
Parametrization and Optimal Tuning of Constrained Series PIDA Controller for IPDT Models †



Abstract
:1. Introduction
2. MRDP-Based PIDA Controller Design
2.1. Parallel PIDA and PIDA Controllers with Automatic Reset
2.2. Process Approximation by IPDT Model
2.3. Speed- and Shape-Related Performance Measures
2.4. MRDP-PIDA Controllers for IPDT Models
2.5. Design of Controller Filters
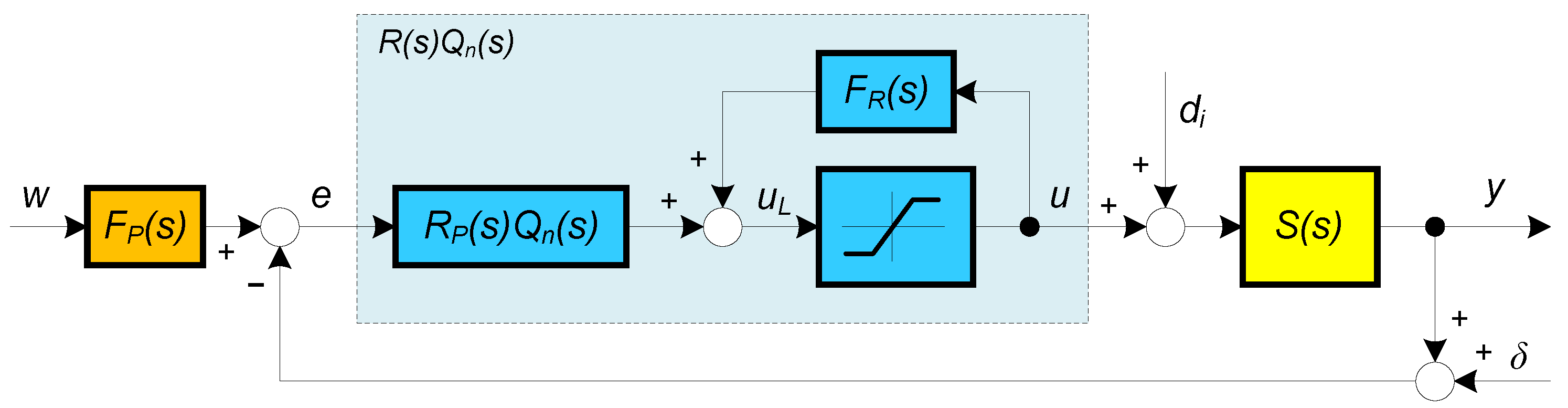
2.6. Basic Constrained Series MRDP-PIDA Modifications
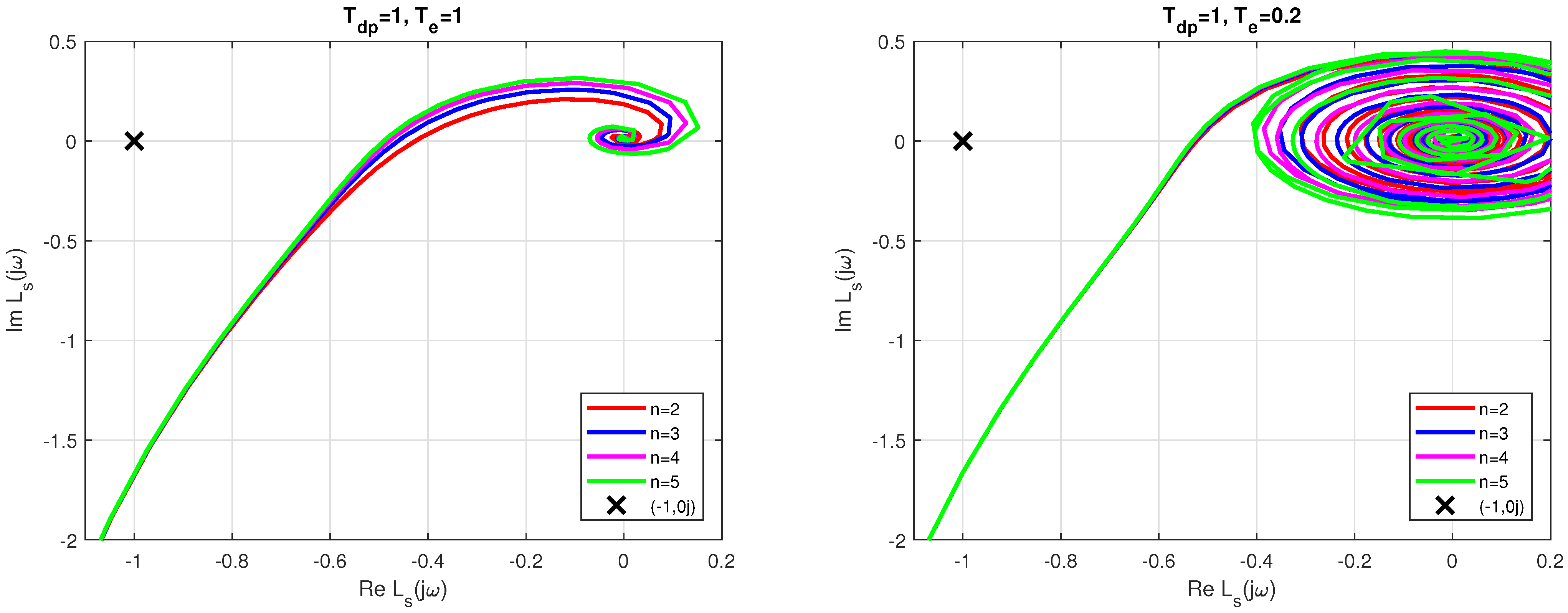
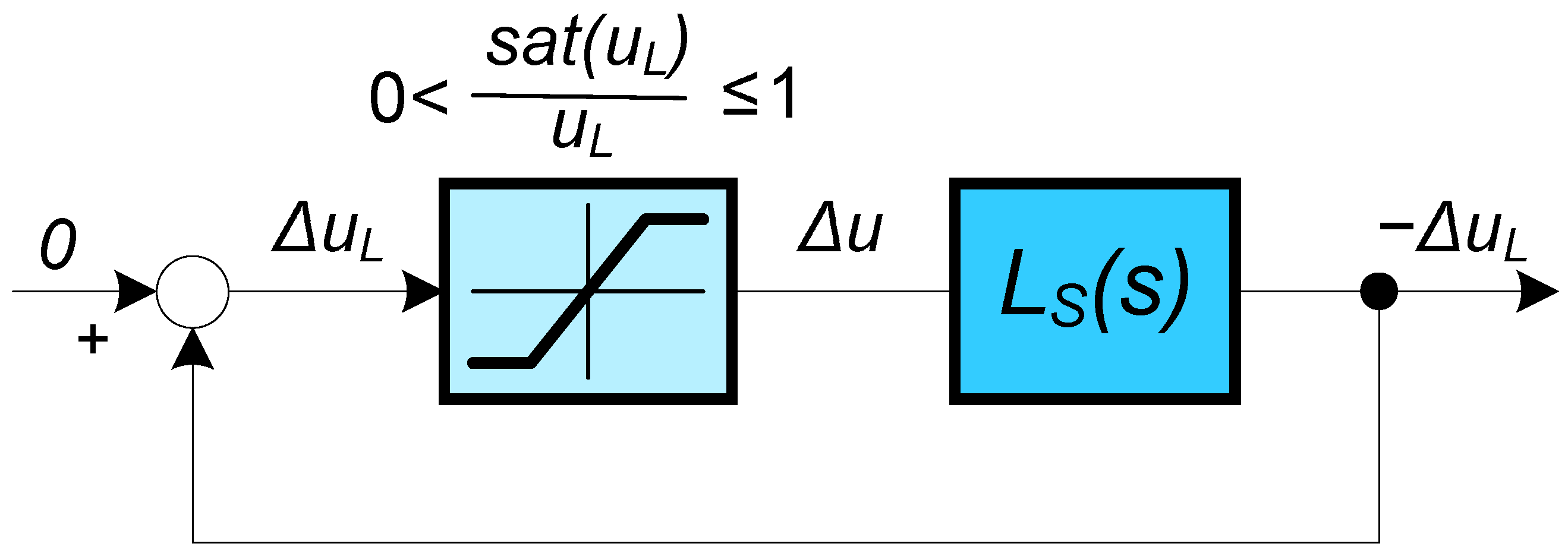
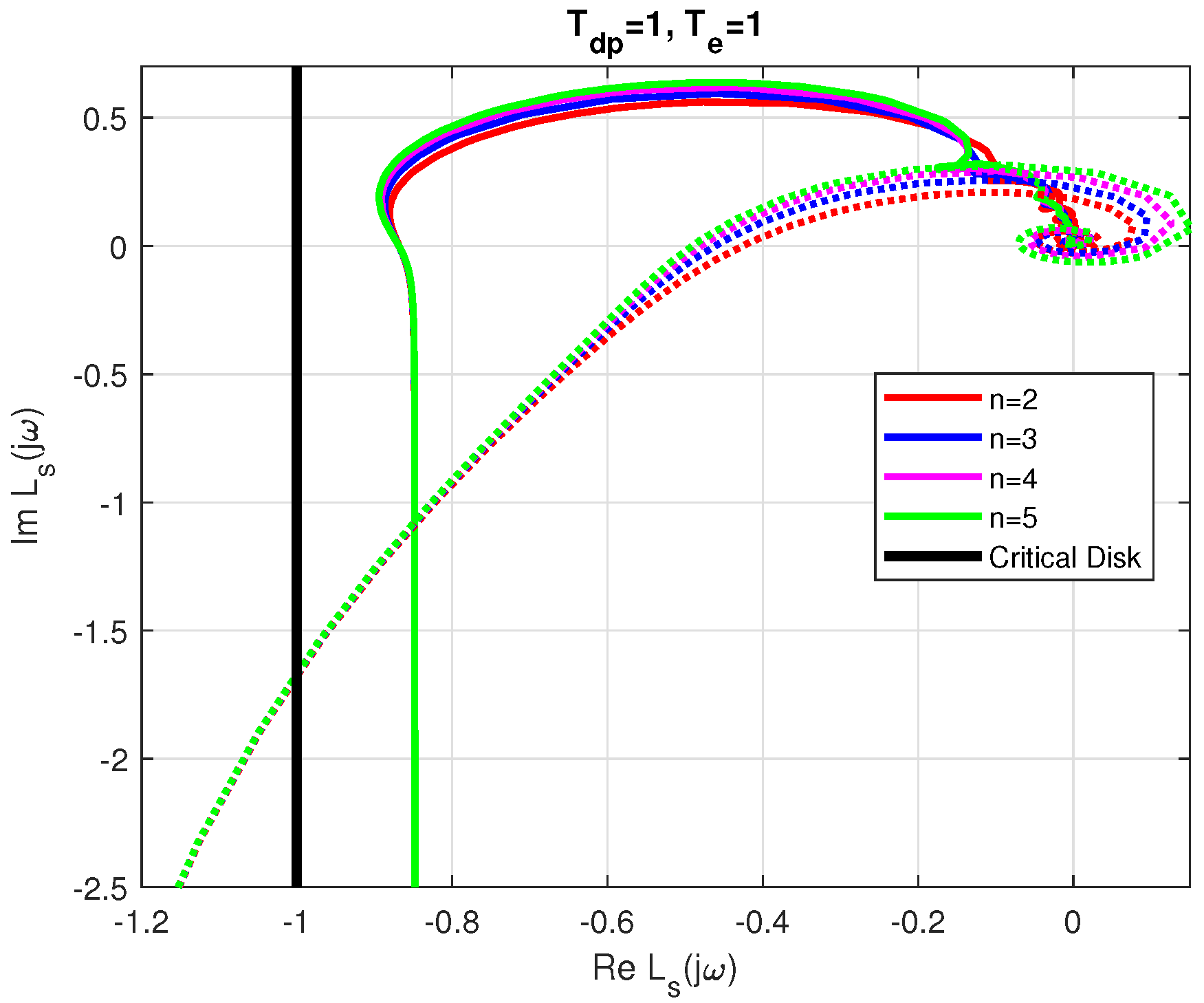
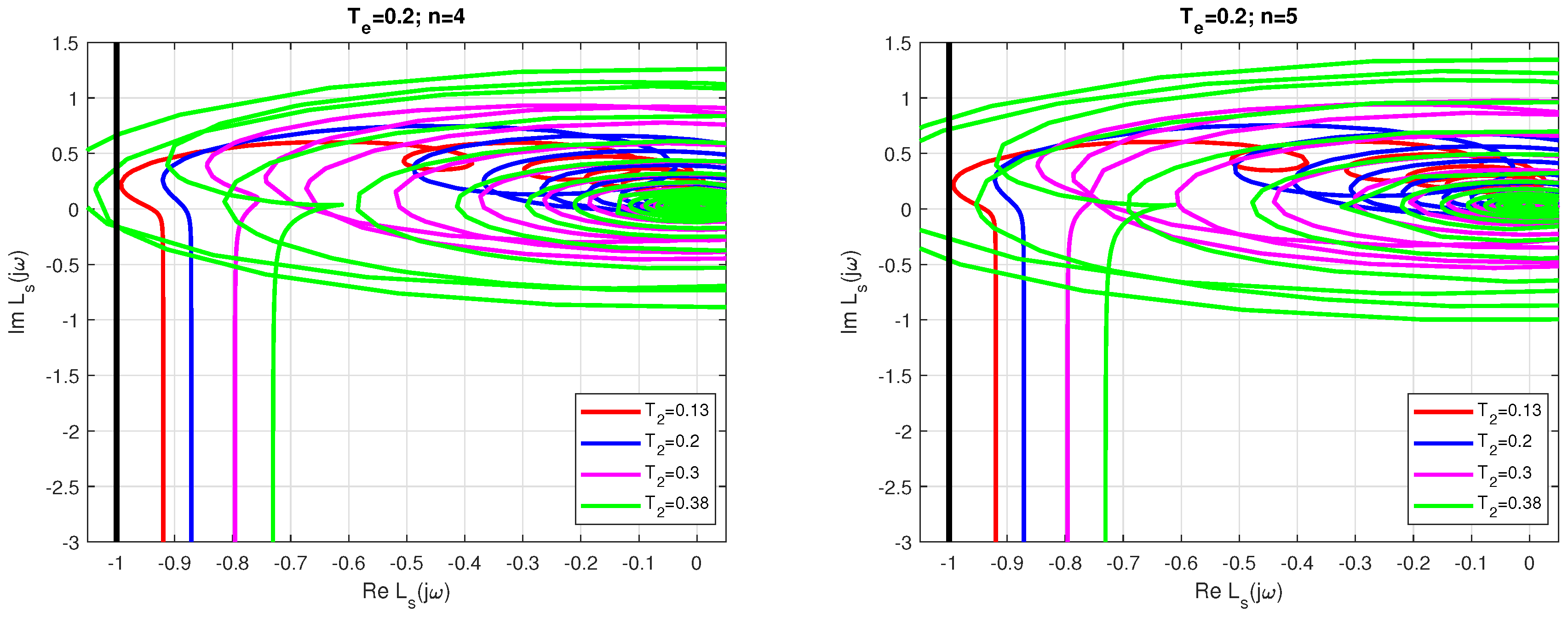
2.7. Absolute Stability Test
2.8. Design of Prefilter
3. Problem Formulation
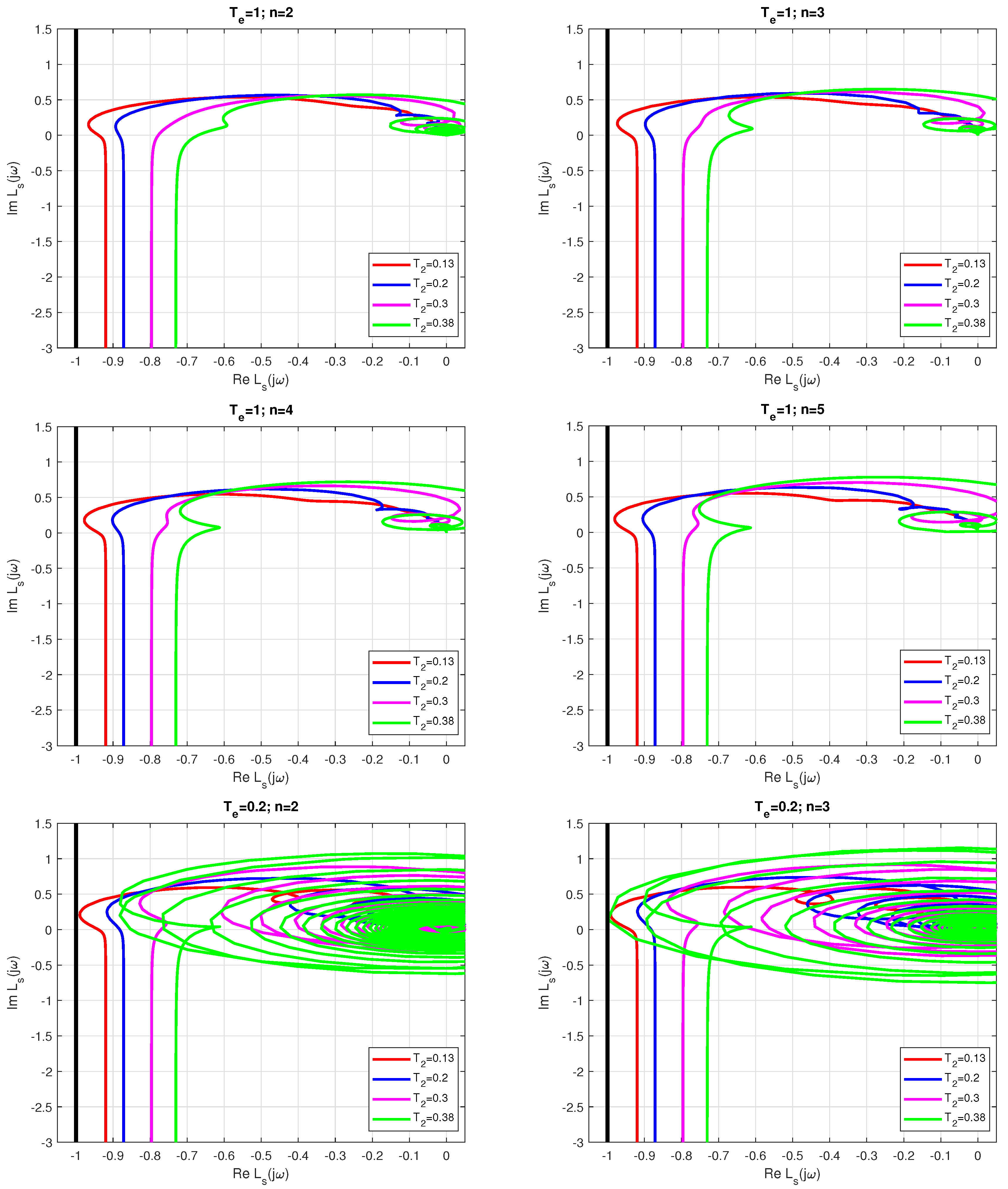
3.1. Effects of the Tuning Parameters on Absolute Stability
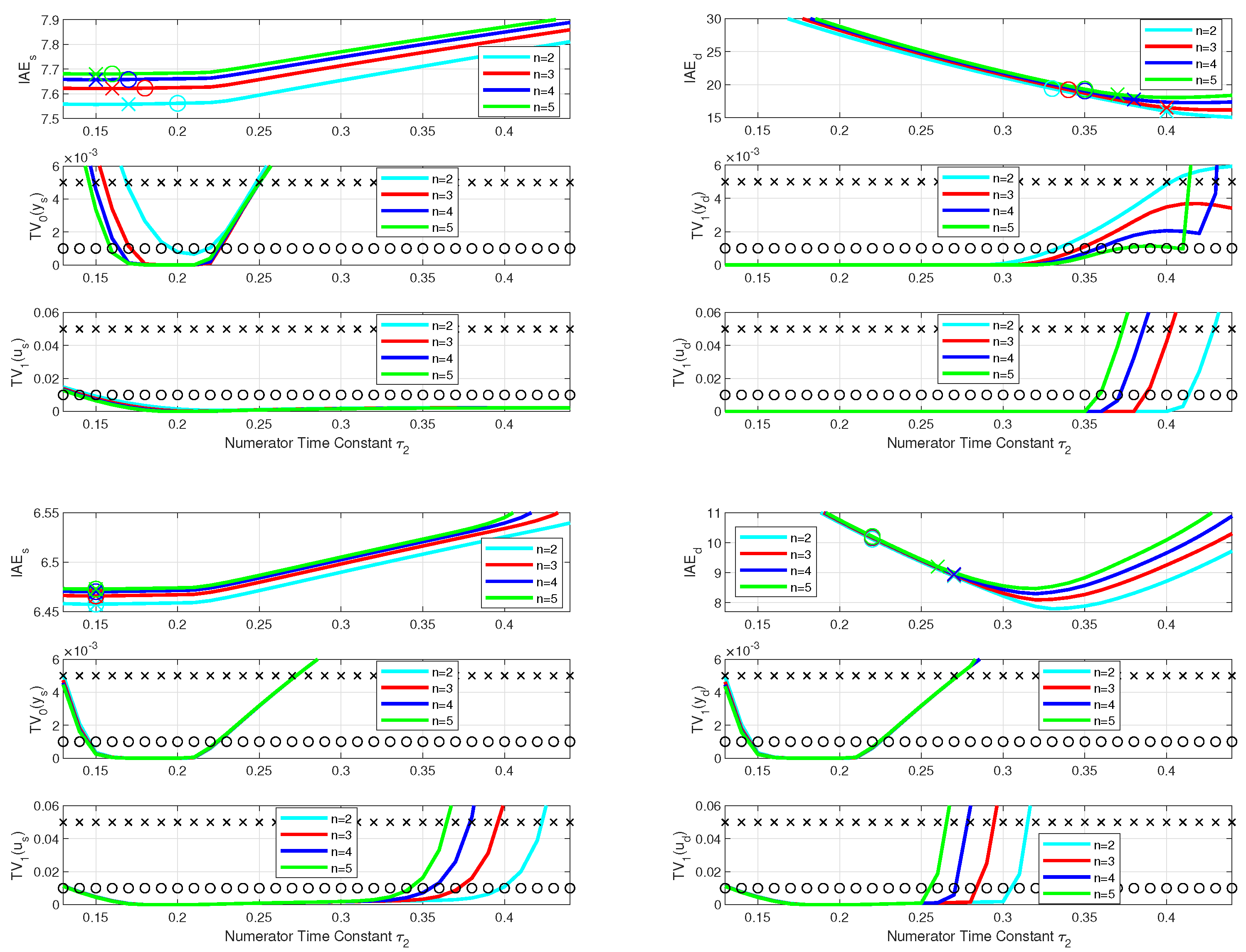
3.2. Quantitative Evaluation of the Effects of the Tuning Parameters
3.3. One-Dimensional Performance Test
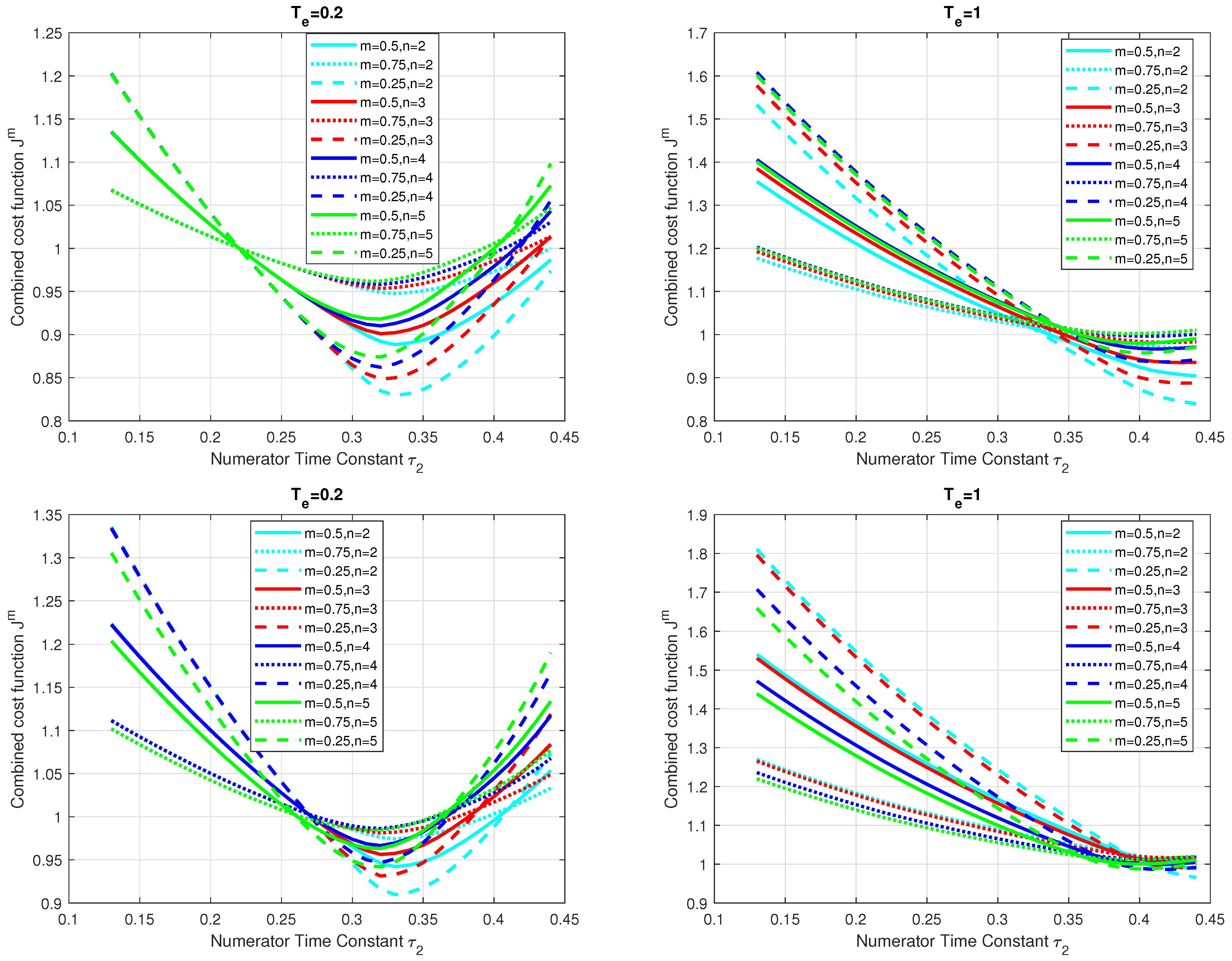
3.4. Evaluation of the Controller Tuning
4. SIMC Controller Design
4.1. Simplified Process Modeling
4.2. Design of the SIMC Controller
4.3. SIMC Design for Higher-Order Models
- Once the desired closed-loop transfer function (57) has been chosen, the filter time constant , which is required to implement the controller, should be systematically added to the process model using the aforementioned half-rule. Instead, the implementation of a series PID controller with an additional first order filter was proposed in [31]The author admitted that in practice (especially for noisy processes) larger values of have to be used. However, it is not clear why the filter was not systematically included in the design using the half rule. Indeed, the design of the controller without considering is not accurate, especially if you use a higher-order filter to reduce the noise level.
- The controller design is based on the setpoint response requirements, so the performance of disturbance responses can only be considered indirectly.
- The SIMC design does not address possible control signal (or state) constraints.
4.4. Prefilter in SIMC Design
5. IPDT System Control
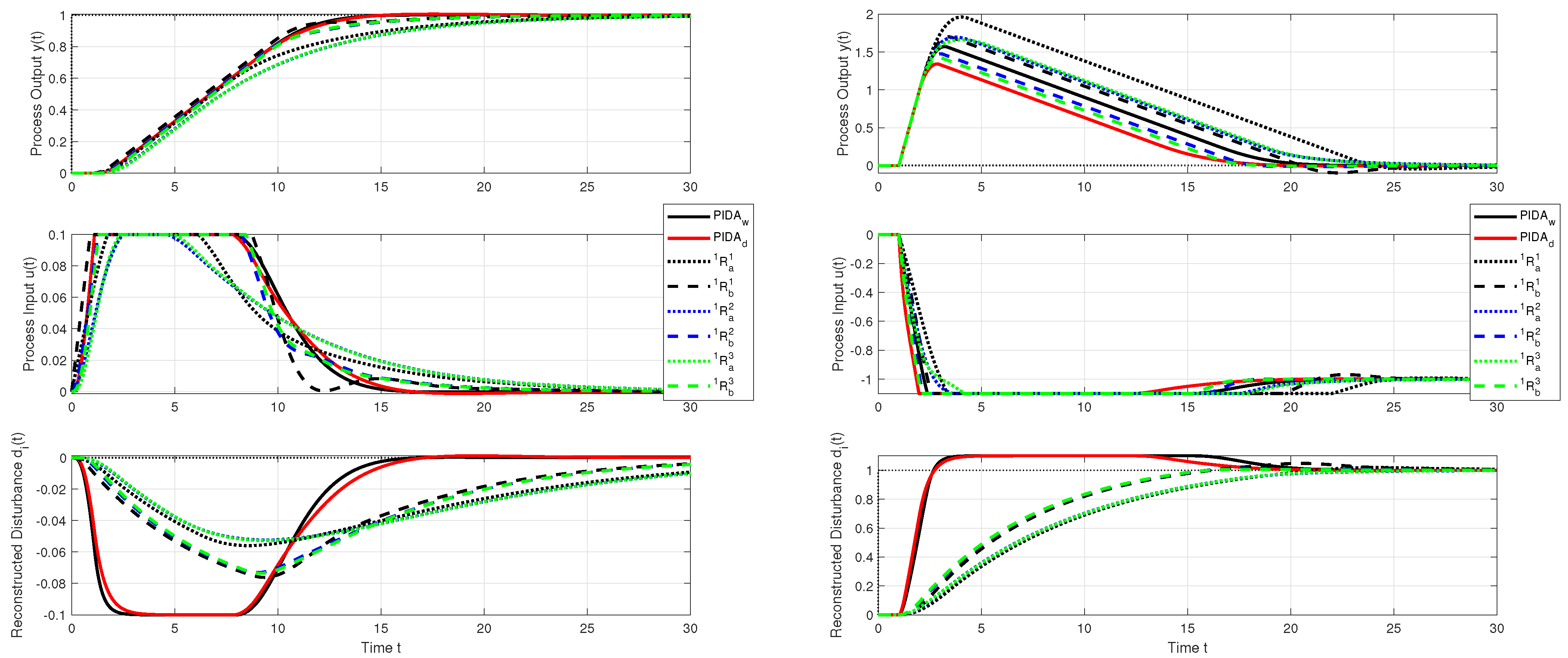
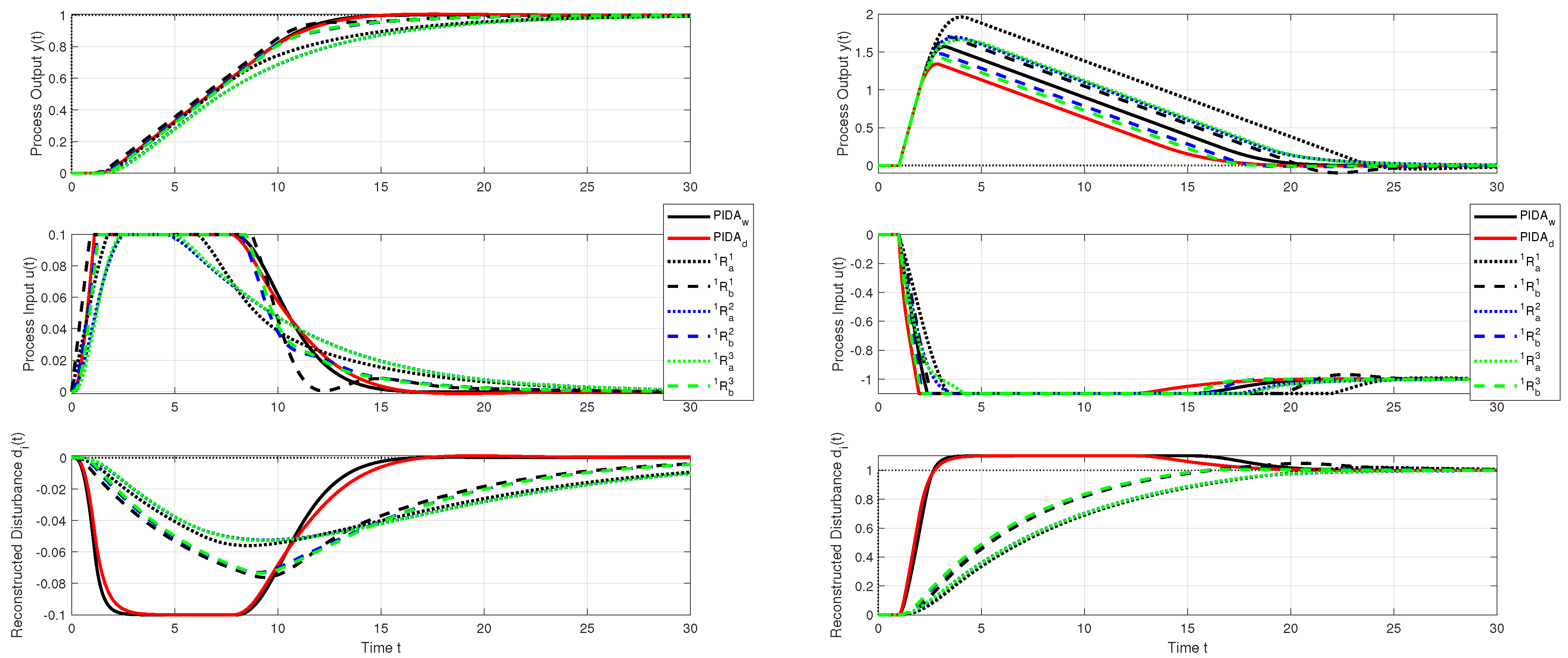
5.1. Setpoint and Disturbance Responses without Measurement Noise
5.2. Measurement Noise Generated by the Uniform Random Number Noise Generator
6. Stable Process Control
6.1. Step Response Based Approximation of Stable Process by IPDT Model
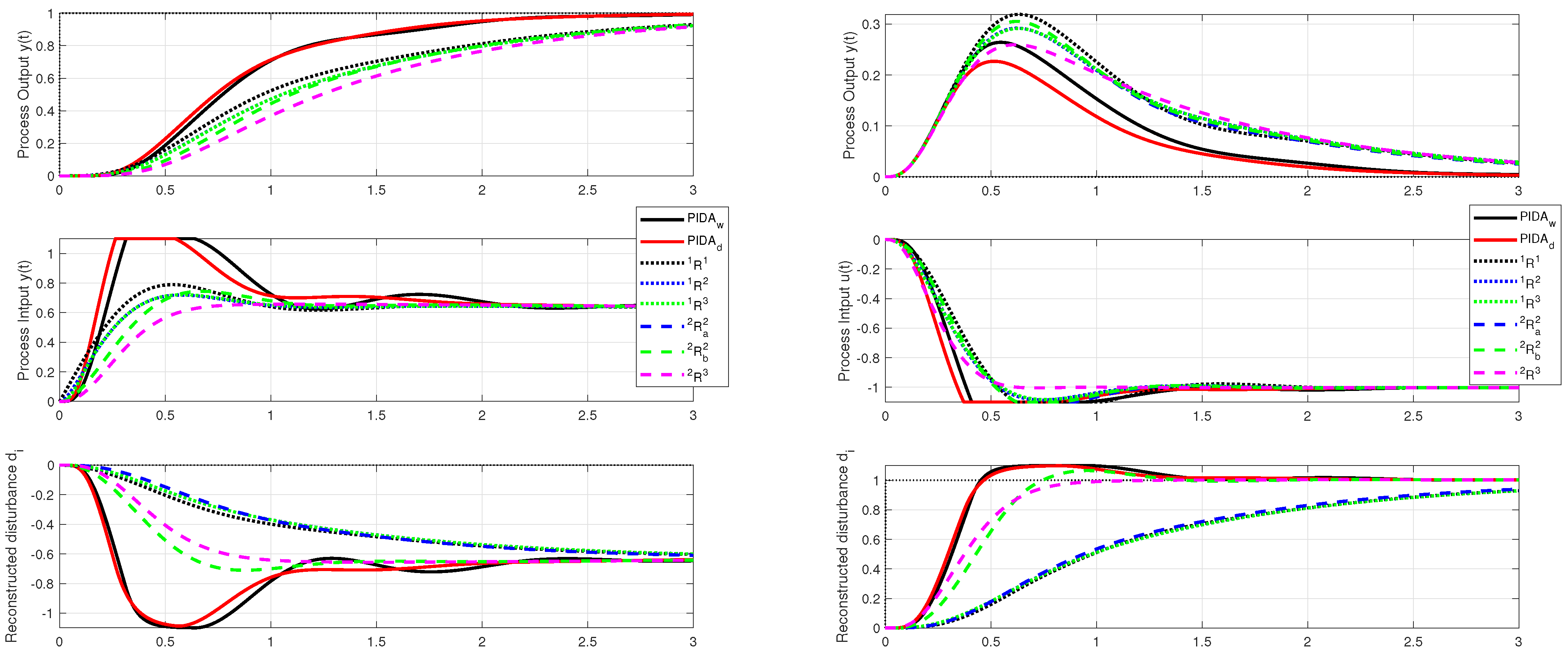
6.2. Setpoint and Disturbance Responses—No Noise
7. Discussion of the Results Obtained
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 1P | One-Pulse, response with 2 monotonic segments (1 extreme point) |
| 3P | Three-Pulse, response with 4 monotonic segments (3 extreme points) |
| ARC | Automatic-Reset Controller |
| FOTD | First-Order Time-Delayed |
| Integral of Absolute Error | |
| IMC | Internal Model Control |
| IPDT | Integrator Plus Dead-Time |
| MRDP | Multiple Real Dominant Pole |
| PDA | Proportional-Derivative-Accelerative |
| PI | Proportional-Integral |
| PIDA | Proportional-Integral-Derivative-Accelerative |
| SIMC | SIMple Control |
| SOTD | Second-Order Time-Delayed |
| TOTD | Third-Order Time-Delayed |
| TV | Total Variation |
| TV | Deviation from Monotonicity |
| TV | Deviation from 1P Shape |
| TV | Deviation from 3P Shape |
References
- Jung, S.; Dorf, R.C. Novel Analytic Technique for PID and PIDA Controller Design. IFAC Proc. Vol. 1996, 29, 1146–1151. [Google Scholar] [CrossRef]
- Jung, S.; Dorf, R. Analytic PIDA controller design technique for a third order system. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 11–13 December 1996; Volume 3, pp. 2513–2518. [Google Scholar]
- Ukakimaparn, P.; Pannil, P.; Boonchuay, P.; Trisuwannawat, T. PIDA Controller designed by Kitti’s Method. In Proceedings of the 2009 ICCAS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 1547–1550. [Google Scholar]
- Sahib, M.A. A novel optimal PID plus second order derivative controller for AVR system. Eng. Sci. Technol. Int. J. 2015, 18, 194–206. [Google Scholar] [CrossRef]
- Oladipo, S.; Sun, Y.; Wang, Z. An effective hFPAPFA for a PIDA-based hybrid loop of Load Frequency and terminal voltage regulation system. In Proceedings of the 2021 IEEE PES/IAS PowerAfrica, Nairobi, Kenya, 23–27 August 2021; pp. 1–5. [Google Scholar]
- Arulvadivu, J.; Manoharan, S.; Lal Raja Singh, R.; Giriprasad, S. Optimal design of proportional integral derivative acceleration controller for higher-order nonlinear time delay system using m-MBOA technique. Int. J. Numer. Model. 2022, 35, e3016. [Google Scholar] [CrossRef]
- Zandavi, S.M.; Chung, V.; Anaissi, A. Accelerated Control Using Stochastic Dual Simplex Algorithm and Genetic Filter for Drone Application. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 2180–2191. [Google Scholar] [CrossRef]
- Mandic, P.D.; Boskovic, M.C.; Sekara, T.B.; Lazarevic, M.P. A new optimisation method of PIDC controller under constraints on robustness and sensitivity to measurement noise using amplitude optimum principle. Int. J. Control. 2021, 1–15. [Google Scholar] [CrossRef]
- Boskovic, M.C.; Sekara, T.B.; Rapaic, M.R. Novel tuning rules for PIDC and PID load frequency controllers considering robustness and sensitivity to measurement noise. Int. J. Electr. Power Energy Syst. 2020, 114, 105416. [Google Scholar] [CrossRef]
- Boskovic, M.C.; Sekara, T.B.; Rapaic, M.R. An Optimal Design of 2DoF FOPID/PID Controller using Non-symmetrical Optimum Principle for an AVR System with Time Delay. In Proceedings of the 2022 21st International Symposium INFOTEH-JAHORINA, INFOTEH 2022, East Sarajevo, Bosnia and Herzegovina, 16–18 March 2022. [Google Scholar] [CrossRef]
- Veinović, S.; Stojić, D.; Ivanović, L. Optimized PIDD2 controller for AVR systems regarding robustness. Int. J. Electr. Power Energy Syst. 2023, 145, 108646. [Google Scholar] [CrossRef]
- Kumar, M.; Hote, Y.V. Robust PIDD2 Controller Design for Perturbed Load Frequency Control of an Interconnected Time-Delayed Power Systems. IEEE Trans. Control. Syst. Technol. 2021, 29, 2662–2669. [Google Scholar] [CrossRef]
- Kumar, M.; Hote, Y.V. Real-Time Performance Analysis of PIDD2 Controller for Nonlinear Twin Rotor TITO Aerodynamical System. J. Intell. Robot. Syst. Theory Appl. 2021, 101, 55. [Google Scholar] [CrossRef]
- Kumar, M.; Hote, Y.V. PIDD2 Controller Design Based on Internal Model Control Approach for a Non-Ideal DC-DC Boost Converter. In Proceedings of the 2021 IEEE Texas Power and Energy Conference, TPEC 2021, College Station, TX, USA, 2–5 February 2021. [Google Scholar]
- Kumar, M.; Hote, Y.V.; Sikander, A. A Novel Cascaded CDM-IMC based PIDA Controller Design and its Application. In Proceedings of the 2023 IEEE IAS Global Conference on Renewable Energy and Hydrogen Technologies (GlobConHT), Male, Maldives, 11–12 March 2023; pp. 1–7. [Google Scholar]
- Ferrari, M.; Visioli, A. A software tool to understand the design of PIDA controllers. IFAC-PapersOnLine 2022, 55, 249–254. [Google Scholar] [CrossRef]
- Visioli, A.; Sánchez-Moreno, J. A relay-feedback automatic tuning methodology of PIDA controllers for high-order processes. Int. J. Control. 2022, 1–8. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional-order systems and PI/sup /spl lambda//D/sup /spl mu//-controllers. IEEE Trans. Autom. Control. 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional Order Systems in Industrial Automation: A Survey. IEEE Trans. Ind. Inf. 2011, 7, 582–591. [Google Scholar] [CrossRef]
- Lanusse, P.; Malti, R.; Melchior, P. CRONE control system design toolbox for the control engineering community: Tutorial and case study. Philos. Trans. R. Soc. 2013, 371, 20120149. [Google Scholar] [CrossRef] [PubMed]
- Precup, R.E.; Angelov, P.; Costa, B.S.J.; Sayed-Mouchaweh, M. An overview on fault diagnosis and nature-inspired optimal control of industrial process applications. Comput. Ind. 2015, 74, 75–94. [Google Scholar] [CrossRef]
- Mousavi, Y.; Alfi, A. A memetic algorithm applied to trajectory control by tuning of Fractional Order Proportional-Integral-Derivative controllers. Appl. Soft Comput. 2015, 36, 599–617. [Google Scholar] [CrossRef]
- Tepljakov, A.; Alagoz, B.B.; Yeroglu, C.; Gonzalez, E.; HosseinNia, S.H.; Petlenkov, E. FOPID Controllers and Their Industrial Applications: A Survey of Recent Results. IFAC-PapersOnLine 2018, 51, 25–30. [Google Scholar] [CrossRef]
- Thomson, D.; Padula, F. Introduction to Fractional-Order Control: A Practical Laboratory Approach. IFAC-PapersOnLine 2022, 55, 126–131. [Google Scholar] [CrossRef]
- Cökmez, E.; Kaya, I. An analytical solution of fractional order PI controller design for stable/unstable/integrating processes with time delay. Turk. J. Electr. Eng. Comput. Sci. 2023, 31, 626–645. [Google Scholar] [CrossRef]
- Huba, M.; Bistak, P.; Vrancic, D. Series PIDA Controller Design for IPDT Processes. Appl. Sci. 2023, 13, 2040. [Google Scholar] [CrossRef]
- Huba, M.; Bisták, P.; Vrančić, D. Series PID Control with Higher-Order Derivatives for Processes Approximated by IPDT Models. IEEE TASE 2023, accepted. [Google Scholar] [CrossRef]
- Huba, M.; Bisták, P.; Vrančić, D. Optimizing constrained series PIDA controller for speed loops inspired by Ziegler-Nichols. In Proceedings of the EDPE, High Tatras, Slovakia, 25–27 September 2023. [Google Scholar]
- Huba, M.; Bisták, P.; Vrančić, D. Designing automatic-reset controllers with higher-order derivatives. In Proceedings of the EDPE, High Tatras, Slovakia, 25–27 September 2023. [Google Scholar]
- Kumar, M.; Hote, Y.V. Robust CDA-PIDA Control Scheme for Load Frequency Control of Interconnected Power Systems. IFAC-PapersOnLine 2018, 51, 616–621. [Google Scholar] [CrossRef]
- Skogestad, S. Simple analytic rules for model reduction and PID controller tuning. J. Process. Control. 2003, 13, 291–309. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. PID Controllers: Theory, Design, and Tuning, 2nd ed.; Instrument Society of America, Research Triangle Park: Durham, NC, USA, 1995. [Google Scholar]
- Ogata, K. Modern Control Engineering, 3rd ed.; Marcel Dekker: New York, NY, USA, 1997. [Google Scholar]
- Brogan, W.L. Modern Control Theory, 3rd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Bisták, P.; Huba, M.; Chamraz, S.; Vrančić, D. IPDT Model-Based Ziegler-Nichols Tuning Generalized to Controllers with Higher-Order Derivatives. Sensors 2023, 23, 3787. [Google Scholar] [CrossRef]
- Bennett, S. The Past of PID Controllers. IFAC Proc. Vol. 2000, 33, 1–11. [Google Scholar] [CrossRef]
- Huba, M.; Gao, Z. Uncovering Disturbance Observer and Ultra-Local Plant Models in Series PI Controllers. Symmetry 2022, 14, 640. [Google Scholar] [CrossRef]
- Huba, M.; Bisták, P. Should We Forget the PID Control? In Proceedings of the 2022 20th International Conference on Emerging eLearning Technologies and Applications (ICETA), Stary Smokovec, Slovakia, 20–21 October 2022; pp. 225–230. [Google Scholar]
- Huba, M.; Chamraz, S.; Bisták, P.; Vrančić, D. Making the PI and PID Controller Tuning Inspired by Ziegler and Nichols Precise and Reliable. Sensors 2021, 18, 6157. [Google Scholar] [CrossRef]
- Huba, M.; Vrančić, D.; Bisták, P. PID Control with Higher Order Derivative Degrees for IPDT Plant Models. IEEE Access 2021, 9, 2478–2495. [Google Scholar] [CrossRef]
- Kothare, M.; Campo, P.J.; Morari, M.; Nett, C.V. A Unified Framework for the Study of Anti-windup Designs. Automatica 1994, 30, 1869–1883. [Google Scholar] [CrossRef]
- O’Dwyer, A. Handbook of PI and PID Controller Tuning Rules, 3rd ed.; Imperial College Press: London, UK, 2009. [Google Scholar]
- Huba, M.; Bistak, P.; Vrancic, D. Robust Stability Analysis of Filtered PI and PID Controllers for IPDT Processes. Mathematics 2023, 11, 30. [Google Scholar] [CrossRef]
- Huba, M. Performance measures, performance limits and optimal PI control for the IPDT plant. J. Process. Control. 2013, 23, 500–515. [Google Scholar] [CrossRef]
- Huba, M.; Vrančić, D. Extending the Model-Based Controller Design to Higher-Order Plant Models and Measurement Noise. Symmetry 2021, 2021, 798. [Google Scholar] [CrossRef]
- Grimholt, C.; Skogestad, S. Optimal PI and PID control of first-order plus delay processes and evaluation of the original and improved SIMC rules. J. Process. Control. 2018, 70, 36–46. [Google Scholar] [CrossRef]
- Feldbaum, A. Optimal Control Systems; Academic Press: New York, NY, USA, 1965. [Google Scholar]
- Li, Y.; Bi, J.; Han, W.; Tan, W. Tuning of PID/PIDD2 controllers for integrating processes with robustness specification. ISA Trans. 2023, 140, 224–236. [Google Scholar] [CrossRef] [PubMed]
- Huba, M.; Vrančić, D. Delay Equivalences in Tuning PID Control for the Double Integrator Plus Dead-Time. Mathematics 2021, 9, 328. [Google Scholar] [CrossRef]
- Viteckova, M.; Vitecek, A.; Janacova, D. Time transformation and robustness of PI controller tuning for integrating plants with time delay. In Proceedings of the 30th International Conference on Cybernetics and Informatics, Velké Karlovice, Czech Republic, 29 January–1 February 2020. [Google Scholar]
- Viteckova, M.; Vitecek, A. Robust Tuning of PI and PID Controllers for Integrating Plants with Time Delay. In Proceedings of the 22nd International Carpathian Control Conference, ICCC, Ostrava, Czech Republic, 31 May–1 June 2021. [Google Scholar]
- Glattfelder, A.; Schaufelberger, W. Control Systems with Input and Output Constraints; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Khalil, H. Nonlinear Systems, 2nd ed.; Prentice Hall Int.: London, UK, 1996. [Google Scholar]
- Föllinger, O. Nichtlineare Regelungen; R. Oldenbourg Verlag: München, Germany, 1993. [Google Scholar]
- Haddad, W.M.; Chellaboina, V. Nonlinear Dynamical Systems and Control: A Lyapunov-Based Approach; Princeton University Press: Princeton, NJ, USA, 2011. [Google Scholar]
- Lima, T.A. Contributions to the Control of Input-Saturated Systems: Time Delay and Allocation Function Cases; Universidade Federal Do Ceará: Fortaleza, Brazil, 2021. [Google Scholar]
- Popov, V. On the absolute stability of nonlinear control systems. Avtom. Telemekh. 1961, 22, 961–979. [Google Scholar]
- Vítečková, M.; Víteček, A. 2DOF PID controller tuning for integrating plants. In Proceedings of the 2016 17th International Carpathian Control Conference (ICCC), High Tatras, Slovakia, 29 May–1 June 2016; pp. 793–797. [Google Scholar]
- Arrieta, O.; Vilanova, R. Simple PID Tuning Rules with Guaranteed Ms Robustness Achievement. IFAC Proc. Vol. 2011, 44, 12042–12047. [Google Scholar] [CrossRef]
- Alcántara, S.; Zhang, W.; Pedret, C.; Vilanova, R.; Skogestad, S. IMC-like analytical design with S/SP mixed sensitivity consideration: Utility in PID tuning guidance. J. Process. Control. 2011, 21, 976–985. [Google Scholar] [CrossRef]
- Alcántara, S.; Vilanova, R.; Pedret, C.; Skogestad, S. A look into robustness/performance and servo/regulation issues in PI tuning. IFAC Proc. Vol. 2012, 45, 181–186. [Google Scholar] [CrossRef]
- Grimholt, C.; Skogestad, S. Optimal PI-Control and Verifcation of the SIMC Tuning Rule. IFAC Proc. Vol. 2012, 45, 11–22. [Google Scholar]
- Jin, Q.; Liu, Q. Analytical IMC-PID design in terms of performance/robustness tradeoff for integrating processes: From 2-Dof to 1-Dof. J. Process. Control. 2014, 24, 22–32. [Google Scholar] [CrossRef]
- Bennett, S. Development of the PID controller. Control. Syst. IEEE 1993, 13, 58–62. [Google Scholar]
- Skogestad, S. Probably the best simple PID tuning rules in the world. In Proceedings of the AIChE Annual Meeting, Reno, NV, USA, 4–9 November 2001. [Google Scholar]
- Åström, K.J.; Panagopoulos, H.; Hägglund, T. Design of PI Controllers based on Non-Convex Optimization. Automatica 1998, 34, 585–601. [Google Scholar] [CrossRef]
- Ziegler, J.G.; Nichols, N.B. Optimum settings for automatic controllers. Trans. ASME 1942, 64, 759–768. [Google Scholar] [CrossRef]
- Athans, M.; Fabl, P. Optimal Control; McGraw-Hill: New York, NY, USA, 1966. [Google Scholar]
- Smith, O. Feedback Control Systems; McGraw-Hill: New York, NY, USA, 1958. [Google Scholar]
- Jemeljanov, S. Teorija Sistem s Preremennoj Strukturoj; Nauka Moskva: Moskow, Russia, 1970. [Google Scholar]
- Gao, Z. On the centrality of disturbance rejection in automatic control. ISA Trans. 2014, 53, 850–857. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Gao, Z.; Li, D.; Chen, Y.; Liu, Y. On transitioning from PID to ADRC in thermal power plants. Control. Theory Technol. 2021, 19, 3–18. [Google Scholar] [CrossRef]
- Lin, P.; Wu, Z.; Fei, Z.; Sun, X.M. A Generalized PID Interpretation for High-Order LADRC and Cascade LADRC for Servo Systems. IEEE Trans. Ind. Electron. 2022, 69, 5207–5214. [Google Scholar] [CrossRef]
- Sun, Y.; Su, Z.G.; Sun, L.; Zhao, G. Time-Delay Active Disturbance Rejection Control of Wet Electrostatic Precipitator in Power Plants. IEEE Trans. Autom. Sci. Eng. 2022, 20, 2748–2760. [Google Scholar] [CrossRef]
- Wang, R.; Li, X.; Zhang, J.; Zhang, J.; Li, W.; Liu, Y.; Fu, W.; Ma, X. Speed Control for a Marine Diesel Engine Based on the Combined Linear-Nonlinear Active Disturbance Rejection Control. Math. Probl. Eng. 2018, 2018, 7641862. [Google Scholar] [CrossRef]
- Fliess, M.; Join, C. An alternative to proportional-integral and proportional-integral-derivative regulators: Intelligent proportional-derivative regulators. Int. J. Robust Nonlinear Control. 2021, 32, 9512–9524. [Google Scholar] [CrossRef]
- Young, K.; Utkin, V.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control. Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Sabanovic, A. Variable Structure Systems With Sliding Modes in Motion Control—A Survey. IEEE Trans. Ind. Inf. 2011, 7, 212–223. [Google Scholar] [CrossRef]
- Shao, K.; Tang, R.; Xu, F.; Wang, X.; Zheng, J. Adaptive sliding mode control for uncertain Euler-Lagrange systems with input saturation. J. Frankl. Inst. 2021, 358, 8356–8376. [Google Scholar] [CrossRef]
- Shao, K.; Zheng, J.; Tang, R.; Li, X.; Man, Z.; Liang, B. Barrier Function Based Adaptive Sliding Mode Control for Uncertain Systems With Input Saturation. IEEE/ASME Trans. Mechatronics 2022, 27, 4258–4268. [Google Scholar] [CrossRef]
- Camacho, C.; Camacho, O. A Dynamic Sliding Mode Controller Approach for Open-Loop Unstable Systems. In Proceedings of the 2022 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 9–11 November 2022; Volume 6, pp. 1–6. [Google Scholar]
- Laware, A.R.; Awaze, S.K.; Bandal, V.S.; Talange, D.B. Experimental Validation of the Non-Singular Terminal Sliding Mode Controller for a Process Control System. ECTI Trans. Electr. Eng. Electron. Commun. 2023, 21, 248553. [Google Scholar] [CrossRef]
- Yu, L.; Huang, J.; Luo, W.; Chang, S.; Sun, H.; Tian, H. Sliding-Mode Control for PMLSM Position Control—A Review. Actuators 2023, 12, 31. [Google Scholar] [CrossRef]
- Hölzl, S.L. The case for the Smith-Åström predictor. J. Process. Control. 2023, 128, 103026. [Google Scholar] [CrossRef]
- Ranjan, A.; Mehta, U. Fractional-Order Tilt Integral Derivative Controller Design Using IMC Scheme for Unstable Time-Delay Processes. J. Control Autom. Electr. Syst. 2023, 34, 907–925. [Google Scholar] [CrossRef]
- Pekar, L.; Gazdos, F. A Potential Use of the Balanced Tuning Method for the Control of a Class of Time-Delay Systems. In Proceedings of the 2019 22nd International Conference on Process Control, PC 2019, Strbske Pleso, Slovakia, 11–14 June 2019; pp. 161–166. [Google Scholar]
- Boskovic, M.C.; Sekara, T.B.; Rapaic, M.R. A New Analytical Design Method of Controllers in Modified Parallel Cascade Structure for Stable, Integrating and Unstable Industrial Primary Processes including Time Delay under Robustness Constraints. In Proceedings of the 2023 22nd International Symposium INFOTEH-JAHORINA (INFOTEH), East Sarajevo, Bosnia and Herzegovina, 15–17 March 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Kou, W.; Park, S.Y. A Distributed Energy Management Approach for Smart Campus Demand Response. IEEE J. Emerg. Sel. Top. Ind. Electron. 2023, 4, 339–347. [Google Scholar] [CrossRef]
- Miao, W.; Xu, B. Application of Feedforward Cascade Compound Control Based on Improved Predictive Functional Control in Heat Exchanger Outlet Temperature System. Appl. Sci. 2023, 13, 7132. [Google Scholar] [CrossRef]
- Silva, E.A.; Mozelli, L.A.; Leles, M.C.R.; Campos, V.C.S.; Palazzo, G. A study on Non-parametric Filtering in Linear and Nonlinear Control Loops using the Singular Spectrum Analysis. In Proceedings of the 2023 IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 17–20 April 2023; pp. 1–8. [Google Scholar]
- Swedan, M.B.; Abougarair, A.J.; Emhemmed, A.S. Stabilizing of Quadcopter Flight Model. In Proceedings of the 2023 IEEE 3rd International Maghreb Meeting of the Conference on Sciences and Techniques of Automatic Control and Computer Engineering (MI-STA), Benghazi, Libya, 19–21 May 2023; pp. 254–260. [Google Scholar]
- Zaki, D.; Hasanien, H.; Alharbi, M.; Ullah, Z.; Sameh, M. Hybrid Driving Training and Particle Swarm Optimization Algorithm-Based Optimal Control for Performance Improvement of Microgrids. Energies 2023, 16, 4355. [Google Scholar] [CrossRef]
- Tepljakov, A. Intelligent Control and Digital Twins for Industry 4.0. Sensors 2023, 23, 4036. [Google Scholar] [CrossRef] [PubMed]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control: Applications to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- De Keyser, R. Model Based Predictive Control for Linear Systems. In Control Systems, Robotics and Automation; Unbehauen, H., Ed.; Eolss Publishers: Oxford, UK, 2003. [Google Scholar]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contr. | PIDA | PIDA | ||||||
|---|---|---|---|---|---|---|---|---|
| 7.5825 | 7.7300 | 8.0912 | 6.7992 | 8.9700 | 7.4049 | 8.9746 | 7.4864 | |
| 0.0258 | 0.0620 | 0.0048 | 0.0297 | 0.0191 | 0.0630 | 0.0202 | 0.0661 | |
| 64.9307 | 148.6229 | 84.7714 | 97.4245 | 193.2384 | 206.3019 | 190.3595 | 203.8954 | |
| 0.4923 | 1.1489 | 0.6859 | 0.6624 | 1.7333 | 1.5276 | 1.7084 | 1.5264 | |
| 0.4079 | 1.1321 | 1.0194 | 0.2057 | 6.5164 | 1.0226 | 6.4522 | 1.1275 |
| Contr. | PIDA | PIDA | ||||||
|---|---|---|---|---|---|---|---|---|
| 1.5701 | 1.3409 | 1.9613 | 1.7008 | 1.6964 | 1.4748 | 1.6583 | 1.4253 | |
| 14.7998 | 10.9181 | 23.6137 | 17.5308 | 18.3922 | 12.9293 | 18.6143 | 12.0474 | |
| 0.0431 | 0.1380 | 0.0473 | 0.1763 | 0.0098 | 0.0793 | 0.0114 | 0.0746 | |
| 137.269 | 358.8607 | 36.4205 | 55.4752 | 104.4270 | 140.6965 | 106.0107 | 146.4343 | |
| 2.0316 | 3.9181 | 0.8600 | 0.9725 | 1.9206 | 1.8191 | 1.9733 | 1.7641 | |
| 0.0692 | 0.0086 | 1.9633 | 0.1521 | 0.4625 | 0.0184 | 0.5294 | 0.0094 |
| Contr. | PIDA | PIDA | ||||||
|---|---|---|---|---|---|---|---|---|
| 0.9143 | 0.8853 | 1.2911 | 1.3661 | 1.3661 | 1.3852 | 1.3852 | 1.5053 | |
| 0.0072 | 0.0045 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |
| 0.7706 | 1.4956 | 104.4903 | 247.3481 | 245.3201 | 128.4475 | 128.4475 | 390.3932 | |
| 0.7045 | 1.3241 | 134.9062 | 337.8936 | 335.1256 | 177.9287 | 177.9287 | 587.6513 | |
| 0.0000 | 0.0000 | 0.1345 | 0.5598 | 0.5552 | 0.3341 | 0.3341 | 2.3317 |
| Contr. | PIDA | PIDA | ||||||
|---|---|---|---|---|---|---|---|---|
| 0.2639 | 0.2267 | 0.3192 | 0.2922 | 0.2915 | 0.3054 | 0.3054 | 0.2598 | |
| 0.2523 | 0.2101 | 0.4002 | 0.3940 | 0.3939 | 0.3851 | 0.392 | 0.3827 | |
| 0.0057 | 0.0052 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0002 | |
| 0.6915 | 1.5711 | 97.3952 | 244.2080 | 242.4337 | 123.0300 | 124.4798 | 389.8184 | |
| 0.1744 | 0.3301 | 38.9787 | 96.2102 | 95.4964 | 47.3735 | 48.8860 | 149.1859 | |
| 0.0000 | 0.0000 | 0.0103 | 0.0220 | 0.0218 | 0.0088 | 0.0109 | 0.0263 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huba, M.; Bistak, P.; Vrancic, D. Parametrization and Optimal Tuning of Constrained Series PIDA Controller for IPDT Models. Mathematics 2023, 11, 4229. https://doi.org/10.3390/math11204229
Huba M, Bistak P, Vrancic D. Parametrization and Optimal Tuning of Constrained Series PIDA Controller for IPDT Models. Mathematics. 2023; 11(20):4229. https://doi.org/10.3390/math11204229
Chicago/Turabian StyleHuba, Mikulas, Pavol Bistak, and Damir Vrancic. 2023. "Parametrization and Optimal Tuning of Constrained Series PIDA Controller for IPDT Models" Mathematics 11, no. 20: 4229. https://doi.org/10.3390/math11204229
APA StyleHuba, M., Bistak, P., & Vrancic, D. (2023). Parametrization and Optimal Tuning of Constrained Series PIDA Controller for IPDT Models. Mathematics, 11(20), 4229. https://doi.org/10.3390/math11204229