
A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem

 , ,
, ,  , and
, and 
Abstract
1. Introduction
2. Related Work
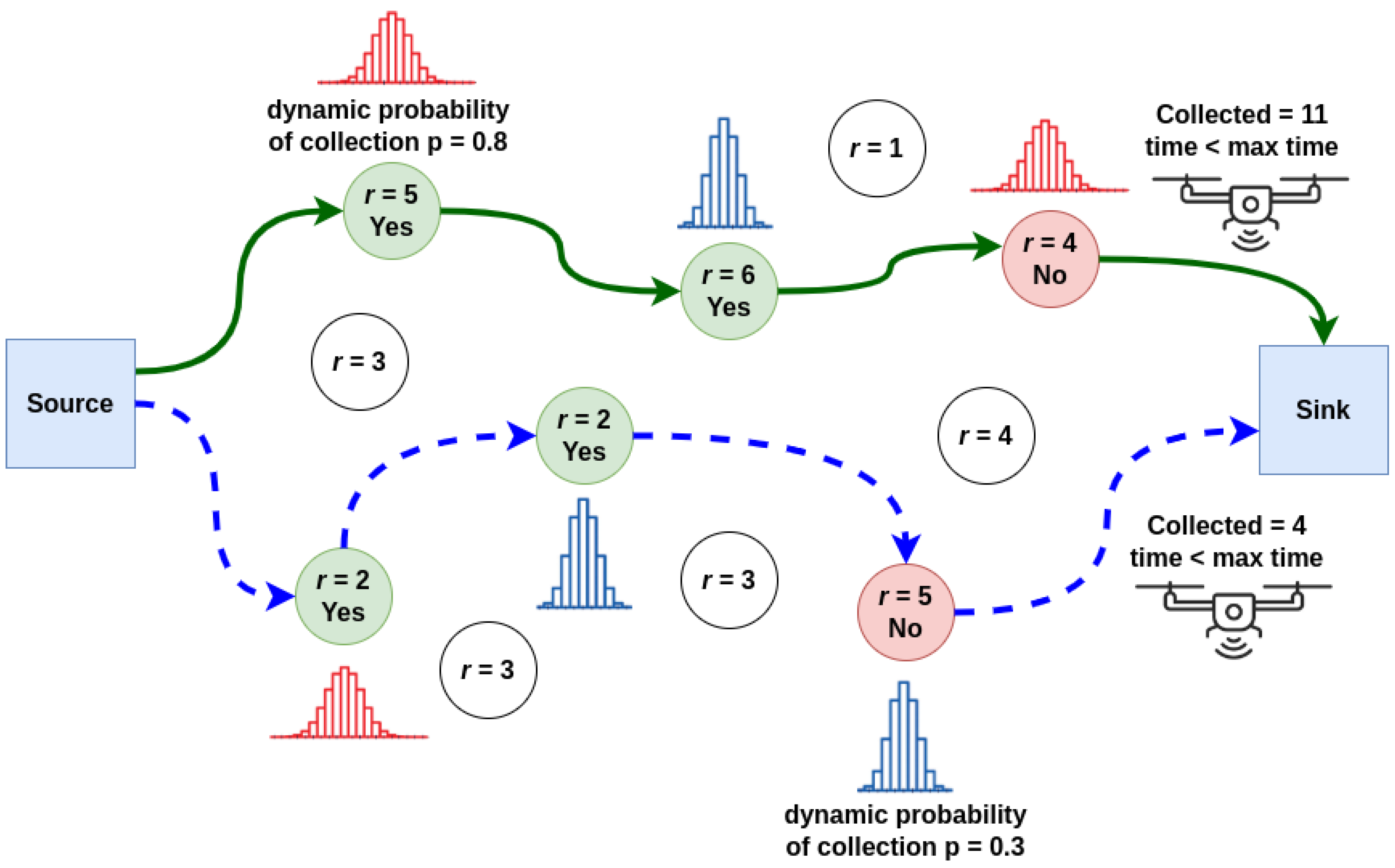
3. Describing the DTOP
3.1. An Illustrative Example of the DTOP
3.2. A Mathematical Model for the DTOP
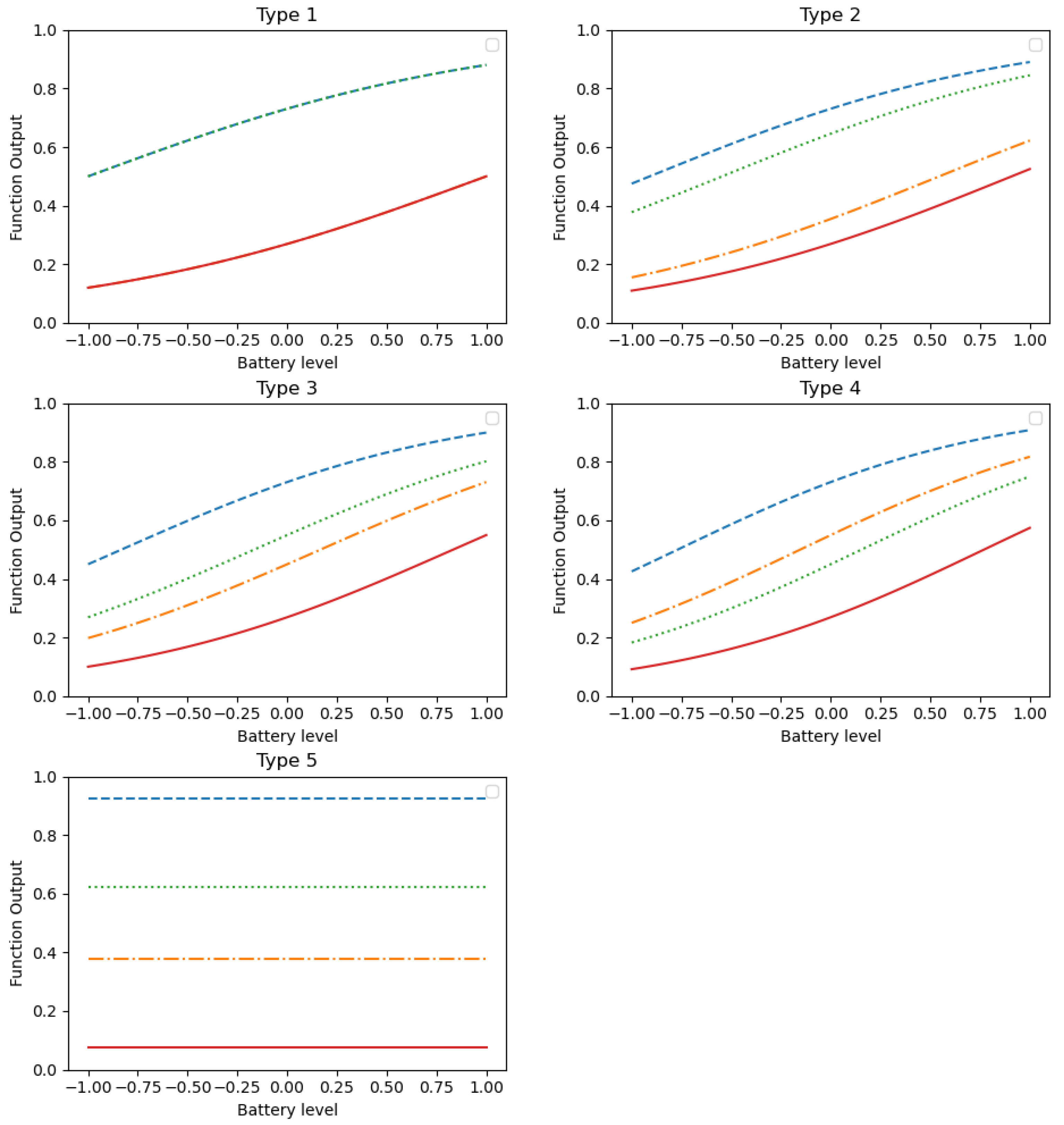
4. Modeling Probabilities of Reward for Different Types of Nodes
- Parameter implies the meteorological conditions: a value 0 denotes good meteorological conditions, whereas a value 1 expresses bad ones.
- Parameter represents the congestion level in the urban network: a value 1 denotes severe congestion on the node, whereas a value 0 expresses the lack of it.
- Parameter indicates the remaining battery percentage of an electric vehicle: a value 1 denotes that the battery is full of energy, whereas a value 0 express that the battery is empty.
- Coefficient acts as a baseline intercept term, representing the default scenario when all variables are at their baseline levels.
- Coefficient modulates the influence of meteorological conditions (w).
- Coefficient reflects the impact of congestion (c) at the specific node being visited.
- Coefficient adjusts the outcome based on the remaining battery percentage (b).
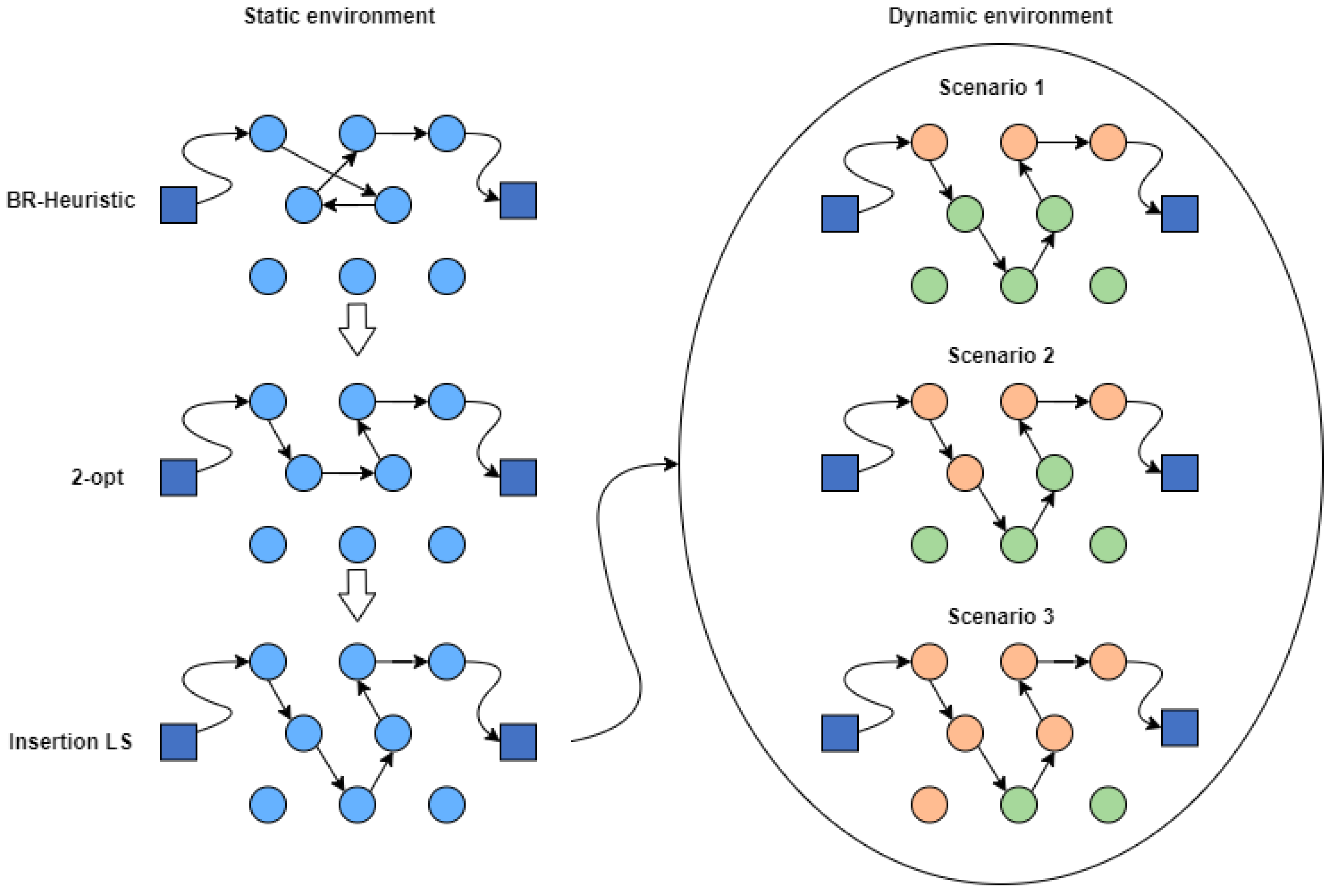
5. Solution Approaches for the Heterogeneous DTOP
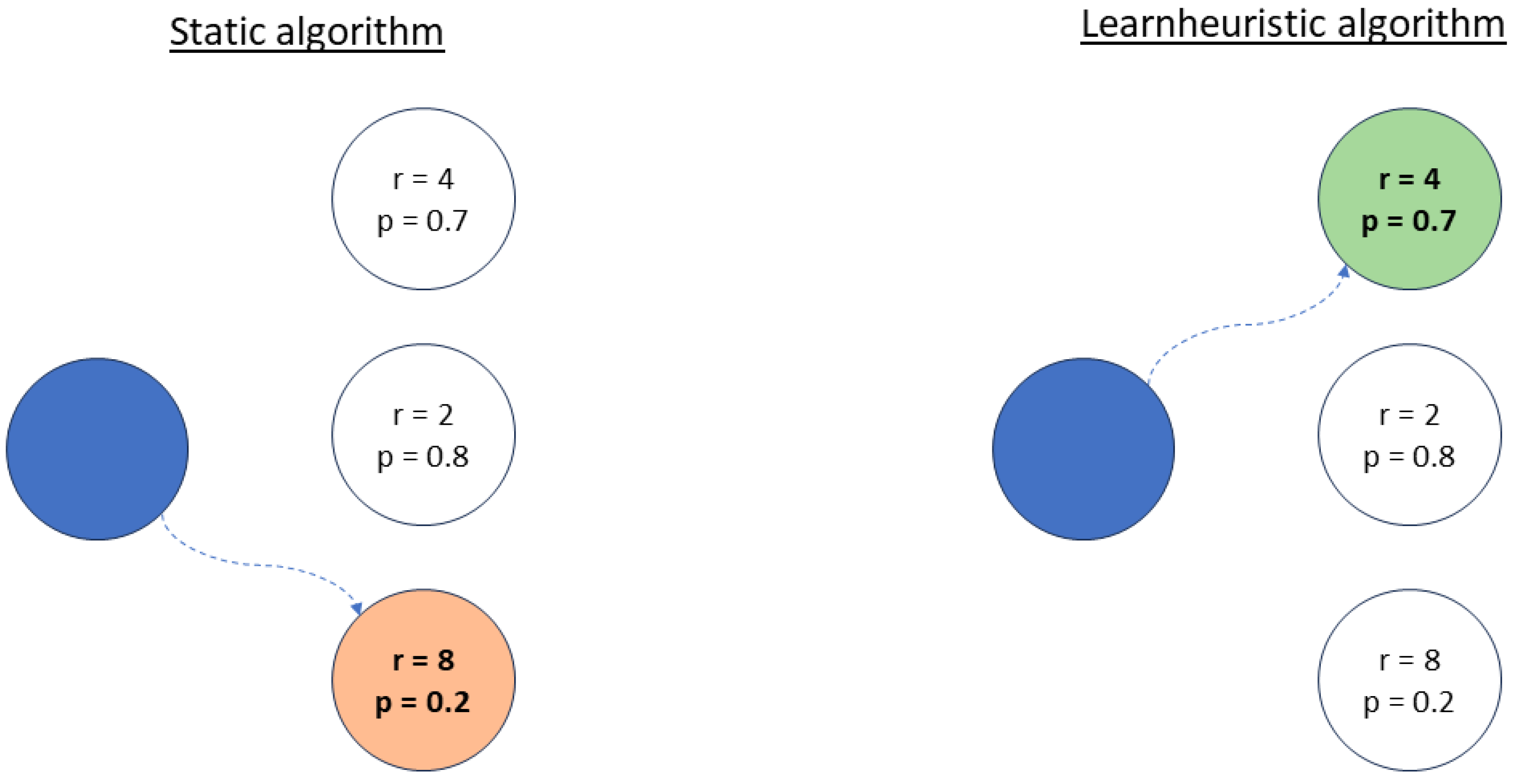
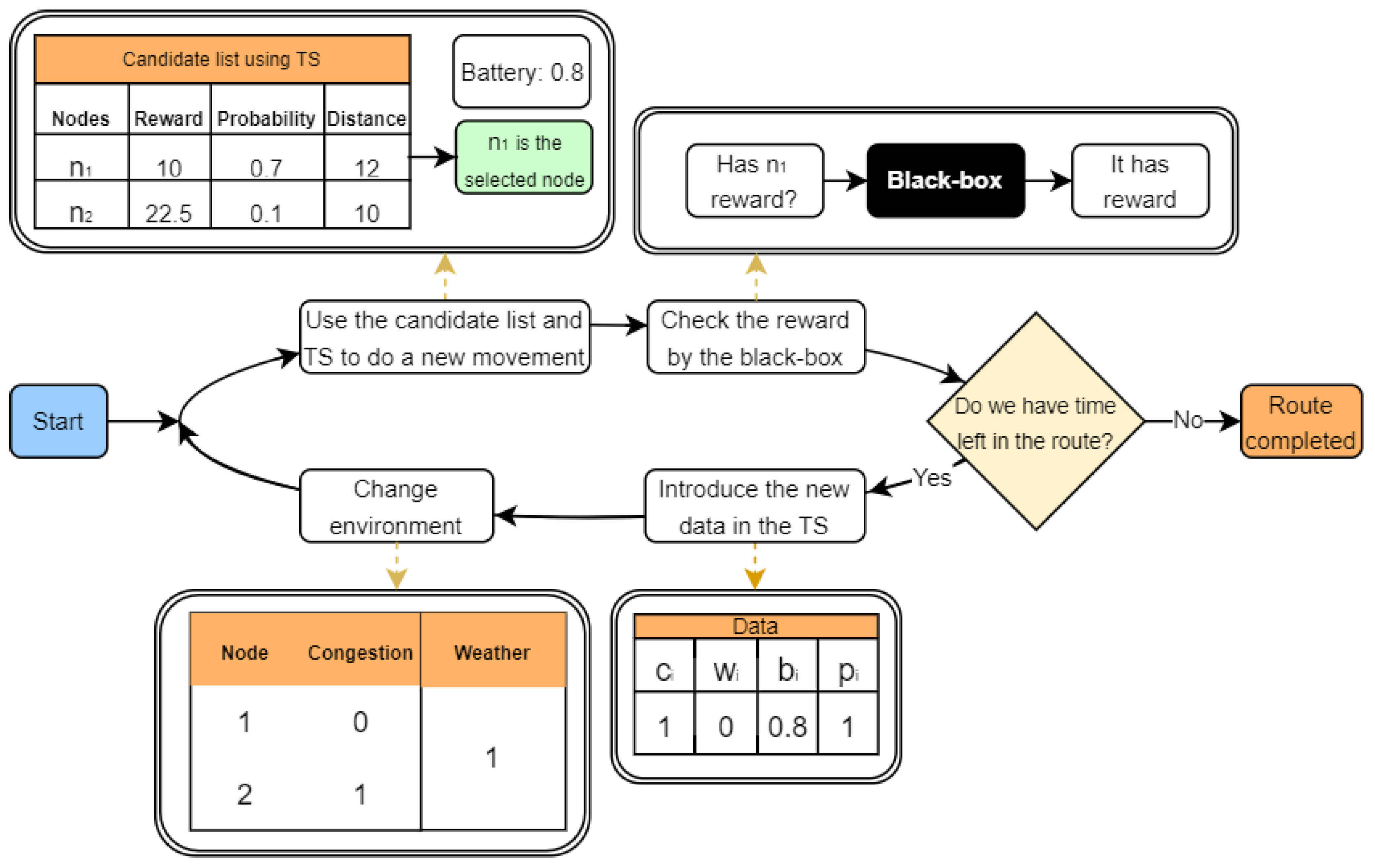
5.1. Online Contextual Thompson Sampling
5.2. A Static Constructive Heuristic
| Algorithm 1 Constructive Static Solution (, ) |
|
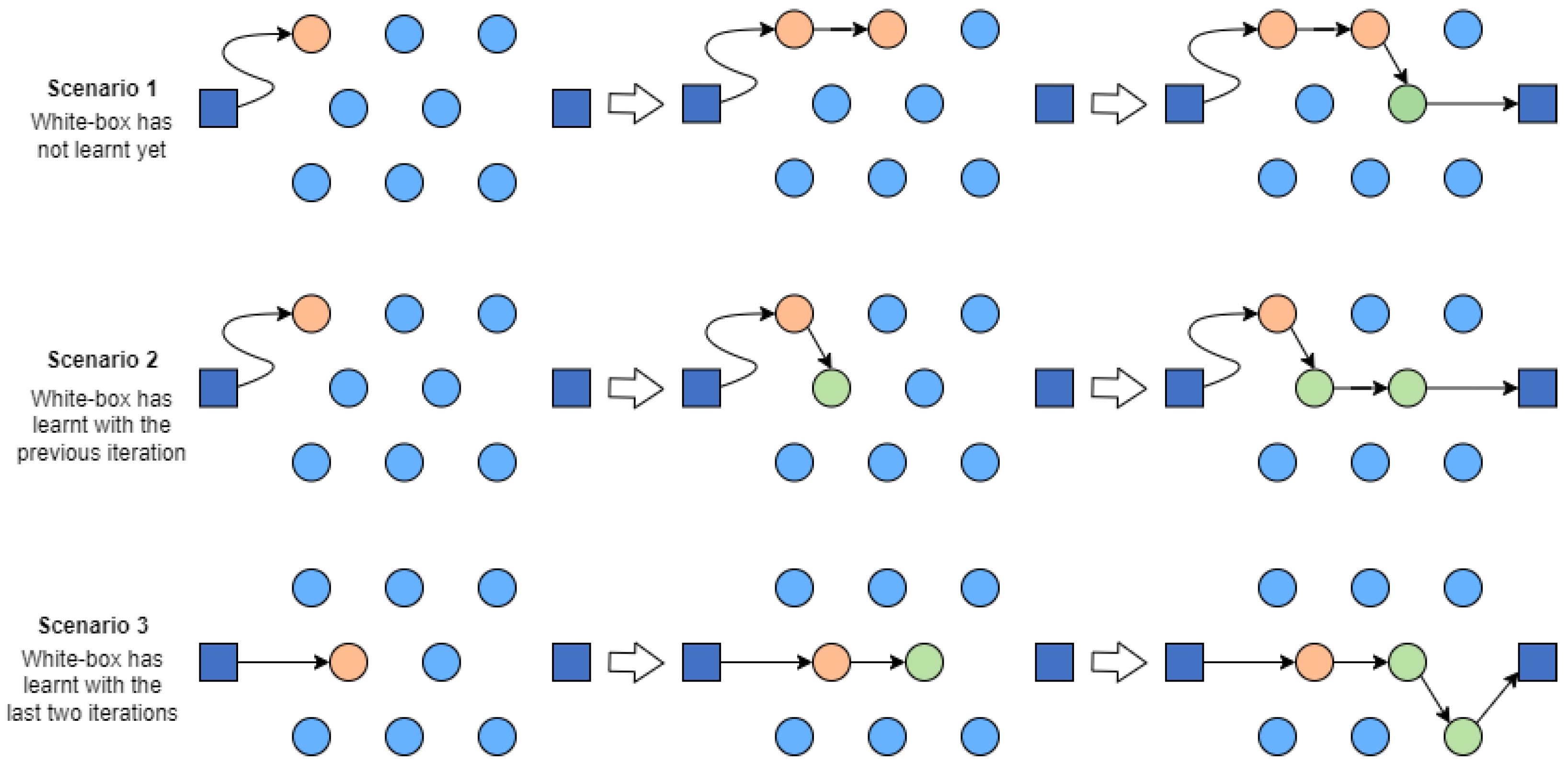
5.3. A Learnheuristic Constructive Heuristic
| Algorithm 2 Constructive Dynamic Solution (, ) |
|
6. Numerical Experiments
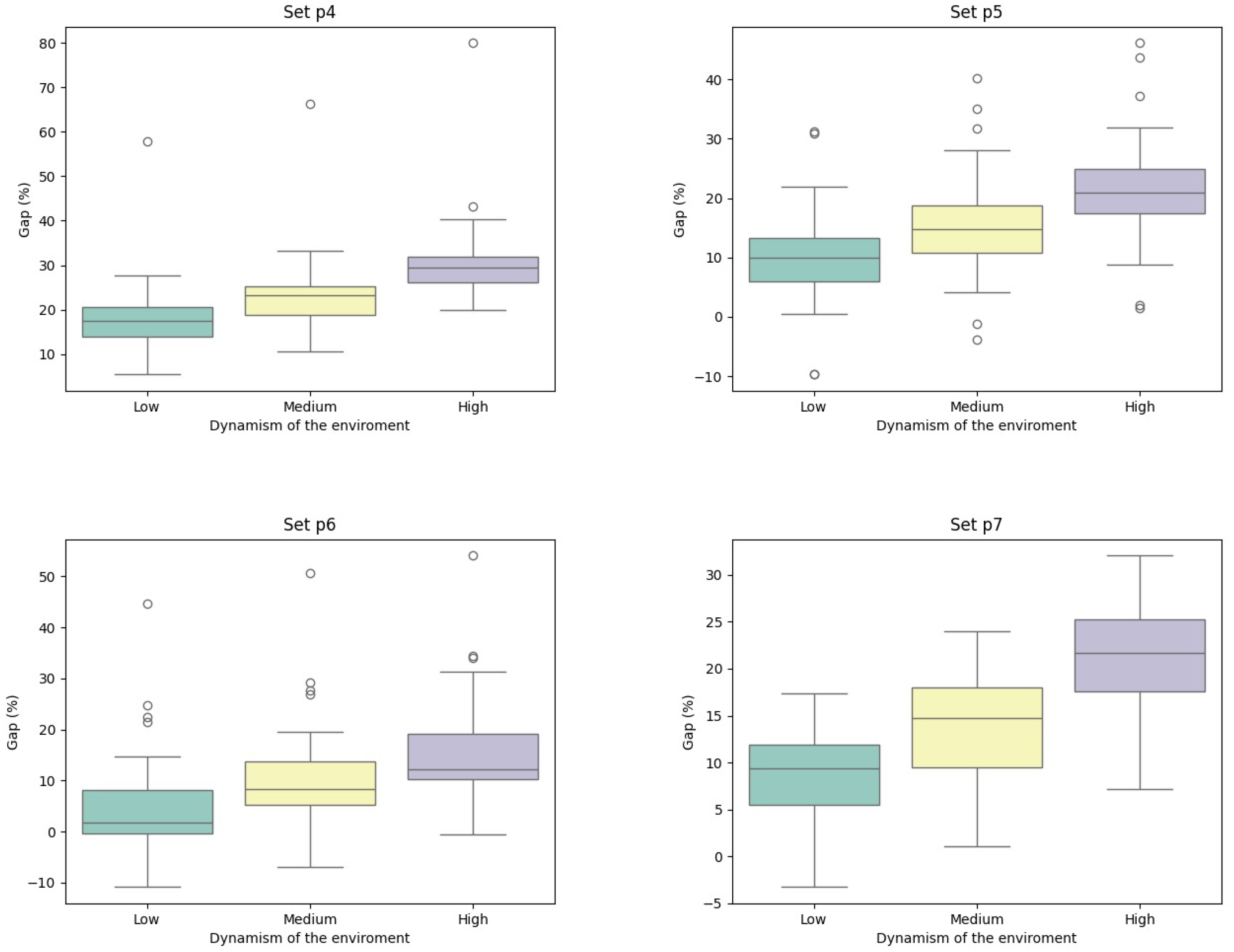
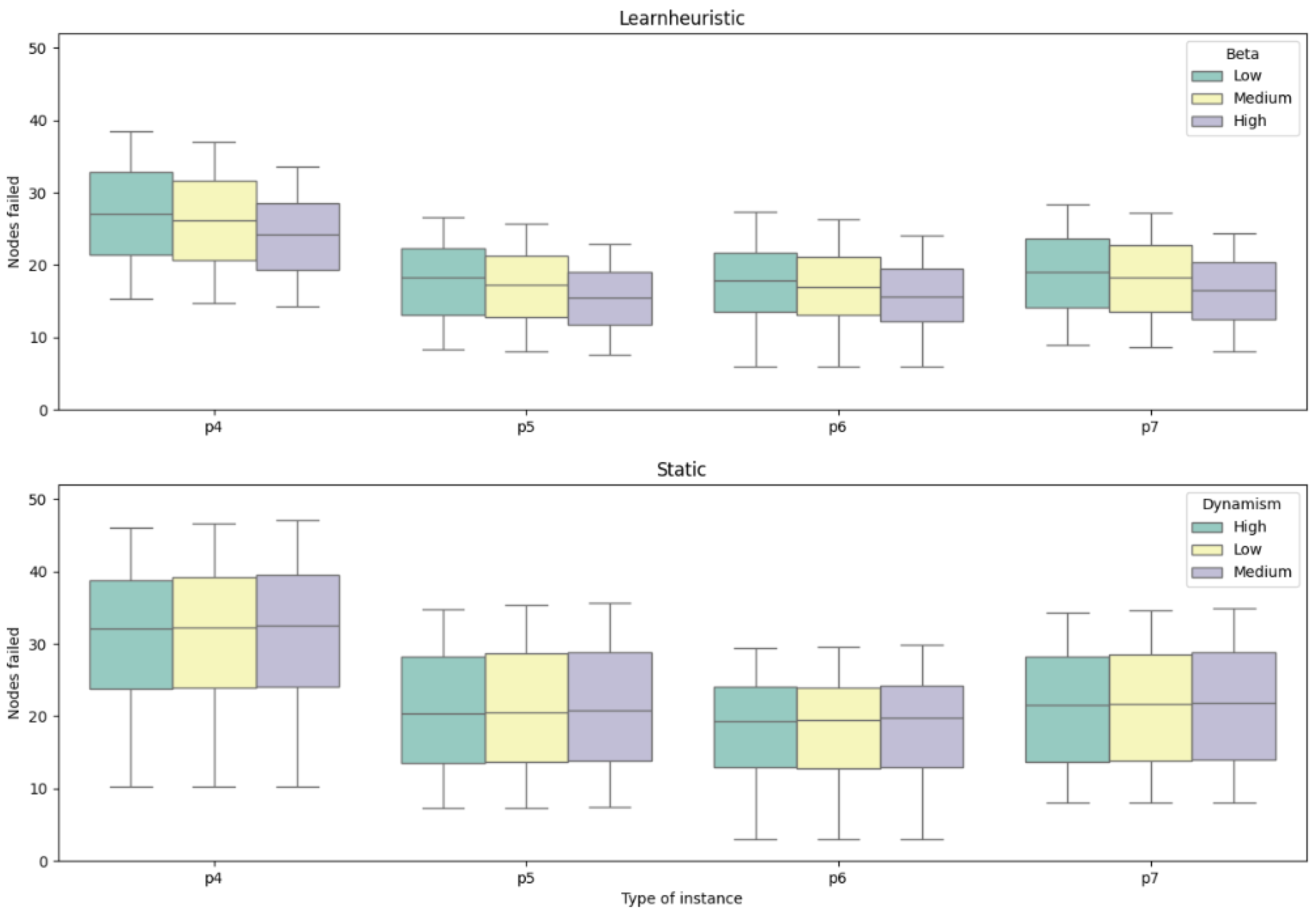
7. Analysis of Results
8. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Archetti, C.; Speranza, M.G.; Vigo, D. Chapter 10: Vehicle routing problems with profits. In Vehicle Routing: Problems, Methods, and Applications, 2nd ed.; SIAM: Philadelphia, PA, USA, 2014; pp. 273–297. [Google Scholar]
- Butt, S.E.; Cavalier, T.M. A heuristic for the multiple tour maximum collection problem. Comput. Oper. Res. 1994, 21, 101–111. [Google Scholar] [CrossRef]
- Chao, I.M.; Golden, B.L.; Wasil, E.A. The team orienteering problem. Eur. J. Oper. Res. 1996, 88, 464–474. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Souffriau, W.; Van Oudheusden, D. The orienteering problem: A survey. Eur. J. Oper. Res. 2011, 209, 1–10. [Google Scholar] [CrossRef]
- Gunawan, A.; Lau, H.C.; Vansteenwegen, P. Orienteering problem: A survey of recent variants, solution approaches and applications. Eur. J. Oper. Res. 2016, 255, 315–332. [Google Scholar] [CrossRef]
- Vansteenwegen, P.; Souffriau, W.; Berghe, G.V.; Van Oudheusden, D. Iterated local search for the team orienteering problem with time windows. Comput. Oper. Res. 2009, 36, 3281–3290. [Google Scholar] [CrossRef]
- Lin, S.W.; Vincent, F.Y. A simulated annealing heuristic for the team orienteering problem with time windows. Eur. J. Oper. Res. 2012, 217, 94–107. [Google Scholar] [CrossRef]
- Verbeeck, C.; Sörensen, K.; Aghezzaf, E.H.; Vansteenwegen, P. A fast solution method for the time-dependent orienteering problem. Eur. J. Oper. Res. 2014, 236, 419–432. [Google Scholar] [CrossRef]
- Ilhan, T.; Iravani, S.M.; Daskin, M.S. The orienteering problem with stochastic profits. Iie Trans. 2008, 40, 406–421. [Google Scholar] [CrossRef]
- Panadero, J.; Juan, A.A.; Bayliss, C.; Currie, C. Maximising reward from a team of surveillance drones: A simheuristic approach to the stochastic team orienteering problem. Eur. J. Ind. Eng. 2020, 14, 485–516. [Google Scholar] [CrossRef]
- Panadero, J.; Barrena, E.; Juan, A.A.; Canca, D. The stochastic team orienteering problem with position-dependent rewards. Mathematics 2022, 10, 2856. [Google Scholar] [CrossRef]
- Yu, Q.; Adulyasak, Y.; Rousseau, L.M.; Zhu, N.; Ma, S. Team orienteering with time-varying profit. Informs J. Comput. 2022, 34, 262–280. [Google Scholar] [CrossRef]
- Ejaz, W.; Anpalagan, A.; Ejaz, W.; Anpalagan, A. Internet of Things enabled electric vehicles in smart cities. In Internet of Things for Smart Cities: Technologies, Big Data and Security; Springer International Publishing: Cham, Switzerland, 2019; pp. 39–46. [Google Scholar]
- Martins, L.d.C.; Tordecilla, R.D.; Castaneda, J.; Juan, A.A.; Faulin, J. Electric vehicle routing, arc routing, and team orienteering problems in sustainable transportation. Energies 2021, 14, 5131. [Google Scholar] [CrossRef]
- Arnau, Q.; Juan, A.A.; Serra, I. On the use of learnheuristics in vehicle routing optimization problems with dynamic inputs. Algorithms 2018, 11, 208. [Google Scholar] [CrossRef]
- Bayliss, C.; Juan, A.A.; Currie, C.S.; Panadero, J. A learnheuristic approach for the team orienteering problem with aerial drone motion constraints. Appl. Soft Comput. 2020, 92, 106280. [Google Scholar] [CrossRef]
- Macrina, G.; Pugliese, L.D.P.; Guerriero, F.; Laporte, G. Drone-aided routing: A literature review. Transp. Res. Part Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Rojas Viloria, D.; Solano-Charris, E.L.; Muñoz-Villamizar, A.; Montoya-Torres, J.R. Unmanned aerial vehicles/drones in vehicle routing problems: A literature review. Int. Trans. Oper. Res. 2021, 28, 1626–1657. [Google Scholar] [CrossRef]
- Peyman, M.; Martin, X.A.; Panadero, J.; Juan, A.A. A Sim-Learnheuristic for the Team Orienteering Problem: Applications to Unmanned Aerial Vehicles. Algorithms 2024, 17, 200. [Google Scholar] [CrossRef]
- Mufalli, F.; Batta, R.; Nagi, R. Simultaneous sensor selection and routing of unmanned aerial vehicles for complex mission plans. Comput. Oper. Res. 2012, 39, 2787–2799. [Google Scholar] [CrossRef]
- Lee, D.H.; Ahn, J. Multi-start team orienteering problem for UAS mission re-planning with data-efficient deep reinforcement learning. Appl. Intell. 2024, 54, 4467–4489. [Google Scholar] [CrossRef]
- Sundar, K.; Sanjeevi, S.; Montez, C. A branch-and-price algorithm for a team orienteering problem with fixed-wing drones. Euro J. Transp. Logist. 2022, 11, 100070. [Google Scholar] [CrossRef]
- Poggi, M.; Viana, H.; Uchoa, E. The team orienteering problem: Formulations and branch-cut and price. In Proceedings of the 10th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS’10). Schloss Dagstuhl-Leibniz-Zentrum fuer Informatik, Liverpool, UK, 9 September 2010. [Google Scholar]
- Dang, D.C.; El-Hajj, R.; Moukrim, A. A branch-and-cut algorithm for solving the team orienteering problem. In Proceedings of the Integration of AI and OR Techniques in Constraint Programming for Combinatorial Optimization Problems: 10th International Conference, CPAIOR 2013, Yorktown Heights, NY, USA, 18–22 May 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 332–339. [Google Scholar]
- Keshtkaran, M.; Ziarati, K.; Bettinelli, A.; Vigo, D. Enhanced exact solution methods for the team orienteering problem. Int. J. Prod. Res. 2016, 54, 591–601. [Google Scholar] [CrossRef]
- Dang, D.C.; Guibadj, R.N.; Moukrim, A. A PSO-based memetic algorithm for the team orienteering problem. In Proceedings of the Applications of Evolutionary Computation: EvoApplications 2011: EvoCOMNET, EvoFIN, EvoHOT, EvoMUSART, EvoSTIM, and EvoTRANSLOG, Torino, Italy, 27–29 April 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 471–480. [Google Scholar]
- Dang, D.C.; Guibadj, R.N.; Moukrim, A. An effective PSO-inspired algorithm for the team orienteering problem. Eur. J. Oper. Res. 2013, 229, 332–344. [Google Scholar] [CrossRef]
- Muthuswamy, S.; Lam, S.S. Discrete particle swarm optimization for the team orienteering problem. Memetic Comput. 2011, 3, 287–303. [Google Scholar] [CrossRef]
- Ferreira, J.; Quintas, A.; Oliveira, J.A.; Pereira, G.A.; Dias, L. Solving the team orienteering problem: Developing a solution tool using a genetic algorithm approach. In Proceedings of the Soft Computing in Industrial Applications: Proceedings of the 17th Online World Conference on Soft Computing in Industrial Applications, Online, 3–14 December 2012; Springer: Berlin/Heidelberg, Germany, 2014; pp. 365–375. [Google Scholar]
- Bouly, H.; Dang, D.C.; Moukrim, A. A memetic algorithm for the team orienteering problem. 4OR 2010, 8, 49–70. [Google Scholar] [CrossRef]
- Archetti, C.; Hertz, A.; Speranza, M.G. Metaheuristics for the team orienteering problem. J. Heuristics 2007, 13, 49–76. [Google Scholar] [CrossRef]
- Campos, V.; Martí, R.; Sánchez-Oro, J.; Duarte, A. GRASP with path relinking for the orienteering problem. J. Oper. Res. Soc. 2014, 65, 1800–1813. [Google Scholar] [CrossRef]
- Laguna, M.; Marti, R. GRASP and path relinking for 2-layer straight line crossing minimization. Informs J. Comput. 1999, 11, 44–52. [Google Scholar] [CrossRef]
- Reyes-Rubiano, L.; Juan, A.; Bayliss, C.; Panadero, J.; Faulin, J.; Copado, P. A biased-randomized learnheuristic for solving the team orienteering problem with dynamic rewards. Transp. Res. Procedia 2020, 47, 680–687. [Google Scholar] [CrossRef]
- Li, Y.; Peyman, M.; Panadero, J.; Juan, A.A.; Xhafa, F. IoT analytics and agile optimization for solving dynamic team orienteering problems with mandatory visits. Mathematics 2022, 10, 982. [Google Scholar] [CrossRef]
- Gomez, J.F.; Uguina, A.R.; Panadero, J.; Juan, A.A. A learnheuristic algorithm for the capacitated dispersion problem under dynamic conditions. Algorithms 2023, 16, 532. [Google Scholar] [CrossRef]
- Evers, L.; Glorie, K.; Van Der Ster, S.; Barros, A.I.; Monsuur, H. A two-stage approach to the orienteering problem with stochastic weights. Comput. Oper. Res. 2014, 43, 248–260. [Google Scholar] [CrossRef]
- Osisanwo, F.; Akinsola, J.; Awodele, O.; Hinmikaiye, J.; Olakanmi, O.; Akinjobi, J. Supervised machine learning algorithms: Classification and comparison. Int. J. Comput. Trends Technol. 2017, 48, 128–138. [Google Scholar]
- Russo, D.J.; Van Roy, B.; Kazerouni, A.; Osband, I.; Wen, Z. A tutorial on Thompson sampling. Found. Trends Mach. Learn. 2018, 11, 1–96. [Google Scholar] [CrossRef]
- Thompson, W.R. On the likelihood that one unknown probability exceeds another in view of the evidence of two samples. Biometrika 1933, 25, 285–294. [Google Scholar] [CrossRef]
- Zhao, Q. Multi-Armed Bandits: Theory and Applications to Online Learning in Networks; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Gupta, A.K.; Nadarajah, S. Handbook of Beta Distribution and Its Applications; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Chapelle, O.; Li, L. An empirical evaluation of thompson sampling. Adv. Neural Inf. Process. Syst. 2011, 24, 1–9. [Google Scholar]
- Askhedkar, A.R.; Chaudhari, B.S. Multi-Armed Bandit Algorithm Policy for LoRa Network Performance Enhancement. J. Sens. Actuator Netw. 2023, 12, 38. [Google Scholar] [CrossRef]
- Jose, S.T.; Moothedath, S. Thompson sampling for stochastic bandits with noisy contexts: An information-theoretic regret analysis. arXiv 2024, arXiv:2401.11565. [Google Scholar]
- Dominguez, O.; Juan, A.A.; Faulin, J. A biased-randomized algorithm for the two-dimensional vehicle routing problem with and without item rotations. Int. Trans. Oper. Res. 2014, 21, 375–398. [Google Scholar] [CrossRef]
- Arif, T.M. Introduction to Deep Learning for Engineers: Using Python and Google Cloud Platform; Springer Nature: Berlin/Heidelberg, Germany, 2022. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node Type | Low | Medium | High | ||||||
|---|---|---|---|---|---|---|---|---|---|
| N1 | 0 | −1 | 1 | 0 | −1.2 | 1.2 | 0 | −2 | 1 |
| N2 | −0.2 | −0.8 | 1.1 | −0.4 | 1 | 1.4 | −0.6 | −1.5 | 2 |
| N3 | −0.4 | −0.6 | 1.2 | −0.6 | −0.8 | 1.6 | −1.2 | −1 | 3 |
| N4 | −0.6 | −0.4 | 1.3 | −0.8 | −0.6 | 1.8 | −1.8 | −0.8 | 4 |
| N5 | −1 | −1.5 | 0 | −1.5 | −2 | 0 | −2 | −3 | 0 |
| Instance | Static | Learnheuristic | Gap (%) | ||||||||||||||||||
| Low (1) | Medium (2) | High (3) | Low (4) | Medium (5) | High (6) | ||||||||||||||||
| Time | OF | Dyn. OF | Time | OF | Dyn. OF | Time | OF | Dyn. OF | Time | OF | Dyn. OF | Time | OF | Dyn. OF | Time | OF | Dyn. OF | (1)–(4) | (2)–(5) | (3)–(6) | |
| p4.2 | 12.07 | 901.90 | 431.54 | 12.02 | 876.17 | 428.36 | 12.03 | 901.90 | 437.75 | 23.06 | 804.40 | 492.11 | 23.00 | 800.48 | 512.88 | 22.77 | 796.39 | 551.54 | 14.04% | 19.73% | 25.99% |
| p4.3 | 10.71 | 804.40 | 384.37 | 10.64 | 804.40 | 381.14 | 10.66 | 804.40 | 388.59 | 19.71 | 728.19 | 449.91 | 19.68 | 726.84 | 464.95 | 19.57 | 724.11 | 503.12 | 17.05% | 21.99% | 29.47% |
| p4.4 | 9.30 | 677.13 | 323.75 | 9.31 | 652.40 | 321.59 | 9.24 | 652.40 | 329.19 | 16.15 | 632.55 | 389.08 | 16.12 | 632.55 | 404.64 | 16.07 | 630.45 | 436.25 | 20.18% | 25.83% | 32.52% |
| p5.2 | 4.98 | 995.00 | 460.21 | 4.99 | 995.00 | 456.15 | 4.98 | 995.00 | 470.05 | 9.59 | 808.99 | 491.18 | 9.58 | 805.59 | 509.95 | 9.59 | 804.18 | 554.34 | 6.73% | 11.79% | 17.93% |
| p5.3 | 4.53 | 843.56 | 391.34 | 4.51 | 843.56 | 387.32 | 4.49 | 843.56 | 398.28 | 8.50 | 703.94 | 430.44 | 8.48 | 700.71 | 445.13 | 8.47 | 698.28 | 480.76 | 9.99% | 14.93% | 20.71% |
| p5.4 | 4.17 | 718.94 | 331.94 | 4.16 | 718.94 | 328.33 | 4.17 | 718.94 | 337.54 | 7.49 | 607.85 | 372.75 | 7.49 | 607.20 | 386.45 | 7.49 | 602.68 | 416.14 | 12.29% | 17.70% | 23.28% |
| p6.2 | 4.84 | 868.60 | 411.58 | 4.83 | 868.60 | 406.55 | 4.84 | 868.60 | 411.90 | 9.54 | 703.31 | 424.62 | 9.53 | 704.34 | 441.83 | 9.53 | 702.32 | 476.01 | 3.17% | 8.68% | 15.56% |
| p6.3 | 4.74 | 766.58 | 363.46 | 4.71 | 766.58 | 358.49 | 4.69 | 766.58 | 364.34 | 9.08 | 670.13 | 391.32 | 9.06 | 667.54 | 403.94 | 9.06 | 662.22 | 426.72 | 7.67% | 12.68% | 17.12% |
| p6.4 | 4.37 | 664.00 | 315.66 | 4.44 | 664.00 | 310.76 | 4.42 | 664.00 | 317.22 | 8.51 | 633.14 | 354.50 | 8.52 | 631.78 | 365.79 | 8.45 | 622.72 | 384.12 | 12.31% | 17.71% | 21.09% |
| p7.2 | 82.17 | 700.16 | 332.47 | 84.15 | 700.16 | 329.20 | 84.10 | 700.16 | 335.54 | 157.27 | 581.28 | 360.32 | 157.12 | 579.53 | 373.86 | 155.19 | 570.09 | 401.66 | 8.37% | 13.57% | 19.70% |
| p7.3 | 77.82 | 650.45 | 307.38 | 77.33 | 650.45 | 304.01 | 77.41 | 650.45 | 310.06 | 136.70 | 544.72 | 335.94 | 136.43 | 543.56 | 349.74 | 135.88 | 316.64 | 469.32 | 9.29% | 15.04% | 51.37% |
| p7.4 | 67.27 | 547.23 | 259.14 | 67.15 | 547.21 | 256.89 | 67.05 | 547.21 | 262.05 | 108.88 | 472.65 | 293.58 | 109.25 | 472.42 | 306.31 | 107.99 | 467.08 | 332.55 | 13.29% | 19.24% | 26.90% |
| Average | 23.92 | 761.49 | 359.40 | 24.02 | 757.29 | 355.73 | 24.01 | 759.43 | 363.54 | 42.87 | 657.60 | 398.81 | 42.86 | 656.04 | 413.79 | 42.50 | 633.10 | 452.71 | 11.20% | 16.57% | 25.14% |
| Instance | Static | Learnheuristic | Gap (%) | ||||||||||||||||||
| Low (1) | Medium (2) | High (3) | Low (4) | Medium (5) | High (6) | (1)–(4) | (2)–(5) | (3)–(6) | |||||||||||||
| Nodes | Fails | Nodes | Fails | Nodes | Fails | Nodes | Fails | Nodes | Fails | Nodes | Fails | ||||||||||
| p4.2 | 60.62 | 33.23 | 60.62 | 33.52 | 60.62 | 32.93 | 59.62 | 27.59 | 59.19 | 26.36 | 58.71 | 23.93 | −16.97% | −21.37% | −27.33% | ||||||
| p4.3 | 56.77 | 31.65 | 56.77 | 31.94 | 56.77 | 31.47 | 56.68 | 27.19 | 56.49 | 26.36 | 56.14 | 24.11 | −14.10% | −17.48% | −23.39% | ||||||
| p4.4 | 51.33 | 29.31 | 51.33 | 29.52 | 51.33 | 29.00 | 52.76 | 26.77 | 52.71 | 25.94 | 52.46 | 24.07 | −8.66% | −12.12% | −16.99% | ||||||
| p5.2 | 38.50 | 21.61 | 38.50 | 21.78 | 38.50 | 21.29 | 36.60 | 17.05 | 36.51 | 16.23 | 36.47 | 14.50 | −21.10% | −25.46% | −31.93% | ||||||
| p5.3 | 36.48 | 20.91 | 36.48 | 21.07 | 36.48 | 20.67 | 36.07 | 17.70 | 35.99 | 16.96 | 35.92 | 15.41 | −15.34% | −19.49% | −25.45% | ||||||
| p5.4 | 34.65 | 20.39 | 34.65 | 20.53 | 34.65 | 20.17 | 35.57 | 18.52 | 35.57 | 17.87 | 35.47 | 16.38 | −9.20% | −12.98% | −18.79% | ||||||
| p6.2 | 38.50 | 21.18 | 38.50 | 21.40 | 38.50 | 21.20 | 37.89 | 17.63 | 37.85 | 16.88 | 37.78 | 15.25 | −16.75% | −21.14% | −28.05% | ||||||
| p6.3 | 39.17 | 22.00 | 39.17 | 22.26 | 39.17 | 22.03 | 40.49 | 20.63 | 40.38 | 19.92 | 40.25 | 18.67 | −6.24% | −10.53% | −15.23% | ||||||
| p6.4 | 38.13 | 21.81 | 38.13 | 22.06 | 38.13 | 21.80 | 42.89 | 23.51 | 42.87 | 22.82 | 42.59 | 21.52 | 7.83% | 3.43% | −1.28% | ||||||
| p7.2 | 41.50 | 22.95 | 41.50 | 23.13 | 41.50 | 22.72 | 39.77 | 18.43 | 39.60 | 17.67 | 39.12 | 15.78 | −19.70% | −23.60% | −30.55% | ||||||
| p7.3 | 38.54 | 21.81 | 38.54 | 21.97 | 38.54 | 21.61 | 38.64 | 19.19 | 38.52 | 18.45 | 38.23 | 16.65 | −12.03% | −16.03% | −22.93% | ||||||
| p7.4 | 35.63 | 20.70 | 35.63 | 20.84 | 35.63 | 20.49 | 37.65 | 19.87 | 37.60 | 19.21 | 37.19 | 17.52 | −3.99% | −7.83% | −14.46% | ||||||
| Average | 42.49 | 23.96 | 42.49 | 24.17 | 42.49 | 23.78 | 42.89 | 21.17 | 42.77 | 20.39 | 42.53 | 18.65 | −11.35% | −15.38% | −21.36% | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uguina, A.R.; Gomez, J.F.; Panadero, J.; Martínez-Gavara, A.; Juan, A.A. A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem. Mathematics 2024, 12, 1758. https://doi.org/10.3390/math12111758
Uguina AR, Gomez JF, Panadero J, Martínez-Gavara A, Juan AA. A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem. Mathematics. 2024; 12(11):1758. https://doi.org/10.3390/math12111758
Chicago/Turabian StyleUguina, Antonio R., Juan F. Gomez, Javier Panadero, Anna Martínez-Gavara, and Angel A. Juan. 2024. "A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem" Mathematics 12, no. 11: 1758. https://doi.org/10.3390/math12111758
APA StyleUguina, A. R., Gomez, J. F., Panadero, J., Martínez-Gavara, A., & Juan, A. A. (2024). A Learnheuristic Algorithm Based on Thompson Sampling for the Heterogeneous and Dynamic Team Orienteering Problem. Mathematics, 12(11), 1758. https://doi.org/10.3390/math12111758