1. Introduction
Delay differential equations are primarily used to describe dynamical systems that depend on current and past historical states and have important applications in physics, chemistry, engineering, economics, biology and other fields. Due to the extensive use of delay differential equations in real life, the study of their stability theory has received much attention [
1,
2,
3,
4].
Recently, Li et al. [
5] studied the chaotic behavior of the following delay difference equation:
where
and
are nonzero real parameters and
k is a positive integer.
Equation (
1) can be viewed as a discrete analogue of the following one-dimensional (or 1D) delay differential equation using the forward Euler scheme [
6,
7]
where
,
b is a real parameter and
is a delay. Equation (4) is a special case of the following Mackey–Glass equation
where
,
is the delay and
f is a 1D nonlinear function. Many applications of Equation (5) have been found in physics [
8], population dynamics [
9], physiology [
1], medicine [
2], neural control [
3] and economics [
4].
For the discrete equations of Equation (4), there should be many different forms. Correspondingly, there are also many problems to be considered. Although some good results about the chaotic behavior of discrete Equation (
1) have been presented in [
5], some other problems of the discrete version of Equation (4), such as bifurcation problems, have not been considered yet. In this paper, we will mainly study the bifurcation problems of its discrete version.
For a complicated ordinary differential equation, generally speaking, it is impossible to solve it accurately. Therefore, one often considers using a computer to derive its numerical solutions, which leads one to consider its corresponding discrete model. There are many different discrete methods and ways for an ordinary differential equation. We will utilize the method of semidiscretization to Equation (4) instead of the forward Euler scheme used in [
5,
6,
7]. For related results for the method of discretization, refer to [
8,
9].
First, without loss of generality, we can assume
in Equation (
1). In fact, by taking
, and letting
, Equation (
1) is transformed into
By resetting
a and
b by
and
respectively, Equation (4) can be rewritten as
This is just (
1) in the case of
.
Suppose that
denotes the greatest integer not exceeding
s. Consider the following change rate of (5) at the integer point
Obviously, the system (
6) has piecewise constant arguments. For
, a solution
of (
6) possesses the following features:
- (1)
is continuous on ;
- (2)
exists everywhere when except for the points .
For any
with
, integrating (
6) from
n to
t, one obtains the following equation:
Letting
in (
7) leads to
which can be viewed as a discrete form of (5), a delay difference equation.
We are now in a position to change the delay difference Equation (
8) into a discrete system. Using the transformation
one has
which is a discrete version of system (
1), and where the parameters
In this paper, our main aim is to consider the dynamics of the discrete system (
10), namely, for its bifurcation problems except its stability. There have been some studies that consider Neimark–Sacker bifurcation in discrete mathematical models [
8,
9], whereas less is known about Neimark–Sacker bifurcation occurring in delay difference equations. In order to study the stability and local bifurcation of fixed points, we need a definition [
8] and a key lemma [
6]. For readers’ convenience, we list them in the
Appendix A.
The rest of this paper is organized as follows. In
Section 2, we analyze the existence and stability of fixed points of system (
10). In
Section 3, we discuss its Neimark–Sacker bifurcation. In
Section 4, we present some numerical simulations to illustrate the corresponding theoretical analysis results. Finally, we discuss and draw some conclusions in
Section 5.
2. Existence and Stability of Fixed Points
In this section, we study the existence and stability of fixed points of system (
10).
For the existence of fixed points of system (
10), one can easily derive the following results.
Theorem 1. For the existence of fixed points of system (10), the following statements are valid. - 1.
If , then system (10) has three fixed points , and ; - 2.
If then system (10) has a unique fixed point ; - 3.
If , then system (10) has three fixed points , and .
The Jacobian matrix of system (
10) at a fixed point
is
The characteristic polynomial of the Jacobian matrix
reads as
Because of the symmetry of and , it follows from the characteristic polynomial (11) that their characteristic polynomials are the same. Thus, in the sequel, it suffices for one to only consider the properties of and . Now, we formulate some results for the stability of the fixed points and in the following theorems.
Theorem 2. The following statements about the fixed point of system (10) are true. - 1.
If , then,
- (a)
for ,
- i.
when , is a sink;
- ii.
when , is non-hyperbolic;
- iii.
when , is a a source;
- (b)
for , is non-hyperbolic;
- (c)
for , is a saddle;
- 2.
If , then is non-hyperbolic;
- 3.
If then,
- (a)
for , is a saddle;
- (b)
for , is non-hyperbolic;
- (c)
for , is a source.
Proof. The Jacobian matrix of system (
10) at
is
The characteristic polynomial of the Jacobian matrix
can be written as
Note that and
When
,
When
,
Therefore, for
,
. It follows from
Lemma A1 (i.1) that
and
, so
is a sink. For
,
.
Lemma A1 (i.5) reads
; therefore,
is non-hyperbolic. For
,
, which reads
and
by
Lemma A1 (i.4), so
is a source. When
, meaning
is one root of the characteristic polynomial; therefore,
is non-hyperbolic. For
,
Lemma A1 (i.3) tells us that
and
, so
is a saddle.
When then meaning 1 is a root of the characteristic equation; therefore, is non-hyperbolic.
When
,
If
then
, meaning
and
by
Lemma A1 (iii.2), so
is a saddle; if
then
, meaning
is a root of the characteristic equation; hence,
is non-hyperbolic. If
then
. In view of
Lemma A1 (iii.1),
and
, so
is a source. The proof is complete. □
Theorem 3. For , the positive fixed point of system (10) occurs. Moreover, the following statements are valid about the positive fixed point . - 1.
If then,
- (a)
for , is a saddle;
- (b)
for , is non-hyperbolic;
- (c)
for , is a source.
- 2.
If , then,
- (a)
for ,
- i.
when , is a sink;
- ii.
when , is non-hyperbolic;
- iii.
when , is a source;
- (b)
for , is non-hyperbolic;
- (c)
for , is a saddle.
Proof. The Jacobian matrix of system (
10) at
is given by
We can express the characteristic equation of
as
Obviously, and
When
,
If
then
, meaning
and
by
Lemma A1 (iii.2), so
is a saddle; if
then
, meaning
is a root of the characteristic equation; hence,
is non-hyperbolic. If
then
. In view of
Lemma A1 (iii.1),
and
, so
is a source.
When
,
For
,
Thus, for
,
. It follows from
Lemma A1 (i.1) that
and
, so
is a sink. For
,
.
Lemma A1 (i.5) reads
; therefore,
is non-hyperbolic. For
,
, which reads
and
by
Lemma A1 (i.4), so
is a source.
For , meaning is a root of the characteristic polynomial; therefore, is non-hyperbolic.
For
,
Lemma A1 (i.3) tells us that
and
, so
is a saddle.
The proof is over. □
3. Bifurcation Analysis
In this section, we focus on the bifurcation problem of system (
10), namely, for its Neimark–Sacker bifurcation by using the center manifold theorem and bifurcation theory in [
1,
2,
3,
4]. For the discrete bifurcation results, also refer to [
10,
11,
12,
13,
14] and the references cited therein. It suffices for us to study system (
10) at the positive fixed point
. The conclusion for system (
10) at the negative fixed point
is the same.
Suppose the parameters
ensuring the existence of the positive fixed point
. Now let us consider
and
Let
.
When the parameter
a goes through the critical value
it follows from Theorem 3 1(b) that the dimensions of the unstable manifold and stable manifold of system (
10) at fixed point
change. Therefore, system (
10) may undergo a bifurcation at the fixed point
. Furthermore, at this time, system (
10) has a pair of conjugate complex roots
and
satisfying
. Thus, a phenomenon of Neimark–Sacker bifurcation may occur. Now we analyze the process.
Take
and
. Then, system (
10) reads as
Choose the parameter
a as bifurcation parameter. Give a small perturbation
of the parameter
a around
, i.e.,
, with
. Then system (12) is perturbed into
Denote the characteristic polynomial of the Jacobian matrix of the linearized equation associated with system (13) as
, where
Then the two roots of
are
Noticing the parameter vector
, it is not hard to derive
when
and
(
means
. So,
). Therefore,
It is easy to obtain, for
,
and hence,
Moreover, it is obvious that for all for Thus, all of the conditions for Neimark–Sacker bifurcation to happen are satisfied.
Now we are in a position to look for the normal form of system (13) when
. Then system (13) can be regarded as
where
It is easy to derive the two eigenvalues of the matrix
to be
and
with corresponding eigenvectors
and
. Let
i.e.,
The transformation
brings system (14) to
where
Next, compute the quantity
L that is used to judge the stability and direction of a Neimark–Sacker bifurcation (see [
1,
2,
3,
4]):
where
Some calculations display
Summarizing the above analysis, we have the following consequence.
Theorem 4. Assume the parameters satisfy and . Denote . Then system (10) undergoes a Neimark–Sacker bifurcation at the positive fixed point and the negative fixed point , respectively, when the parameter a varies in a small neighborhood of . Moreover, an attracting invariant closed curve bifurcates from the positive fixed point and the negative fixed point , respectively, for . 4. Numerical Simulations
In this section, to illustrate our theoretical results obtained and reveal some new dynamical behaviors in the system (
10), we present the bifurcation diagrams, phase portraits and Lyapunov exponents for specific parameter values using Matlab software (R2023a). For similar numerical simulation work, we refer readers to [
6,
8,
9,
10,
11,
12,
13,
14].
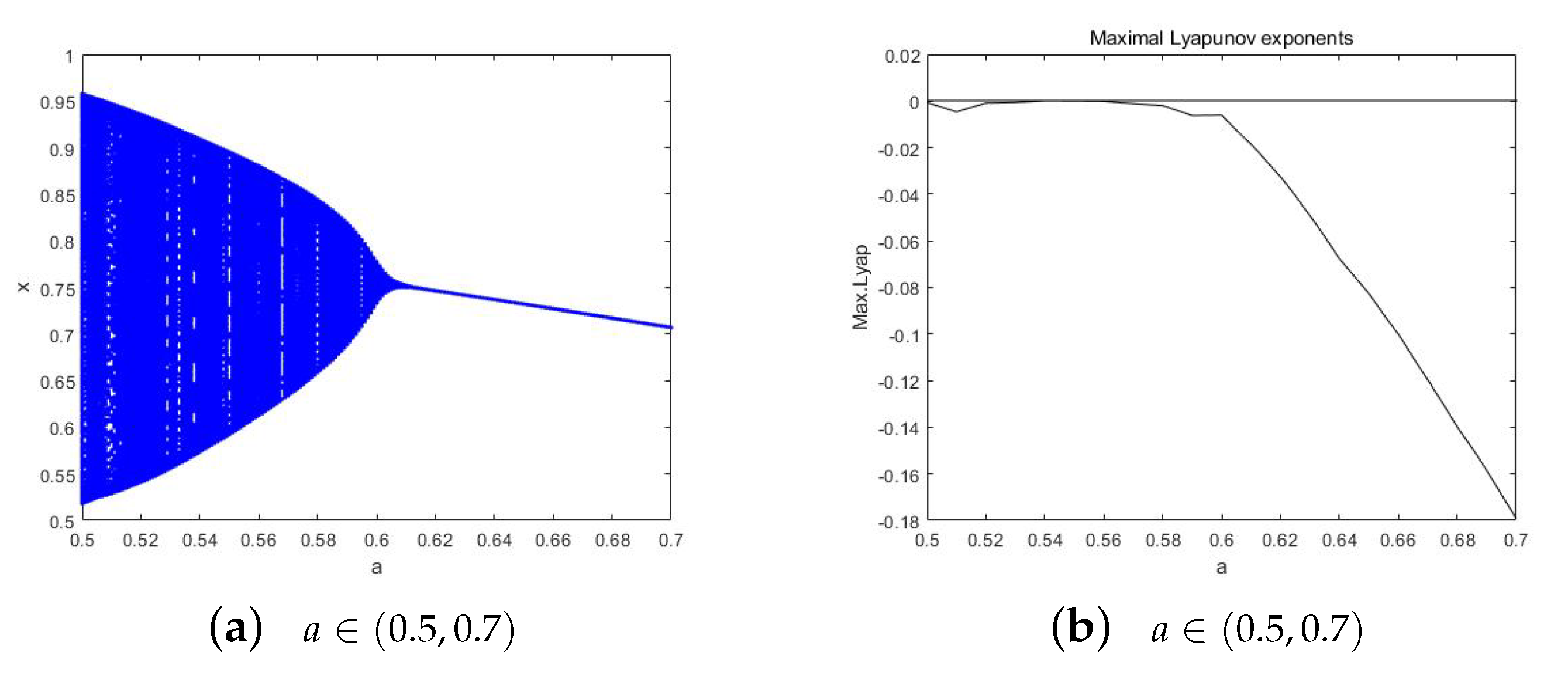
For the fixed point
choose the parameters
and the initial values
From
Figure 1a we can find that when
the system (
10) undergoes a Neimark–Sacker bifurcation. In order to bear out it, we take
a near
and obtain
Figure 1,
Figure 2,
Figure 3 and
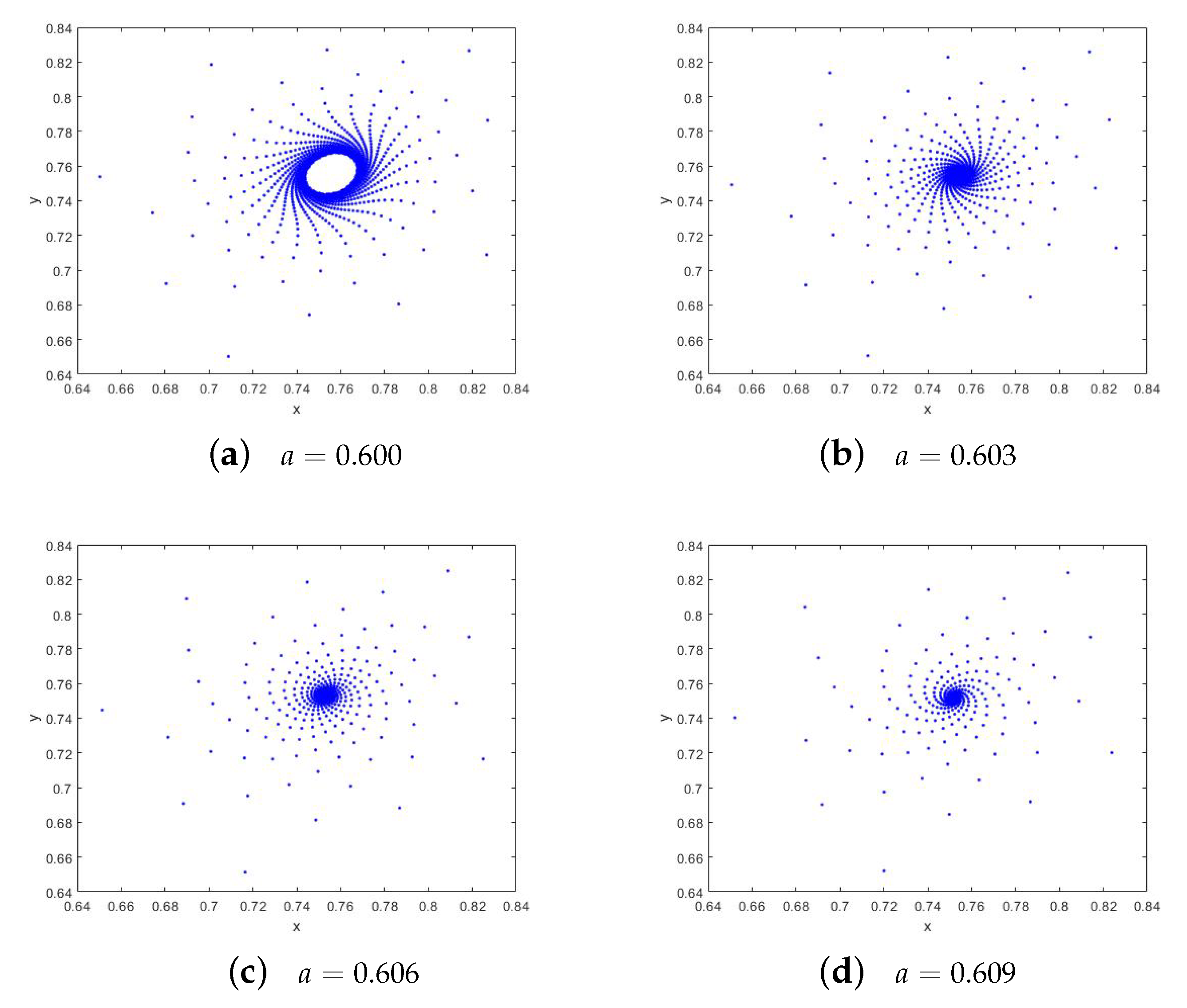
Figure 4a–d, which illustrate the existence of Neimark–Sacker bifurcation at the fixed point
Figure 2a–d mean that the fixed point
is a stable attractor when
. Moreover,
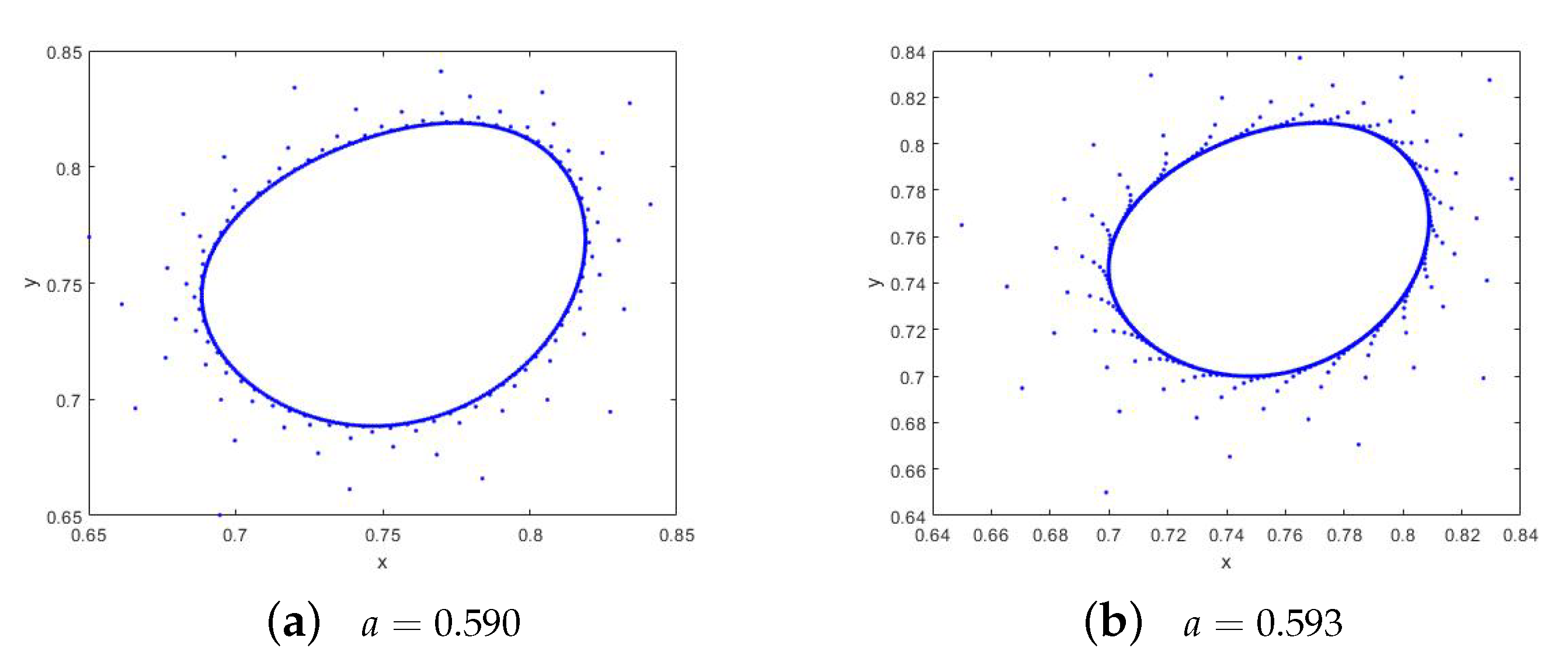
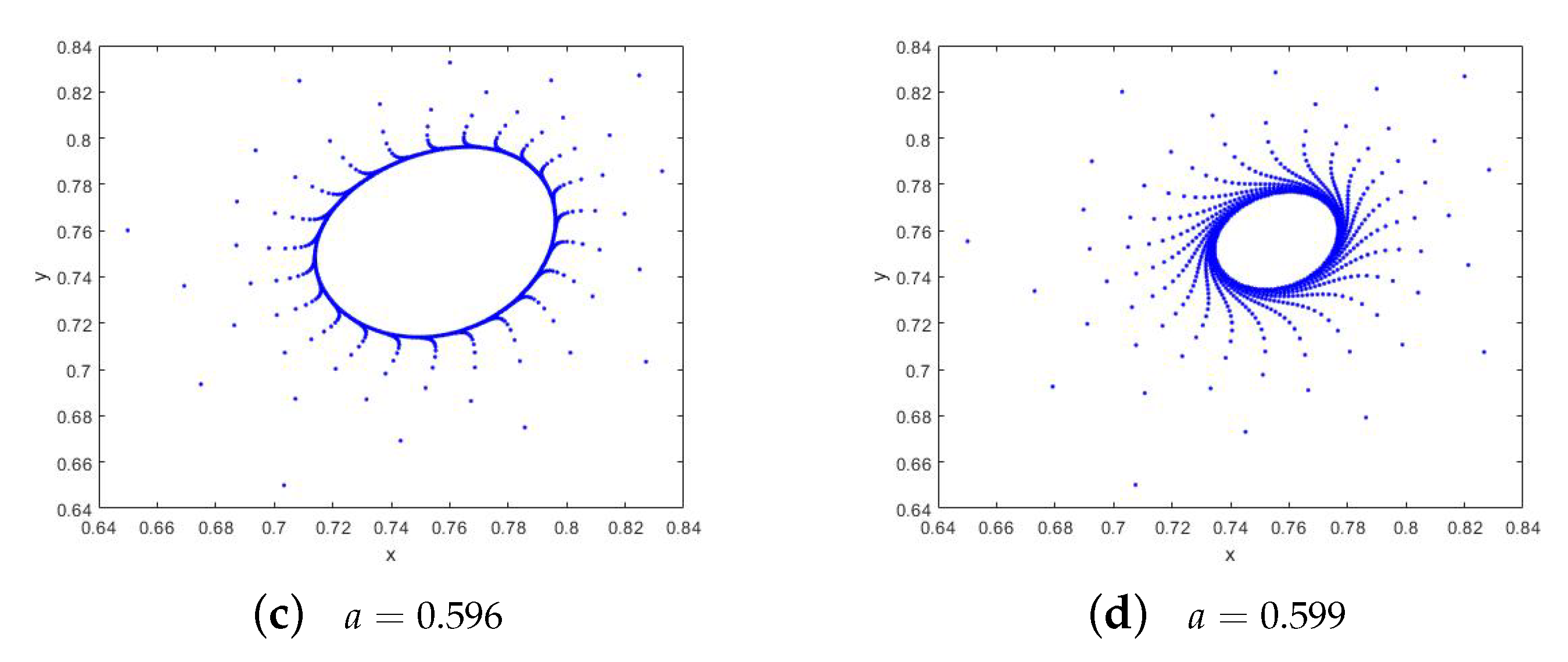
Figure 2a,b and
Figure 3a show the occurrence of Neimark–Sacker bifurcation when
.
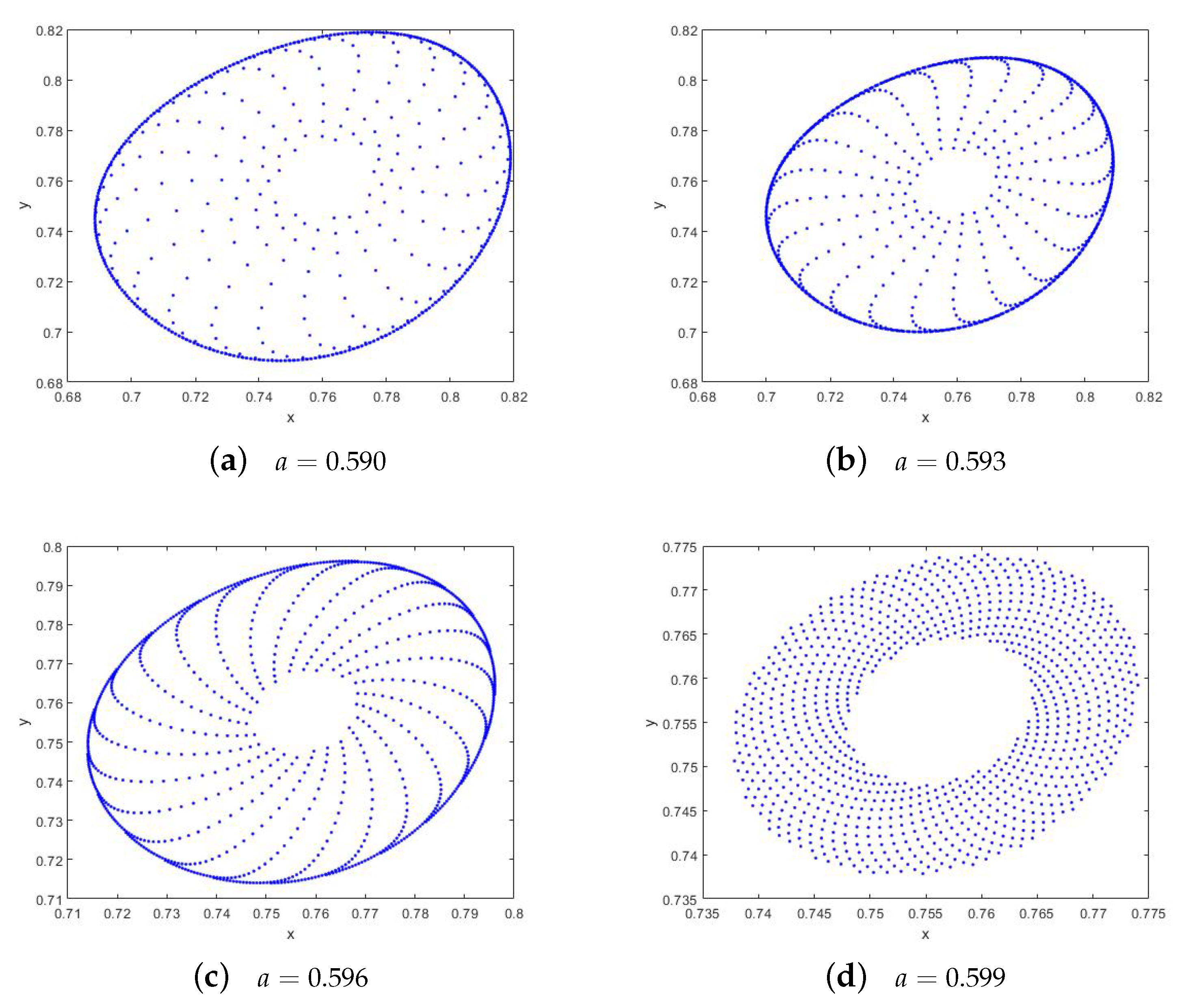
Figure 3 and
Figure 4a–d illustrate that increasing the value of
a leads to a change of stability of the fixed point
and the occurrence of an invariant closed curve around
, which fits the results in Theorem 4. The spectrum of the maximum Lyapunov exponent with respect to the parameter
when
is presented in
Figure 1b.
Remark 1. Figure 3a–d show that the bifurcated closed orbit is stable outside whereas Figure 4a–d show that the bifurcated closed orbit is stable inside. Thus, the closed orbit bifurcated from is stable. This is in accord with our Theorem 4. 5. Conclusions
In this paper, we apply the semidiscretization method to a delay differential equation considered in [
5] and derive a delay difference equation. By using the bifurcation theory, we mainly obtain some results for the Neimark–Sacker bifurcation of the discrete model.
Neimark–Sacker bifurcation is an important mechanic for one system to produce complicated dynamical behaviors. The occurrence of a Neimark–Sacker bifurcation often causes the system to jump from a stable window to chaotic states through periodic and quasi-periodic states and triggers a route to chaos. We find this mechanic in the delay difference equation. Whether or not there are other similar bifurcation problems, such as flip bifurcation, fold bifurcation, etc., in other delay difference equations, and how to find such bifurcations, will be an interesting and important topic and a direction worth future study.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}