
Age of Information Cost Minimization with No Buffers, Random Arrivals and Unreliable Channels: A PCL-Indexability Analysis


Abstract
:1. Introduction
1.1. AoI Minimization via Transmission Scheduling and Restless Bandit Framework
1.2. Related Prior Work: AoI Cost Minimization via Whittle’s Index Policy
1.3. Contributions over Prior Work
- We prove indexability for a no-buffer AoI optimization model with random packet arrivals, unreliable channels, and general nondecreasing costs, giving closed formulae for its Whittle index, under both discounted and average cost criteria. Table 1 clarifies the gaps filled by this paper on indexability under the average cost criterion. Note that the “approx.” beside Ref. [26] indicates that a proxy of the Whittle index was considered there, as indexability was not proven. As for indexability under the discounted criterion, to the best of the author’s knowledge, it has not been addressed in an AoI setting. We thus demonstrate the effectiveness of the PCL-indexability approach (based on partial conservation laws (PCLs), see [13,14,15,16,17]) to prove indexability and evaluate the Whittle index by analyzing an AoI model that has not yet yielded to the prevailing approach.
- We provide simplified Whittle index formulae for relevant special cases, in particular linear, quadratic, and threshold-type AoI costs. The resulting expressions allow for a more efficient index evaluation than direct application of the general formulae.
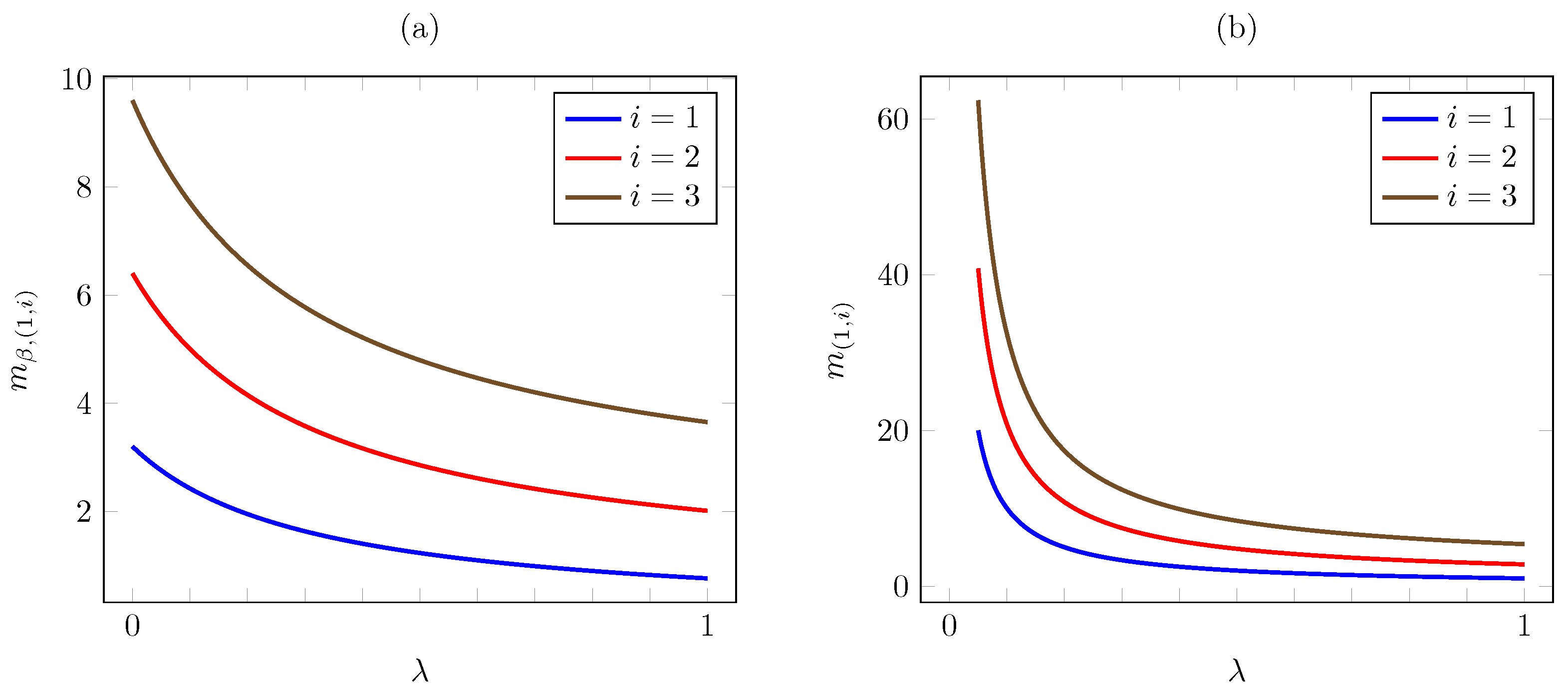
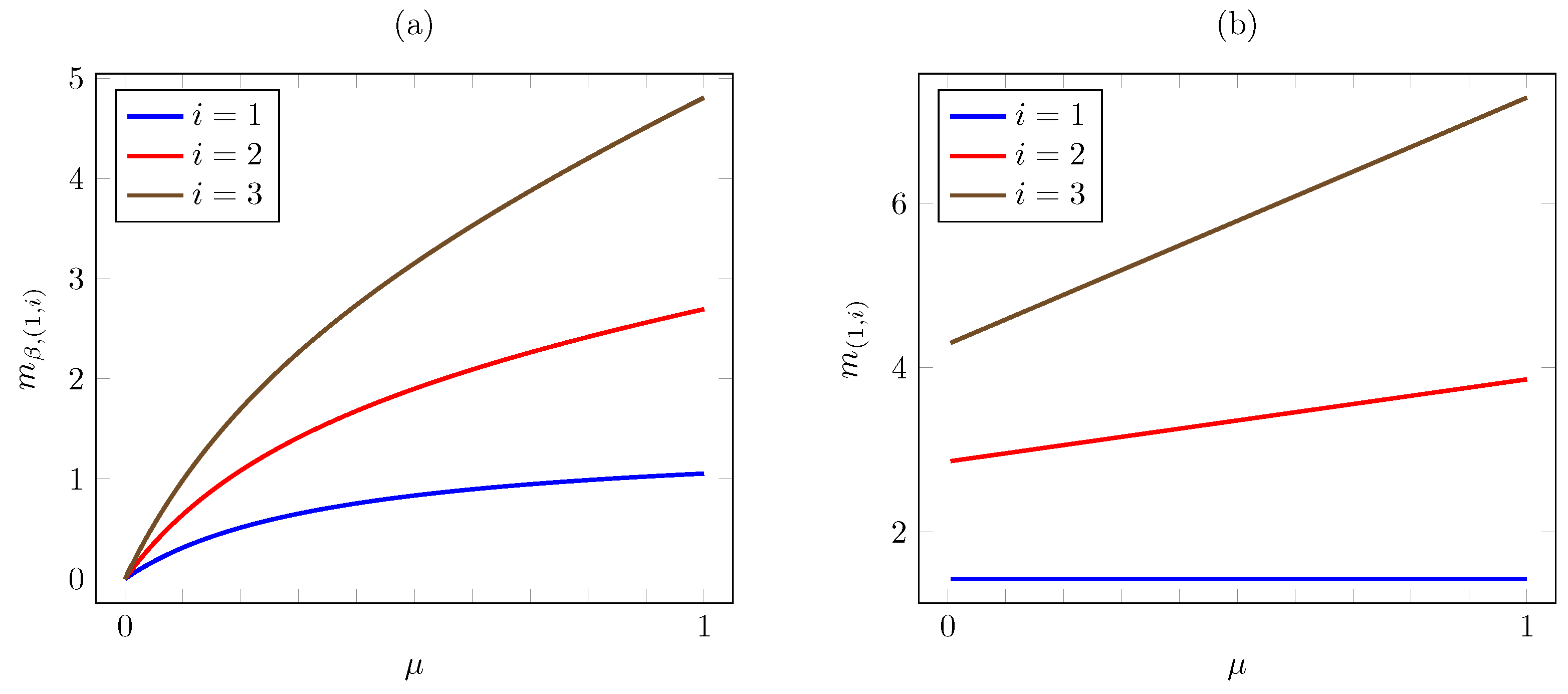
- We analyze the Whittle index formulae to elucidate how a user’s transmission priority depends on model parameters under Whittle’s policy, in particular on the probabilities of packet arrival and successful transmission. The index is nonincreasing in the former; so, other things being equal, Whittle’s policy gives higher transmission priority to users with lower arrival rates. As for the latter probability, the index increases with it for linear costs, thus prescribing higher priority to users for which transmission attempts are more likely to succeed. Yet, for nonlinear costs, the index is generally non-monotonic in that probability.
1.4. Structure of the Paper
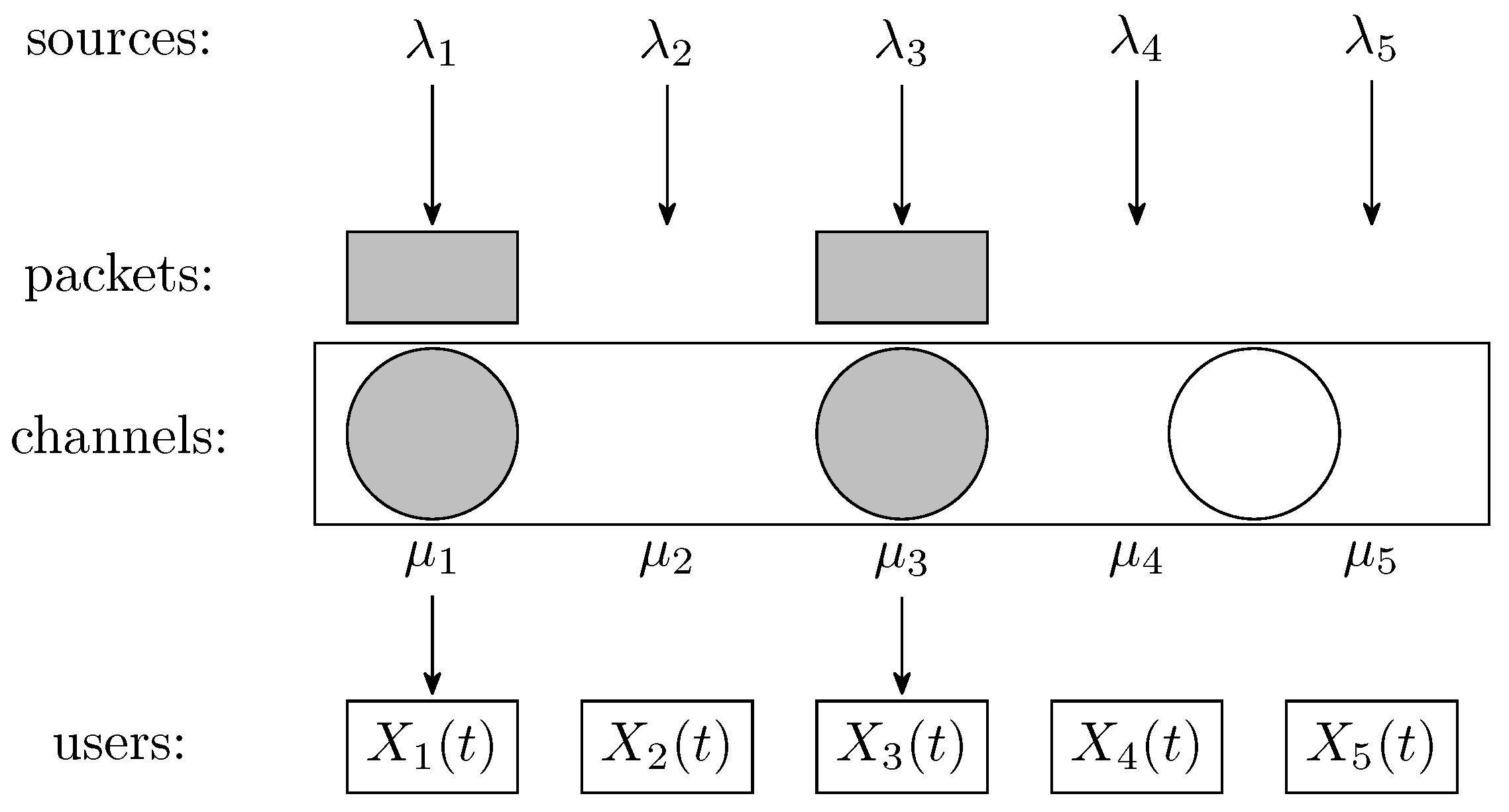
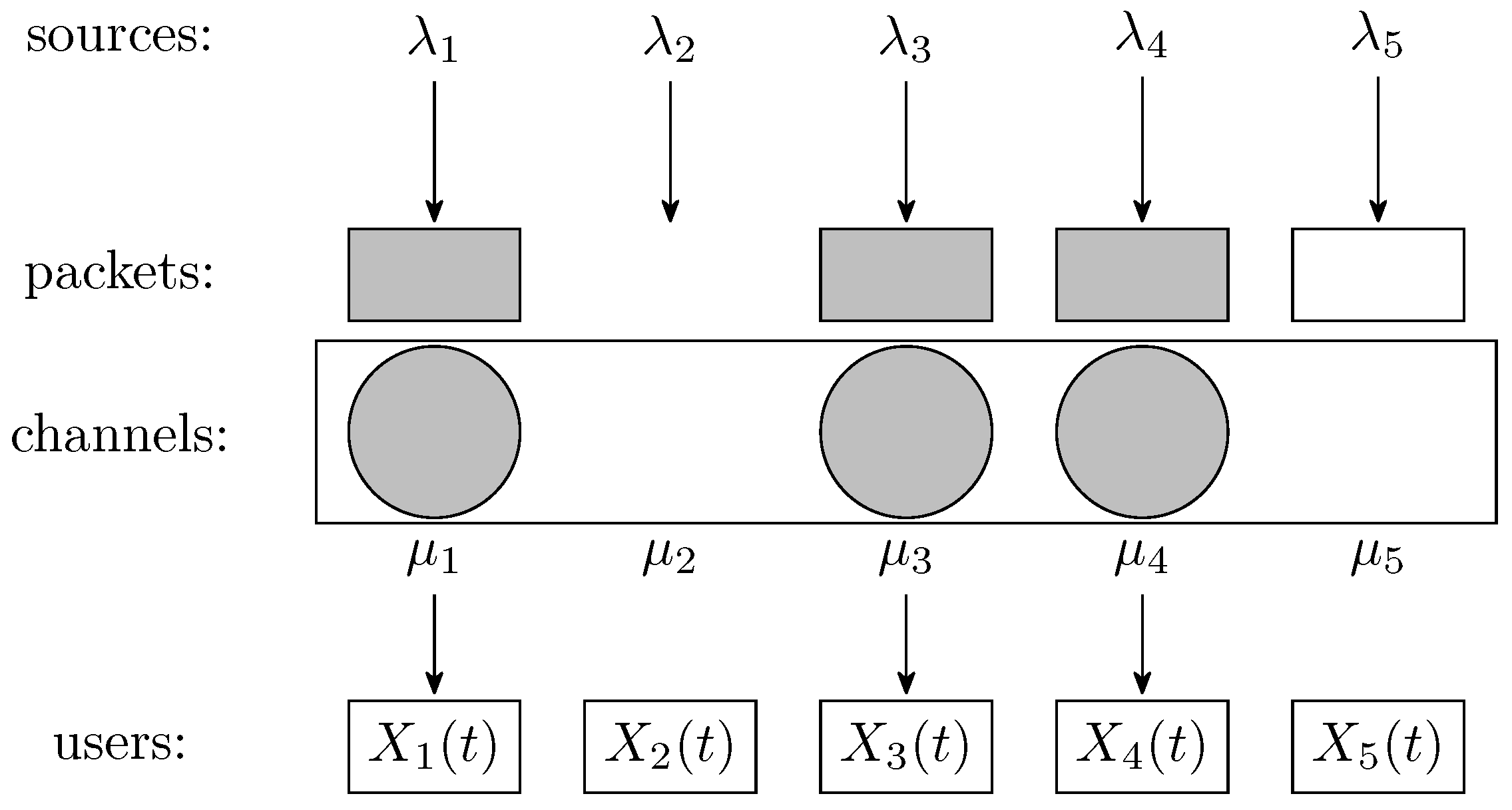
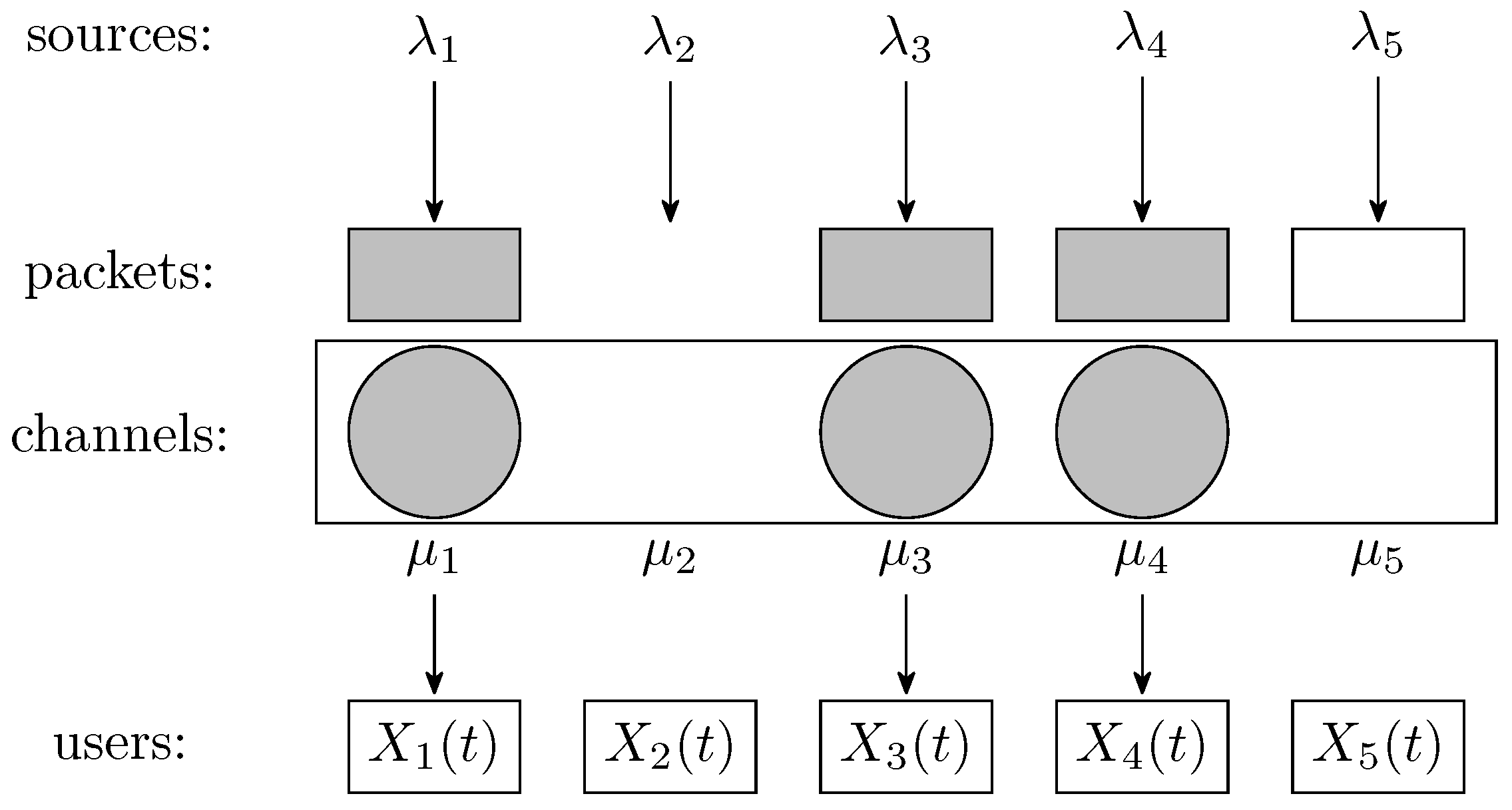
2. System Model and RMABP Formulation
3. Indexability and Whittle Index
4. PCL-Indexability Analysis: Discounted Cost Criterion
4.1. A Verification Theorem for Threshold-Indexability
- (i)
- is nonnegative and nondecreasing;
- (ii)
- (PCLI1) Positive marginal work: for every AoI and threshold .
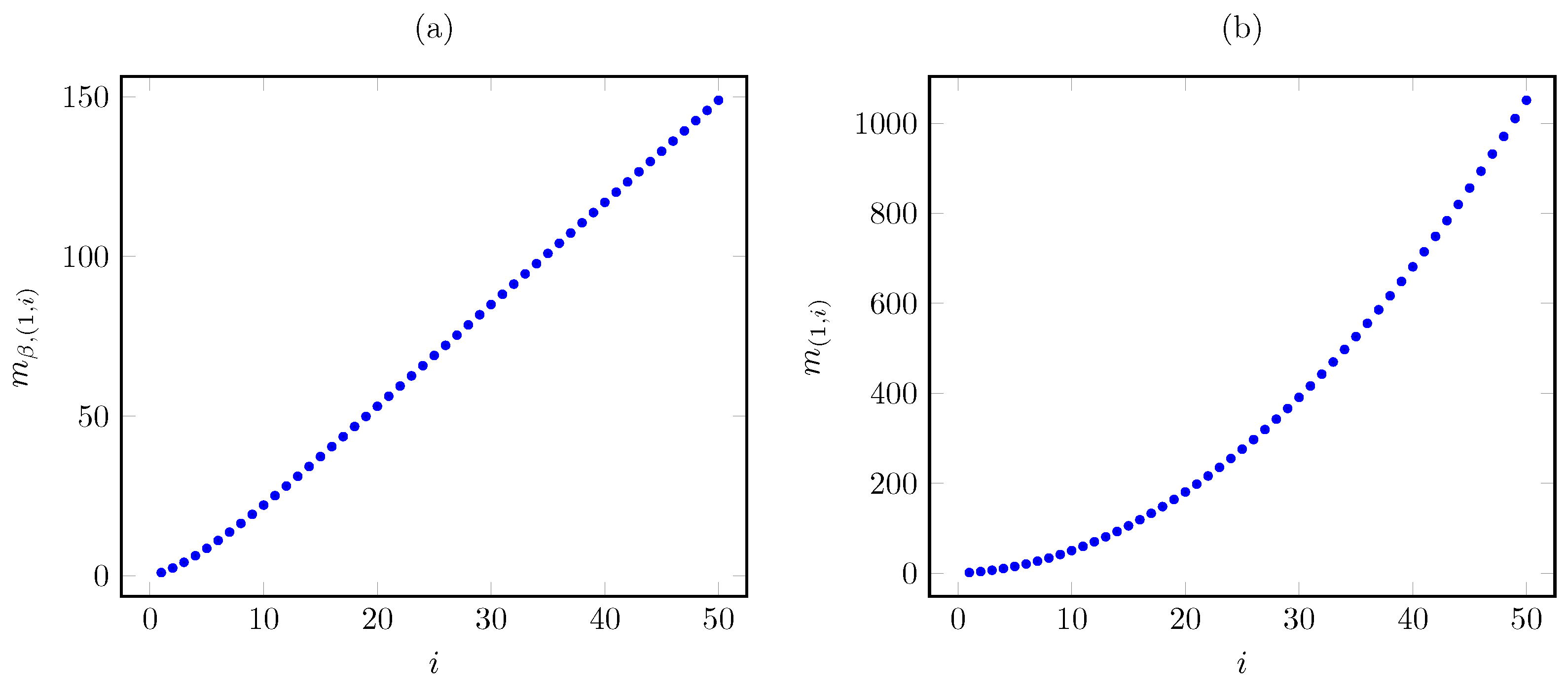
- (PCLI2) Monotone nondecreasing MP index: is nondecreasing in i.
4.2. Work Metric Analysis and Condition (PCLI1)
4.3. Cost Metric Analysis
- (a)
- (b)
- In particular, in the case ,
4.4. MP Index Analysis and Condition (PCLI2)
5. PCL-Indexability Analysis: Average Cost Criterion
5.1. Work Metric Analysis and Condition (PCLI1)
5.2. Cost Metric Analysis
5.3. MP Index Analysis and Condition (PCLI2)
6. Index Dependence on Model Parameters and Evaluation for Special Cost Functions
6.1. Monotonicity of the Whittle Index on the Arrival Rate
6.2. Whittle Index Formulae for Special Cost Functions
6.2.1. Linear AoI Cost
6.2.2. Quadratic AoI Cost
6.2.3. Threshold-Type AoI Cost
7. Discussion
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AoI | Age of Information |
| BS | Base station |
| CS | Complementary slackness |
| MABP | Multi-armed bandit problem |
| MDP | Markov decision process |
| MP | Marginal productivity |
| PCL | Partial conservation laws |
| PCLI | PCl-indexability |
| RMABP | Restless multi-armed bandit problem |
Appendix A. Work Metric Evaluation
Appendix B. Cost Metric Evaluation
References
- Kaul, S.; Gruteser, M.; Rai, V.; Kenney, J. Minimizing age of information in vehicular networks. In Proceedings of the 8th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Salt Lake City, UT, USA, 27–30 June 2011; pp. 350–358. [Google Scholar]
- Kaul, S.; Yates, R.; Gruteser, M. Real-time status: How often should one update? In Proceedings of the 31st IEEE International Conference on Computer Communications (INFOCOM), Orlando, FL, USA, 25–30 March 2012; pp. 2731–2735. [Google Scholar]
- Kosta, A.; Pappas, N.; Angelakis, V. Age of information: A new concept, metric, and tool. Found. Trends Netw. 2017, 12, 162–259. [Google Scholar] [CrossRef]
- Yates, R.D.; Sun, Y.; Brown, D.R.; Kaul, S.K.; Modiano, E.; Ulukus, S. Age of information: An introduction and survey. IEEE J. Sel. Areas Commun. 2021, 39, 1183–1210. [Google Scholar] [CrossRef]
- Puterman, M.L. Markov Decision Processes: Discrete Stochastic Dynamic Programming; Wiley: New York, NY, USA, 1994. [Google Scholar]
- Bertsekas, D.P. Dynamic Programming and Optimal Control—Approximate Dynamic Programming, 4th ed.; Athena Scientific: Nashua, NH, USA, 2012; Volume II. [Google Scholar]
- Whittle, P. Restless bandits: Activity allocation in a changing world. J. Appl. Probab. 1988, 25, 287–298. [Google Scholar] [CrossRef]
- Gittins, J.C.; Jones, D.M. A dynamic allocation index for the sequential design of experiments. Colloq. Math. Soc. János Bolyai 1974, 9, 241–266. [Google Scholar]
- Klimov, G.P. Time-sharing service systems. I. Theory Probab. Appl. 1974, 19, 532–551. [Google Scholar] [CrossRef]
- Papadimitriou, C.H.; Tsitsiklis, J.N. The complexity of optimal queuing network control. Math. Oper. Res. 1999, 24, 293–305. [Google Scholar] [CrossRef]
- Weber, R.R.; Weiss, G. On an index policy for restless bandits. J. Appl. Probab. 1990, 27, 637–648. [Google Scholar] [CrossRef]
- Niño-Mora, J. Markovian restless bandits and index policies: A review. Mathematics 2023, 11, 1639. [Google Scholar] [CrossRef]
- Niño-Mora, J. Restless bandits, partial conservation laws and indexability. Adv. Appl. Probab. 2001, 33, 76–98. [Google Scholar] [CrossRef]
- Niño-Mora, J. Dynamic allocation indices for restless projects and queueing admission control: A polyhedral approach. Math. Program. 2002, 93, 361–413. [Google Scholar] [CrossRef]
- Niño-Mora, J. Restless bandit marginal productivity indices, diminishing returns and optimal control of make-to-order/make-to-stock M/G/1 queues. Math. Oper. Res. 2006, 31, 50–84. [Google Scholar] [CrossRef]
- Niño-Mora, J. Dynamic priority allocation via restless bandit marginal productivity indices (with discussion). TOP 2007, 15, 161–198. [Google Scholar] [CrossRef]
- Niño-Mora, J. A verification theorem for threshold-indexability of real-state discounted restless bandits. Math. Oper. Res. 2020, 45, 465–496. [Google Scholar] [CrossRef]
- Kadota, I.; Sinha, A.; Uysal-Biyikoglu, E.; Singh, R.; Modiano, E. Scheduling policies for minimizing age of information in broadcast wireless networks. IEEE/ACM Trans. Netw. 2018, 26, 2637–2650. [Google Scholar] [CrossRef]
- Hsu, Y.P.; Modiano, E.; Duan, L.J. Scheduling algorithms for minimizing age of information in wireless broadcast networks with random arrivals. IEEE Trans. Mobile Comput. 2020, 19, 2903–2915. [Google Scholar] [CrossRef]
- Sun, Y.; Uysal-Biyikoglu, E.; Yates, R.D.; Koksal, C.E.; Shroff, N.B. Update or wait: How to keep your data fresh. IEEE Trans. Inform. Theory 2017, 63, 7492–7508. [Google Scholar] [CrossRef]
- Jhunjhunwala, P.R.; Moharir, S. Age-of-information aware scheduling. In Proceedings of the IEEE International Conference on Signal Processing and Communications (SPCOM), Bangalore, India, 10–16 April 2018; pp. 222–226. [Google Scholar]
- Tripathi, V.; Modiano, E. A Whittle index approach to minimizing functions of age of information. In Proceedings of the 57th Annual Allerton Conference on Communication, Control, and Computing, Monticello, IL, USA, 24–27 September 2019; pp. 1160–1167. [Google Scholar]
- Maatouk, A.; Kriouile, S.; Assaad, M.; Ephremides, A. On the optimality of the Whittle’s index policy for minimizing the age of information. IEEE Trans. Wirel. Commun. 2021, 20, 1263–12770. [Google Scholar] [CrossRef]
- Kriouile, S.; Assaad, M.; Maatouk, A. On the global optimality of Whittle’s index policy for minimizing the age of information. IEEE Trans. Inf. Theory 2022, 68, 572–600. [Google Scholar] [CrossRef]
- Sun, J.Z.; Jiang, Z.Y.; Krishnamachari, B.; Zhou, S.; Niu, Z.S. Closed-form Whittle’s index-enabled random access for timely status update. IEEE Trans. Commun. 2020, 68, 1538–1551. [Google Scholar] [CrossRef]
- Sun, J.Z.; Jiang, Z.Y.; Zhou, S.; Niu, Z.S. Optimizing information freshness in broadcast network with unreliable links and random arrivals: An approximate index policy. In Proceedings of the 38th IEEE International Conference on Computer Communications Workshops (INFOCOM WKSHPS), Paris, France, 29 April–2 May 2019; pp. 115–120. [Google Scholar]
- Tang, Z.F.; Sun, Z.; Yang, N.; Zhou, X.Y. Whittle index-based scheduling policy for minimizing the cost of age of information. IEEE Commun. Lett. 2022, 26, 54–58. [Google Scholar] [CrossRef]
- Badia, L.; Munari, A. Discounted age of information for networks of constrained devices. In Proceedings of the 20th Mediterranean Communication and Computer Networking Conference (MedComNet), Pafos, Cyprus, 1–3 June 2022; pp. 43–46. [Google Scholar] [CrossRef]
- Wu, T.; Wen, P.; Tang, S.D. Optimal scheduling strategy of AUV based on importance and age of information. Wirel. Netw. 2023, 29, 87–95. [Google Scholar] [CrossRef]
- Zhang, M.; Arafa, A.; Huang, J.; Poor, H.V. Pricing fresh data. IEEE J. Sel. Areas Commun. 2021, 39, 1211–1225. [Google Scholar] [CrossRef]
- Niño-Mora, J. A dynamic page-refresh index policy for web crawlers. In Proceedings of the 21st International Conference on Analytical and Stochastic Modelling Techniques and Applications (ASMTA), Budapest, Hungary, 30 June–2 July 2014; Sericola, B., Telek, M., Horváth, G., Eds.; Lecture Notes in Computer Science. Springer: Berlin/Heidelberg, Germany, 2014; Volume 8499, pp. 46–60. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Arrivals/Channels | Reliable | Unreliable | |||
|---|---|---|---|---|---|
| Deterministic | Costs/Buffers | No | Yes | No | Yes |
| Linear | [18] | [25] | [18] | [26] (approx.) | |
| Nonlinear | [22] | [27] | [22] | [27] | |
| Random | Costs/Buffers | No | Yes | No | Yes |
| Linear | [19] | [25] | this paper | [26] (approx.) | |
| Nonlinear | this paper | [27] | this paper | [27] | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niño-Mora, J. Age of Information Cost Minimization with No Buffers, Random Arrivals and Unreliable Channels: A PCL-Indexability Analysis. Mathematics 2023, 11, 4394. https://doi.org/10.3390/math11204394
Niño-Mora J. Age of Information Cost Minimization with No Buffers, Random Arrivals and Unreliable Channels: A PCL-Indexability Analysis. Mathematics. 2023; 11(20):4394. https://doi.org/10.3390/math11204394
Chicago/Turabian StyleNiño-Mora, José. 2023. "Age of Information Cost Minimization with No Buffers, Random Arrivals and Unreliable Channels: A PCL-Indexability Analysis" Mathematics 11, no. 20: 4394. https://doi.org/10.3390/math11204394
APA StyleNiño-Mora, J. (2023). Age of Information Cost Minimization with No Buffers, Random Arrivals and Unreliable Channels: A PCL-Indexability Analysis. Mathematics, 11(20), 4394. https://doi.org/10.3390/math11204394