

Determining Unintentional Island Threshold to Enhance the Reliability in an Electrical Distribution Grid
 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
- A distribution and utility bus voltage angle difference-based island threshold technique has been proposed;
- The proposed technique has been evaluated under two different islanding conditions and those are under frequency and over frequency;
- To assess the performance under different islanding scenarios there are four different islanding scenarios for the under frequency and over frequency islanding conditions;
- All the islanding scenarios have been taken from the real-time problem of a distribution system named Utility Kerteh which is located in the Terengganu state in Malaysia.
- The proposed technique is able to detect island thresholds within 40 ms to 80 ms depending on the scenarios which state that it can contribute to increasing the distribution system reliability or security in terms of detection time.
2. Methodology and Test System
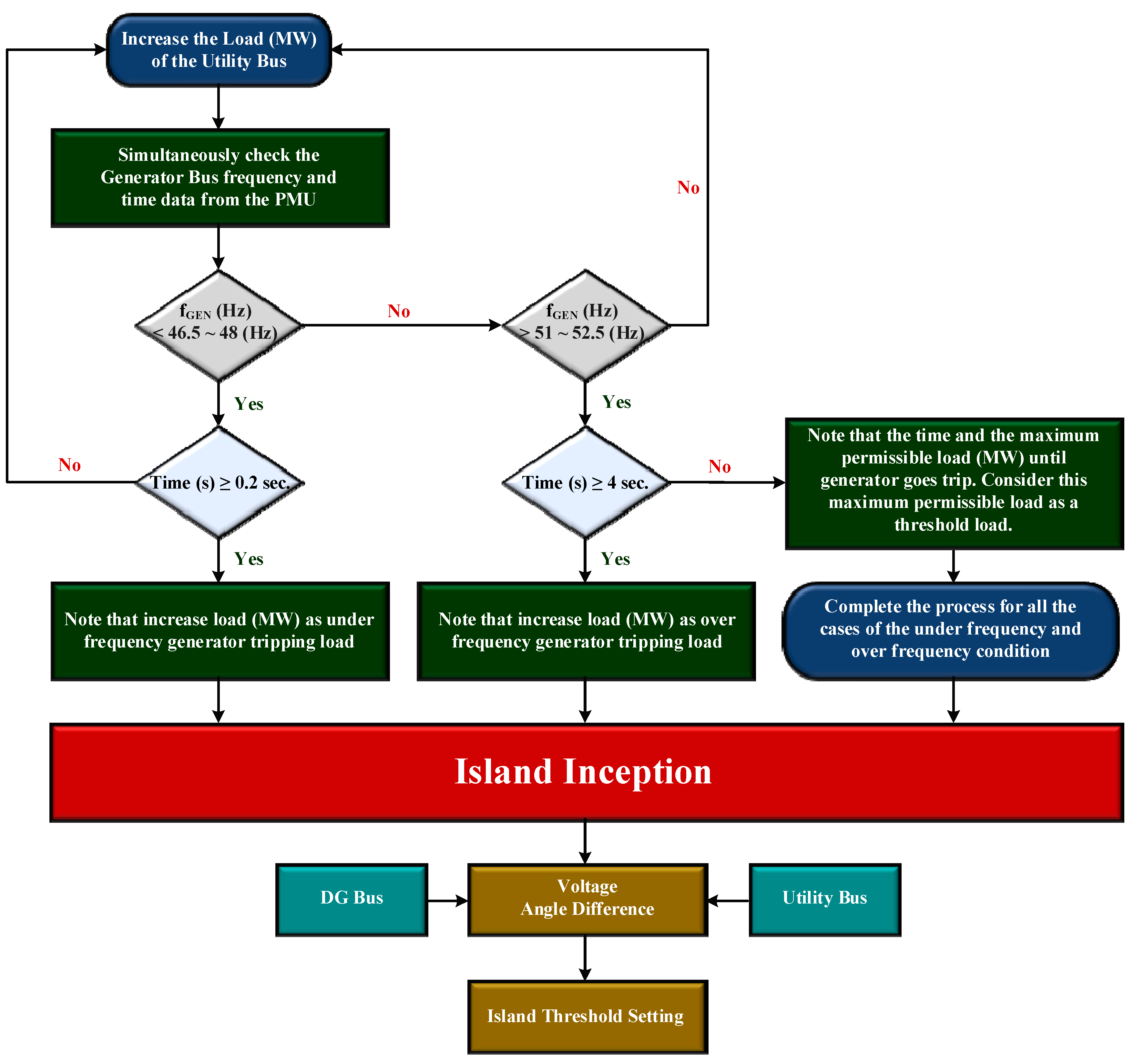
2.1. Proposed Methodology
- (a)
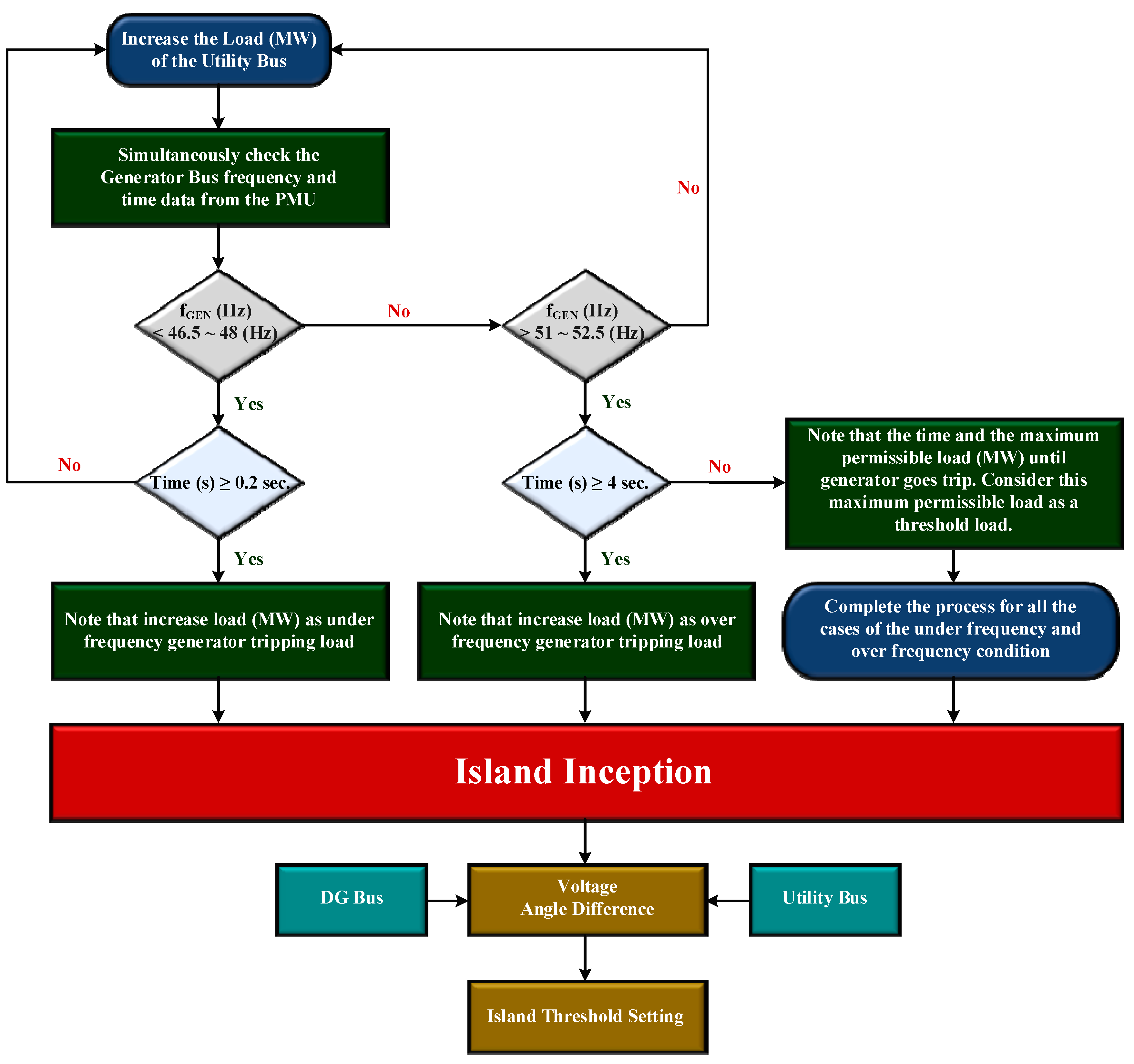
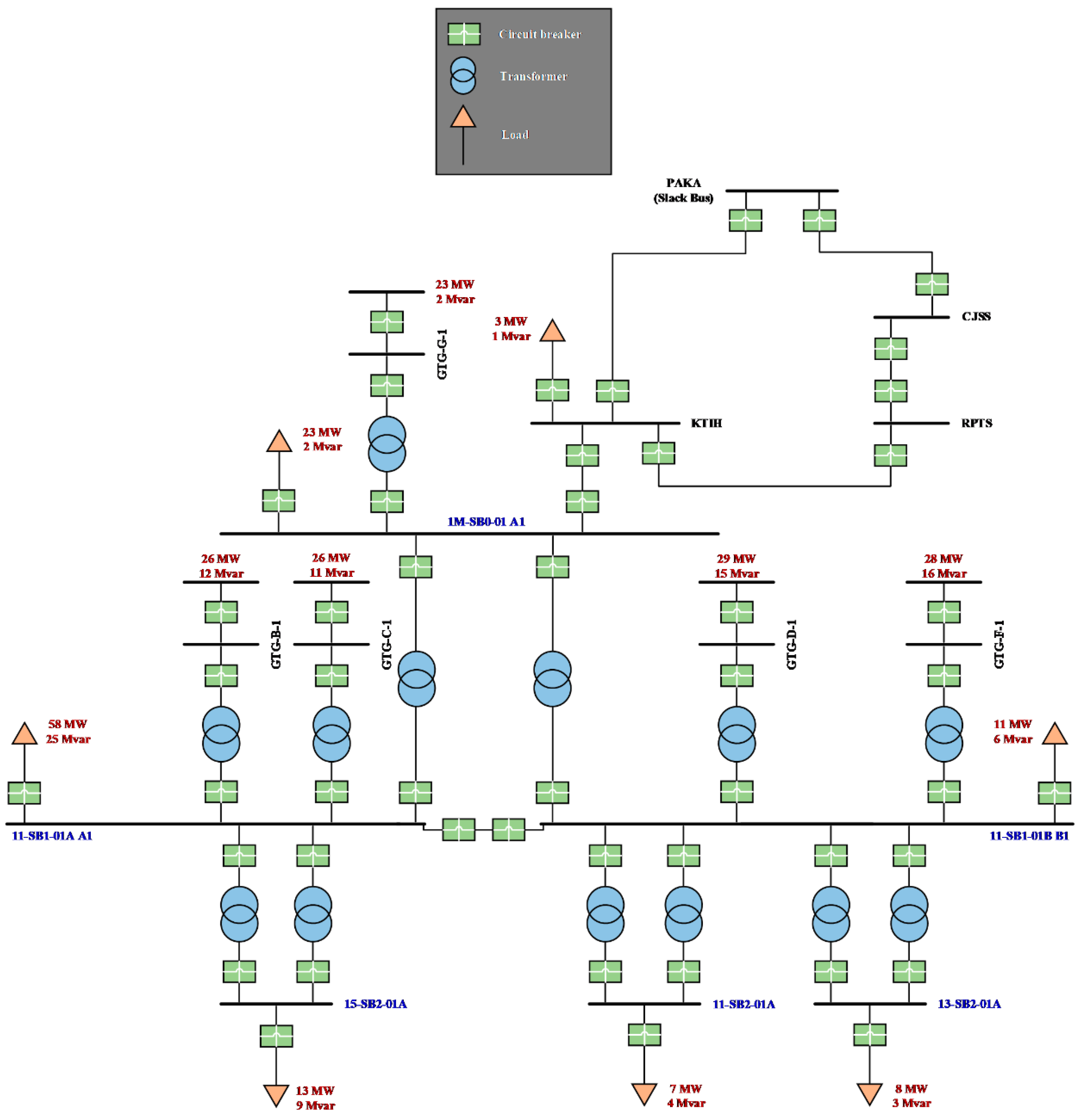
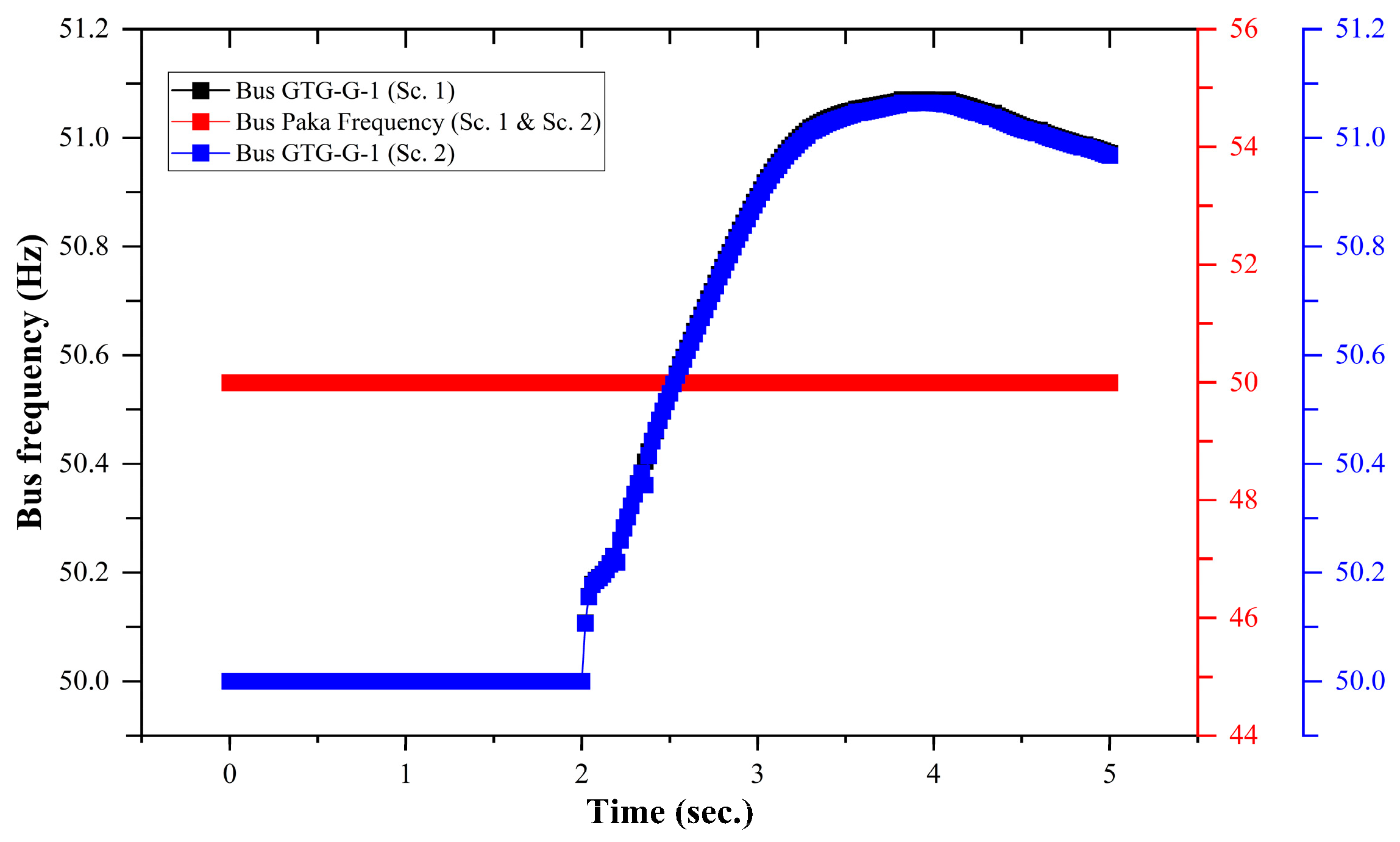
- It is necessary to understand those buses we may utilize in calculations during establishing the threshold of the under frequency and over frequency island conditions. Two buses are shown in Figure 1, one of which is a utility bus and the other is a DG bus. In this study, we employed the Utility Kerteh system, which has five DG buses. In this study, Bus GTG-G-1 (11 KV) was considered a DG bus;
- (b)
- Different load levels lead to various network configurations and the load needs to be raised until the generator is unable to synchronize anymore, as shown in Figure 1. However, the over frequency tripping time of the generator is 4 s when the frequency is greater than 51~52.5 Hz, while the condition of under frequency permits the generator to trip 0.2 s at a frequency below 46.5~48 Hz [24]. From there, only an acceptable load may be established for under and over frequency situations.
- (c)
- Islanding happens when loads and generators are cut off outside of the utility system but still have power [4]. Voltage and frequency variations lead to declining power quality and synchronization difficulties on the electric grid.
- (d)
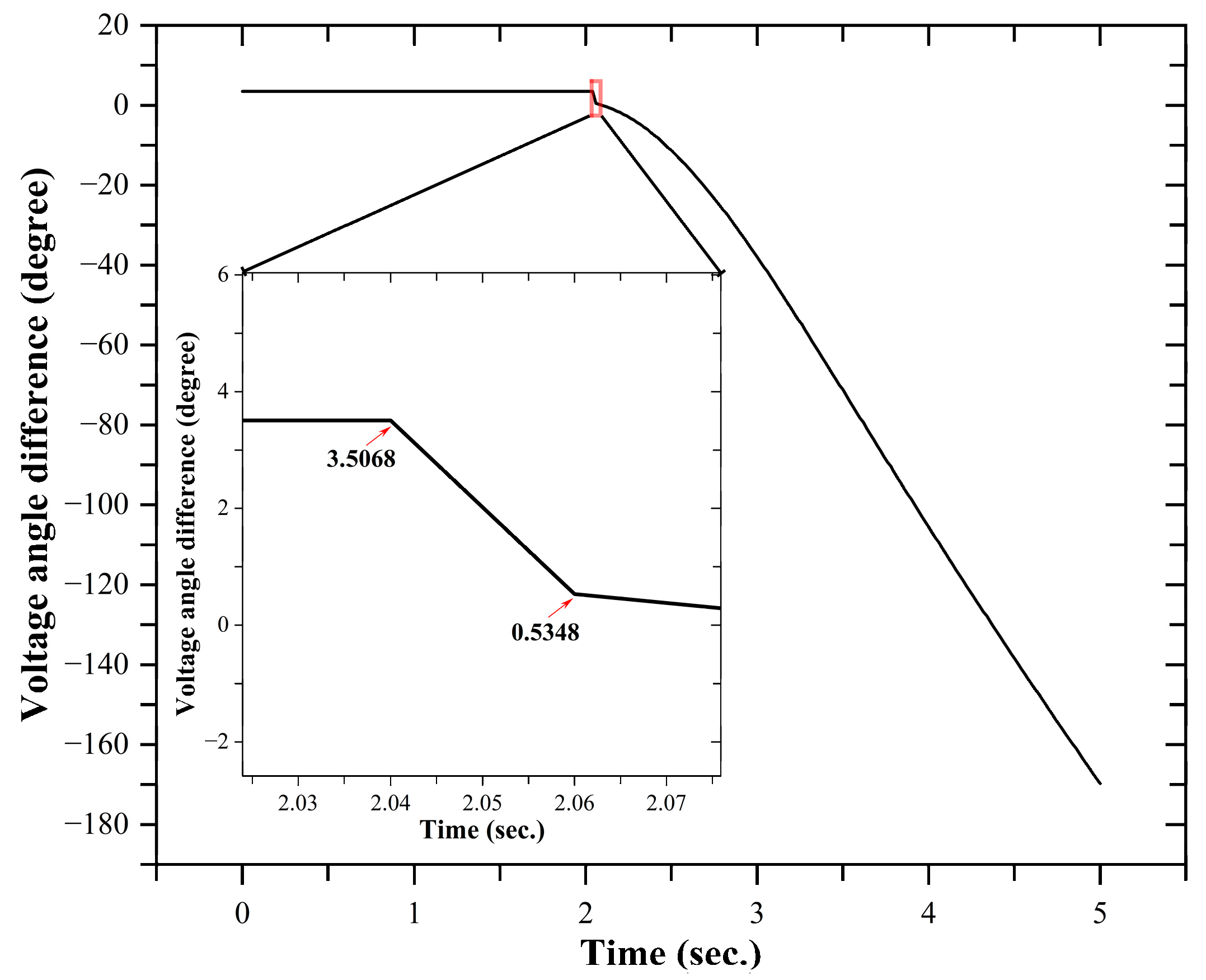
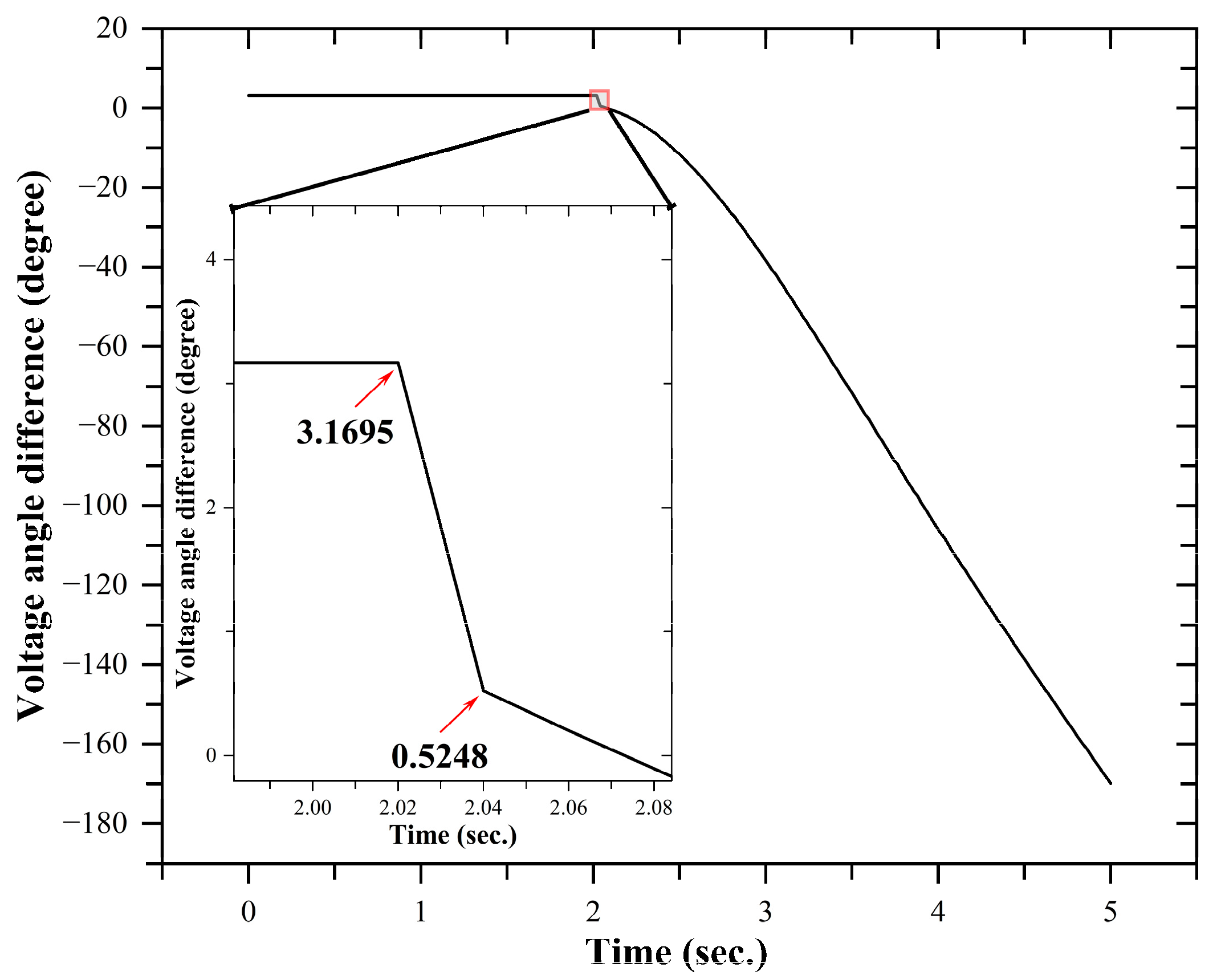
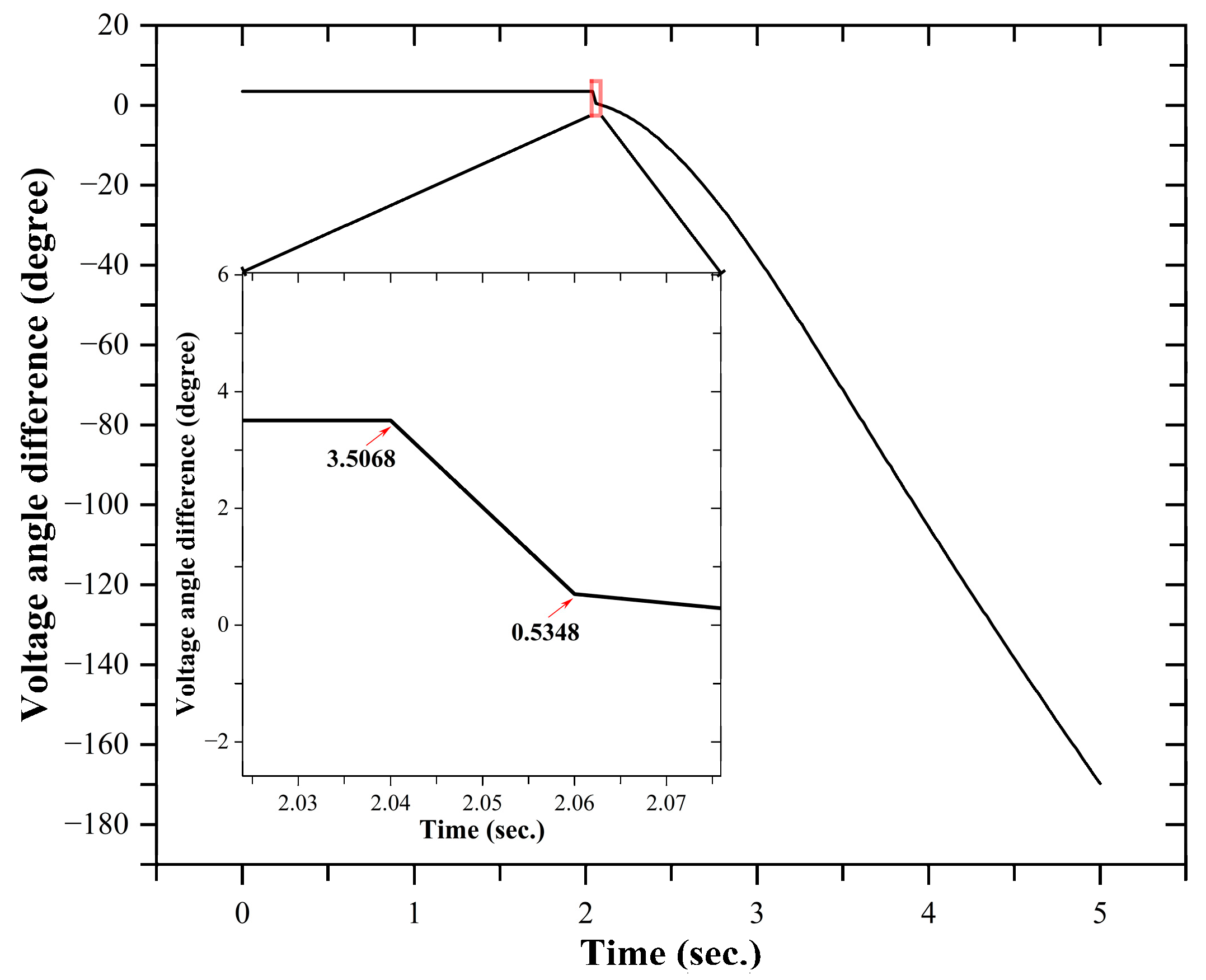
- Voltage angle difference should be calculated from the DG bus and utility bus voltage angle.
- (e)
- A threshold value for every scenario of the island that will be able to operate in both island conditions may be defined once all of the PMU voltage angle differences have been determined from step (d).
2.2. Voltage Angle Formulation of the DG and Utility Bus
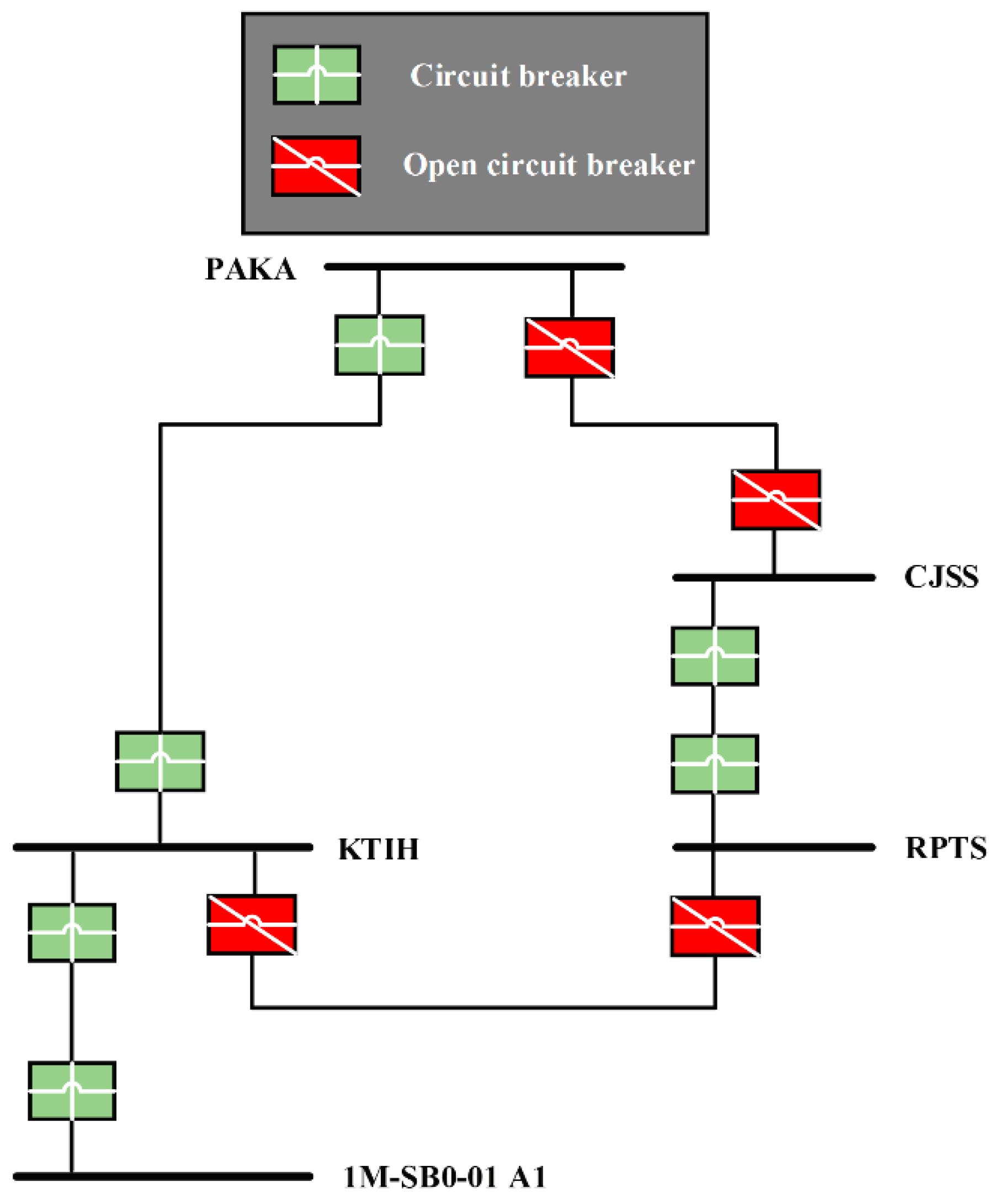
2.3. Test System
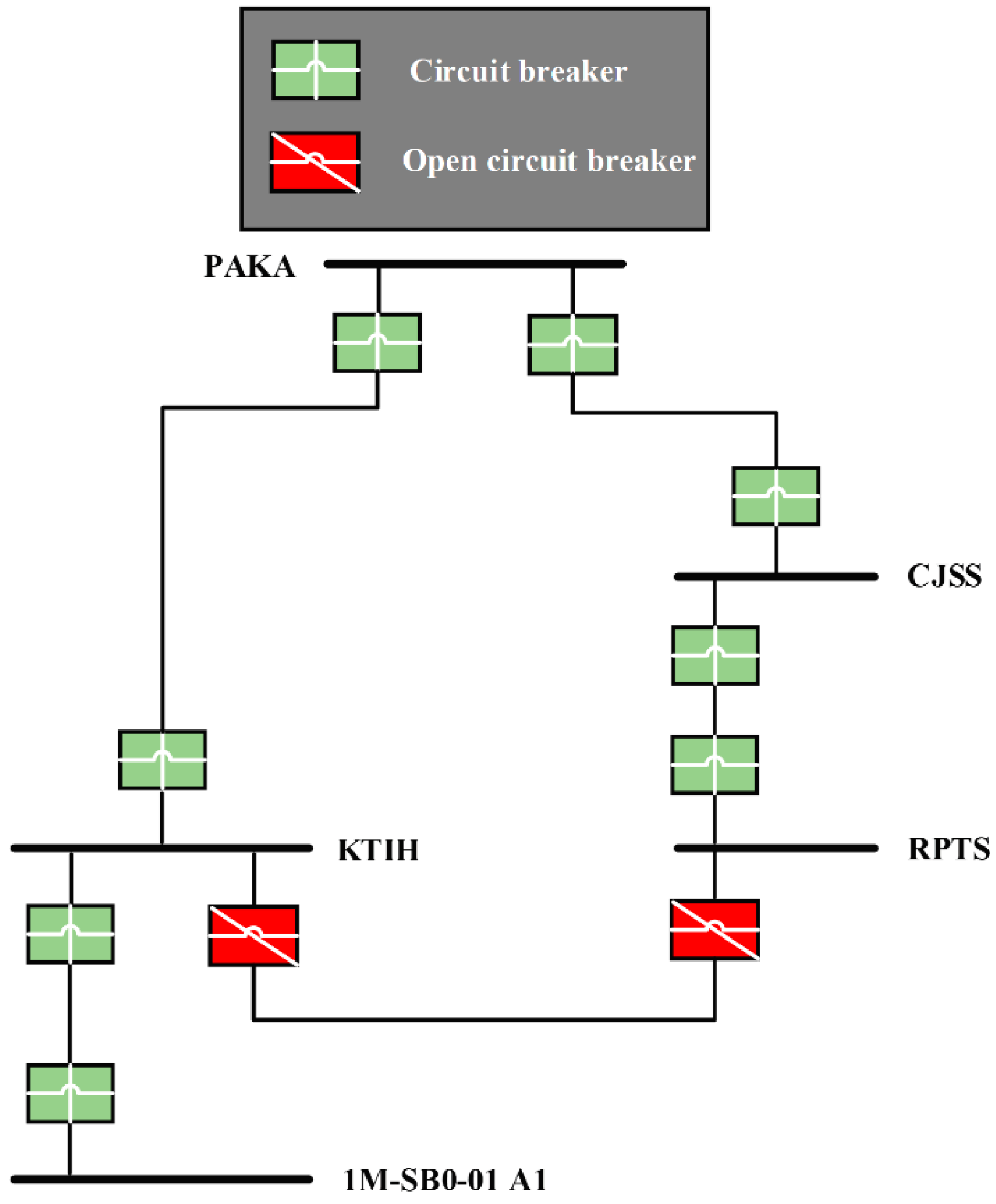
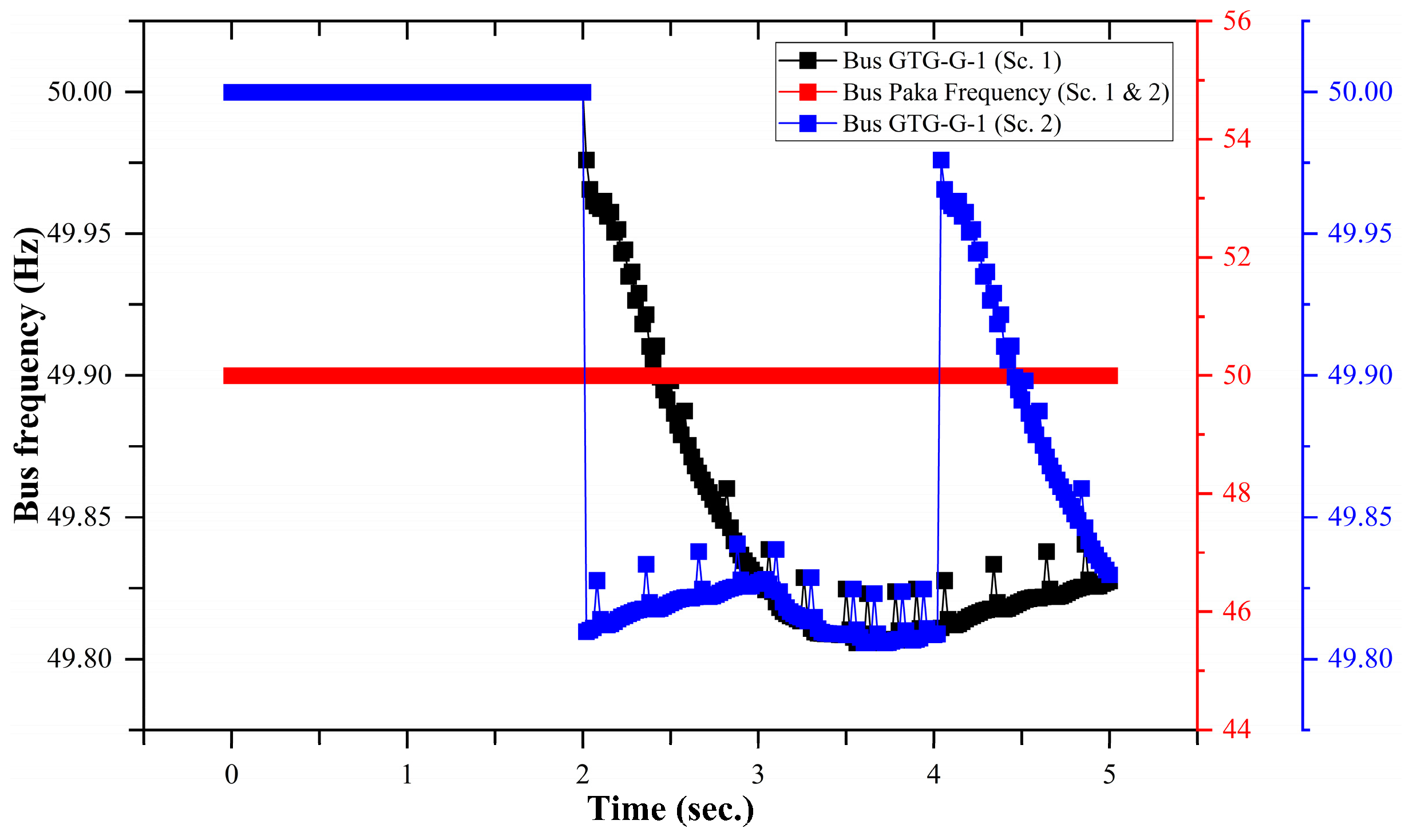
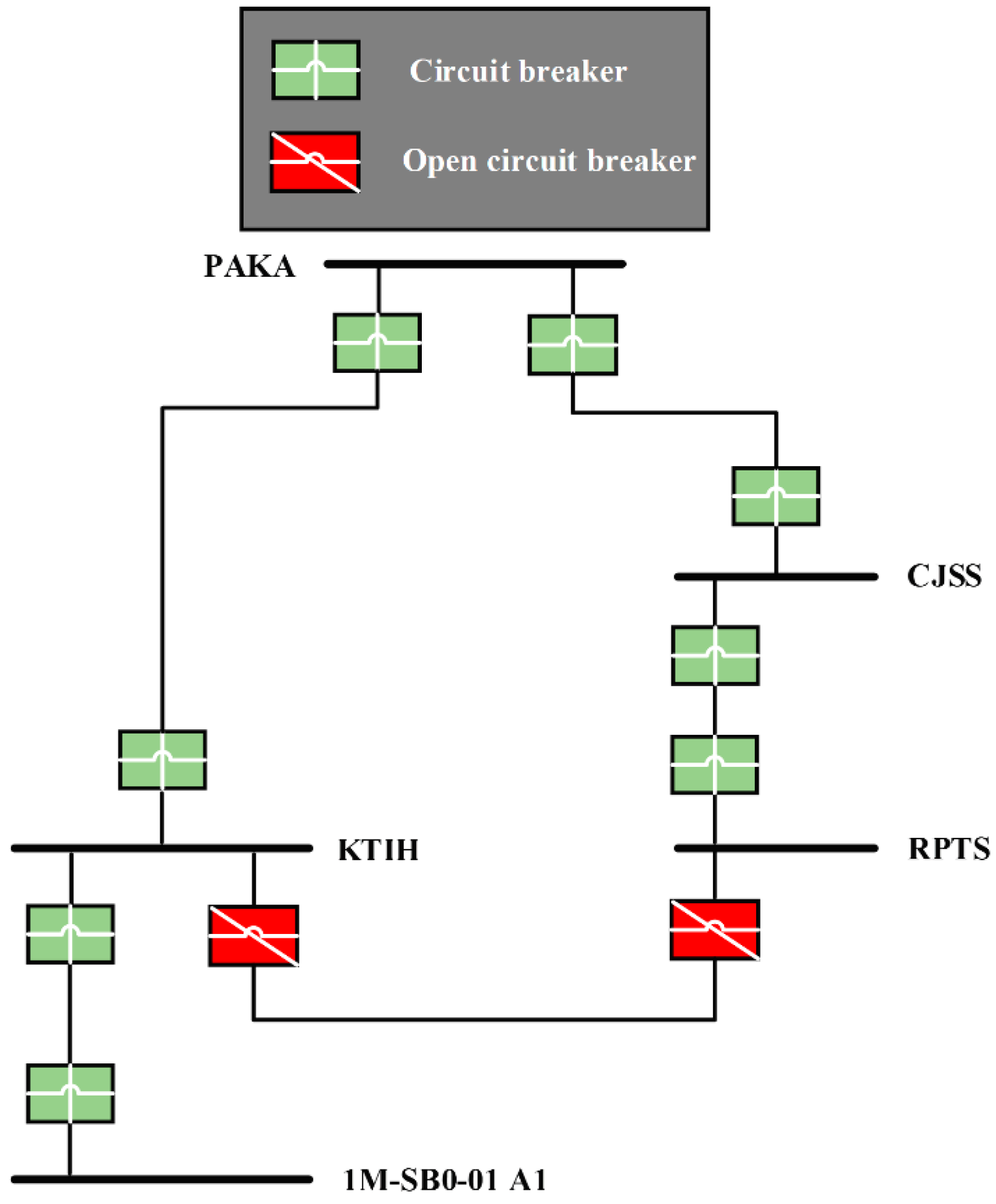
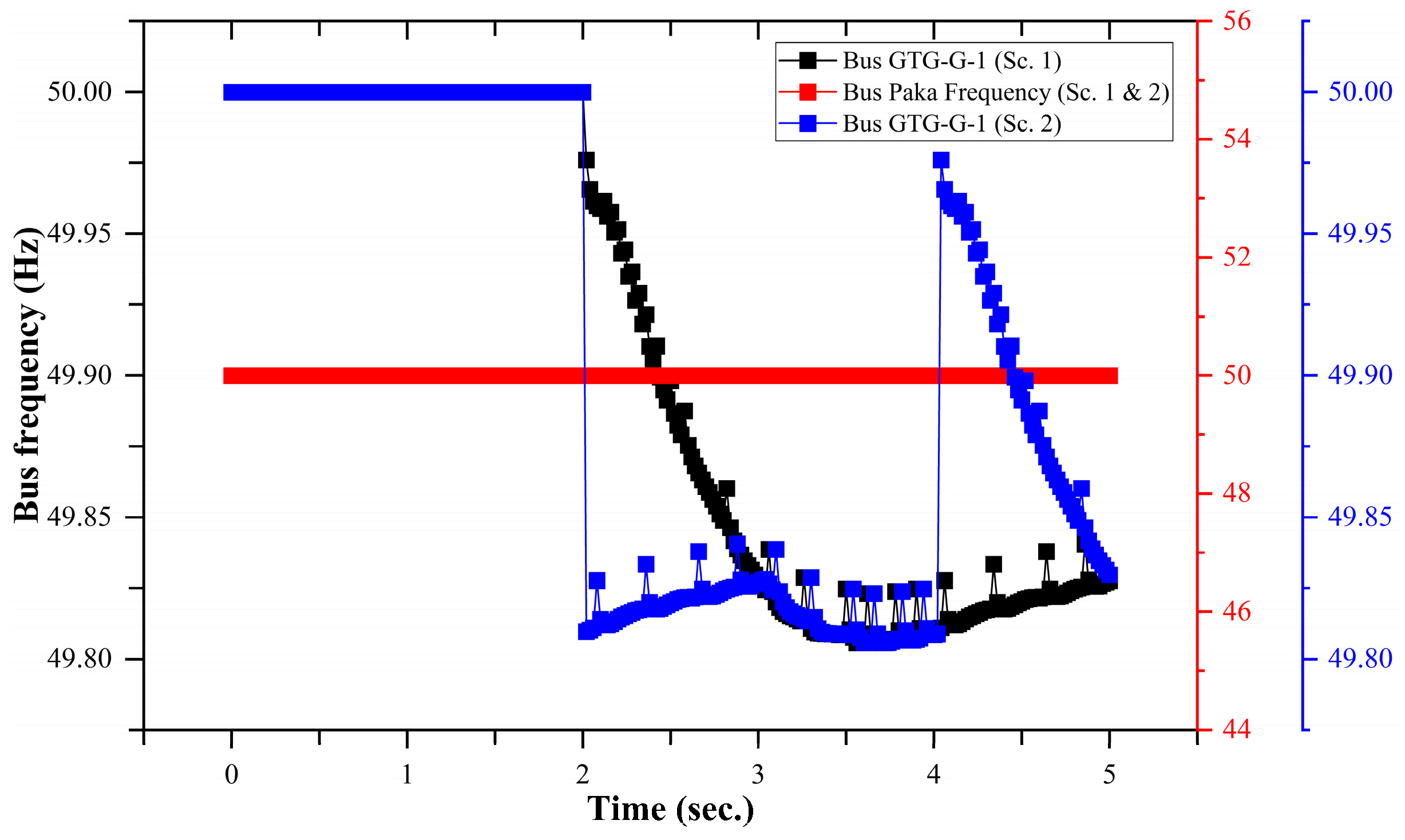
- Scenario 1 (Sc. 1): the transmission line between PAKA and KTIH is open while the RPTS to KTIH line is on outage (Figure 3).
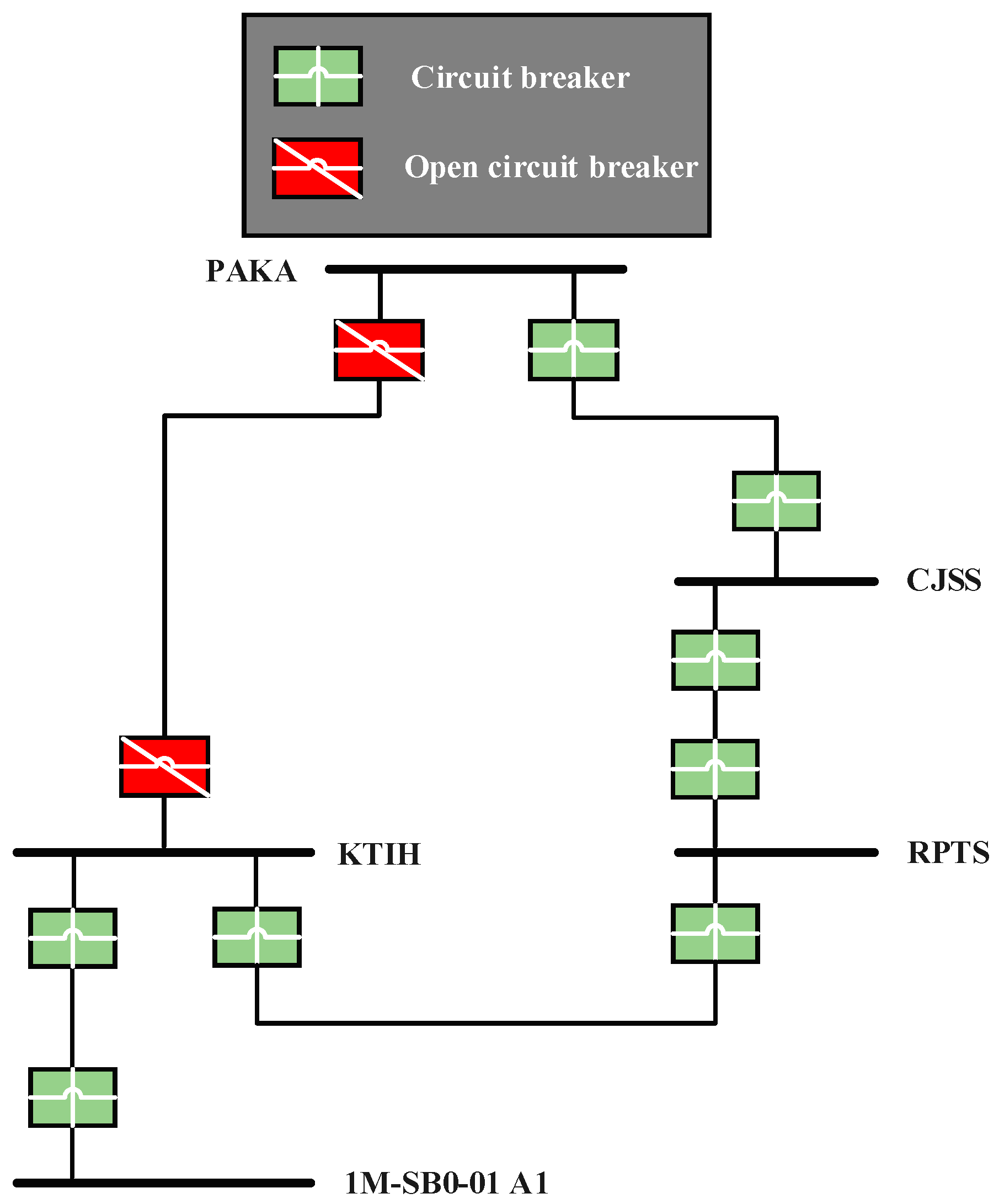
- Scenario 2 (Sc. 2): the transmission line between RPTS and KTIH is open while the PAKA to KTIH transmission line is on outage (Figure 4).
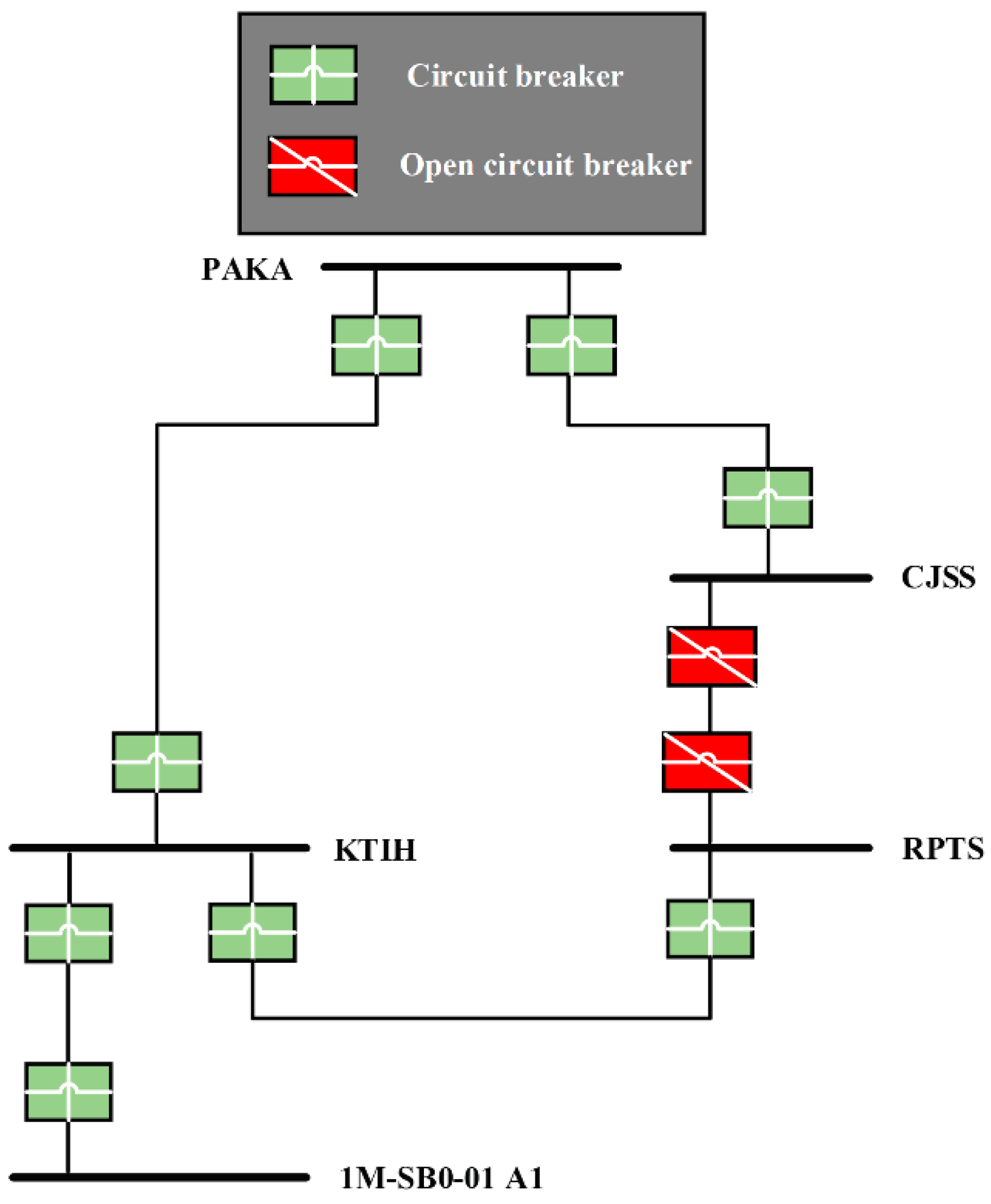
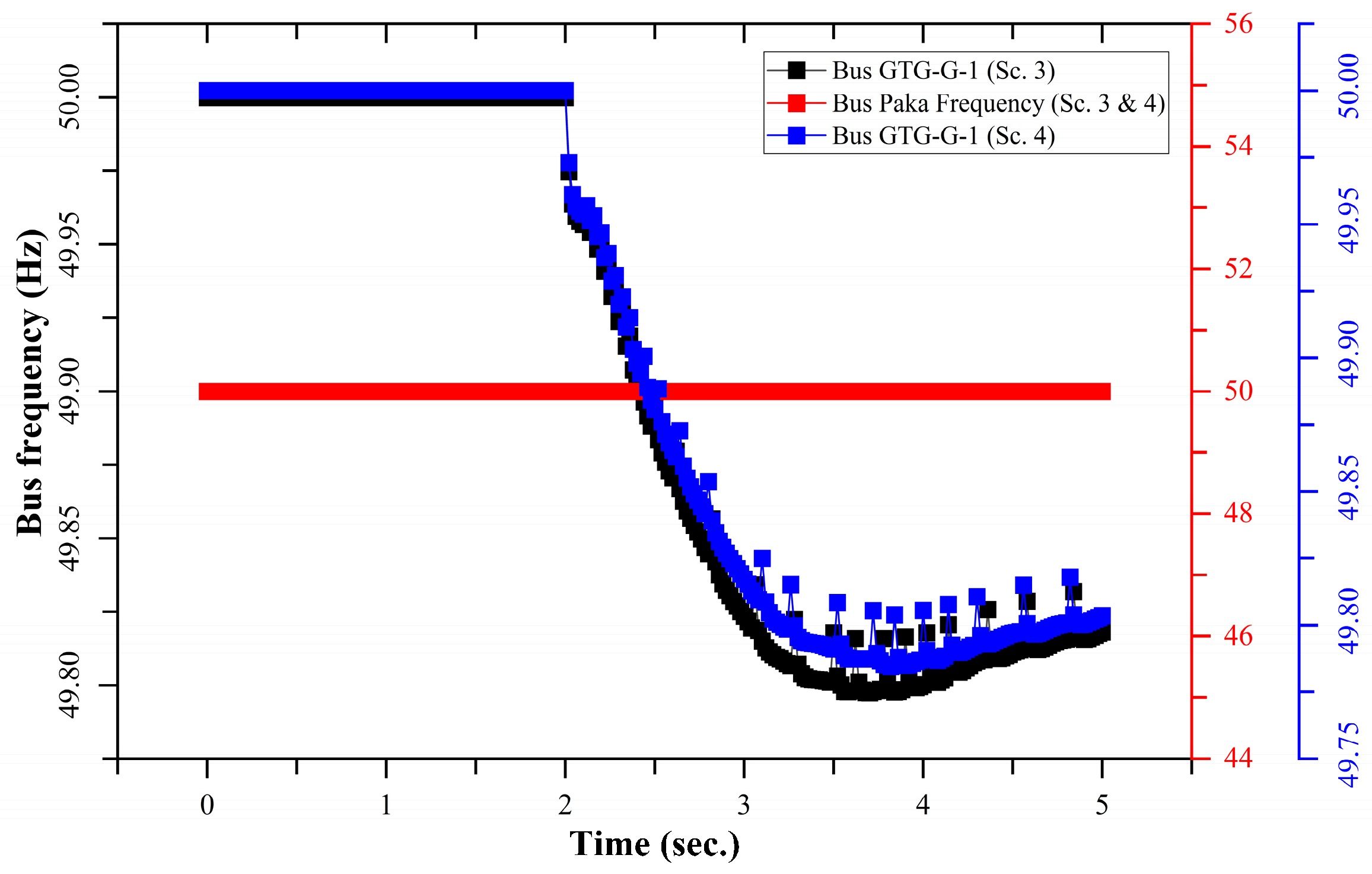
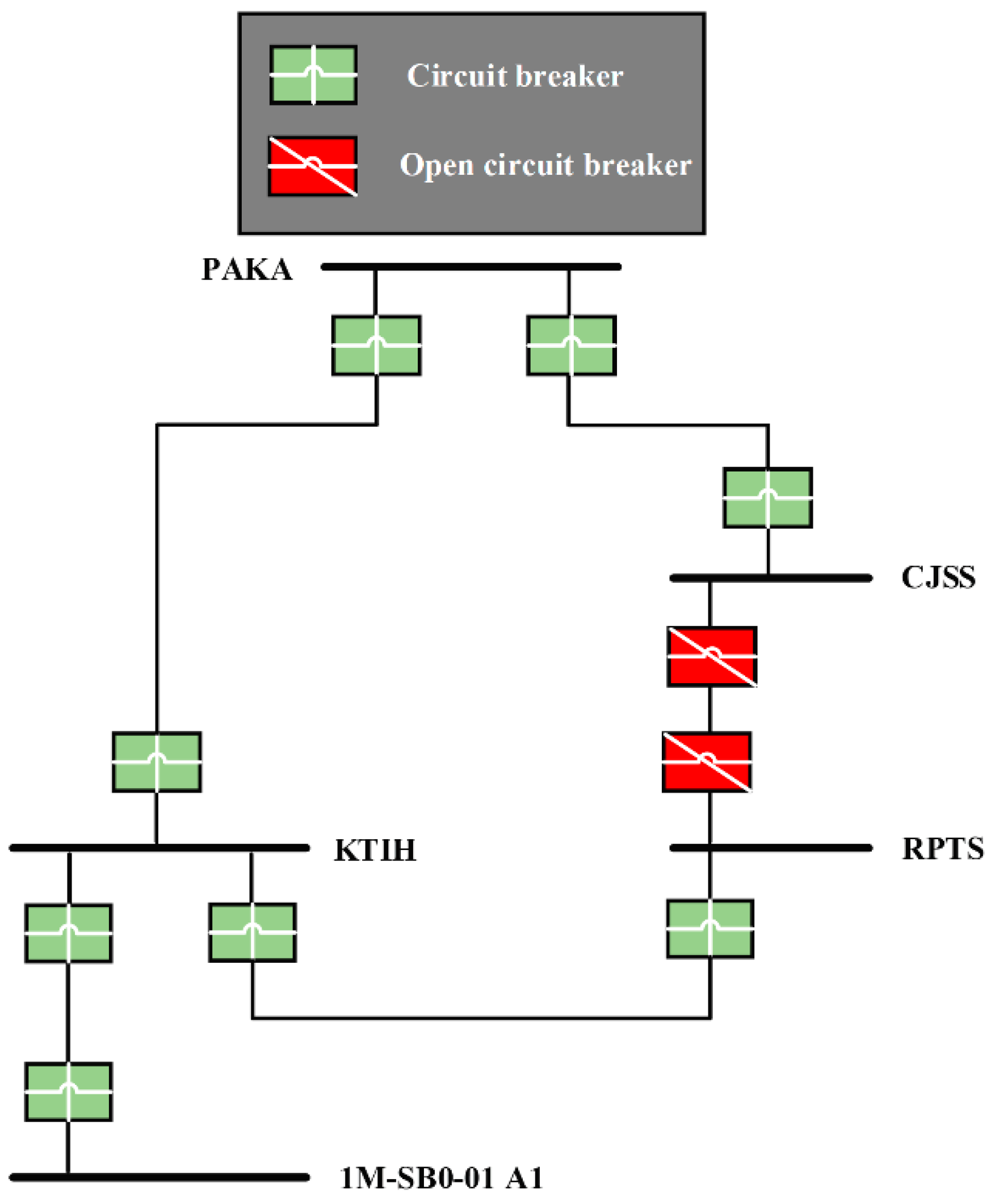
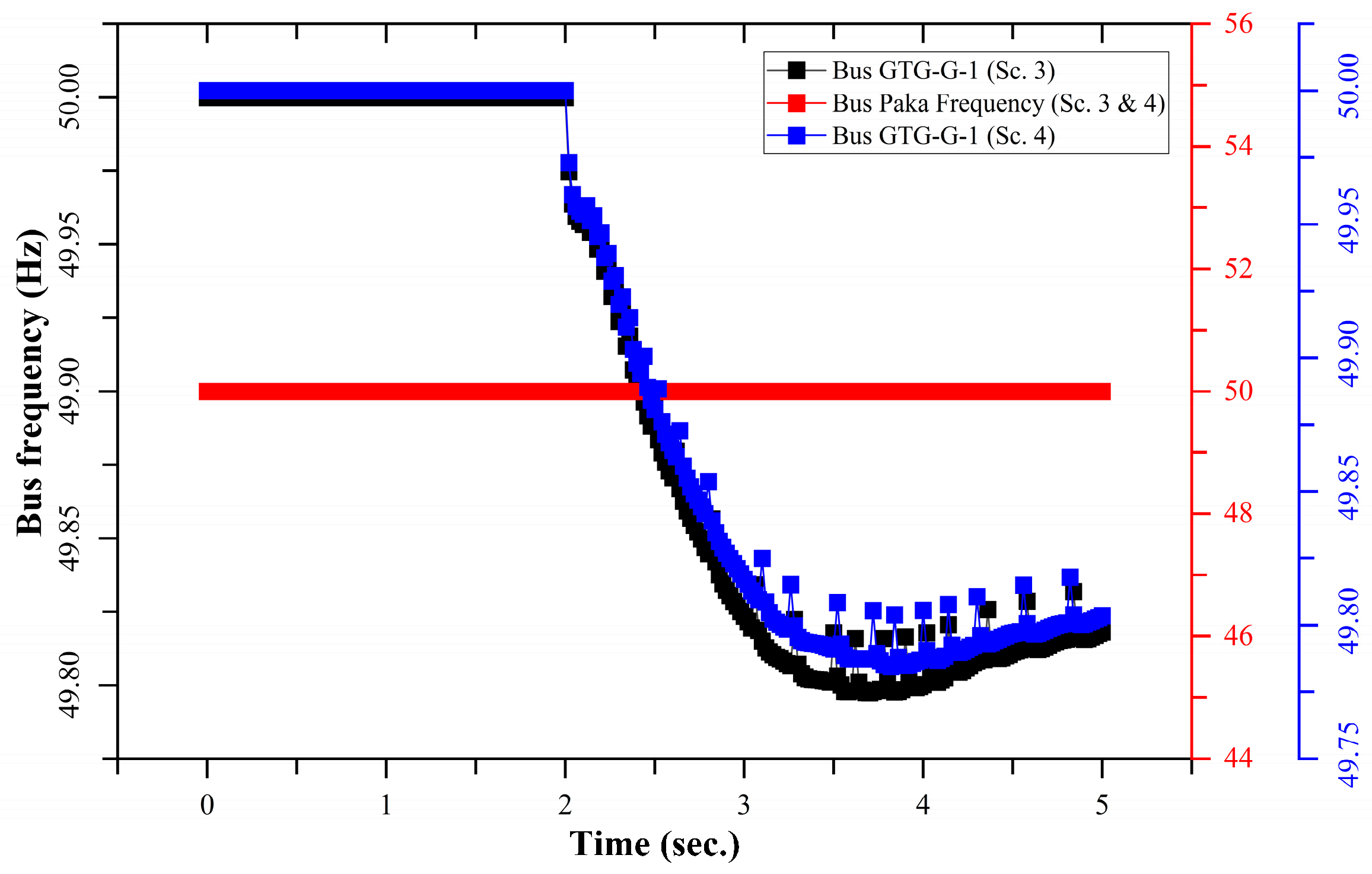
- Scenario 3 (Sc. 3): the transmission line between CJSS and RPTH is open while the PAKA to KTIH transmission line is on outage (Figure 5).
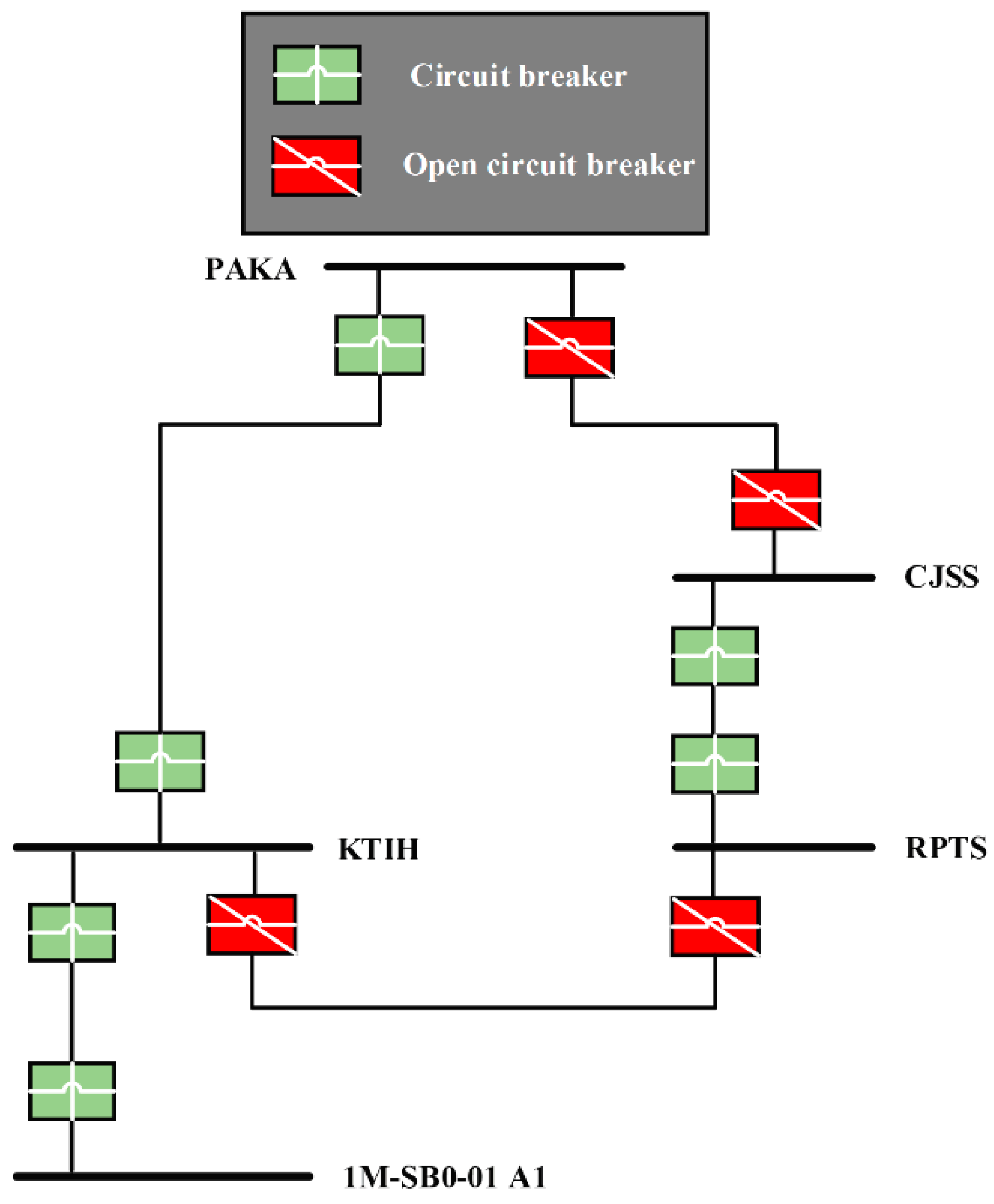
- Scenario 4 (Sc. 4): the transmission line between PAKA and CJSS is open and RPTS to KTIH is open while the PAKA to KTIH transmission line is on outage (Figure 6).
3. Results Analysis and Discussions
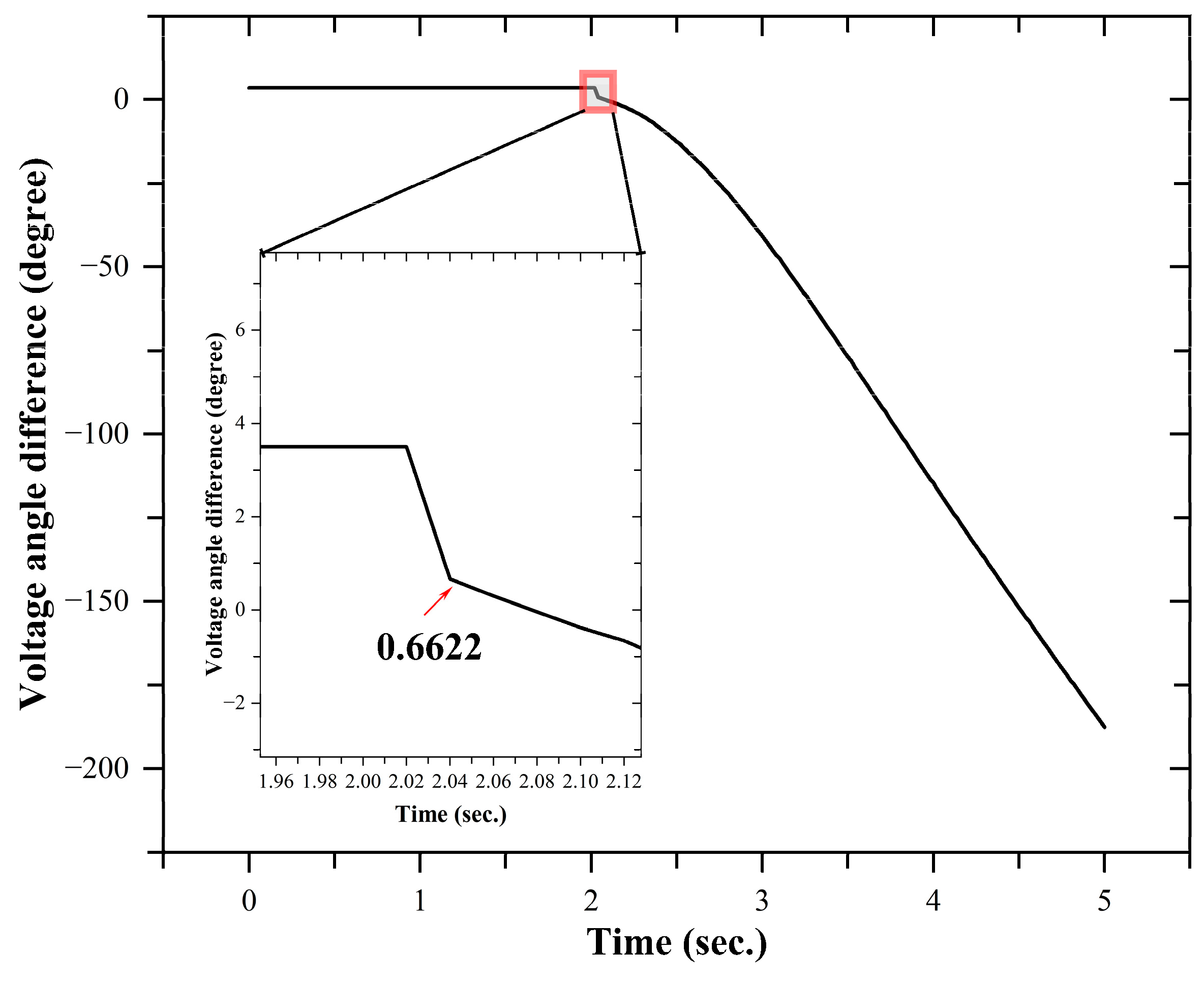
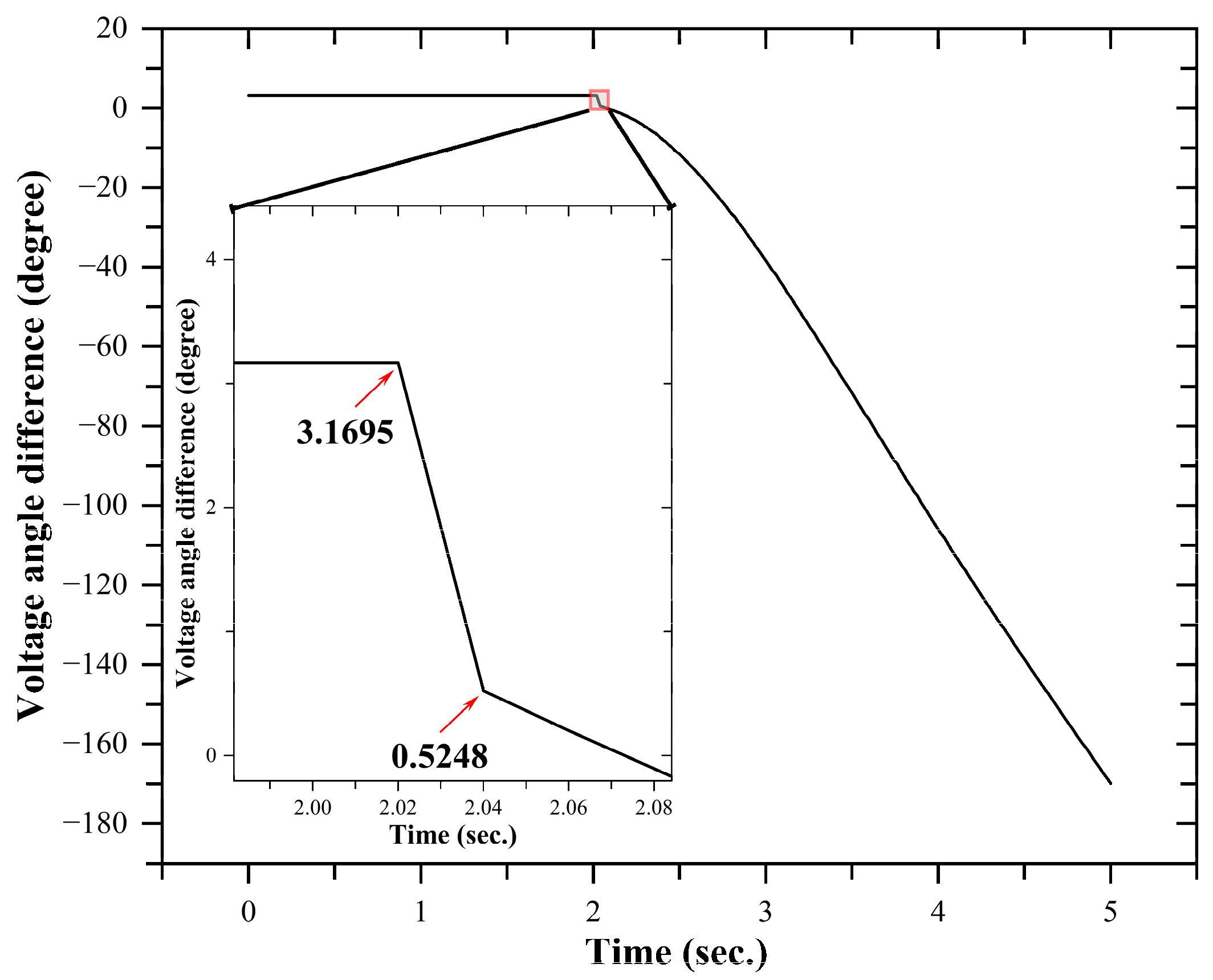
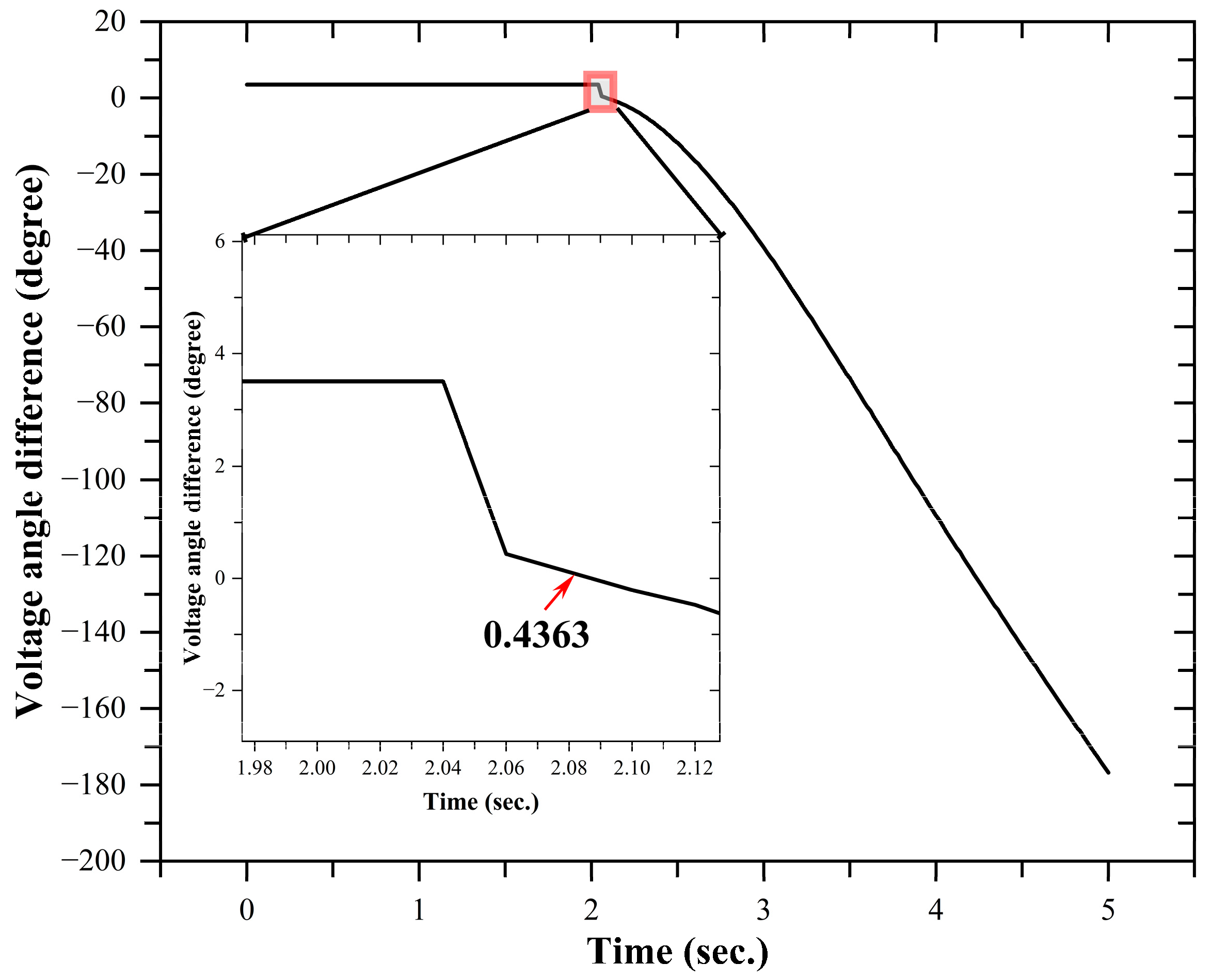
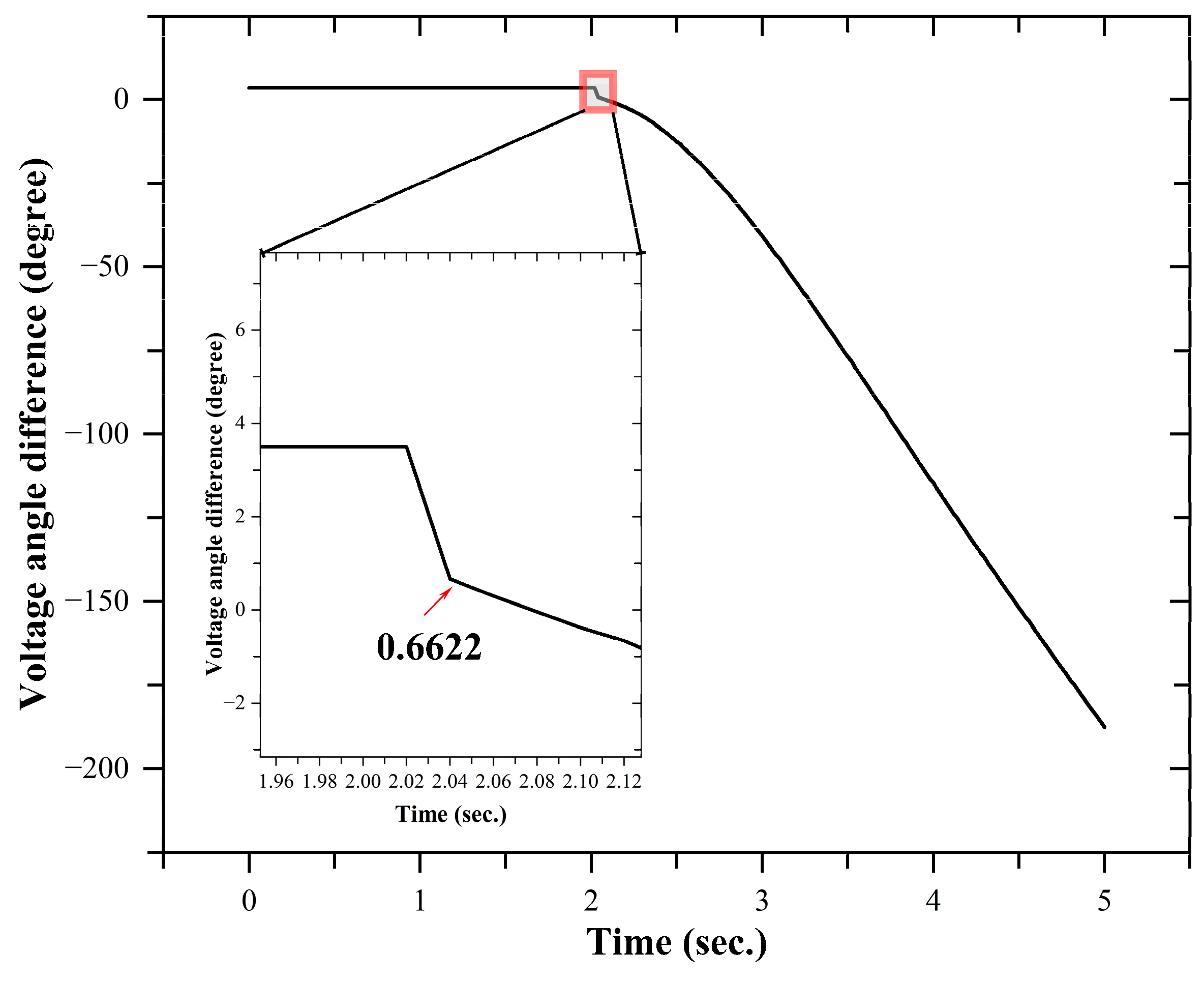
3.1. Under Frequency
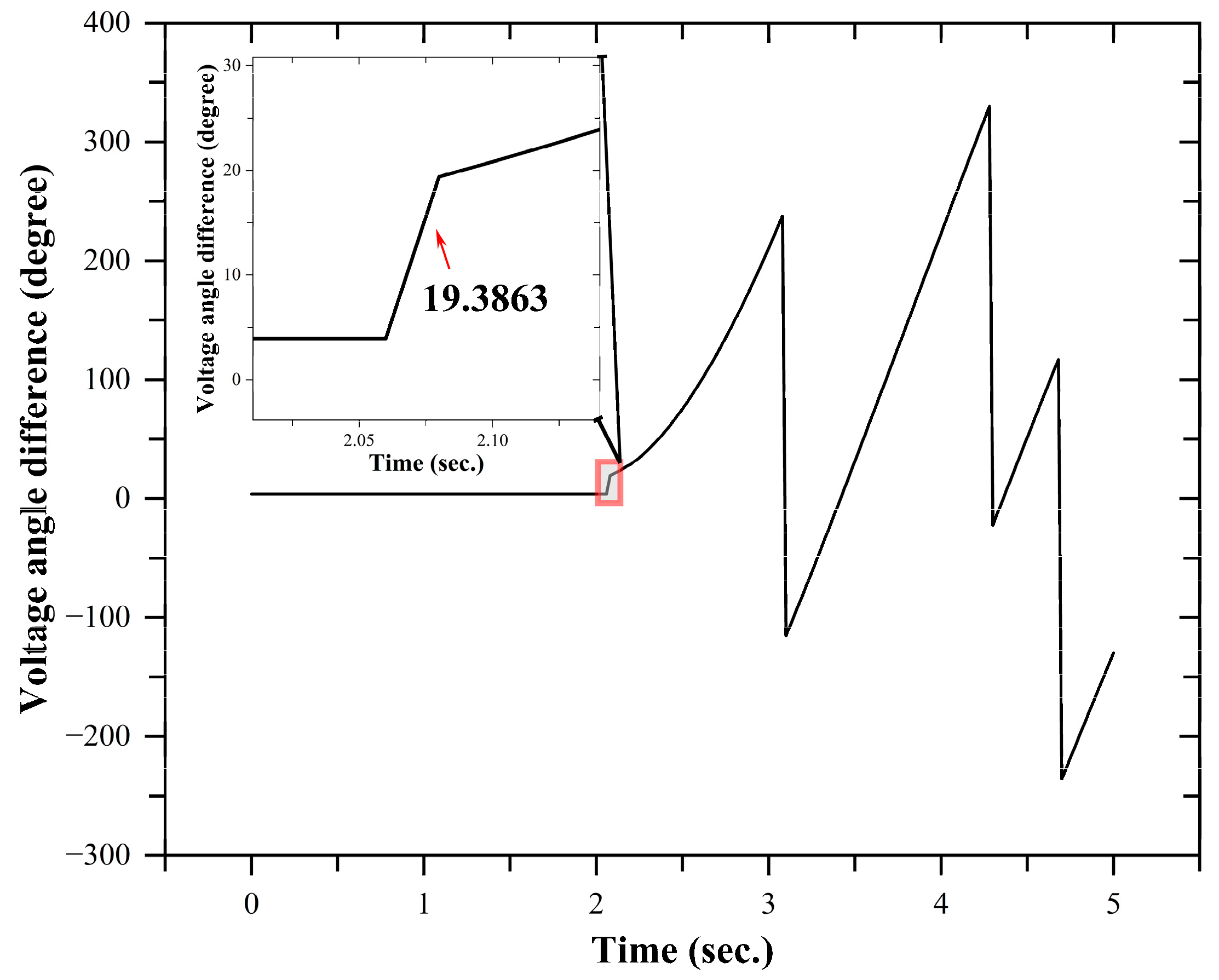
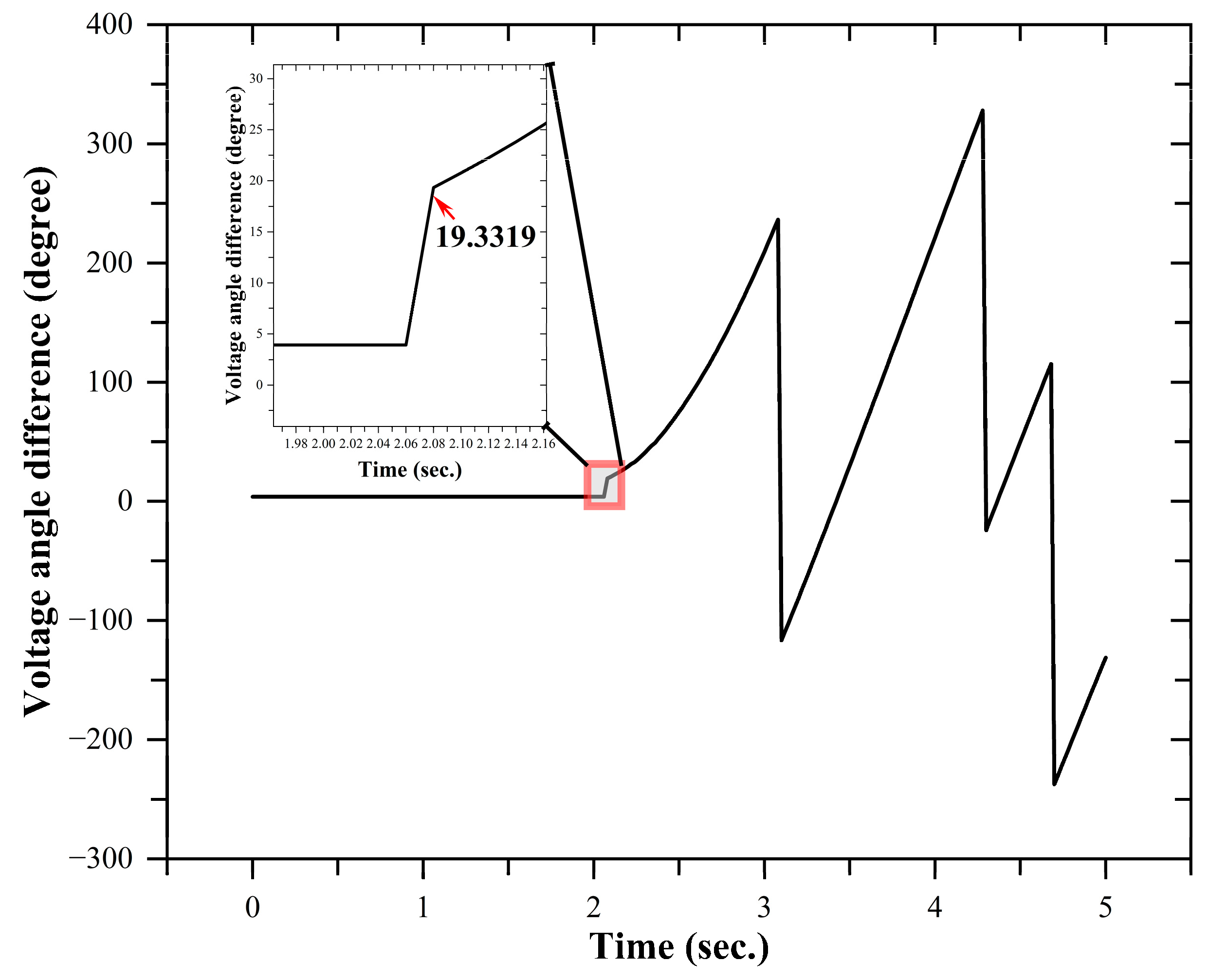
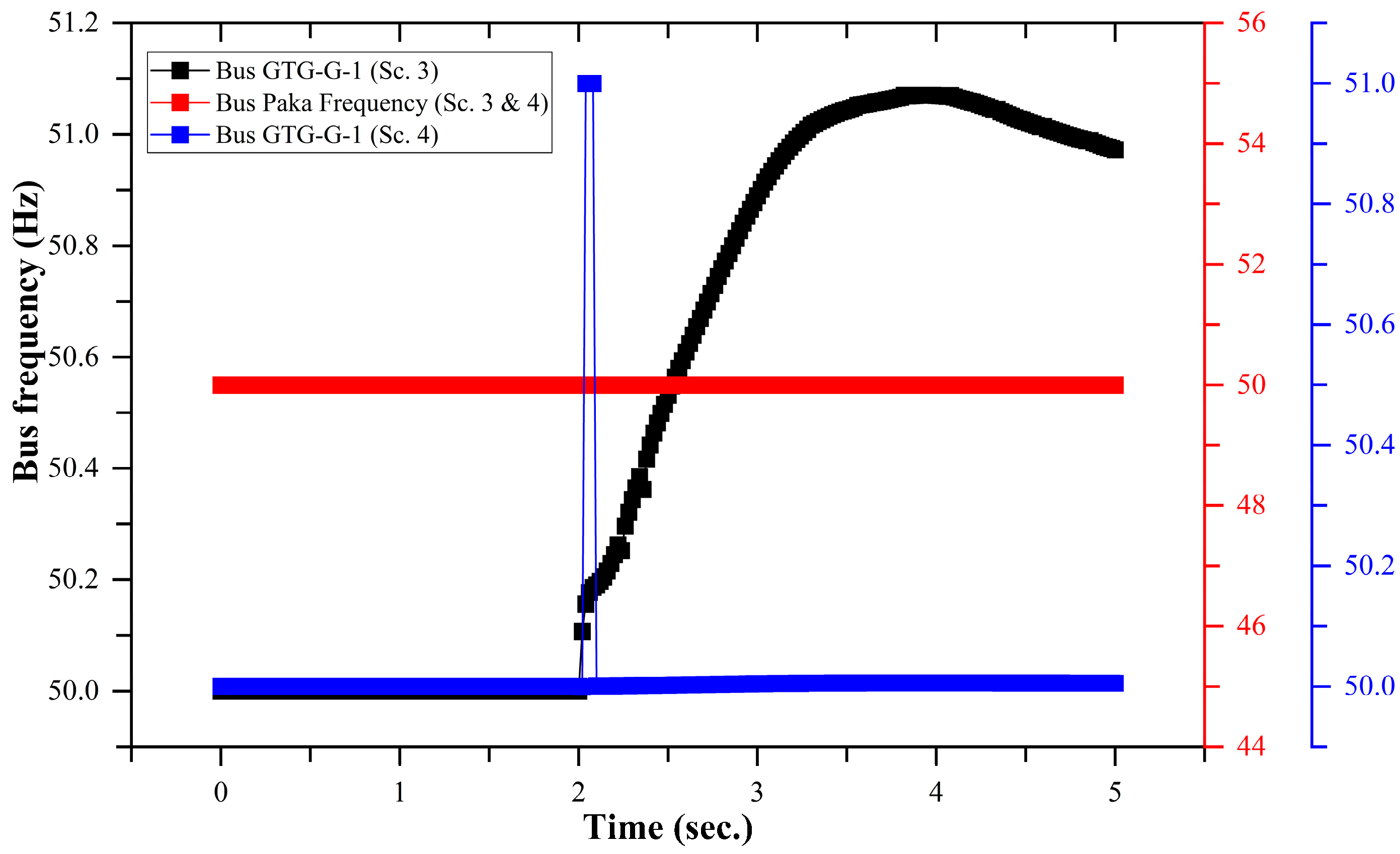
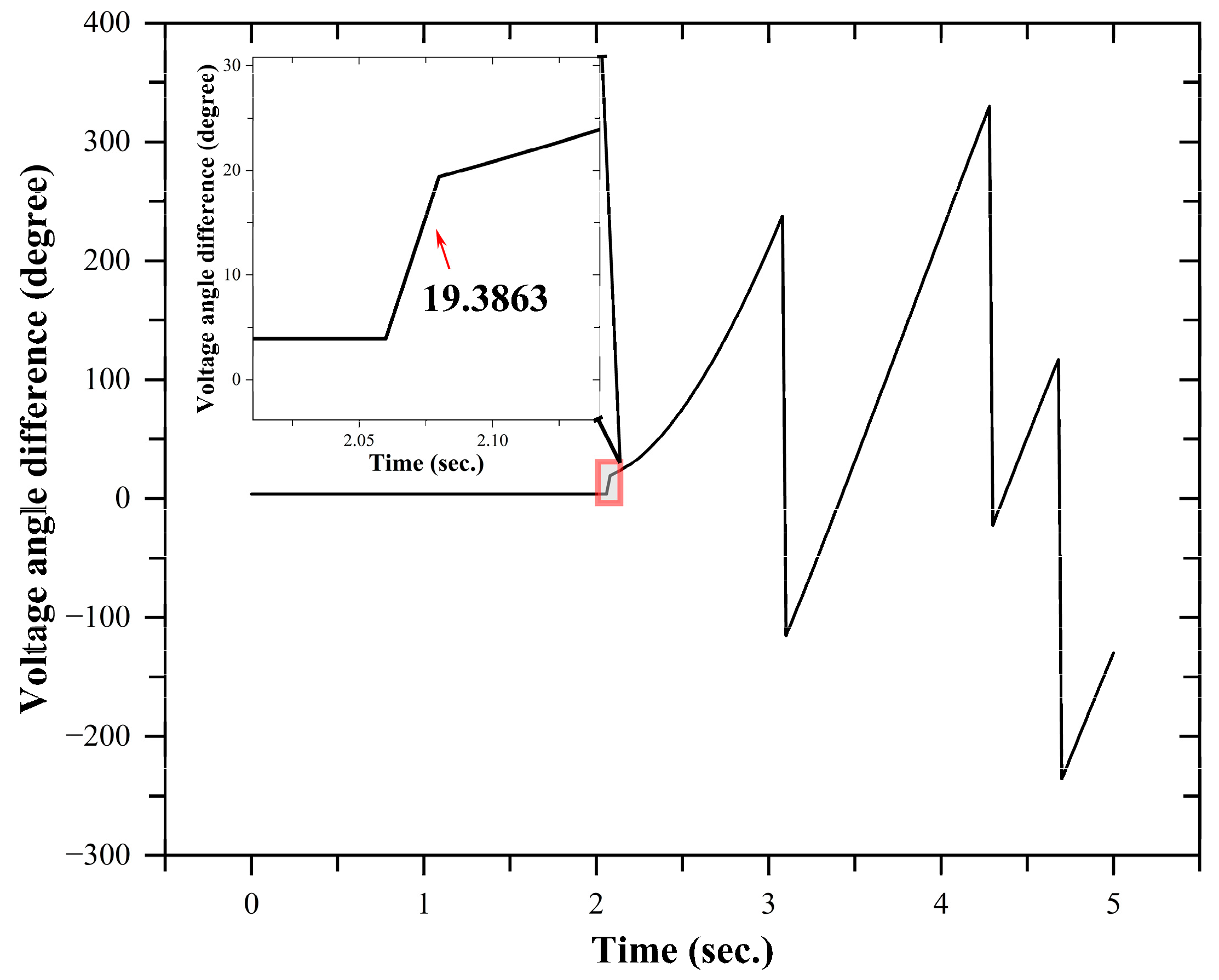
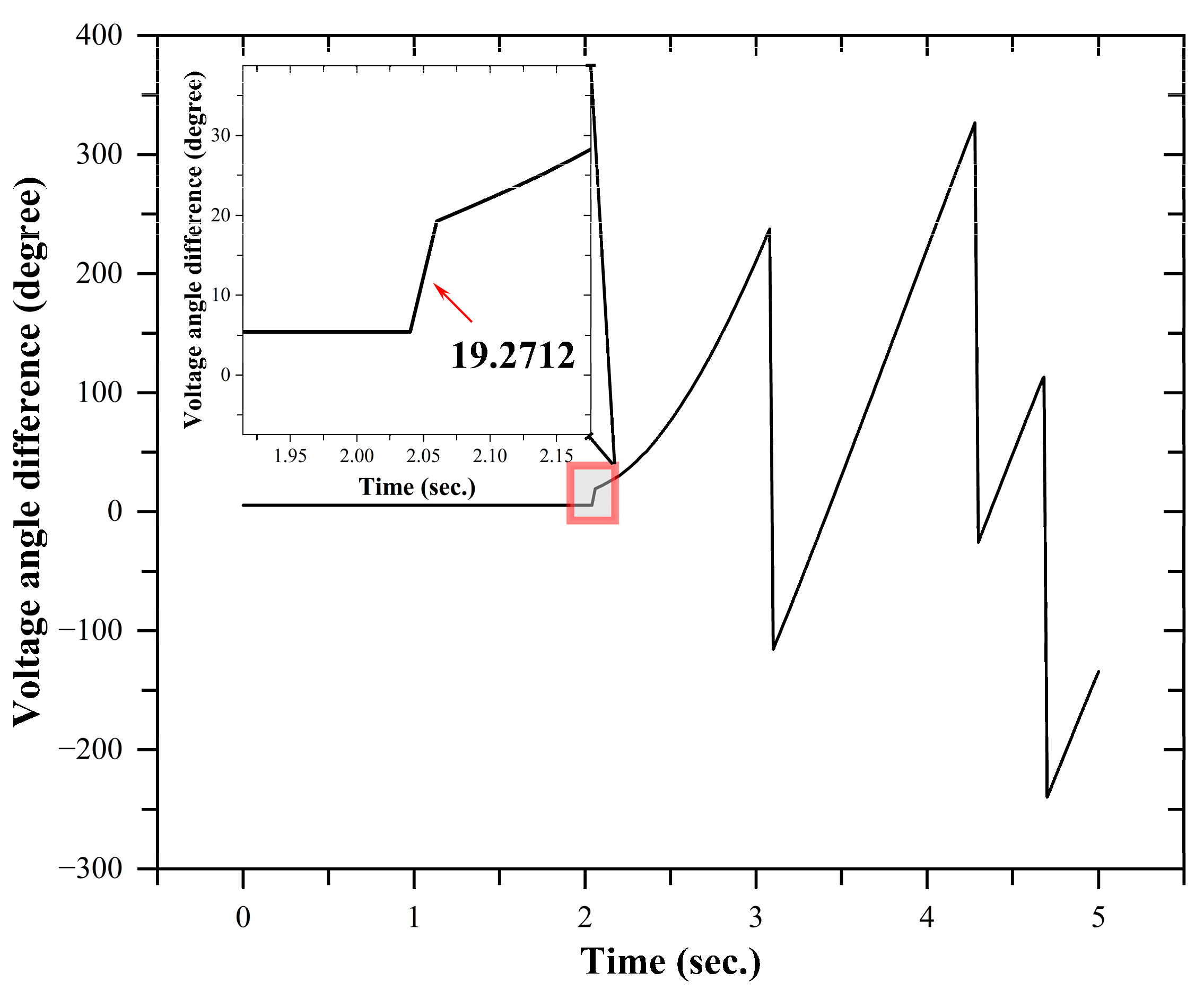
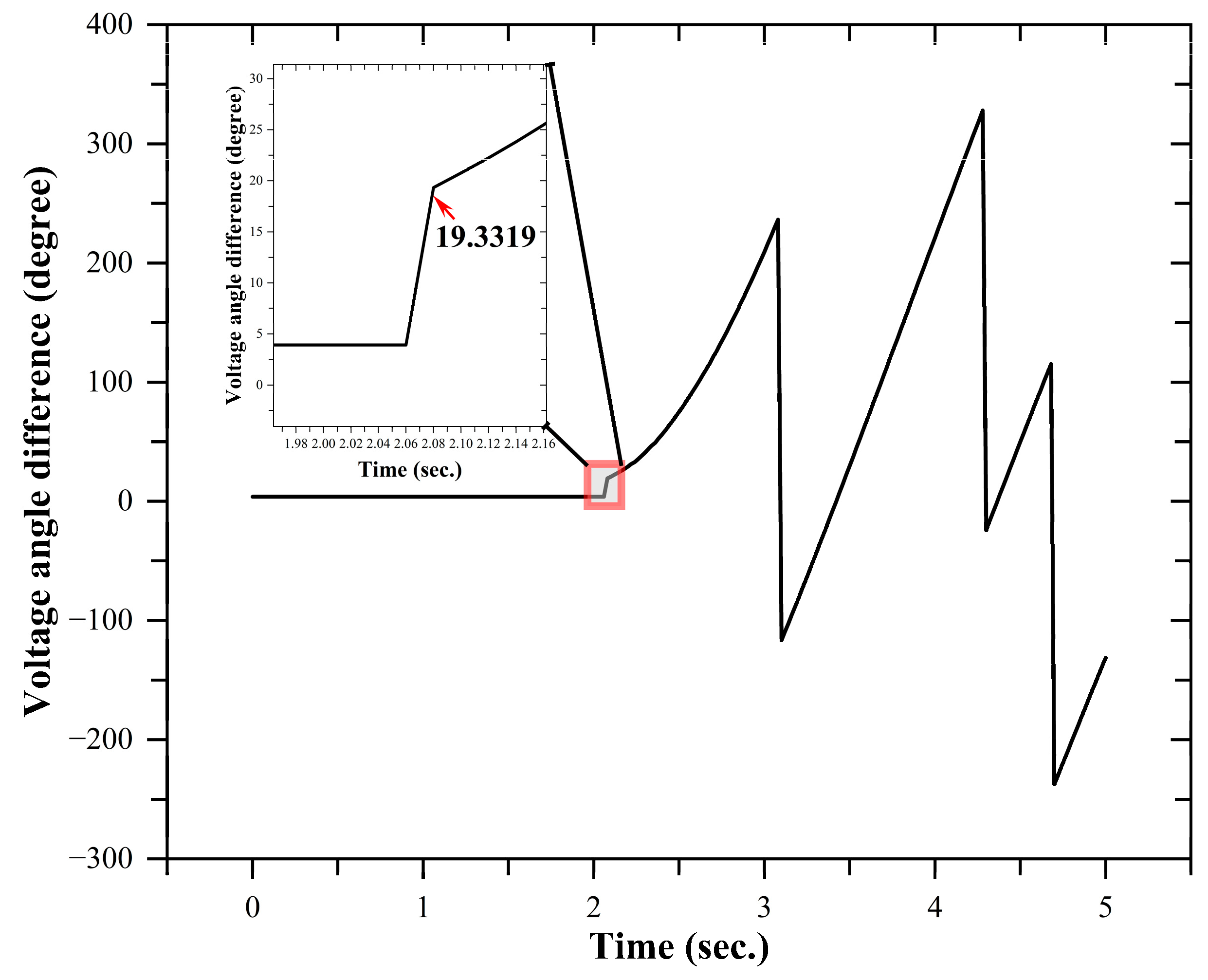
3.2. Over Frequency
3.3. Result Summary
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclatures
| Normal operating voltage angle | |
| DG voltage angle | |
| Utility voltage angle | |
| Fortescue transformation matrix | |
| XUF | Voltage angle of the under frequency island conditions |
| Voltage angle of the over frequency island conditions | |
| XSM | Voltage angle of the system frequency island conditions |
| Current through DG bus | |
| Current through utility bus | |
| Line-line fault current | |
| Line-ground fault current | |
| Line-line-ground fault current | |
| Line-line fault impedance | |
| KP | Line-line fault impedance at point p |
| KQ | Line-line fault impedance at point Q |
| KL | Line-line fault impedance at point L |
| Line-ground fault impedance | |
| Line-line-ground fault impedance | |
| Line-line-line impedance | |
| DG bus impedance | |
| Utility bus impedance | |
| System phase angle | |
| System phase angle in y sequence | |
| System phase angle in b sequence |
References
- Bashir, J.; Jena, P. A Novel Islanding Detection Method in a Distributed Generation Using Change in Phase Angle Difference Between Positive Sequence Current and Voltage. Trans. Indian Natl. Acad. Eng. 2023, 1–11. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, V.V.; Tyagi, B. Islanding detection for reconfigurable microgrid with RES. IET Gener. Transm. Distrib. 2021, 15, 1187–1202. [Google Scholar]
- Seong-Cheol, K.; Ray, P.; Salkuti, S.R. Islanding detection in a distribution network with distributed generators using signal processing techniques. Int. J. Power Electron. Drive Syst. 2020, 11, 2099–2106. [Google Scholar]
- Motter, D.; Vieira, J.C. Improving the islanding detection performance of passive protection by using the undervoltage block function. Electr. Power Syst. Res. 2020, 184, 106293. [Google Scholar]
- Abdelsalam, A.A.; Salem, A.A.; Oda, E.S.; Eldesouky, A.A. Islanding detection of microgrid incorporating inverter based DGs using long short-term memory network. IEEE Access 2020, 8, 106471–106486. [Google Scholar]
- Khichar, S.; Lalwani, M. An analytical survey of the islanding detection techniques of distributed generation systems. Technol. Econ. Smart Grids Sustain. Energy 2018, 3, 1–10. [Google Scholar]
- Manikonda, S.K.G.; Gaonkar, D.N. Islanding detection method based on image classification technique using histogram of oriented gradient features. IET Gener. Transm. Distrib. 2020, 14, 2790–2799. [Google Scholar]
- Zamani, R.; Golshan, M.E.H.; Alhelou, H.H.; Hatziargyriou, N. A novel hybrid islanding detection method using dynamic characteristics of synchronous generator and signal processing technique. Electr. Power Syst. Res. 2019, 175, 10591. [Google Scholar]
- Babakmehr, M.; Dehghanian, F.H.P.; Enslin, J. Artificial intelligence-based cyber-physical events classification for islanding detection in power inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 5282–5293. [Google Scholar]
- Reddy, C.R.; Goud, B.S.; Reddy, B.N.; Pratyusha, M.; Kumar, C.V.; Rekha, R. Review of Islanding Detection Parameters in Smart Grids. In Proceedings of the 2020 8th IEEE International Conference on Smart Grid (icSmartGrid), Oshawa, ON, Canada, 17–19 June 2020; pp. 78–89. [Google Scholar]
- Wang, X.; Dinavahi, W.F.V.; Xu, W. Investigation of positive feedback anti-islanding control for multiple inverter-based distributed generators. IEEE Trans. Power Syst. 2009, 24, 785–795. [Google Scholar]
- Lopes, L.A.; Zhang, Y. Islanding detection assessment of multi-inverter systems with active frequency drifting methods. IEEE Trans. Power Deliv. 2007, 23, 480–486. [Google Scholar]
- Zhou, B.; Cao, C.; Li, C.; Cao, Y.; Chen, C.; Li, Y.; Zeng, L. Hybrid islanding detection method based on decision tree and positive feedback for distributed generations. IET Gener. Transm. Distrib. 2018, 9, 1819–1825. [Google Scholar]
- Khodaparastan, M.; Vahedi, H.; Khazaeli, F.; Oraee, H. A novel hybrid islanding detection method for inverter-based DGs using SFS and ROCOF. IEEE Trans. Power Deliv. 2015, 32, 2162–2170. [Google Scholar]
- Chandak, S.; Mishra, M.; Rout, P.K. Hybrid islanding detection with optimum feature selection and minimum NDZ. Int. Trans. Electr. Energy Syst. 2018, 28, e2602. [Google Scholar]
- Faqhruldin, O.N.; El-Saadany, E.F.; Zeineldin, H.H. A universal islanding detection technique for distributed generation using pattern recognition. IEEE Trans. Smart Grid 2014, 5, 1985–1992. [Google Scholar]
- Gonzalez-Cabrera, N.; Gutierrez-Alcaraz, G. Nodal user’s demand response based on incentive based programs. J. Mod. Power Syst. Clean Energy 2017, 5, 79–90. [Google Scholar]
- Wang, P.; Ding, Y.; Xiao, Y. Technique to evaluate nodal reliability indices and nodal prices of restructured power systems. IEE Proc. Gener. Transm. Distrib. 2005, 152, 390–396. [Google Scholar]
- Arefin, A.A.; Hasan, K.N.M.; Romlie, M.F.; Abdullah, M.F.; Ali, M.L.; Othman, M.L. Determining Islanding Operation Using Micro Grid Phasor Measurement Unit Parameters. Int. J. Emerg. Trends Eng. Res. 2020, 8, 97–101. [Google Scholar]
- Lidula, N.W.A.; Rajapakse, A.D. A pattern-recognition approach for detecting power islands using transient signals—Part II: Performance evaluation. IEEE Trans. Power Deliv. 2012, 27, 1071–1080. [Google Scholar]
- Galvan, F.; Wells, C.H. Detecting and managing the electrical island created in the aftermath of Hurricane Gustav using Phasor Measurement Unit (PMUs). In Proceedings of the IEEE PES T & D, New Orleans, LA, USA, 19–22 April 2010; pp. 1–5. [Google Scholar]
- Arefin, A.A.; Baba, M.; Singh, N.S.S.; Nor, N.B.M.; Sheikh, M.A.; Kanan, R.; Abro, G.E.M.; Mathur, N. Review of the Techniques of the Data Analytics and Islanding Detection of Distribution Systems Using Phasor Measurement Unit Data. Electronics 2022, 11, 2967. [Google Scholar]
- Ravikumar, K.G.; Upreti, A.; Nagarajan, A. State-of-the-Art Islanding Detection and Decoupling Systems for Utility and Industrial Power Systems. In Proceedings of the 69th Annual Georgia Tech Protective Relaying Conference, Atlanta, GA, USA, 29 April–1 May 2015. [Google Scholar]
- Arefin, A.A.; Hasan, K.N.B.M.; Othman, M.L.; Romlie, M.F.; Saad, N.; Nor, N.B.M.; Abdullah, M.F. A Novel Island Detection Threshold Setting Using Phasor Measurement Unit Voltage Angle in a Distribution Network. Energies 2021, 14, 4877. [Google Scholar]
- Liu, X.A.; Laverty, D.; Best, R. Islanding detection based on probabilistic PCA with missing values in PMU data. In Proceedings of the IEEE PES General Meeting Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar]
- Liu, X.; Kennedy, J.M.; Laverty, D.M.; Morrow, D.J.; McLoone, S. Wide-area phase-angle measurements for islanding detection—An adaptive nonlinear approach. IEEE Trans. Power Deliv. 2017, 31, 1901–1911. [Google Scholar]
- Kumar, D.; Bhowmik, P.S. Wide area islanding detection using phasor measurement unit. In Proceedings of the IEEE 11th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 5–6 January 2017; pp. 49–54. [Google Scholar]
- Chen, H.; Martin, K.; Bhargava, B.; Budhraja, V.; Balance, J. On-line islanding detection application in the ActualTime dynamics monitoring system. In Proceedings of the IEEE PES T & D Conference and Exposition, Chicago, IL, USA, 14–17 April 2014; pp. 1–4. [Google Scholar]
- Ebrahim, M.A.; Wadie, F.; Abd-Allah, M.A. An Algorithm for Detection of Fault, Islanding, and Power Swings in DG-Equipped Radial Distribution Networks. IEEE Systtem J. 2019, 14, 3893–3903. [Google Scholar]
- Ebrahim, M.A.; Wadie, F.; Abd-Allah, M.A. Integrated fault detection algorithm for transmission, distribution, and microgrid networks. IET Energy Syst. Integr. 2019, 1, 104–113. [Google Scholar]
- Lin, Z.; Xia, T.; Ye, Y.; Zhang, Y.; Chen, L.; Liu Wen, F. Application of wide area measurement systems to islanding detection of bulk power systems. IEEE Trans. Power Syst. 2013, 28, 2006–2015. [Google Scholar]
- Narayanan, K.; Siddiqui, S.A.; Fozdar, M. Hybrid islanding detection method and priority-based load shedding for distribution networks in the presence of DG units. IET Gener. Transm. Distrib. 2017, 11, 586–595. [Google Scholar]
- Admasie, S.; Bukhari, S.B.A.; Haider, R.; Gush, T.; Kim, C.-H. A passive islanding detection scheme using variational mode decomposition based mode singular entropy for integrated microgrids. Elect. Power Syst. Res. 2019, 177, 105983. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs. | Goals | Measurement Components | Contributions | Limitations |
|---|---|---|---|---|
| [25] | To detect the island in a match frequency condition using slip frequency and acceleration. | Frequency | The proposed algorithm requires 500 ms for the detection after the island inception in the system. It can detect frequency islanding conditions or match frequency islanding conditions. | Under frequency and over frequency islanding conditions are absent. Therefore, it is hard to know how this algorithm may respond to these frequent islanding conditions (under and over frequency). |
| [25,26] | To detect the islanding event using probabilistic principal component analysis. | Voltage angle | Achieves faster detection time without having false triggered and ensures higher reliability by accommodating the missing PMU’s data. | During the over frequency detection, the technique failed. Therefore, when the DG capacity is higher than the connected load, this proposed algorithm may collapse and can create a hazardous situation. |
| [27,28] | To detect the islanding event using the voltage angle and current angle. | Voltage angle | The number of false triggers is less. | The performance of the under frequency was absent. Therefore, there is a high chance that this algorithm may collapse when there is a significant decline in changes in the connected load. |
| [29,30] | To detect the islanding event using power magnitude. | Voltage and current magnitude | The detection time improved without triggering any false alarms. | Since this method is based on local detection, over frequency islanding conditions cannot be detected by their proposed scheme. |
| [31] | To detect the island event using voltage and current angle. | Voltage and current angle | The algorithm can detect the island in a shorter amount of time. | Unable to distinguish between different island scenarios during under frequency and over frequency island conditions, which indicates that this proposed algorithm is appropriate for certain islanding scenarios. |
| [32] | To propose a scheme based on phasor and frequency data from a PMU under frequency islanding. | Phasor data and frequency | The proposed scheme reduces the number of false alarms during the island event. | The real-time islanding scenarios of the distribution system are not considered to evaluate the approach. On the other hand, a repeating trigger means false tripping which decreases the performance of the algorithm. |
| [33] | To detect the island during under frequency conditions using slip frequency and acceleration. | Frequency | Islanding can be detected by the algorithm even when power exchange is minimal. | The detection time scale is not present and the performance in the different island scenarios are absent. However, without a time scale, it is unclear to know the feasibility of the algorithm in a real time since a faster islanding detection algorithm is required in terms of time. |
| Bus | Parameters | Values |
|---|---|---|
| DG Bus (GTG-G-1) | MW setpoint | 25.893 MW |
| Maximum MW output | 45.20 MW | |
| Power factor | 0.8980 | |
| MVAR output | 12.054 MVAR | |
| Minimum MVARs | 12.054 MVAR | |
| Maximum MVARs | 23.00 MVAR | |
| Generator MVA Base | 56.50 MVA | |
| Fuel type | Natural gas | |
| Internal sequence impedance | Positive: resistance: 0.01, reactance: 0.20 Negative: resistance: 0.01, reactance: 0.20 Zero: resistance: 0.01, reactance: 0.20 | |
| Machine models | GENSAL | |
| Exciters | Active-DC2C | |
| Governors | Active-GGOV3 | |
| KTIH Bus | Load | Under frequency: 16MW (Scenario 1~4) Over frequency: 58 MW (Scenario 1~4) |
| Conditions | Scenarios | Threshold Time (ms) | Threshold Value (Deg) |
|---|---|---|---|
| Under frequency | 1 | 60 | 0.5348 |
| 2 | 40 | 0.5248 | |
| 3 | 60 | 0.4363 | |
| 4 | 40 | 0.6622 | |
| Over frequency | 1 | 80 | 19.3863 |
| 2 | 60 | 19.2712 | |
| 3 | 80 | 19.3319 | |
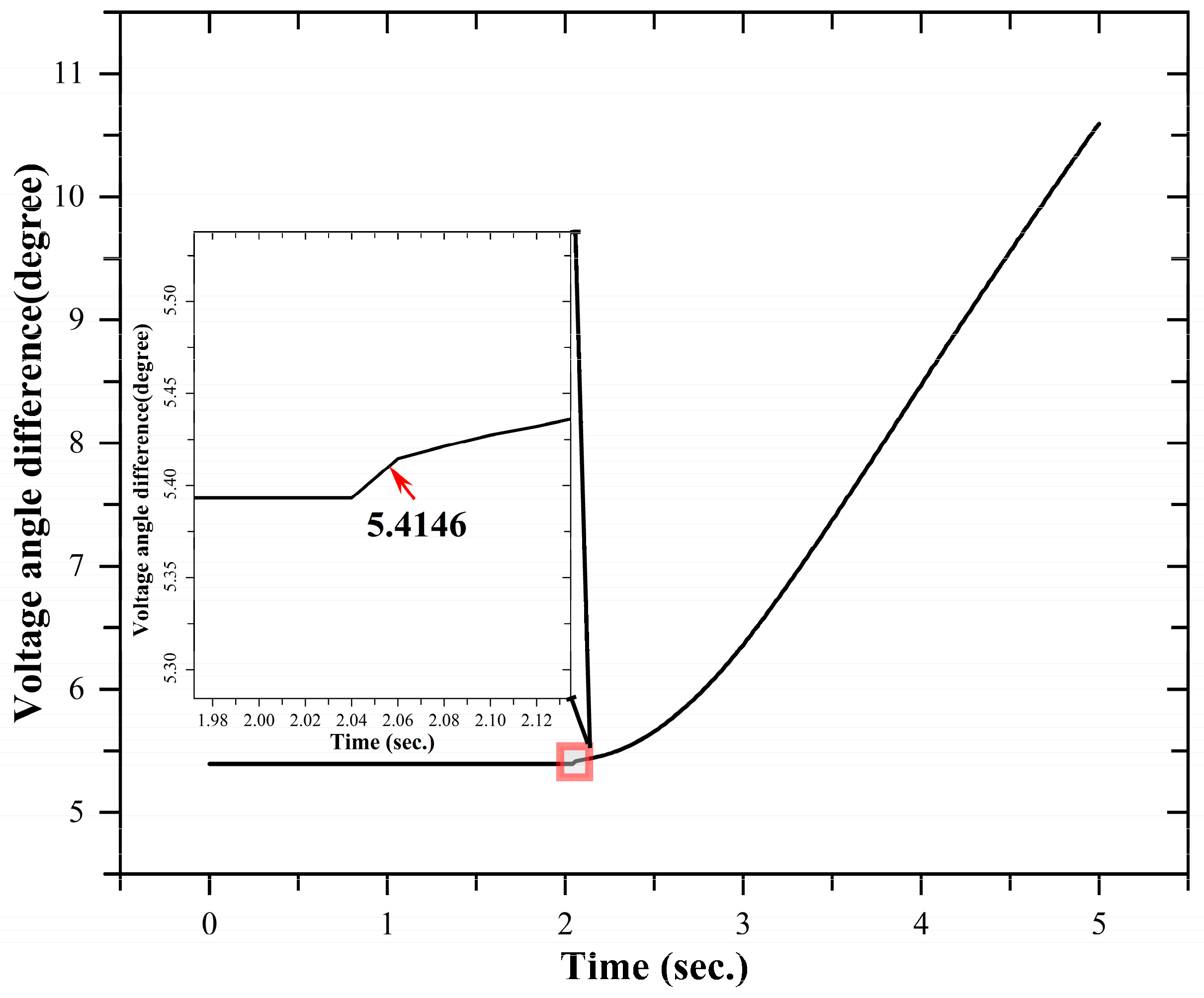
| 4 | 60 | 5.4146 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arefin, A.A.; Rahman, M.S.; Hossain Lipu, M.S.; Sarker, M.R.; Sawaran Singh, N.S.; Meraj, S.T. Determining Unintentional Island Threshold to Enhance the Reliability in an Electrical Distribution Grid. Mathematics 2023, 11, 886. https://doi.org/10.3390/math11040886
Arefin AA, Rahman MS, Hossain Lipu MS, Sarker MR, Sawaran Singh NS, Meraj ST. Determining Unintentional Island Threshold to Enhance the Reliability in an Electrical Distribution Grid. Mathematics. 2023; 11(4):886. https://doi.org/10.3390/math11040886
Chicago/Turabian StyleArefin, Ahmed Amirul, Md. Siddikur Rahman, Molla Shahadat Hossain Lipu, Mahidur R. Sarker, Narinderjit Singh Sawaran Singh, and Sheikh Tanzim Meraj. 2023. "Determining Unintentional Island Threshold to Enhance the Reliability in an Electrical Distribution Grid" Mathematics 11, no. 4: 886. https://doi.org/10.3390/math11040886
APA StyleArefin, A. A., Rahman, M. S., Hossain Lipu, M. S., Sarker, M. R., Sawaran Singh, N. S., & Meraj, S. T. (2023). Determining Unintentional Island Threshold to Enhance the Reliability in an Electrical Distribution Grid. Mathematics, 11(4), 886. https://doi.org/10.3390/math11040886