Abstract
The boundedness nature and persistence, global and local behavior, and rate of convergence of positive solutions of a second-order system of exponential difference equations, is investigated in this work. Where the parameters , and are constants that are positive, and the initials , and are non-negative real numbers. Some examples are provided to support our theoretical results.
MSC:
39A05; 39A10; 39A13; 39A30
1. Introduction
1.1. Motivation and Literature Review
Differential equations have discrete analogs in difference equations. On their own, linear and nonlinear difference equations, their stability analysis, and local and global behaviors are fascinating (See [1,2,3,4,5,6,7] and references therein). Exponential difference equations first appeared in population dynamics. Though their analysis is difficult, it is also incredibly interesting.
Biologists feel that understanding population dynamics requires a thorough understanding of equilibrium points and their stability. Furthermore, difference equations have several applications in finance, biology, physics, and social sciences. The dynamics of discrete dynamical systems in the exponential form are rich. Population models can be discussed using such systems. Discrete dynamical systems outperform related systems in differential equations, due to their superior computing ability. Difference equations are larger, opposed to looking at the behavior of population models, in the event of non-overlapping generations [8,9]. Difference equations are mathematical equations that describe the relationship between a sequence of values. They are important in many fields, including economics, physics, engineering, and computer science. Here are some of the key reasons why difference equations are important:
Modeling dynamic systems [10]: Difference equations are often used to model dynamic systems, such as population growth, stock prices, or the spread of infectious diseases. By describing the relationship between the values of a sequence over time, these equations help researchers to understand how these systems behave.
Numerical Analysis [11]: Difference equations are also useful in numerical analysis, which involves using numerical methods to approximate solutions to mathematical problems. In particular, difference equations can be used to approximate the solutions to differential equations, which are more difficult to solve analytically.
Control Theory [12]: Difference equations are used extensively in control theory, which involves designing systems that can respond to changes in their environment or inputs. By describing the relationship between the current state of a system and its previous states, difference equations help engineers to design feedback systems that can adjust their behavior to achieve desired outcomes.
Computer Science [13,14]: Difference equations are used in computer science to model algorithms and data structures. For example, the recurrence relation for the Fibonacci sequence, is a difference equation that describes how to compute the nth number in the sequence, using the values of the previous two numbers.
Overall, difference equations are an important tool for modeling and analyzing dynamic systems, approximating solutions to mathematical problems, designing feedback systems, and modeling algorithms and data structures in computer science.
Analyzing the dynamics of solutions to systems of difference equations, and discussing the local and global asymptotic stability of their equilibriums, is interesting [10,12,13,15,16,17,18]. The authors in [19], obtained the behavior of solutions to the difference equation:
where the initials and are positive numbers, and the constants a and b are positive. This equation can be called a biological model. Furthermore, the authors investigated equivalent conclusions for the system of difference equations in [20]:
where the initials are positive numbers and the constants are positive.
The authors found conclusions for the behavior of positive solutions for the following system in [21]
where are positive constants and the: initials are also positive numbers.
In [1], the authors studied
where b and a are positive constants and the initials and are positive numbers.
In [2], the authors investigated the behavior of
In [22], the authors looked into the behavior of
where are positive constants, and the initials are positive real values.
Motivated by the above papers, we will extend the difference equation in [1], the system in [2], and the system in [22], to the following system:
where are positive constants, and the initials are positive real values.
The aim of this work is to look at the persistence, boundedness, and asymptotic behavior of the system’s positive solutions .
It is clear that in the specific instances when , becomes the system in [2]. Thus, we obtain the difference equation in [1] when . The following works discuss differences and systems of difference equations in exponential form: [1,2,19,20,21,22,23,24,25]. Furthermore, because difference equations have several applications in applied sciences, many papers and books on the theory of difference equations may be found, e.g., see [8,26,27] and references therein.
1.2. Structure of the Paper
The structure of this paper will be as follows: In Section 2, we study the asymptotic solution of system (1), by investigating its boundedness and persistence. In Theorem 2, we establish an invariant set of intervals of system . Theorems 3 and 4 deal with the local stability of the system and prove that every solution converges to its equilibrium point. Theorem 5 deals with the global stability of the system. In Section 3, we present some interesting numerical examples, that show the behavior of the solution of system .
2. Main Results
Asymptotic Behavior of Solutions of System
First, the persistence and boundedness of the solutions must be established; in the first theorem, we will compare the persistence and boundedness of positive solutions of , with solutions of a solvable system of difference equations. Our approach is based on Theorem 2 from [28]. See [2,8,27] for related and comparable results.
Theorem 1.
Consider system such that:
Then, every positive solution of is bounded and persists.
Proof.
Let be any arbitrary solution of . We may deduce as a result of
In addition, it follows from and that,
The non-homogeneous difference equations will be considered next
Therefore, a solution of is provided by
where depend on the initial values Thus, and are bounded sequences. Now, we consider of , such that
Thus, from and , we get
Therefore, , and are bounded sequences. Hence, from , the proof of this theorem is now complete. □
Theorem 2.
Consider system with relations satisfied. Then, the following statements are true: The set
is an invariant set of
Let ϵ be a positive number, and be a solution of
Consider
Then, there exists , provided that ∀
Proof.
(i) Let be a solution of with , such that
Then, from and we have:
Then,
Let be a solution of Therefore, from Theorem 1 we get,
We get,
which imply that
Thus, from , there exists such that holds true. This completes the proof of the theorem. □
In the next two theorems, we will study the asymptotic behavior of the positive solutions of . The next lemma is a slight modification of Theorem , of [26], and for the reader’s convenience, we state it without its proof.
Lemma 1.
Let are continuous functions, and are positive numbers, such that Such that
In addition, suppose that (resp. (resp. ) is decreasing with respect to V (resp. W) (resp. U) for every U (resp. V) (resp. W), and increasing with respect to U for every V (resp. W) (resp. U). Finally, assume that if are all real values, such that
then and . Then, the following system of difference equation
possesses an equilibrium , and each positive solution of the system which satisfies
converges to the unique positive equilibrium of
Theorem 3.
Consider system such that the following relation holds if , then
and if , then
Then, has a unique equilibrium , and every positive solution of tends to when
Proof.
Consider
where
, and are defined in Then, from , and we see that for , and
Moreover,
and so
Let be a solution of As requirements from Theorem are implied by relations there exists such that relations and hold.
Let r, R, t, T, m, M be non-negative real numbers, such that
From we have
from and we obtain
Consider the function
Consider W to be a solution of We claim that
From , we have
So,
Therefore,
Using to prove we prove
From we get
from , and we have as
Since ,
Moreover, if then from it follows that
we get
If we can prove holds true. Then, from and we get , so from it follows that
Therefore, from and since , it follows
From and , we have
and so
Therefore, relations and imply that , and so we have
Hence, from we get since
Thus, from we get . Which implies that holds true, so there exists a such that
Therefore, F decreases in the interval Assume that F has roots that are larger than W. Assume that is the lowest root of F, and that We see that there is such that F is decreasing in Since 0 > , and F is continuous, we see that F has a root in Similarly, we prove F does not have any solutions in . As a result, has a single solution. Hence, are solutions of Thus, Similarly, if we get
and
and we show has a unique solution. Further, as are the solutions of , we get In addition, we get that has a unique solution, and are solutions of . So Therefore, from Lemma 1, the proof of the theorem is now complete. □
Theorem 4.
If
where
Then, system has a unique non-negative equilibrium point in
Proof.
Consider
Assume that , then we have
From ,
take
assume that
where
also
It is easy to see that
if and only if
where
and
if and only if
where
As a result, D(U) in the interval , has at least one positive solution. If condition is met, the following is the result:
and
putting Equation into Equation we get:
Putting Equation into Equation
where
Hence, condition holds, then from we get Hence, has a unique positive solution in This completes the proof. □
Theorem 5.
Consider system that stores either and or . Assume that the following relationship holds true:
Then, of is globally asymptotically stable.
Proof.
We’ll start by demonstrating that is locally asymptotically stable.
We have
The above system is equivalent to the system
where
The characteristics equation of is
Since satisfy and , thus we have
Hence, from and Remark of [27], all the roots have a modulus less than 1, which implies that is locally asymptotically stable. Using Theorem 3 is globally asymptotically stable. This completes the proof of the theorem. □
3. Numerical Simulations
Example 1.
Let , and for the sake of simplicity assume , then we have the system in the following form:
with initial conditions
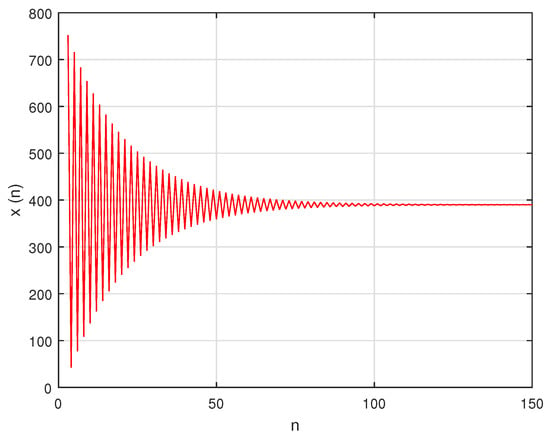
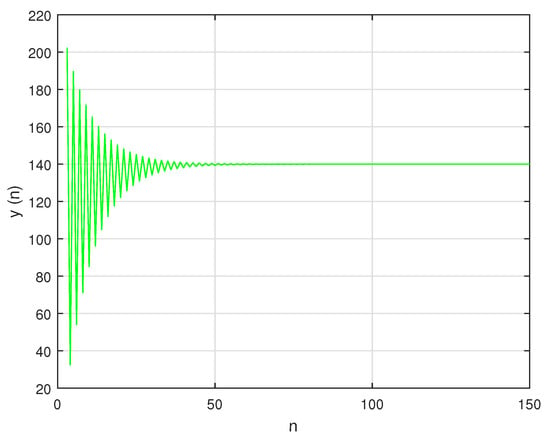
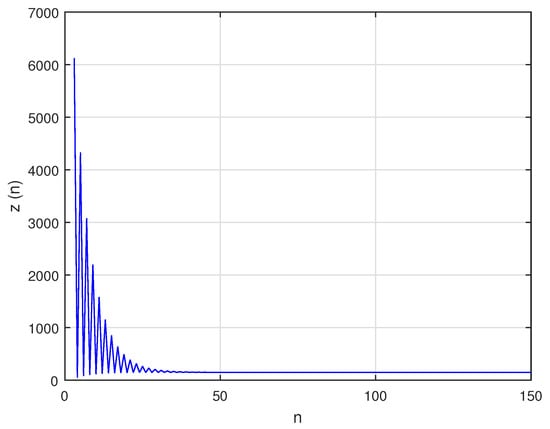
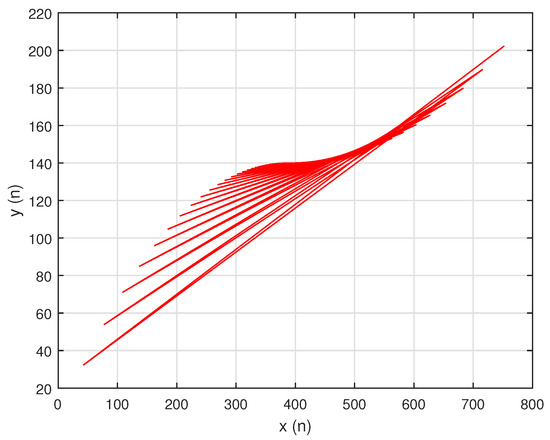
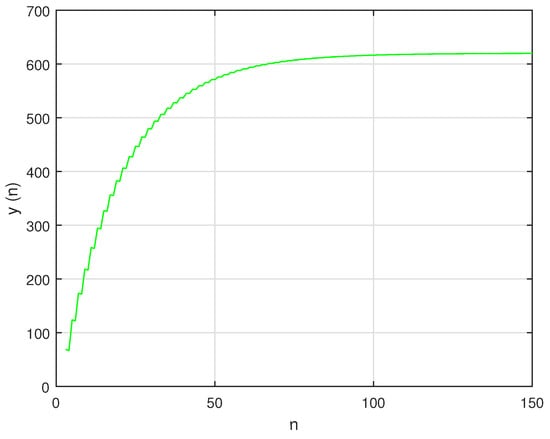
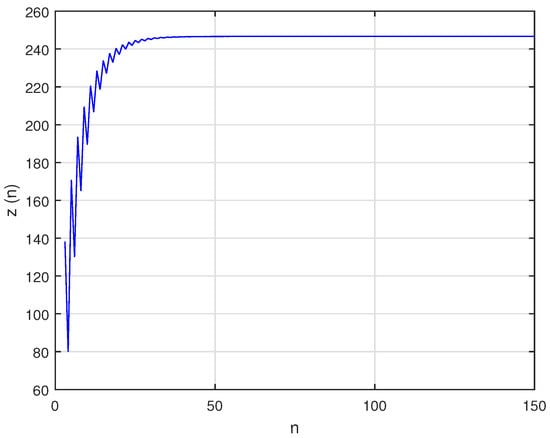
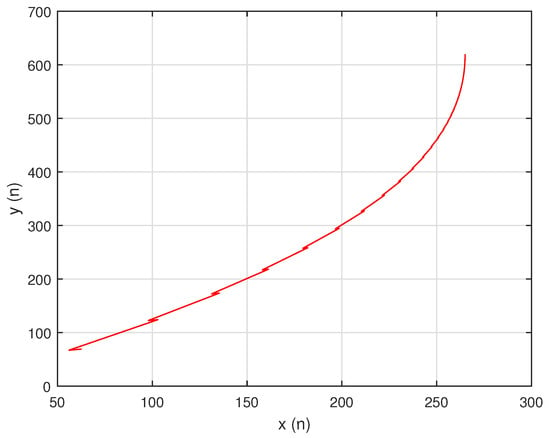
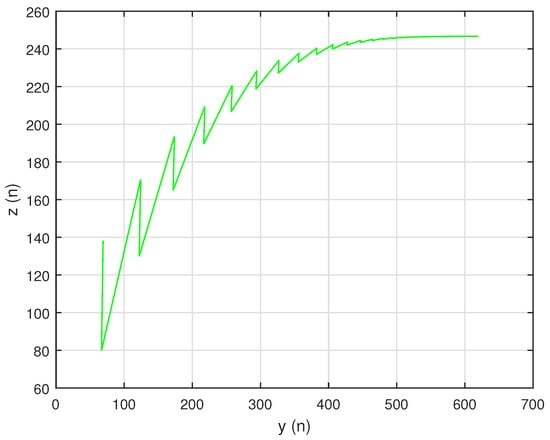
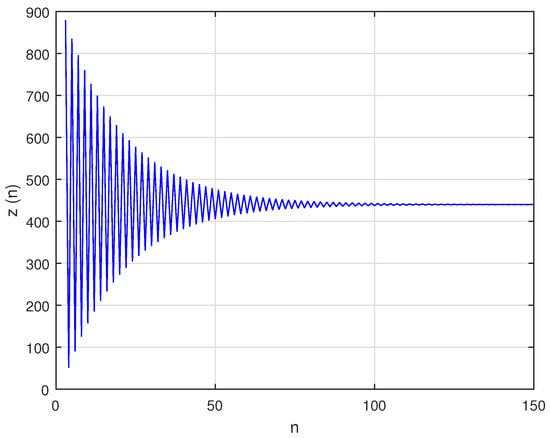
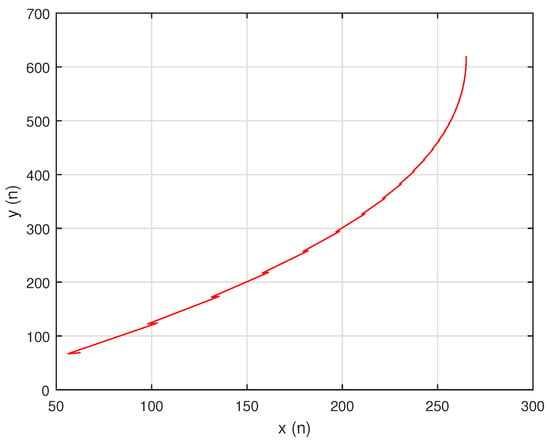
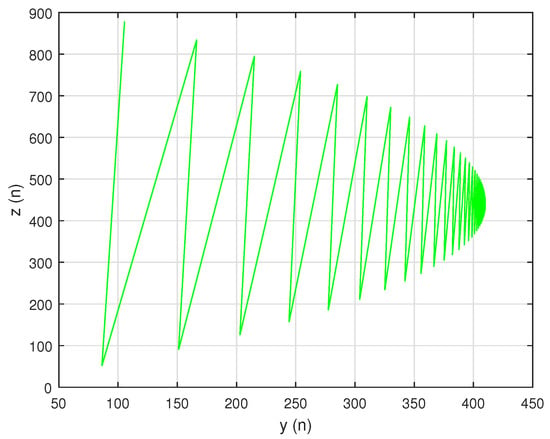
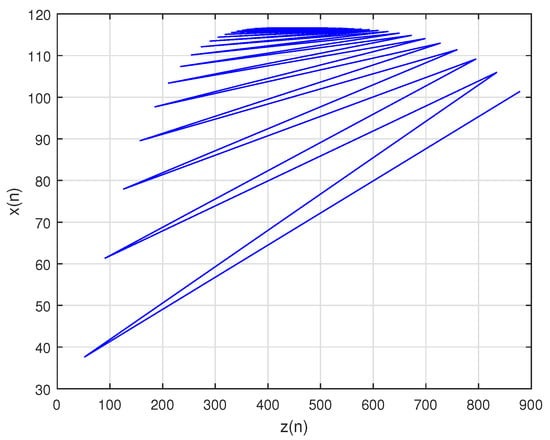
In this situation, the system’s unique positive equilibrium point , is given by The graphs of , and are shown in Figure 1, Figure 2 and Figure 3, respectively, and , , and , the attractors of system , are shown in Figure 4, Figure 5 and Figure 6, respectively. The graph of the phase portrait of system is also shown in Figure 7.
Figure 1.
Graph of for system (57).
Figure 2.
Graph of for system (57).
Figure 3.
Graph of for system (57).
Figure 4.
Attractor for system (57).
Figure 5.
Attractor for system (57).
Figure 6.
Attractor for system (57).
Figure 7.
Phase portrait of system .
Example 2.
Let for the sake of simplicity in the numerical figures, assume Then, system becomes:
with initial conditions
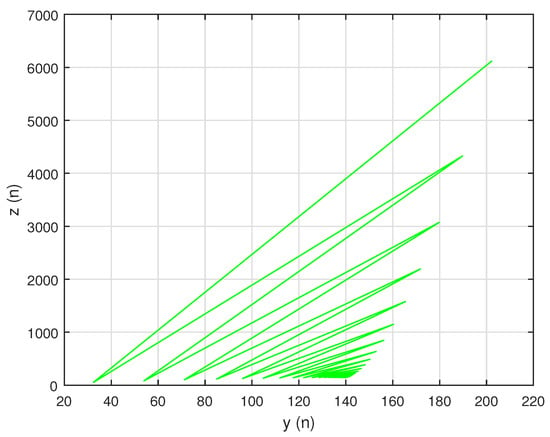
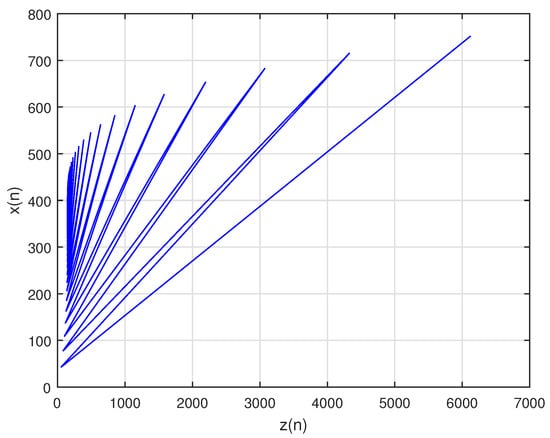
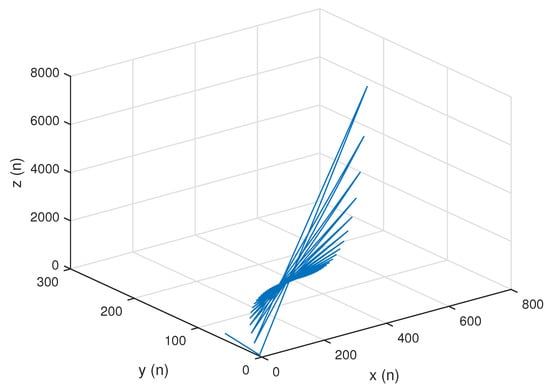
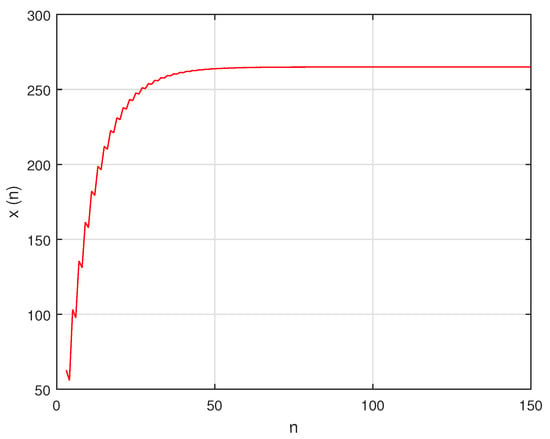
In this situation, the system’s unique positive equilibrium point , is given by The graphs of , and are shown in Figure 8, Figure 9 and Figure 10, respectively, and , , and , the attractors of system are shown in Figure 11, Figure 12 and Figure 13, respectively. The graph of the phase portrait of system is also shown in Figure 14.
Figure 8.
Graph of for system (58).
Figure 9.
Graph of for system (58).
Figure 10.
Graph of for system (58).
Figure 11.
Attractor for system (58).
Figure 12.
Attractor for system (58).
Figure 13.
Attractor for system (58).
Figure 14.
Phase portrait of system .
Example 3.
Let For simplicity, in numerical graphs we assume, Then, system can be written as:
with initial conditions
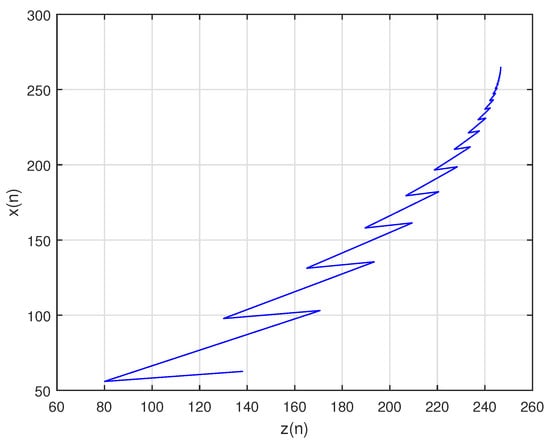
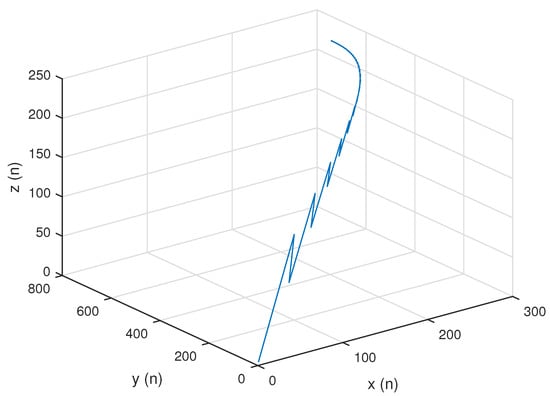
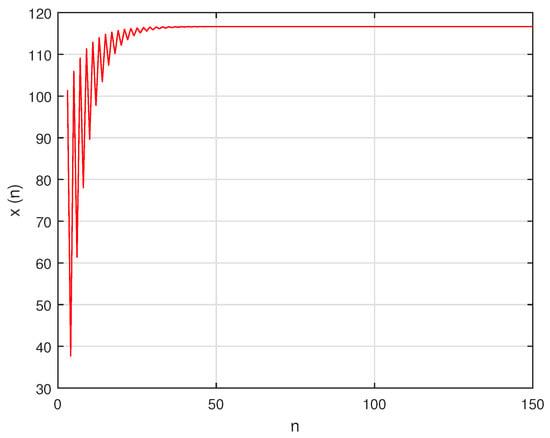
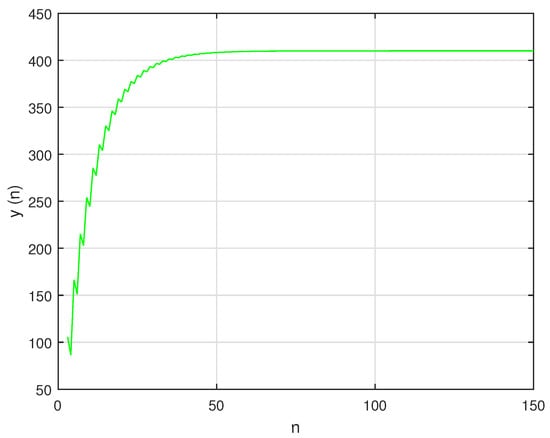
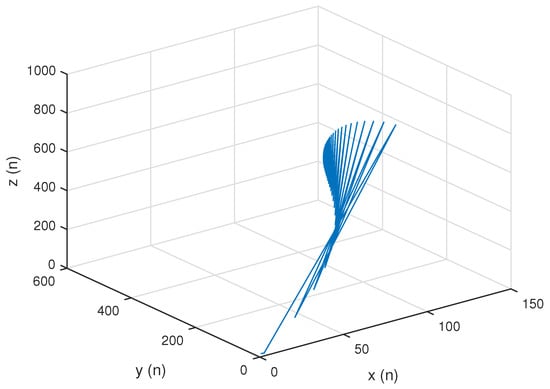
In this case, the unique positive equilibrium point of system is given by The graphs of , and are shown in Figure 15, Figure 16 and Figure 17, respectively, and , , and , the attractors of system are shown in Figure 18, Figure 19 and Figure 20, respectively. The graph of phase portrait of system is also shown in Figure 21.
Figure 15.
Solution behavior of for system (59).
Figure 16.
Solution behavior of for system (59).
Figure 17.
Solution behavior of for system (59).
Figure 18.
Attractor for system (59).
Figure 19.
Attractor for system (59).
Figure 20.
Attractor for system (59).
Figure 21.
Phase portrait of system .
4. Conclusions
The qualitative behavior of a system of exponential difference equations is the subject of this paper. The asymptotic behavior of the solutions is obtained, with a necessary and sufficient condition, and presence and uniqueness of a positive fixed point of system , having been investigated. The boundedness and persistence of the positive solutions have been demonstrated. Furthermore, we have demonstrated that the positive equilibrium point of system , exists both locally and globally. In addition, the rate of convergence of the positive solutions of (1), converges to its positive equilibrium point. Finally, to enhance our theoretical discussion, a few numerical examples are provided.
Author Contributions
Conceptualization, A.K., S.S. and T.F.I.; methodology, A.K. and T.F.I.; software, B.A.A.M., B.R.A.-S. and H.M.E.A.; validation, B.R.A.-S. and B.A.A.M.; formal analysis, T.F.I.; investigation, A.K., T.F.I. and S.S.; resources, B.R.A.-S., H.M.E.A. and S.S; data curation, S.S. and T.F.I.; writing—original draft preparation, A.K.; writing—review and editing, A.K., B.A.A.M. and S.S.; visualization, S.S. and B.A.A.M.; supervision, A.K. and T.F.I.; project administration, A.K. and T.F.I.; funding acquisition, T.F.I. All authors have read and agreed to the published version of the manuscript.
Funding
King Khalid University, project under grant number RGP2/141/44.
Data Availability Statement
All the data used are cited within this manuscript.
Acknowledgments
The authors are thankful to the anonymous referees for their valuable suggestions. The authors extend their appreciation to the Deanship for Scientific Research at King Khalid University for funding this work through Larg groups (project under grant number RGP2/141/44).
Conflicts of Interest
The authors declare no conflict of interest.
References
- El-Metwally, H.; Grove, E.A.; Ladas, G.; Levins, R.; Radin, M. On the difference equation, Um+1 = α + βUm−1e−Um. Nonlinear Anal. 2001, 47, 4623–4634. [Google Scholar] [CrossRef]
- Papaschinopoluos, G.; Radin, M.A.; Schinas, C.J. On a system of two difference equations of exponential form: Um+1 = a + bUm−1e−Vm, Vm+1 = c + dVm−1e−Um. Math. Comput. Model. 2011, 54, 2969–2977. [Google Scholar] [CrossRef]
- Papaschinopoulos, G.; Schinas, C.J. On the dynamics of two exponential type systems of difference equations. Comp. Math. Appl. 2012, 64, 2326–2334. [Google Scholar] [CrossRef]
- Papaschinopoulos, G.; Radin, M.A.; Schinas, C.J. Study of the asymptotic behavior of the solutions of three systems of difference equations of exponential form. Appl. Math. Comp. 2012, 218, 5310–5318. [Google Scholar] [CrossRef]
- Gouasmia, M.; Ardjouni, A.; Djoudi, A. Study of asymptotic behavior of solutions of neutral mixed type difference equations. Open Jr. Math. Anal. 2020, 4, 11–19. [Google Scholar] [CrossRef]
- Iyanda, F.K. Algorithm analytic-numeric solution for nonlinear gas dynamic partial differential equation. Eng. Appl. Sci. Lett. 2022, 5, 32–40. [Google Scholar] [CrossRef]
- Al-Raeei, M. The study of human monkeypox disease in 2022 using the epidemic models: Herd immunity and the basic reproduction number case. Ann. Med. Surg. 2023, 85, 316–321. [Google Scholar] [CrossRef]
- Agarwal, R.P. Difference Equations and Inequalities, 2nd ed.; Dekker: New York, NY, USA, 2000. [Google Scholar]
- Elaydi, S. An Introduction to Difference Equations, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Khaliq, A.; Ibrahim, T.F.; Alotaibi, A.M.; Shoaib, M.; El-Moneam, M.A. Dynamical Analysis of Discrete-Time Two-Predators One-Prey Lotka–Volterra Model. Mathematics 2022, 10, 4015. [Google Scholar] [CrossRef]
- Mazzia, F.; Trigiante, D. The role of difference equations in numerical analysis. Comput. Math. Appl. 1994, 28, 209–217. [Google Scholar] [CrossRef]
- Brenner, J.L.; D’Esopo, D.A.; Fowler, A.G. Difference Equations in Forecasting Formulas. In Management Science; Theory Series; Doubleday: New York, NY, USA, 1968; Volume 15, pp. 141–159. [Google Scholar]
- Frank, S.A. Control Theory Dynamics. In Control Theory Tutorial; Springer Briefs in Applied Sciences and Technology; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Chatzarakis, G.E.; Elabbasy, E.M.; Moaaz, O.; Mahjoub, H. Global Analysis and the Periodic Character of a Class of Difference Equations. Axioms 2019, 8, 131. [Google Scholar] [CrossRef]
- Khaliq, A.; Mustafa, I.; Ibrahim, T.F.; Osman, W.M.; Al-Sinan, B.R.; Dawood, A.A.; Juma, M.Y. Stability and Bifurcation Analysis of Fifth-Order Nonlinear Fractional Difference Equation. Fractal Fract. 2023, 7, 113. [Google Scholar] [CrossRef]
- Khaliq, A.; Alayachi, H.S.; Zubair, M.; Rohail, M.; Khan, A.Q. On stability analysis of a class of three-dimensional system of exponential difference equations. AIMS Math. 2023, 8, 5016–5035. [Google Scholar] [CrossRef]
- Khaliq, A.; Hassan, S.S. Analytical solution of a rational difference equation. Adv. Stud. Euro-Tbilisi Math. J. 2022, 15, 181–202. [Google Scholar] [CrossRef]
- Alotaibi, A.M.; Khaliq, A.; Ali, M.; Sadiq, S. On a Class of Discrete Max-Type Difference Equation Model of Order Four. Dis. Dyn. Nat. Soc. 2022, 2022, 8766711. [Google Scholar] [CrossRef]
- Grove, E.A.; Ladas, G.; Prokup, N.R.; Levis, R. On the global behavior of solutions of a biological modal. Commun. Appl. Nonlinear Anal. 2000, 7, 33–46. [Google Scholar]
- Papaschinopoulos, G.; Fotiades, N.; Schinas, C.J. On a system of difference equations including negative exponential terms. J. Differ. Equ. Appl. 2014, 20, 717–732. [Google Scholar] [CrossRef]
- Papaschinopoulos, G.; Ellina, G.; Papadopoulos, K.B. Asymptotic the behavior of the positive solutions of an exponential type system of difference equations. Appl. Math. Comput. 2014, 245, 181–190. [Google Scholar] [CrossRef]
- Phong, M.N. A note on a system of two nonlinear difference equations. Elect. Math. Anal. Appl. 2015, 3, 170–179. [Google Scholar]
- Zhang, D.C.; Shi, B. Oscillation and global asymptotic stability in a discrete epidemic model. J. Math. Anal. Appl. 2003, 278, 194–202. [Google Scholar] [CrossRef]
- Stefanidou, G.; Papaschinopoluos, G.; Schinas, C.J. On a system of two exponential type difference equations. Commum. Appl. Nonlinear Anal. 2010, 17, 1–13. [Google Scholar]
- Stević, S. On a discrete epidemic model. Discrete Dyn. Nat. Soc. 2007, 2007, 87519. [Google Scholar] [CrossRef]
- Grove, E.A.; Ladas, G. Periodicities in Nonlinear Difference Equations; Chapman and Hall/CRC: Boca Raton, FL, USA, 2005. [Google Scholar]
- Kocic, V.L.; Ladas, G. Global Behavior of Nonlinear Difference Equations of Higher Order with Applications; Kluwer Academic: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Stević, S. On the recursive sequence . Indian J. Pure Appl. Math. 2002, 33, 1767–1774. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).