Control Strategy, Stability, Application, and Challenges. J. Mod. Power Syst. Clean Energy 2021, 9, 1239–1256. [Google Scholar] [CrossRef]
- Peña Asensio, A.; Arnaltes Gómez, S.; Rodriguez-Amenedo, J.L. Black-start capability of PV power plants through a grid-forming control based on reactive power synchronization. Int. J. Electr. Power Energy Syst. 2023, 146, 108730. [Google Scholar] [CrossRef]
- Sawant, J.; Seo, G.S.; Ding, F. Resilient Inverter-Driven Black Start with Collective Parallel Grid-Forming Operation. In Proceedings of the 2023 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 16–19 January 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Henninger, S.; Jaeger, J. Advanced classification of converter control concepts for integration in electrical power systems. Int. J. Electr. Power Energy Syst. 2020, 123, 106210. [Google Scholar] [CrossRef]
- Lai, N.B.; Tarrasó, A.; Baltas, G.N.; Marin Arevalo, L.V.; Rodriguez, P. External Inertia Emulation Controller for Grid-Following Power Converter. IEEE Trans. Ind. Appl. 2021, 57, 6568–6576. [Google Scholar] [CrossRef]
- Strunz, K.; Almunem, K.; Wulkow, C.; Kuschke, M.; Valescudero, M.; Guillaud, X. Enabling 100% Renewable Power Systems Through Power Electronic Grid-Forming Converter and Control: System Integration for Security, Stability, and Application to Europe. Proc. IEEE 2023, 111, 891–915. [Google Scholar] [CrossRef]
- Peng, F.Z.; Liu, C.C.; Li, Y.; Jain, A.K.; Vinnikov, D. Envisioning the Future Renewable and Resilient Energy Grids—A Power Grid Revolution Enabled by Renewables, Energy Storage, and Energy Electronics. IEEE J. Emerg. Sel. Top. Ind. Electron. 2024, 5, 8–26. [Google Scholar] [CrossRef]
- Hossain, E.; Faruque, H.M.R.; Sunny, M.S.H.; Mohammad, N.; Nawar, N. A Comprehensive Review on Energy Storage Systems: Types, Comparison, Current Scenario, Applications, Barriers, and Potential Solutions, Policies, and Future Prospects. Energies 2020, 13, 3651. [Google Scholar] [CrossRef]
- Ellis, B.E.; Pearre, N.; Swan, L. Impact of residential photovoltaic systems on net load intermittency. Renew. Energy Focus 2023, 46, 377–384. [Google Scholar] [CrossRef]
- Unruh, P.; Nuschke, M.; Strauß, P.; Welck, F. Overview on grid-forming inverter control methods. Energies 2020, 13, 2589. [Google Scholar] [CrossRef]
- Safamehr, H.; Izadi, I.; Ghaisari, J. Robust V − I Droop Control of Grid-Forming Inverters in the Presence of Feeder Impedance Variations and Nonlinear Loads. IEEE Trans. Ind. Electron. 2024, 71, 504–512. [Google Scholar] [CrossRef]
- Liu, T.; Wang, X. Unified Voltage Control for Grid-Forming Inverters. IEEE Trans. Ind. Electron. 2024, 71, 2578–2589. [Google Scholar] [CrossRef]
- Rosso, R.; Wang, X.; Liserre, M.; Lu, X.; Engelken, S. Grid-Forming Converters: Control Approaches, Grid-Synchronization, and Future Trends—A Review. IEEE Open J. Ind. Appl. 2021, 2, 93–109. [Google Scholar] [CrossRef]
- Pattabiraman, D. Current source inverter with grid forming control. Electr. Power Syst. Res. 2024, 226, 109910. [Google Scholar] [CrossRef]
- Abdel-Moneim, M.G.; Hamad, M.S.; Abdel-Khalik, A.S.; Hamdy, R.R.; Hamdan, E.; Ahmed, S. Analysis and control of split-source current-type inverter for grid-connected applications. Alex. Eng. J. 2024, 96, 268–278. [Google Scholar] [CrossRef]
- Xu, C.; Liu, P.; Miao, Y. Overlap Time Compensation and Characteristic Analysis for Current Source Photovoltaic Grid-Connected Inverter. Energies 2024, 17, 1768. [Google Scholar] [CrossRef]
- Gao, H. High-frequency common-mode voltage mitigation for current-source inverter in transformerless photovoltaic system using active zero-state space vector modulation. IET Electr. Power Appl. 2023, 17, 245–255. [Google Scholar] [CrossRef]
- Geng, Y.; Zhou, T.; Cao, F.; Xin, Y.; Wang, H. A model predictive control of three-phase grid-connected current-source inverter based on optimization theory. IET Power Electron. 2023, 16, 2650–2665. [Google Scholar] [CrossRef]
- Ray, I. Review of Impedance-Based Analysis Methods Applied to Grid-Forming Inverters in Inverter-Dominated Grids. Energies 2021, 14, 2686. [Google Scholar] [CrossRef]
- Lasseter, R.H.; Chen, Z.; Pattabiraman, D. Grid-Forming Inverters: A Critical Asset for the Power Grid. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 925–935. [Google Scholar] [CrossRef]
- Young, H.A.; Marin, V.A.; Pesce, C.; Rodriguez, J. Simple Finite-Control-Set Model Predictive Control of Grid-Forming Inverters With LCL Filters. IEEE Access 2020, 8, 81246–81256. [Google Scholar] [CrossRef]
- Geng, Y.; Yang, K.; Lai, Z.; Zheng, P.; Liu, H.; Deng, R. A Novel Low Voltage Ride Through Control Method for Current Source Grid-Connected Photovoltaic Inverters. IEEE Access 2019, 7, 51735–51748. [Google Scholar] [CrossRef]
- Alemi, P.; Wang, J.; Zhang, J.; Amini, S. Performance analysis of high-power three-phase current source inverters in photovoltaic applications. IET Circuits Devices Syst. 2021, 15, 79–87. [Google Scholar] [CrossRef]
- Fidone, G.L.; Migliazza, G.; Carfagna, E.; Benatti, D.; Immovilli, F.; Buticchi, G.; Lorenzani, E. Common Architectures and Devices for Current Source Inverter in Motor-Drive Applications: A Comprehensive Review. Energies 2023, 16, 5645. [Google Scholar] [CrossRef]
- Killeen, P.; Ghule, A.N.; Ludois, D.C. A Medium-Voltage Current Source Inverter for Synchronous Electrostatic Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1597–1608. [Google Scholar] [CrossRef]
- Migliazza, G.; Buticchi, G.; Carfagna, E.; Lorenzani, E.; Madonna, V.; Giangrande, P.; Galea, M. DC Current Control for a Single-Stage Current Source Inverter in Motor Drive Application. IEEE Trans. Power Electron. 2021, 36, 3367–3376. [Google Scholar] [CrossRef]
- Azmi, S.A.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. Comparative analysis between voltage and current source inverters in grid-connected application. In Proceedings of the IET Conference on Renewable Power Generation (RPG 2011), Edinburgh, UK, 6–8 September 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Sahan, B.; Araújo, S.V.; Nöding, C.; Zacharias, P. Comparative Evaluation of Three-Phase Current Source Inverters for Grid Interfacing of Distributed and Renewable Energy Systems. IEEE Trans. Power Electron. 2011, 26, 2304–2318. [Google Scholar] [CrossRef]
- Tan, Q.; Mao, L.; Cai, Y.; Zhang, B.; Ruan, Z. Comparative evaluation and analysis of GaN-based VSIs and CSIs. Energy Rep. 2023, 9, 568–576. [Google Scholar] [CrossRef]
- Dai, H.; Jahns, T.M.; Torres, R.A.; Han, D.; Sarlioglu, B. Comparative Evaluation of Conducted Common-Mode EMI in Voltage-Source and Current-Source Inverters using Wide-Bandgap Switches. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 788–794. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, Q. X-Type Five-Level Current Source Inverter. IEEE Trans. Power Electron. 2023, 38, 6283–6292. [Google Scholar] [CrossRef]
- Wang, Z.; Wei, Q. Γ-Type Five-Level Current Source Inverter. IEEE Trans. Power Electron. 2024, 39, 7206–7216. [Google Scholar] [CrossRef]
- Kim, J.; Cha, H. Switching Cell Current Source Inverter With Active Power Decoupling Circuit. IEEE Trans. Ind. Electron. 2024, 1–9. [Google Scholar] [CrossRef]
- Zheng, Z.; Xie, Q.; Huang, C.; Xiao, X.; Li, C. Superconducting Technology Based Fault Ride Through Strategy for PMSG-Based Wind Turbine Generator: A Comprehensive Review. IEEE Trans. Appl. Supercond. 2021, 31, 1–6. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, L.; Zou, Z.; Cheng, M. Operation of SMES for the Current Source Inverter Fed Distributed Power System Under Islanding Mode. IEEE Trans. Appl. Supercond. 2013, 23, 5700404. [Google Scholar] [CrossRef]
- Hassan, M.u.; Emon, A.I.; Luo, F.; Solovyov, V. Design and Validation of a 20-kVA, Fully Cryogenic, Two-Level GaN-Based Current Source Inverter for Full Electric Aircrafts. IEEE Trans. Transp. Electrif. 2022, 8, 4743–4759. [Google Scholar] [CrossRef]
- Potdukhe, K.C.; Munshi, A.P.; Munshi, A.A. Reliability prediction of new improved current source inverter (CSI) topology for transformer-less grid connected solar system. In Proceedings of the 2015 IEEE Power, Communication and Information Technology Conference (PCITC), Bhubaneswar, India, 15–17 October 2015; pp. 373–378. [Google Scholar] [CrossRef]
- Marignetti, F.; Di Stefano, R.L.; Rubino, G.; Giacomobono, R. Current Source Inverter (CSI) Power Converters in Photovoltaic Systems: A Comprehensive Review of Performance, Control, and Integration. Energies 2023, 16, 7319. [Google Scholar] [CrossRef]
- Mustafeez-Ul-Hassan; Emon, A.I.; Yuan, Z.; Peng, H.; Luo, F. Performance Comparison and Modelling of Instantaneous Current Sharing Amongst GaN HEMT Switch Configurations for Current Source Inverters. In Proceedings of the 2022 IEEE Applied Power Electronics Conference and Exposition (APEC), Houston, TX, USA, 20–24 March 2022; pp. 2014–2020. [Google Scholar] [CrossRef]
- Lin, Y.; Eto, J.H.; Johnson, B.B.; Flicker, J.D.; Lasseter, R.H.; Pico, H.N.V.; Seo, G.S.; Pierre, B.J.; Ellis, A.; Miller, J.; et al. Pathways to the Next-Generation Power System with Inverter-Based Resources: Challenges and recommendations. IEEE Electrif. Mag. 2022, 10, 10–21. [Google Scholar] [CrossRef]
- Tamrakar, U.; Shrestha, D.; Maharjan, M.; Bhattarai, B.P.; Hansen, T.M.; Tonkoski, R. Virtual Inertia: Current Trends and Future Directions. Appl. Sci. 2017, 7, 654. [Google Scholar] [CrossRef]
- Melin, P.E.; Espinoza, J.R.; Zargari, N.R.; Sanchez, M.A.; Guzman, J.I. Modeling Issues in Three-Phase Current Source Rectifiers that use Damping Resistors. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Paris, France, 7–10 November 2006; Volume 2, pp. 1247–1252. [Google Scholar] [CrossRef]
- Basler, M.J.; Schaefer, R.C. Understanding Power-System Stability. IEEE Trans. Ind. Appl. 2008, 44, 463–474. [Google Scholar] [CrossRef]
- Shuai, Z.; Shen, C.; Liu, X.; Li, Z.; Shen, Z.J. Transient Angle Stability of Virtual Synchronous Generators Using Lyapunov’s Direct Method. IEEE Trans. Smart Grid 2019, 10, 4648–4661. [Google Scholar] [CrossRef]
- Ippolito, M.G.; Musca, R.; Zizzo, G. Generalized power-angle control for grid-forming converters: A structural analysis. Sustain. Energy Grids Netw. 2022, 31, 100696. [Google Scholar] [CrossRef]
- Geng, Y.; Song, X.; Zhang, X.; Yang, K.; Liu, H. Stability Analysis and Key Parameters Design for Grid-Connected Current-Source Inverter with Capacitor-Voltage Feedback Active Damping. IEEE Trans. Power Electron. 2021, 36, 7097–7111. [Google Scholar] [CrossRef]
- Riegler, B.; Muetze, A. Passive Component Optimization for Current-Source-Inverters. IEEE Trans. Ind. Appl. 2023, 59, 6113–6124. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topology | Advantages | Disadvantages |
|---|---|---|
| VSI |
|
|
| CSI |
|
|
| Parameter or Variable | Description | Values |
|---|---|---|
| DC Source Current | ||
| Filter capacitor 1 | F | |
| Filter capacitor 2 | F | |
| Filter inductance | 5 m H | |
| Modulation gain | ||
| Output magnitude voltage | 120 V |
| Operating Point Name | Active Power () | Reactive Power () |
|---|---|---|
| Test Point R | ||
| Test Point S | ||
| Test Point T | ||
| Test Point RE | ||
| Test Point OS |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baier, C.R.; Melin, P.E.; Torres, M.A.; Ramirez, R.O.; Muñoz, C.; Quinteros, A. Developing and Evaluating the Operating Region of a Grid-Connected Current Source Inverter from Its Mathematical Model. Mathematics 2024, 12, 1775. https://doi.org/10.3390/math12121775
Baier CR, Melin PE, Torres MA, Ramirez RO, Muñoz C, Quinteros A. Developing and Evaluating the Operating Region of a Grid-Connected Current Source Inverter from Its Mathematical Model. Mathematics. 2024; 12(12):1775. https://doi.org/10.3390/math12121775
Chicago/Turabian StyleBaier, Carlos R., Pedro E. Melin, Miguel A. Torres, Roberto O. Ramirez, Carlos Muñoz, and Agustin Quinteros. 2024. "Developing and Evaluating the Operating Region of a Grid-Connected Current Source Inverter from Its Mathematical Model" Mathematics 12, no. 12: 1775. https://doi.org/10.3390/math12121775
APA StyleBaier, C. R., Melin, P. E., Torres, M. A., Ramirez, R. O., Muñoz, C., & Quinteros, A. (2024). Developing and Evaluating the Operating Region of a Grid-Connected Current Source Inverter from Its Mathematical Model. Mathematics, 12(12), 1775. https://doi.org/10.3390/math12121775