

A Random Forest-Based Method for Predicting Borehole Trajectories


Abstract
:1. Introduction
2. Basic theory
2.1. Calculation of the Predicted Values of the Attitude of the Measurement Points
2.2. A study of the Generalizability of Trajectory Data Prediction Algorithms
2.3. Borehole Trajectory Prediction Based on Random Forest Regression
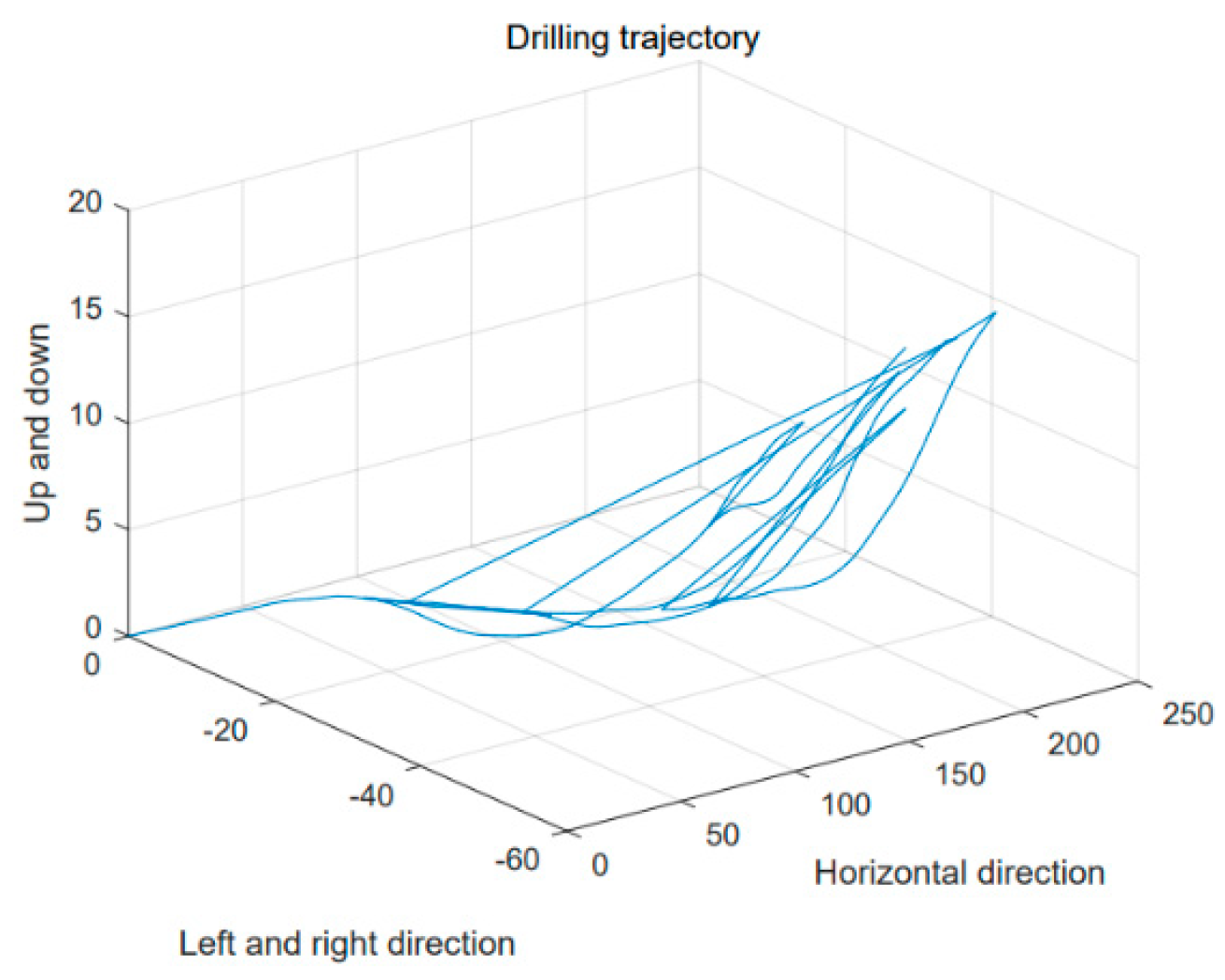
3. Analysis of Drilling Trajectory Data
3.1. Description of the Data Set
3.2. Data Cleaning
3.3. Feature Selection
4. A Random Forest-Based Method for Predicting Borehole Trajectories
4.1. Problem Definition
4.2. Feature and Model Selection
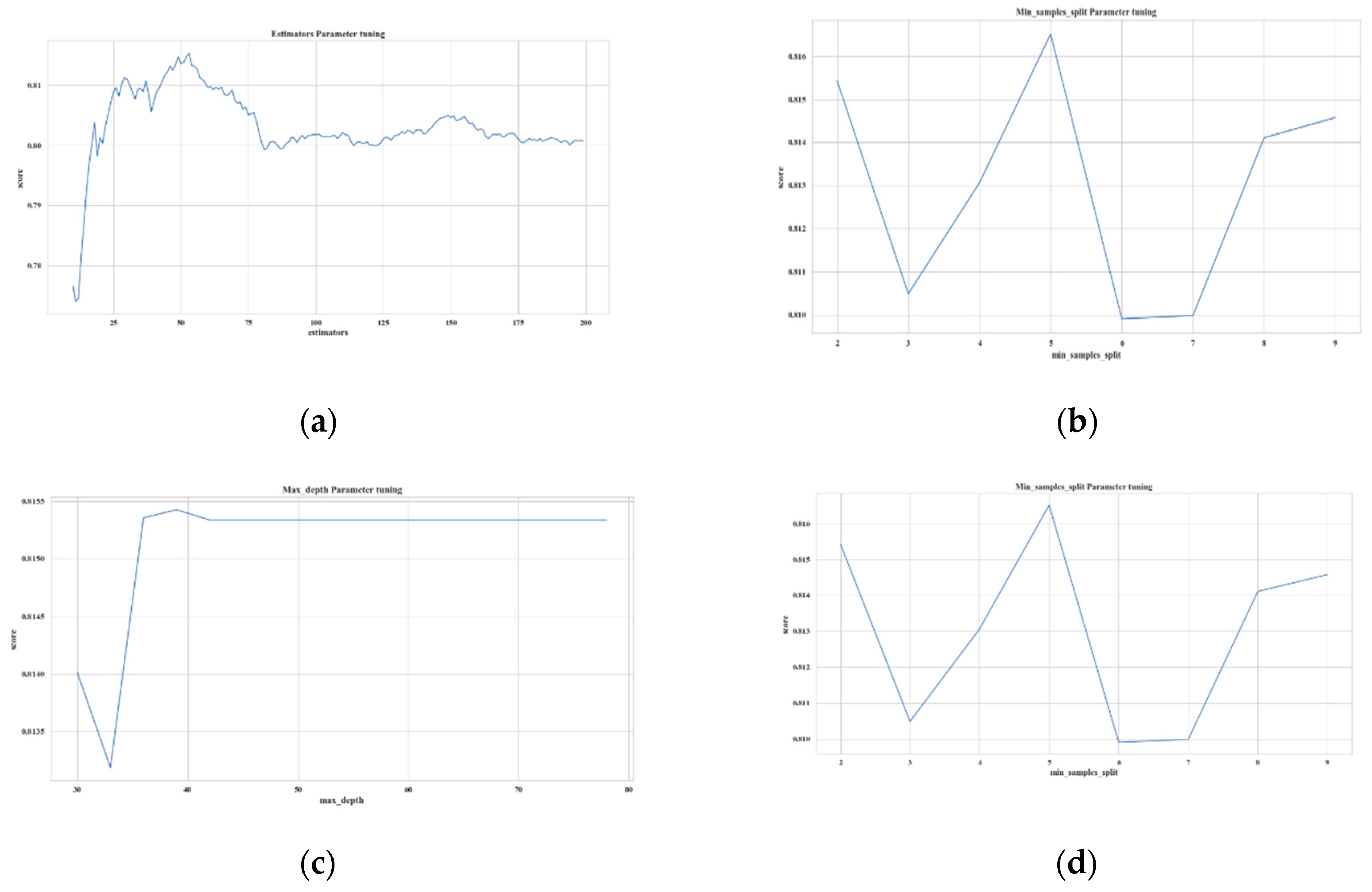
4.3. Hyperparameter Determination
4.4. Algorithmic Principles of the Random Forest Regression Model (Algorithm 1)
| Algorithm 1. Pseudocode for random forest prediction principles |
5. Prediction Results of the Random Forest Regression Model
5.1. Evaluation Indicators
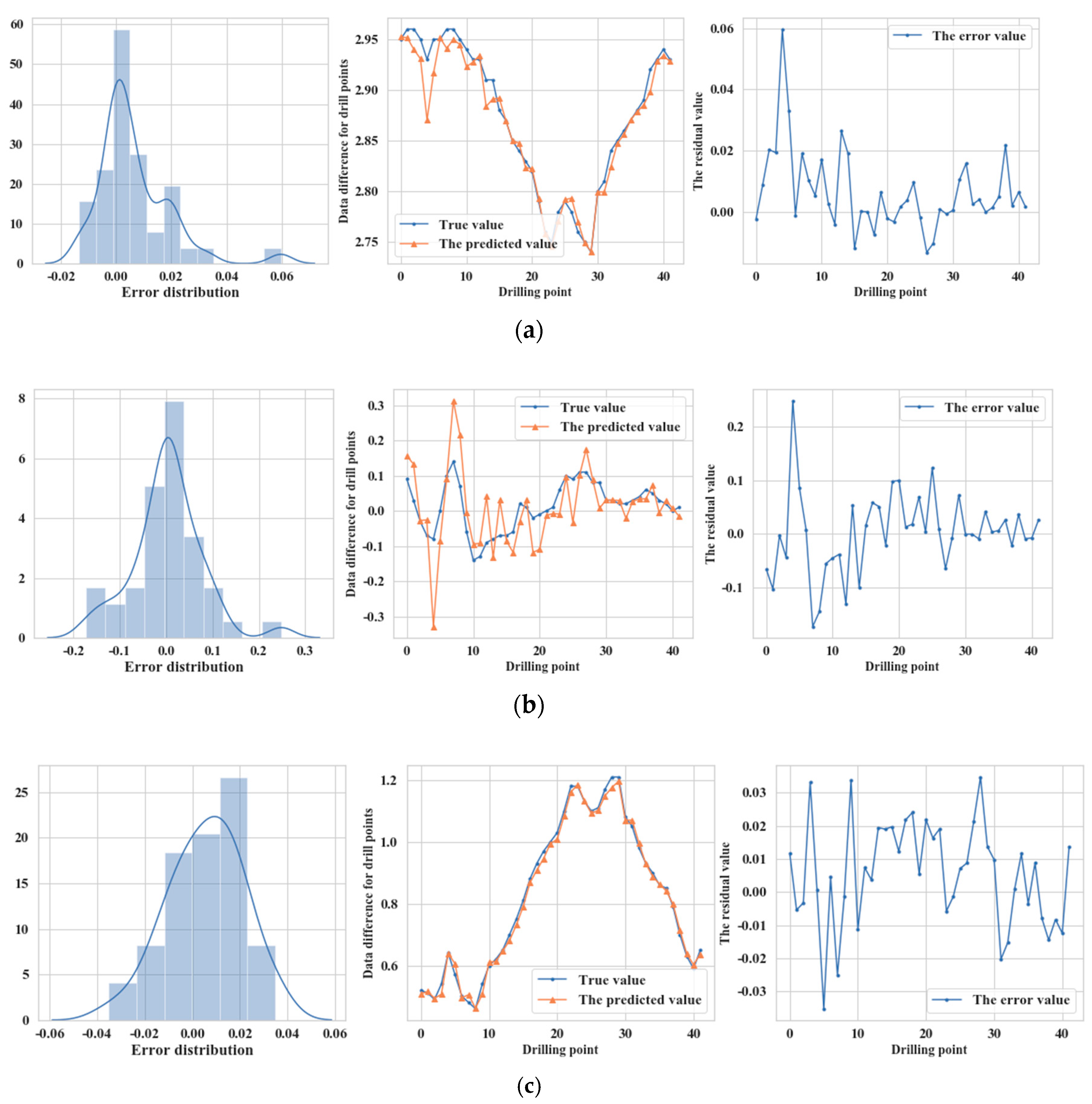
5.2. Experimental Prediction Results
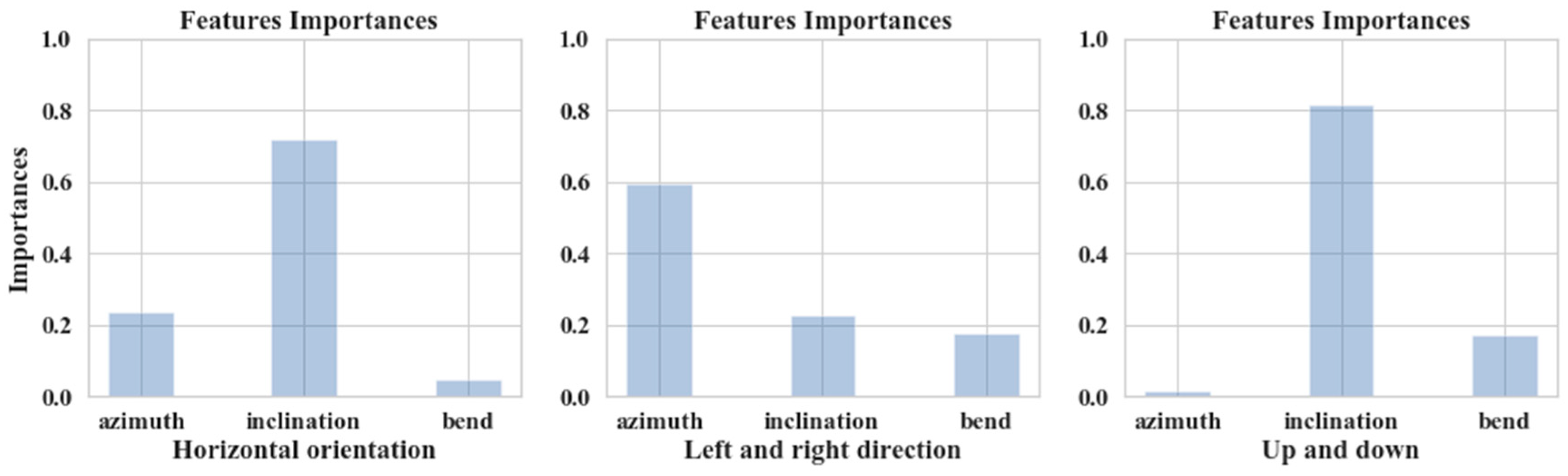
5.3. Predicting Feature Importance
6. Comparison of Random Forest Model Prediction Results with Other Models
6.1. Comparative Model for Borehole Trajectory Prediction
6.1.1. Gradient Boosting Regression
6.1.2. K-Nearest Neighbor Regression
6.1.3. SVR Regression
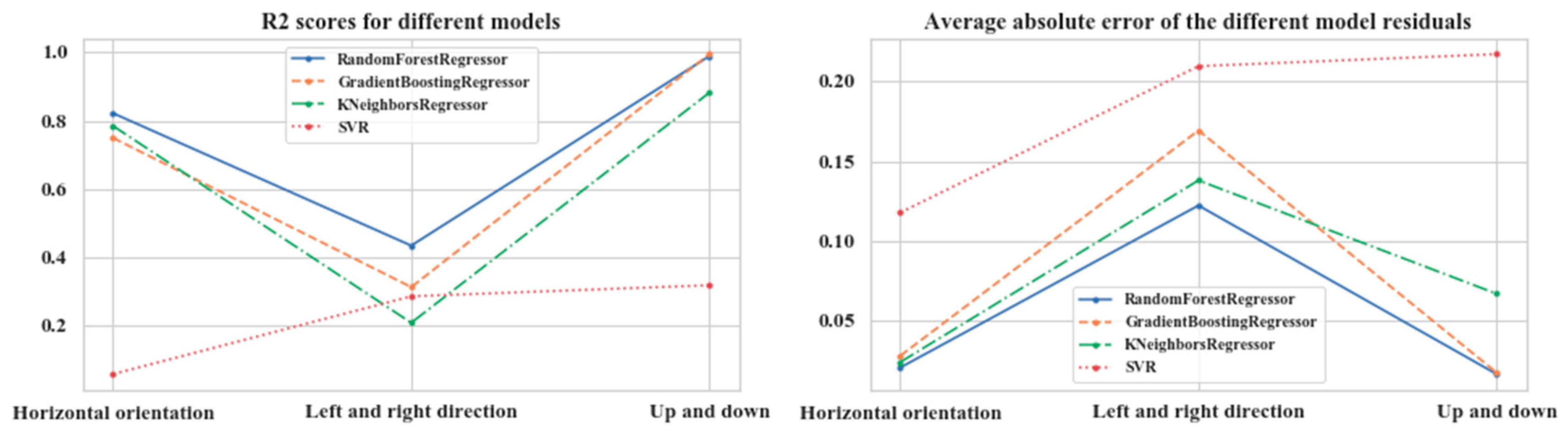
6.2. Comparison of Predicted Results
7. Limitations of the Approach in This Article
7.1. Algorithm Limitations
7.2. Practical Application Restrictions
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, H.; Wang, H.; Cheng, X. Data-driven fine-grained control of gas extraction boreholes based on data. Min. Saf. Environ. Prot. 2022, 49, 125–130. [Google Scholar] [CrossRef]
- Liang, Q.; Liu, X.; Shi, L.; Tao, Y.; Li, L.; Hu, G. Application of combined drilling mode of guide eye and expansion eye in directional well trajectory control. Pet. Drill. Prod. Technol. 2015, 37, 9–11. [Google Scholar] [CrossRef]
- Su, Y.; Bai, J. Three-dimensional analysis of bent-joint-downhole power drilling tool combinations by longitudinal and transverse bending method. Acta Pet. Sin. 1991, 12, 110–120. [Google Scholar]
- Wang, J. A mining with drilling measurement system. Shandong Coal Sci. Technol. 2016, 34, 132–133. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, J. Overview of oil and gas production forecasting by machine learning. Pet. Reserv. Eval. Dev. 2021, 11, 613–620. [Google Scholar] [CrossRef]
- Wang, Z.; Zhu, H.; Xu, B.; Yan, D.; Du, H.; Luo, L.; Cui, Y. Mechanical Properties prediction of nuclear structural Materials based on Machine Learning Algorithm. Shanghai Met. 2022, 44, 102–110. [Google Scholar] [CrossRef]
- Wang, Z. Optimal Scheduling of Electric Heating Integrated Energy System Based on Machine Learning Prediction Algorithm. Master’s Thesis, Shanxi University, Taiyuan, China, 2022. [Google Scholar]
- Song, L.; Meng, F.; Yuan, G. Moving object location prediction algorithm based on Markov model and trajectory similarity. Comput. Appl. 2016, 36, 39–43+65. [Google Scholar] [CrossRef]
- Chen, W.; Nan, P.; Yan, X.; Peng, J. Prediction and model optimization of coal mining machine cut-off trajectory based on deep learning. J. Coal 2020, 45, 4209–4215. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, Q. A mathematical model for borehole trajectory prediction based on wavelet-neural network. Mech. Des. 2008, 25, 25–27. [Google Scholar] [CrossRef]
- Liu, L. Research on Sparse Trajectory Prediction Method Based on Entropy Estimation. Master’s Thesis, China University of Mining and Technology, Xuzhou, China, 2017. [Google Scholar]
- Sun, R. Description and calculation method of near-horizontal directional borehole trajectory in underground coal mine. China Coalbed Methane 2010, 7, 30+36–39. (In Chinese) [Google Scholar] [CrossRef]
- Guo, Y. Prediction and Update of LWD Curve While Drilling. Pet. Drill. Tech. 2010, 38, 25–28. [Google Scholar] [CrossRef]
- Feng, D. Research on directional pore-forming technology of accurate drainage hole of tunneling roadway in underground coal mine. Ore Explor. Eng. (Rock Soil Drill. Eng.) 2018, 45, 33–36+41. [Google Scholar] [CrossRef]
- Sun, T.; Lin, L.; Liu, Z.; Song, J.; Wang, X. Research on trajectory 28prediction method of directional borehole in underground coal mine. Coal Mine Min. 2019, 24, 15+22–25. [Google Scholar] [CrossRef]
- Yang, X.; Chuan, Y.; He, S.; Jiang, D.; Cao, B.; Wang, S. Machine learning prediction of specific capacitance in biomass derived carbon materials: Effects of activation and biochar characteristics. Fuel 2023, 331, 125718. [Google Scholar] [CrossRef]
- Sheikhi, A.; Mesiar, R.; Holeňa, M. A dimension reduction in neural network using copula matrix. Int. J. Gen. Syst. 2022. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, L.; Li, K.; Xue, X.; Zhang, X.; Kim, B.; Li, C.Y. Machine-learning prediction of aerodynamic damping for buildings and structures undergoing flow-induced vibrations. J. Build. Eng. 2023, 63, 105374. [Google Scholar] [CrossRef]
- Xu, W.; Guo, D.; Mi, J.; Qian, Y.; Zheng, K.; Ding, W. Two-way concept-cognitive learning via concept movement viewpoint. IEEE Trans. Neural Netw. Learn. Syst. 2023, 1–15. [Google Scholar] [CrossRef]
- Xu, W.; Guo, D.; Qian, Y.; Ding, W. Two-way concept-cognitive learning method: A fuzzy-based progressive learning. IEEE Trans. Fuzzy Syst. 2022, 1–15. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, D.; Xu, W. Two-way Concept-Cognitive Learning with Multi-source Fuzzy Context. Cogn. Comput. 2023. [Google Scholar] [CrossRef]
- Pareek, R. Technology and healthcare (machine learning). PC Quest 2018, 31, 50–51. [Google Scholar]
- Chen, S.; Sun, W.; He, Y. Application of Random Forest Regressions on Stellar Parameters of A-type Stars and Feature Extraction. Astron. Astrophys. Res. 2022, 22, 189–194. [Google Scholar] [CrossRef]
- Li, H.; Xia, D.; Wang, Q. A regression model-based cleaning technique for acquisition data. Electro-Opt. Control. 2022, 29, 117–120. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Wang, L.; Wang, T.; Yu, H. Enhancement and extension of forest optimization feature selection algorithm. J. Softw. 2020, 31, 1511–1524. [Google Scholar] [CrossRef]
- Liu, H.; Tao, J.; Qiu, L. Implementation of Python-based One-hot coding. J. Wuhan Shipbuild. Vocat. Technol. Coll. 2021, 20, 136–139. [Google Scholar] [CrossRef]
- Liu, D.; Sun, K. Random forest solar power forecast based on classification optimization. Energy 2019, 187, 115940.1–115940.11. [Google Scholar] [CrossRef]
- Handelman, G.S.; Kok, H.K.; Chandra, R.V.; Razavi, A.H.; Huang, S.; Brooks, M.; Lee, M.J.; Asadi, H. Peering into the Black Box of Artificial Intelligence: Evaluation Metrics of Machine Learning Methods. Am. J. Roentgenol. 2019, 212, 38–43. [Google Scholar] [CrossRef]
- Li, N.; Wang, Y.; Zhou, L.; Zou, C.; Tian, Y.; Guo, N. A random forest detection method for DDoS attacks based on secondary filtering of feature importance. Comput. Sci. 2021, 48, 464–467+476. [Google Scholar] [CrossRef]
- Friedman, J. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Tanveer, M.; Shubham, K.; Aldhaifallah, M.; Ho, S. An efficient regularized K-nearest neighbor based weighted twin support vector regression. Knowl.-Based Syst. 2016, 94, 70–87. [Google Scholar] [CrossRef]
- Lin, Y. An airport track prediction method based on SVR regression. Inf. Commun. 2019, 32, 58–59. [Google Scholar] [CrossRef]
- Chen, R.; Chen, X.; Dong, M.; Liang, J.; Li, Y.; Wang, G.; Liu, X. Machine learning-based lifetime and trajectory prediction of marine buoys. Ocean. Bull. 2021, 40, 262–273. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Horizontal Direction | Up and Down Direction | Left and Right | |
|---|---|---|---|
| R2 score | 0.90 | 0.99 | 0.42 |
| MAE | 0.02 | 0.01 | 0.12 |
| MSE | 0.01 | 0.01 | 0.09 |
| RMSE | 0.06 | 0.04 | 0.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, B.; Zhang, X.; Tang, C.; Wang, X.; Yang, Y.; Xu, W. A Random Forest-Based Method for Predicting Borehole Trajectories. Mathematics 2023, 11, 1297. https://doi.org/10.3390/math11061297
Yan B, Zhang X, Tang C, Wang X, Yang Y, Xu W. A Random Forest-Based Method for Predicting Borehole Trajectories. Mathematics. 2023; 11(6):1297. https://doi.org/10.3390/math11061297
Chicago/Turabian StyleYan, Baoyong, Xiantao Zhang, Chengxu Tang, Xiao Wang, Yifei Yang, and Weihua Xu. 2023. "A Random Forest-Based Method for Predicting Borehole Trajectories" Mathematics 11, no. 6: 1297. https://doi.org/10.3390/math11061297
APA StyleYan, B., Zhang, X., Tang, C., Wang, X., Yang, Y., & Xu, W. (2023). A Random Forest-Based Method for Predicting Borehole Trajectories. Mathematics, 11(6), 1297. https://doi.org/10.3390/math11061297