
A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot


Abstract
1. Introduction
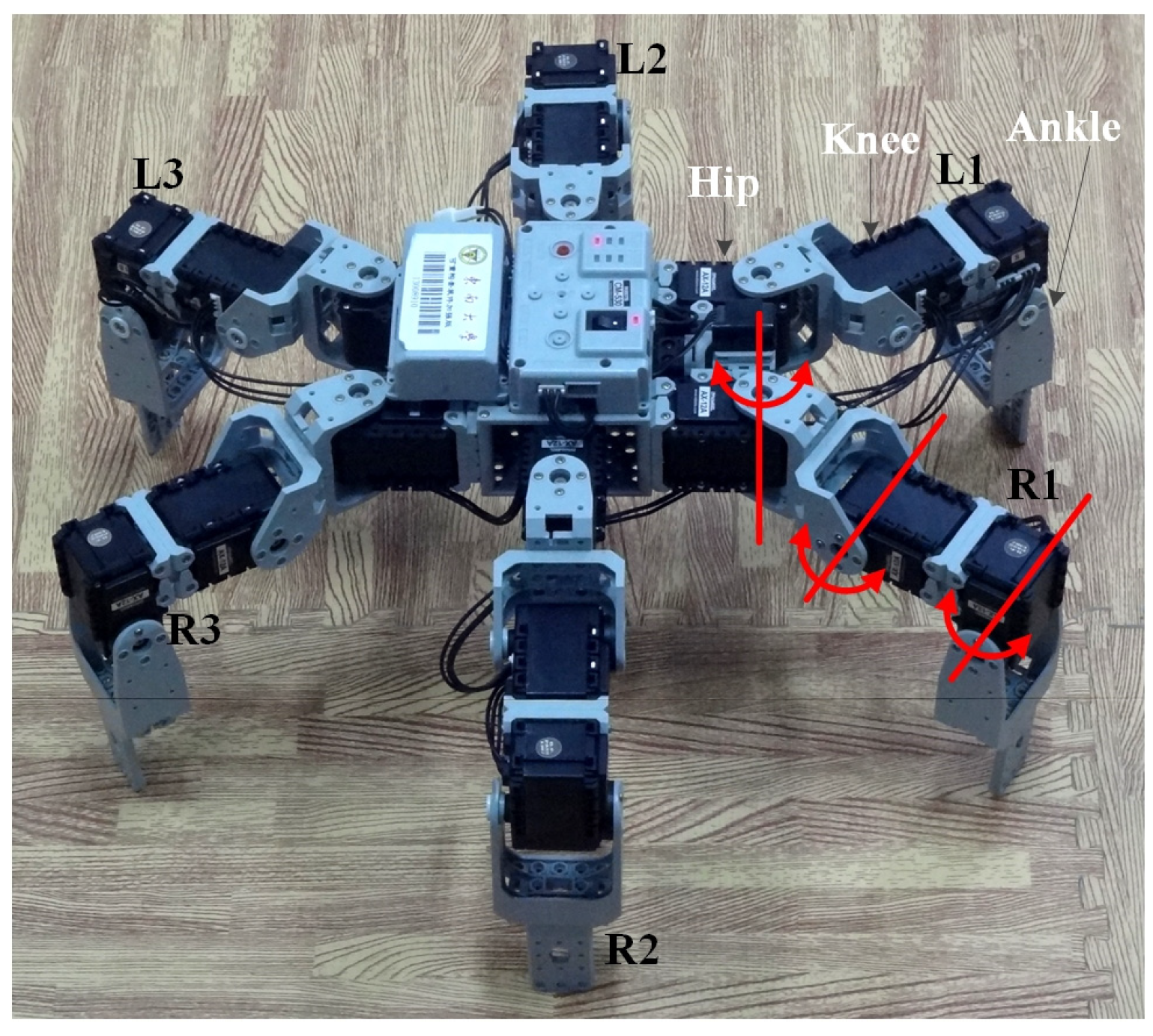
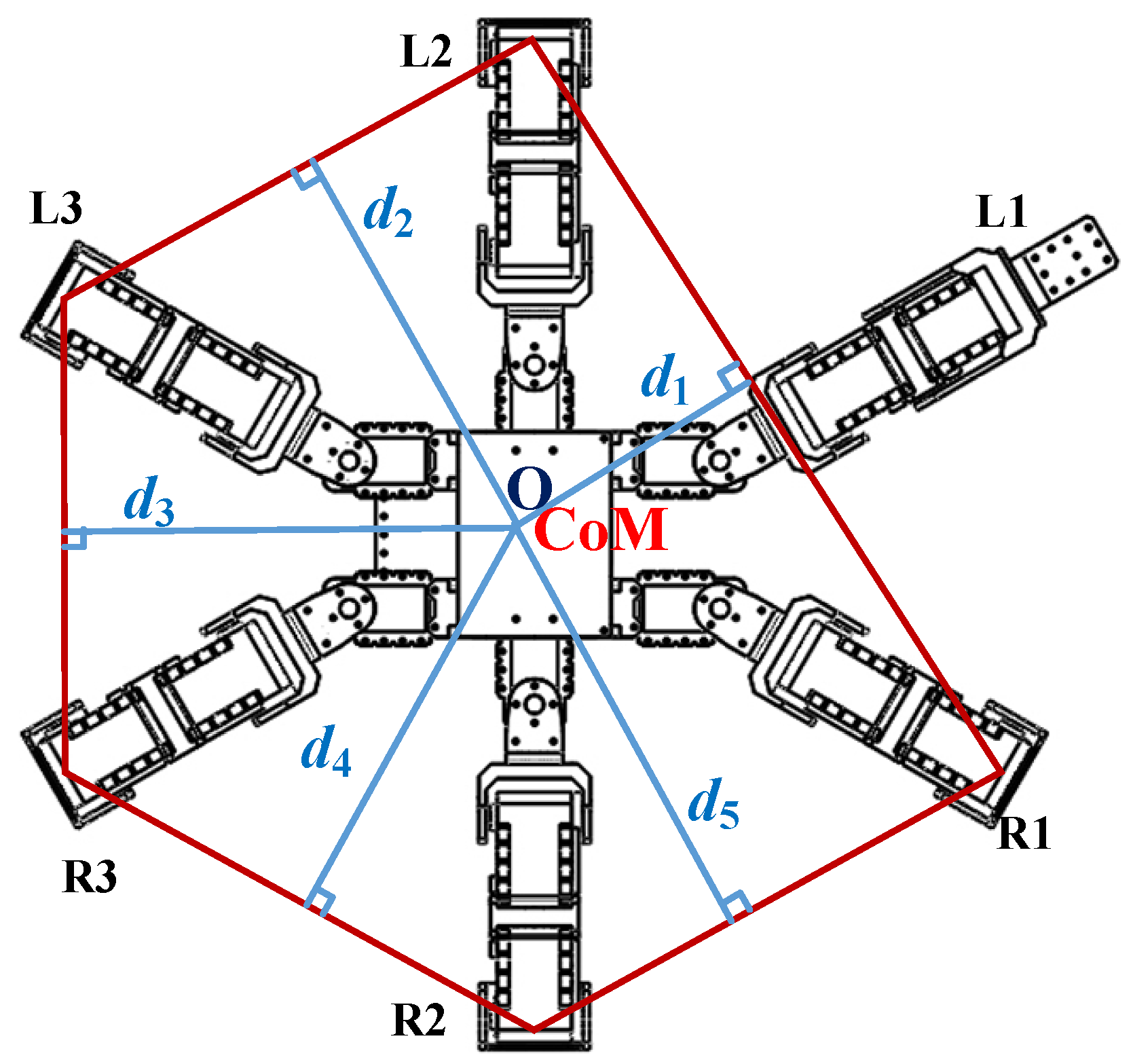
2. Overview of the Hexapod Robot Platform
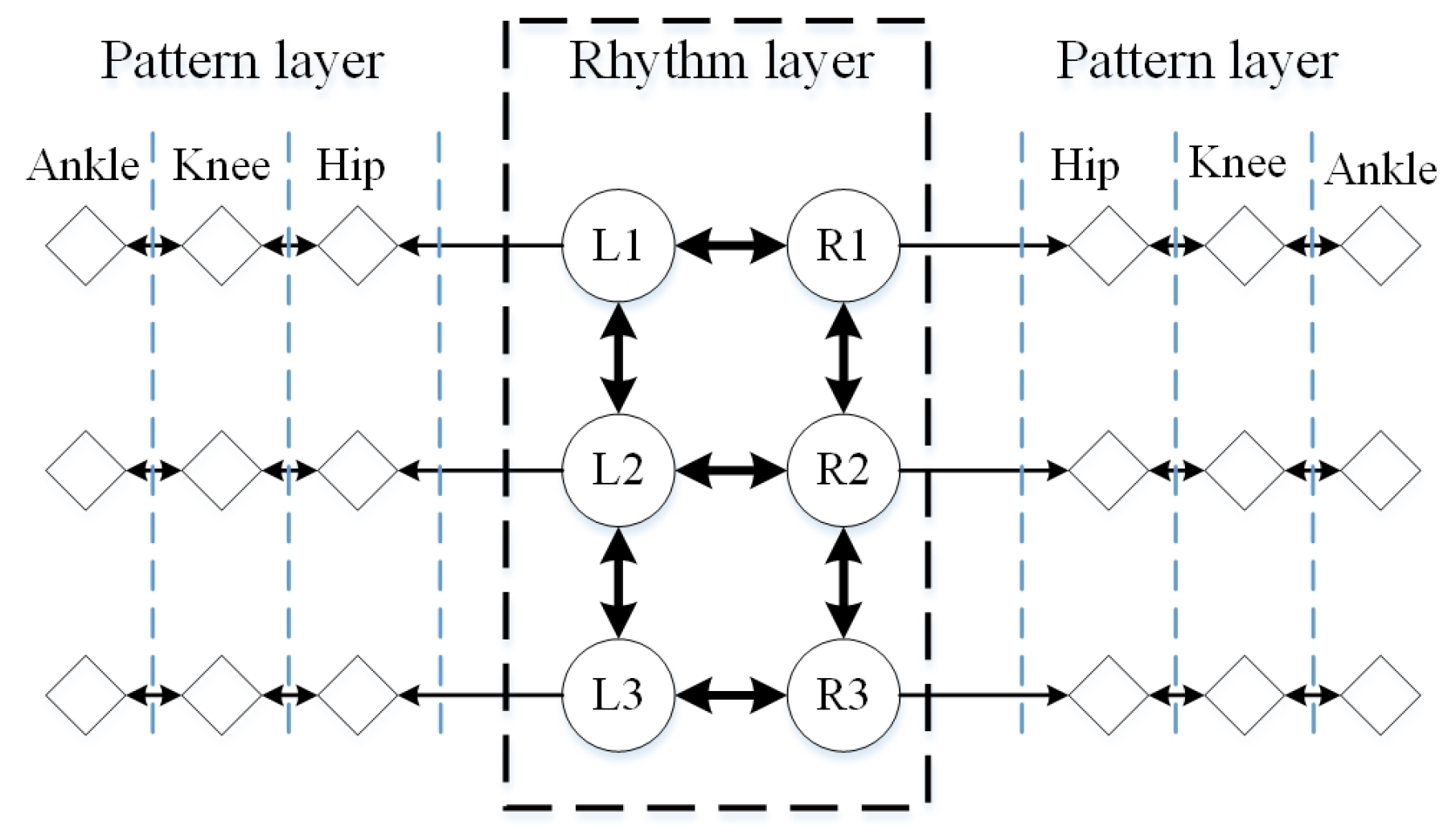
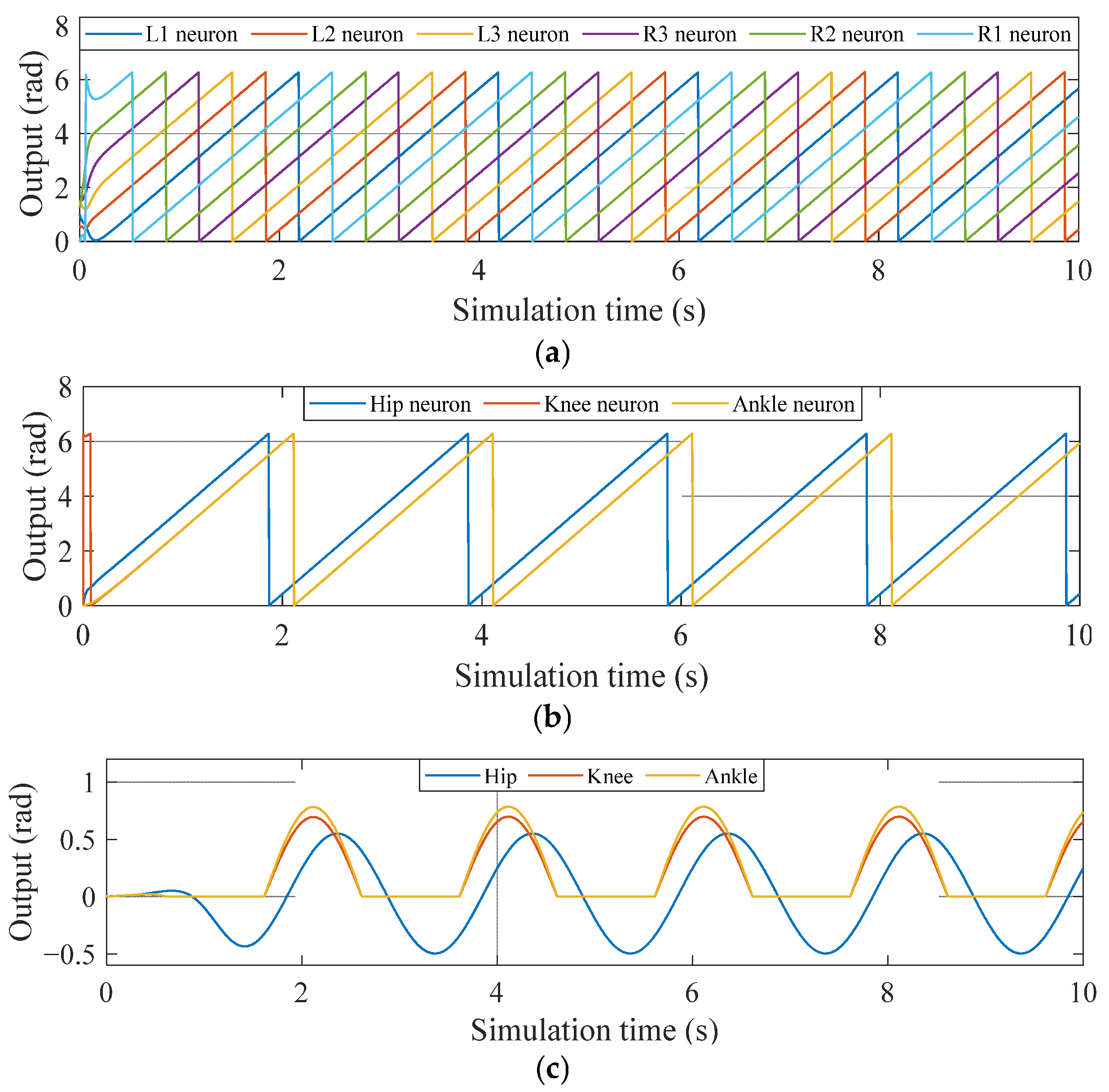
3. Motion Controller Based on the Double-Layered CPG
4. Gait Planning of the Hexapod Robot
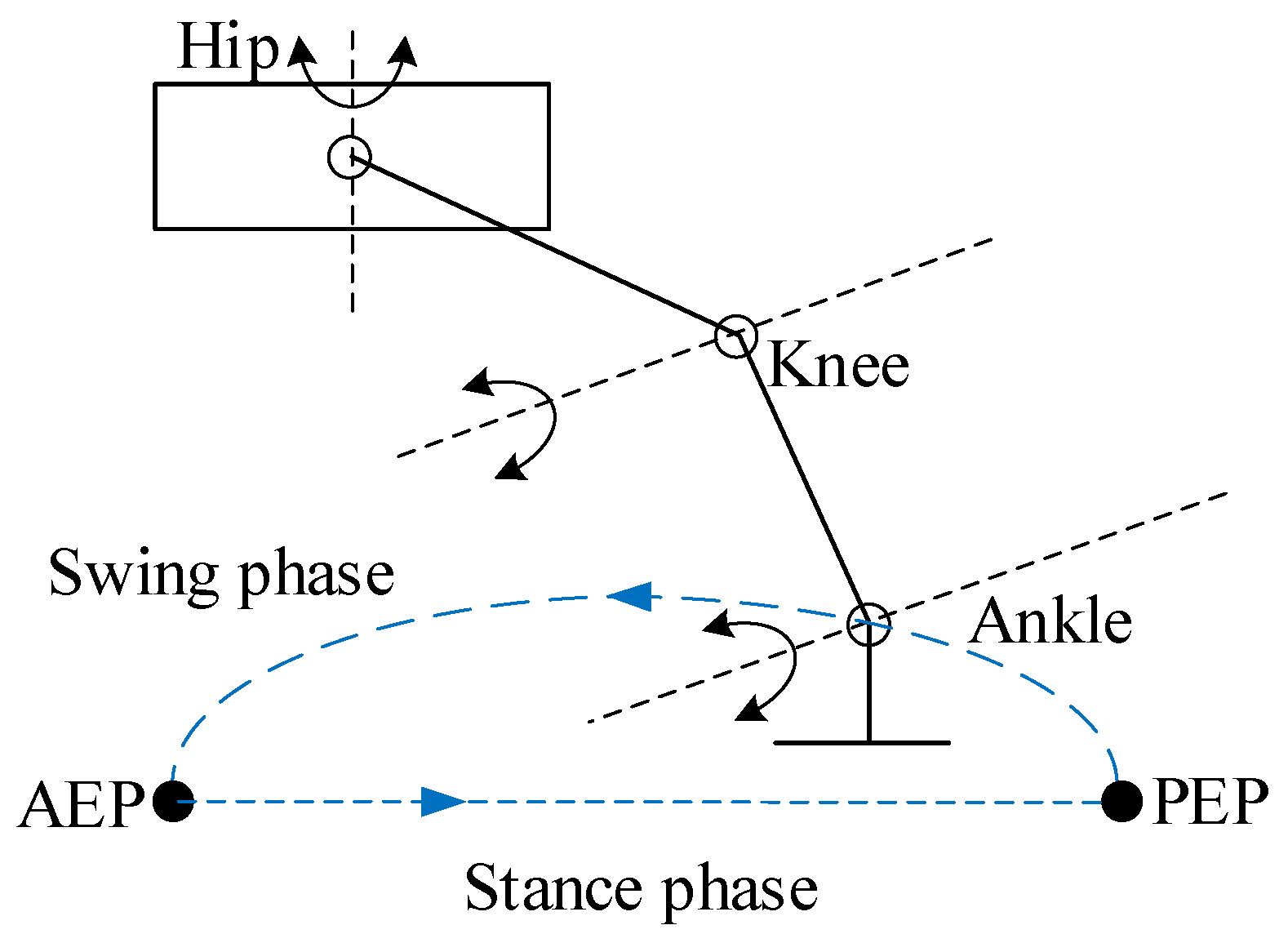
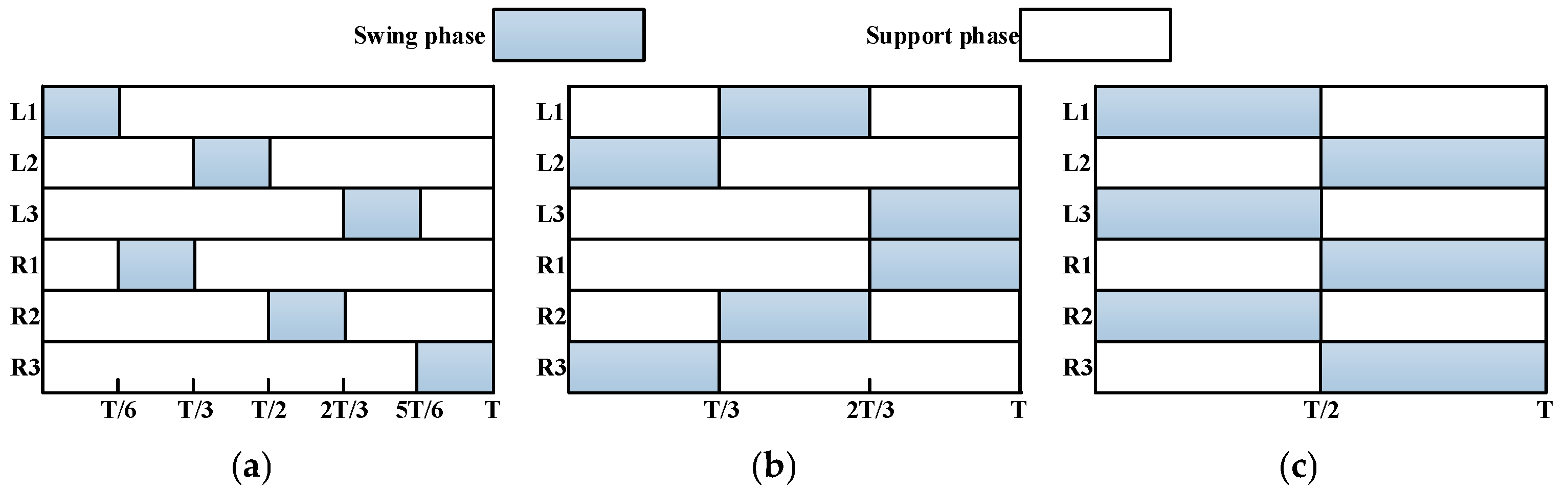
4.1. Phase Analysis of Each Gait
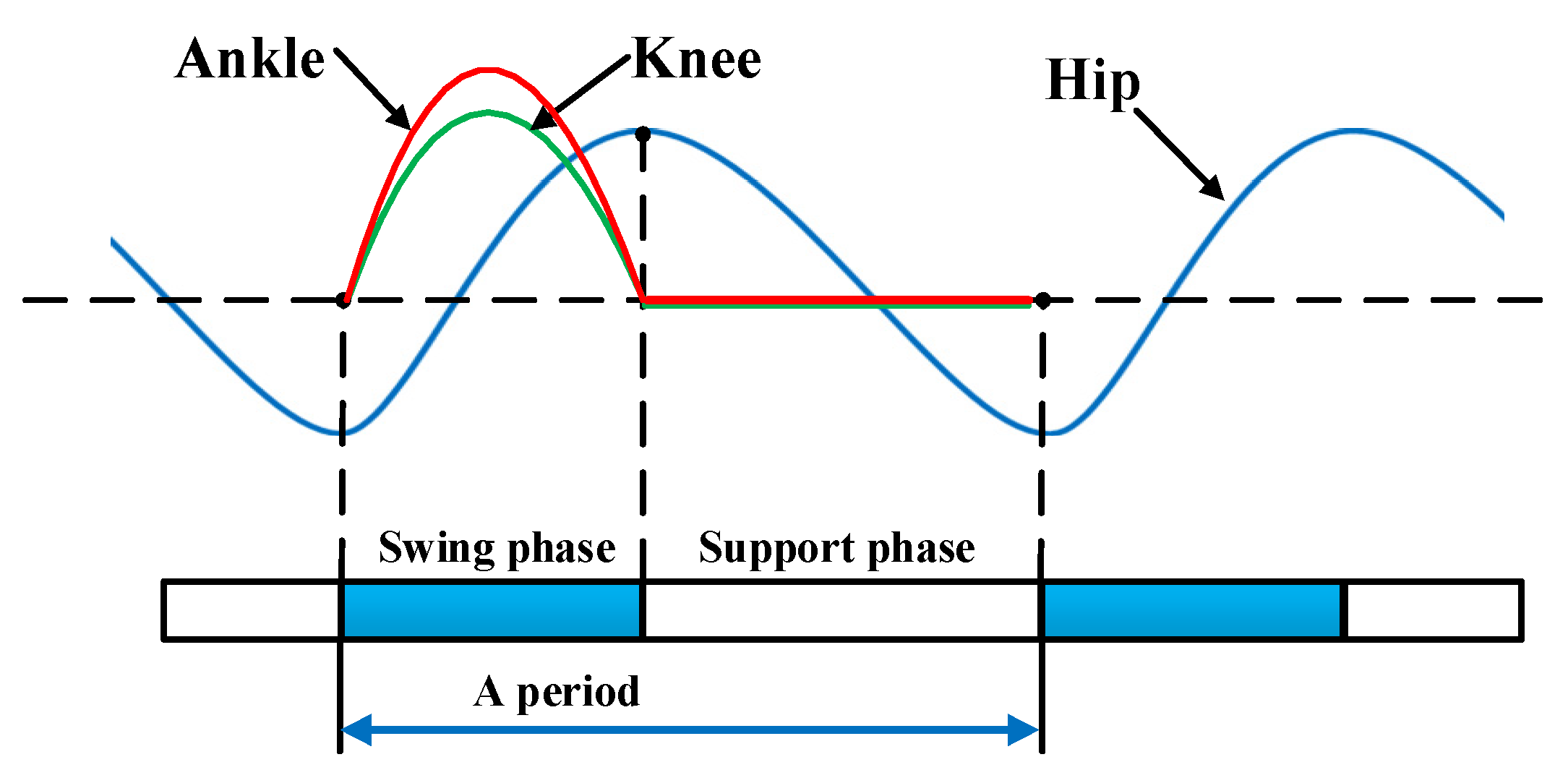
4.2. Joint Trajectory of Each Gait
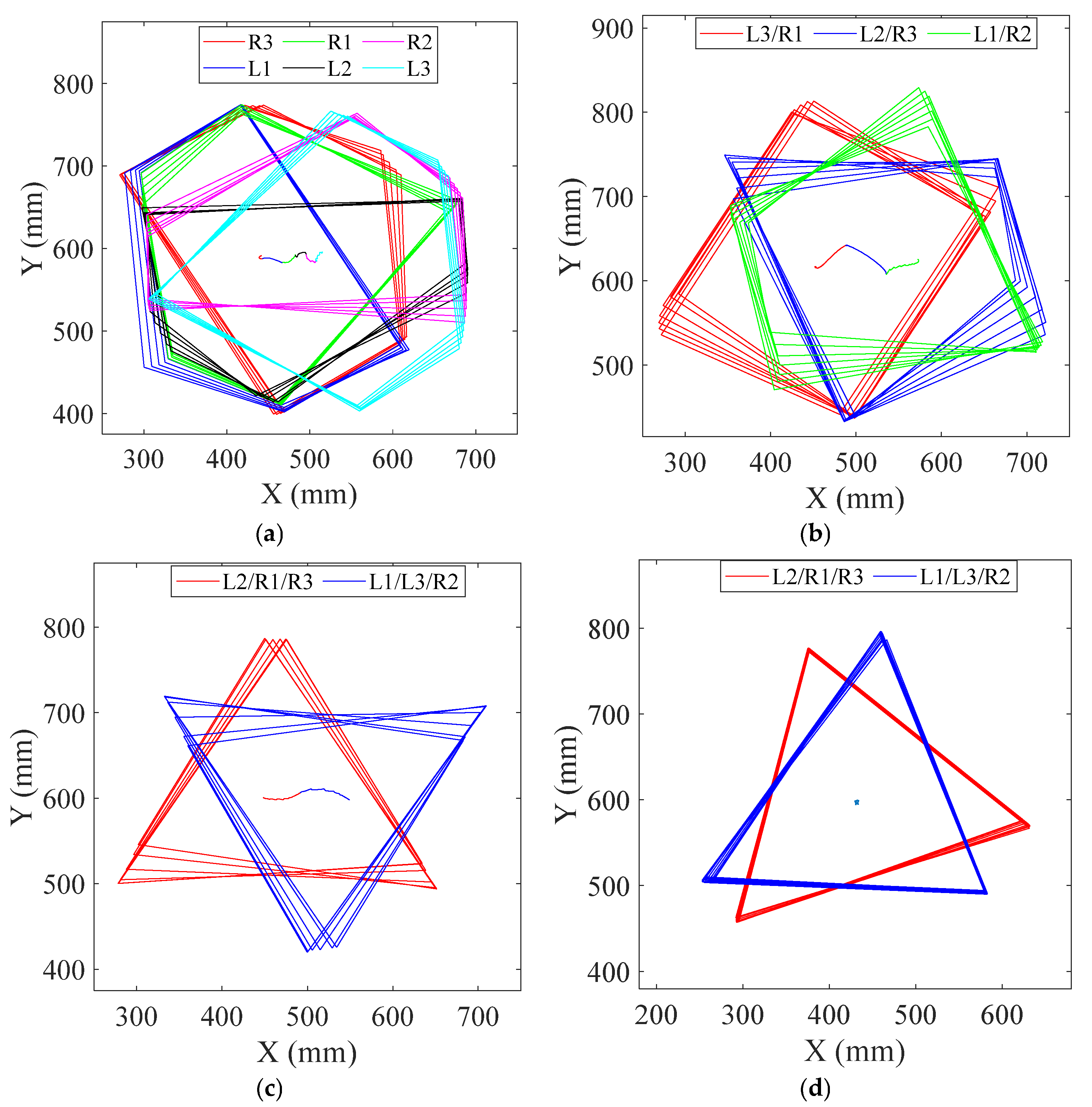
5. Locomotion Simulation of the Hexapod Robot
5.1. Simulation of the Wave Gait
5.2. Simulation of the Tetrapod Gait
5.3. Simulation of the Tripod Gait
5.4. Simulation of the Self-Turning Gait
5.5. The Stability Analysis of Each Gait
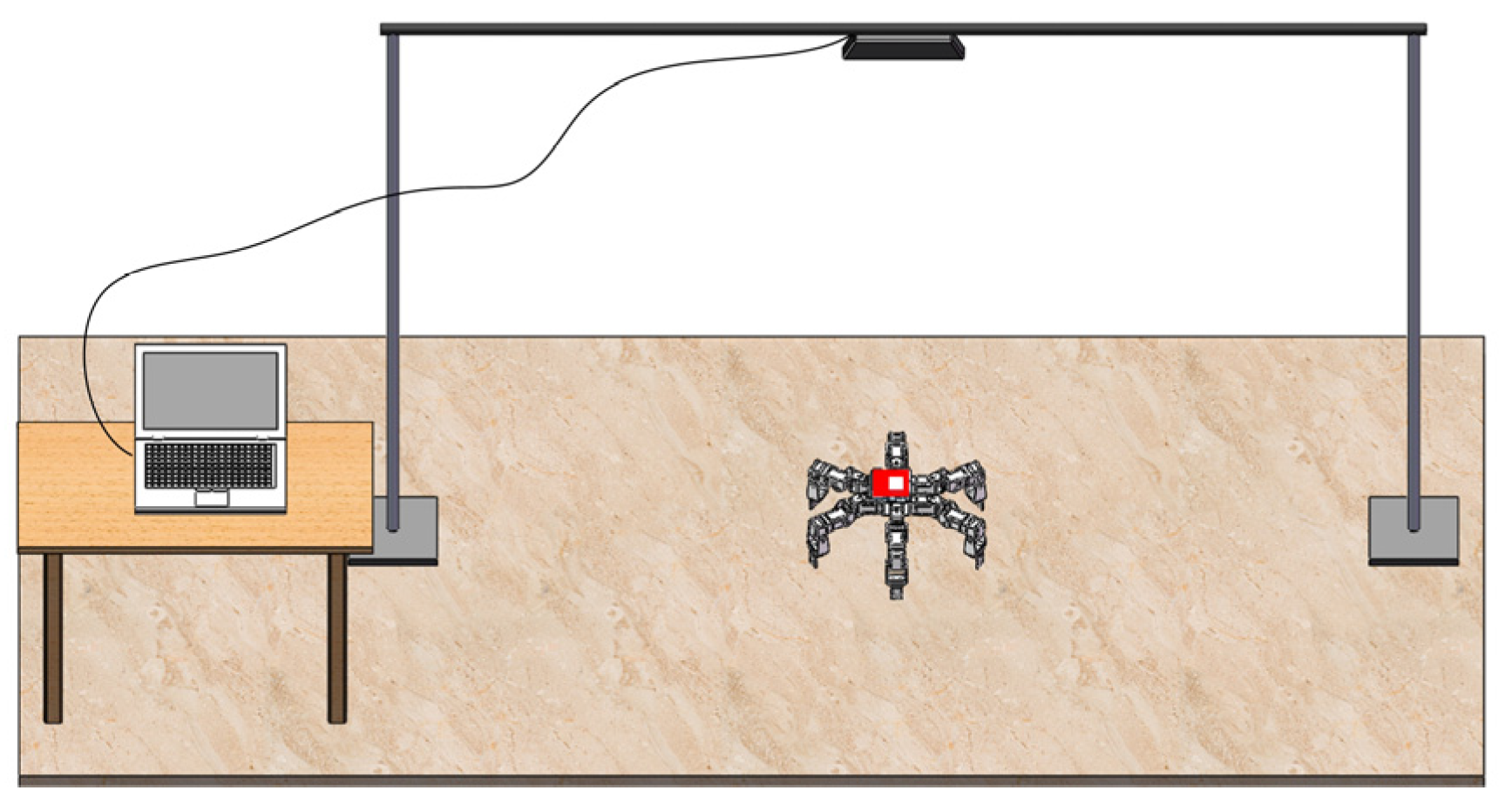
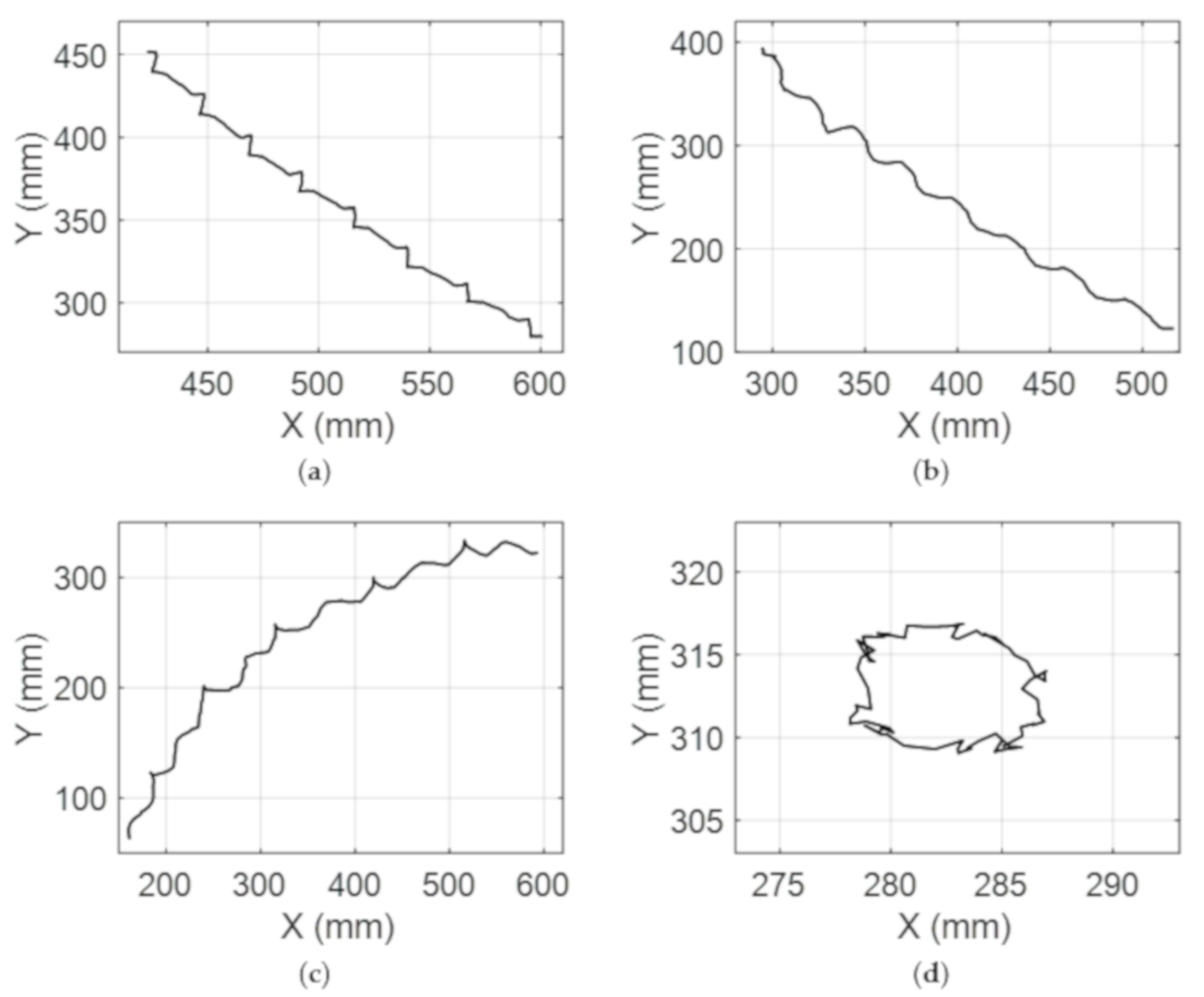
6. Experimental Results of the Hexapod Robot
7. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Batres-Mendoza, P.; Guerra-Hernandez, E.I.; Espinal, A.; Pérez-Careta, E.; Rostro-Gonzalez, H. Biologically-inspired legged robot locomotion controlled with a BCI by means of cognitive monitoring. IEEE Access 2021, 9, 35766–35777. [Google Scholar] [CrossRef]
- Shinya, A.; Poramate, M.; Yuichi, A.; Fumitoshi, M.; Florentin, W. Adaptive control strategies for interlimb coordination in legged robots: A review. Front. Neurorobot. 2017, 11, 00039. [Google Scholar]
- Muscolo, G.G.; Ceccarelli, M. Editorial: Mechanics of legged robots: From bio-inspiration to novel legged machines. Front. Mech. Eng. 2021, 7, 667164. [Google Scholar] [CrossRef]
- Sun, Q.; Gao, F.; Chen, X. Towards dynamic alternating tripod trotting of a pony-sized hexapod robot for disaster rescuing based on multi-modal impedance control. Robotica 2018, 36, 1048–1076. [Google Scholar] [CrossRef]
- Arena, E.; Arena, P.; Patané, L. Efficient hexapodal locomotion control based on flow-invariant subspaces. IFAC Proc. Vol. 2011, 44, 13758–13763. [Google Scholar] [CrossRef]
- Dürr, V.; Arena, P.; Cruse, H.; Dallmann, C.; Drimus, A.; Hoinville, T.; Krause, T.; Mátéfi-Tempfli, S.; Paskarbeit, J.; Patanè, L.; et al. Integrative biomimetics of autonomous hexapedal locomotion. Front. Neurorobot. 2019, 13, 00088. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, Y.; Zhang, F.; Zhou, S. Position- posture control of multilegged walking robot based on kinematic correction. J. Robot. 2020, 4, 8896396. [Google Scholar] [CrossRef]
- Irawan, A.; Nonami, K. Compliant walking control for hydraulic driven hexapod robot on rough terrain. J. Robot. Mechatron. 2011, 23, 149–162. [Google Scholar] [CrossRef]
- Chen, T.; Li, Y.; Rong, X.; Zhang, G.; Chai, H.; Bi, J.; Wang, Q. Design and control of a novel leg-arm multiplexing mobile operational hexapod robot. IEEE Robot. Autom. Lett. 2021, 7, 382–389. [Google Scholar] [CrossRef]
- Ruan, W.; Dong, Q.; Zhang, X.; Li, Z. Friction compensation control of electromechanical actuator based on neural network adaptive sliding mode. Sensors 2021, 21, 1508. [Google Scholar] [CrossRef]
- Salehi Kolahi, M.R.; Gharib, M.R.; Heydari, A. Design of a non-singular fast terminal sliding mode control for second-order nonlinear systems with compound disturbance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 7343–7352. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Adaptive robust position control of electro-hydraulic servo systems with large uncertainties and disturbances. Appl. Sci. 2022, 12, 794. [Google Scholar] [CrossRef]
- Gharib, M.R.; Koochi, A.; Ghorbani, M. Path tracking control of electromechanical micro-positioner by considering control effort of the system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 984–991. [Google Scholar] [CrossRef]
- MacKay-Lyons, M. Central pattern generation of locomotion: A review of the evidence. Phys. Ther. 2002, 82, 69–83. [Google Scholar] [CrossRef]
- Yu, J.; Tan, M.; Chen, J.; Zhang, J. A survey on CPG-inspired control models and system implementation. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 441–456. [Google Scholar] [CrossRef]
- Barron-Zambrano, J.H.; Torres-Huitzil, C.; Girau, B. Perception-driven adaptive CPG-based locomotion for hexapod robots. Neurocomputing 2015, 170, 63–78. [Google Scholar] [CrossRef]
- Kahouli, O.; Jmal, A.; Naifar, O.; Nagy, A.M.; Ben Makhlouf, A. New result for the analysis of Katugampola fractional-order systems-application to identification problems. Mathematics 2022, 10, 1814. [Google Scholar] [CrossRef]
- Ben Makhlouf, A.; Nagy, A.M. Finite-time stability of linear Caputo-Katugampola fractional-order time delay systems. Asian J. Control 2020, 22, 297–306. [Google Scholar] [CrossRef]
- Jmal, A.; Ben Makhlouf, A.; Nagy, A.M.; Naifar, O. Finite-time stability for Caputo–Katugampola fractional-order time-delayed neural networks. Neural Process. Lett. 2019, 50, 607–621. [Google Scholar] [CrossRef]
- Pinto, C.; Tenreiro Machado, J.A. Fractional central pattern generators for bipedal locomotion. Nonlinear Dyn. 2010, 62, 27–37. [Google Scholar] [CrossRef]
- Lu, Q. Dynamics and coupling of fractional-order models of the motor cortex and central pattern generators. J. Neural Eng. 2020, 17, 036021. [Google Scholar] [CrossRef] [PubMed]
- Owaki, D.; Goda, M.; Miyazawa, S.; Ishiguro, A. A minimal model describing hexapedal interlimb coordination: The tegotae-based approach. Front. Neurorobot. 2017, 11, 00029. [Google Scholar] [CrossRef] [PubMed]
- Zamboni, R.; Owaki, D.; Hayashibe, M. Adaptive and energy-efficient optimal control in CPGs through tegotae-based feedback. Front. Robot. AI 2021, 8, 632804. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Liu, C.; Zhang, J.; Chen, Q. Advances in bio-inspired robot walking control. Sci. China Ser. F Inf. Sci. 2009, 39, 1080–1094. [Google Scholar]
- Liu, G.; Habib, M.K.; Watanabe, K.; Izumi, K.K. Central pattern generators based on Matsuoka oscillators for the locomotion of biped robots. Artif. Life Robot. 2008, 12, 264–269. [Google Scholar] [CrossRef]
- Kimura, H.; Fukuoka, Y.; Cohen, A.H. Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts. Int. J. Robot. Res. 2007, 26, 475–490. [Google Scholar] [CrossRef]
- Qiao, G.; Zhang, Y.; Wen, X.; Wei, Z.; Cui, J. Triple-layered central pattern generator-based controller for 3D locomotion control of snake-like robots. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417738101. [Google Scholar] [CrossRef]
- Chang, Q.; Mei, F. A bioinspired gait transition model for a hexapod robot. J. Robot. 2018, 12, 2913636. [Google Scholar] [CrossRef]
- Dégallier, S.; Santos, C.P.; Righetti, L.; Ijspeert, A. Movement generation using dynamical systems: A humanoid robot performing a drumming task. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006. [Google Scholar]
- Heliot, R.; Espiau, B. Multisensor input for CPG-based sensory-motor coordination. IEEE Trans. Robot. 2008, 24, 191–195. [Google Scholar] [CrossRef]
- Gay, S.; Santos-Victor, J.; Ijspeert, A. Learning robot gait stability using neural networks as sensory feedback function for central pattern generators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar]
- Arena, E.; Arena, P.; Patané, L. CPG-based locomotion generation in a Drosophila inspired legged robot. In Proceedings of the IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012. [Google Scholar]
- Arena, P.; Patanè, L.; Taffara, S. Energy efficiency of a quadruped robot with neuro-inspired control in complex environments. Energies 2021, 14, 433. [Google Scholar] [CrossRef]
- Thor, M.; Kulvicius, T.; Manoonpong, P. Generic neural locomotion control framework for legged robots. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4013–4025. [Google Scholar] [CrossRef]
- Xu, Y.; Gao, F.; Pan, Y.; Xun, C. Method for six-legged robot stepping on obstacles by indirect force estimation. Chin. J. Mech. Eng. 2016, 29, 669–679. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, K.; Yang, X.; Cui, X. The gait planning of hexapod robot based on CPG with feedback. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420930503. [Google Scholar] [CrossRef]
- Wang, R.; Powell, N. Hybrid gait planning of a hexapod robot. Mod. Electron. Technol. 2020, 2, 11–16. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Crespi, A.; Ryczko, D.; Cabelguen, J.M. From swimming to walking with a salamander robot driven by a spinal cord model. Science 2007, 315, 1416–1420. [Google Scholar] [CrossRef]
- Rostro-Gonzalez, H.; Cerna-Garcia, P.; Trejo- Caballero, G.; Garcia-Capulin, C.; Ibarra-Manzano, M.A.; Avina-Cervantes, J.G.; Torres-Huitzil, C. A CPG system based on spiking neurons for hexapod robot locomotion. Neurocomputing 2015, 170, 47–54. [Google Scholar] [CrossRef]
- Bal, C. Neural coupled central pattern generator based smooth gait transition of a biomimetic hexapod robot. Neurocomputing 2020, 420, 210–226. [Google Scholar] [CrossRef]
- Ouyang, W.; Chi, H.; Pang, J.; Liang, W.; Ren, Q. Adaptive locomotion control of a hexapod robot via bio-inspired learning. Front. Neurorobot. 2021, 15, 627157. [Google Scholar] [CrossRef]
- Minati, L.; Frasca, M.; Yoshimura, N.; Koike, Y. Versatile locomotion control of a hexapod robot using a hierarchical network of nonlinear oscillator circuits. IEEE Access 2018, 6, 8042–8065. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prototype | Leg Joint | CPG Model | Layered Configuration | Number of Oscillators | Coupling Relationship | Gait Types | Implementation |
|---|---|---|---|---|---|---|---|
| Proposed hexapod | 3 | Kuramoto oscillator | Two layers | 24 | Mesh/Chain type | Wave gait Tetrapod gait Tripod gait Self-turing gait | Software Simple |
| Hexapod [16] | 3 | Van der Pol oscillator | Single layer | 6 | Mesh type | Walk (Speed control) | Software Simple |
| Hexapod [17] | 2 | Tegotae-based control | Single layer | 6 | Mesh type | Wave gait Tetrapod gait Tripod gait | Software Simple |
| Hexapod [39] | 3 | Spiking neuron model | Single layer | 12 | Mesh type | Walk (Speed control) | Hardware Complex |
| Hexapod [40] | 3 | Hopfield oscillator | Single layer | 6 | Mesh type | Wave gait Tetrapod gait Tripod gait | Software Medium |
| Hexapod [41] | 3 | Hopfield oscillator | Two layers | 18 | Mesh type | Tripod gait Tetrapod gait | Software Medium |
| Hexapod [42] | 3 | Non-linear oscillator | Two layers | 18 | Mesh type | Wave gait Tripod gait Tetrapod gait | Hardware Complex |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Qiao, G.; Wan, Q.; Tian, L.; Liu, D. A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot. Mathematics 2023, 11, 617. https://doi.org/10.3390/math11030617
Zhang Y, Qiao G, Wan Q, Tian L, Liu D. A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot. Mathematics. 2023; 11(3):617. https://doi.org/10.3390/math11030617
Chicago/Turabian StyleZhang, Ying, Guifang Qiao, Qi Wan, Lei Tian, and Di Liu. 2023. "A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot" Mathematics 11, no. 3: 617. https://doi.org/10.3390/math11030617
APA StyleZhang, Y., Qiao, G., Wan, Q., Tian, L., & Liu, D. (2023). A Novel Double-Layered Central Pattern Generator-Based Motion Controller for the Hexapod Robot. Mathematics, 11(3), 617. https://doi.org/10.3390/math11030617