Abstract
We studied a simple motion differential game of two pursuers and one evader in . The control functions of players are subjected to the Grönwall-type constraints. If the state of the evader coincides with the state of a pursuer, then the game is considered complete. The pursuers attempt to complete the game as earlier as possible. The evader attempts to avoid being captured or delays the capture time. We found an equation for the optimal pursuit time and construct the optimal strategies of players.
Keywords:
differential game; Grönwall constraints; pursuers; evader; optimal pursuit time; optimal strategy MSC:
91A23; 49N75
1. Introduction
Differential games with many players have received a great deal of attention in the literature (see, for more, [1,2,3,4,5,6,7,8,9,10,11]). Most of the literature considers differential games when the pursuers move faster than the evaders to complete the game. The paper [2] is devoted to the simultaneous multiple capturing of rigidly coordinated evaders by several pursuers. Moreover, there has been increasing interest in studying differential games with faster evaders (see, for example [12,13]).
Differential games of optimal approaches are difficult branches of differential games. The main problems for such differential games involve finding the value functions, to construct the optimal strategies of players. In the case of one pursuer and one evader, Isaacs [14] successfully applied the main equation of differential games—the Hamilton–Jacobi–Isaacs equation—to concrete differential games (to obtain the value function), although the existence and uniqueness of the solutions of the equation were not theoretically established yet.
Subbotin [15] established that the main equation of a differential game may not have a solution or may have infinitely many solutions. In this regard, Subbotin [15] obtained necessary and sufficient conditions for a function (to be the value function of the game) by introducing the notions of u-stability and v-stability. However, this condition contains two nonlinear partial derivative inequalities, and solving these inequalities is very difficult. Therefore, various methods were used by the researchers to find the value function for a differential game.
For example, in [16], the value function was guessed, and then it was shown that it satisfied the conditions of u-stability and v-stability [15]. Petrosyan [17] effectively used the method of the pursuit center to solve optimal pursuit problems. To prove the optimality of strategies, in the paper by Ibragimov [18], the solution of a differential game in half space was used. Another was proposed by Jang and Tomlin [19].
The algorithm proposed in [8] for the multiplayer differential game, which is based on the Apollonius circle, allows the pursuers to optimize the allocation of resources and ensures the capture of the evader for the minimum time.
The paper by Samatov et al. [20] deals with a differential game of optimal pursuit of one pursuer and one evader with the Grönwall-type constraints on the controls for players. In that paper, the optimal strategies of players were constructed and an optimal pursuit time was found.
In the present paper, we consider a differential game of the optimal pursuit of two pursuers and one evader when the control functions of players were subjected to Grönwall-type constraints. We found the optimal pursuit time in terms of reachability sets and constructed optimal strategies of players. To prove the main theorem, we considered an auxiliary differential game in a half-plane.
2. Statement of Problem
Let the dynamics of two pursuers (, ) and one evader (y) be described in by the following differential equations:
where , , and v stand for the control parameters of the i-th pursuer , , and the evader y, respectively.
Definition 1.
Measurable functions and , that satisfy the following constraints
are called admissible controls of the pursuers (, ) and evader (y), respectively, where , , σ, and k are the given positive numbers.
We let , , and denote the set of all admissible controls of the pursuers (, ) and evader (y), respectively.
The trajectories of the pursuers and the evader corresponding to admissible controls and are defined by the following equations
respectively. We need the following statement.
Lemma 1
([21]). If, for the positive numbers ρ and k,
then , where , , are measurable functions.
By Lemma 1, for the admissible controls and , we have
It should be noted that (4) does not imply (2) and (3). It is not difficult to verify that if
then Equations (2) and (3) are satisfied, respectively.
Next, we give definitions for the optimal strategies of players and optimal pursuit time.
2.1. Guaranteed Pursuit Time
Let (respectively, ) denote the ball (sphere) of radius r, centered at x, and let O be the origin.
Definition 2.
We call the function
strategy of the pursuer , if for any and for , the initial value problem (1) has a unique solution , and
In other words, the pursuer uses information about the initial states , , and the value of the control parameter at the current time t.
Definition 3.
We say that the strategies , , ensure the completion of the game for the time if, for any , we have for some and , where is the solution of the initial value problem (1) with , .
We call the number a guaranteed pursuit time corresponding to the strategies . It should be noted that any time , is also a guaranteed pursuit time corresponding to the same strategies . Let denote the greatest lower bound of the numbers corresponding to the strategies .
The pursuers attempt to minimize by choosing their strategies , and the evader attempts to maximize by choosing . If, for some strategies , of pursuers, , then , are called optimal strategies of pursuers and the number is called a guaranteed pursuit time in the game.
2.2. Guaranteed Evasion Time
Definition 4.
A continuous function
is called a strategy of the evader if, for any , , and for , the initial value problem (1) has a unique solution and along this solution
Definition 5.
We say that strategy V guarantees the evasion on the interval of time if, for any , , we have , for all and . We let denote the least upper bound of the numbers corresponding to strategy V. Moreover, we call the number a guaranteed evasion time corresponding to the strategy V.
The evader attempts to maximize the number by choosing the strategy V, and the pursuers attempt to minimize the number by choosing the controls , .
Definition 6.
If for some strategy of the evader , then is called the optimal strategy of the evader, and the number is called a guaranteed evasion time in the game. If , then this number is called the optimal pursuit time in the game.
Problem 1.
Construct the optimal strategies of the pursuers , and evader , and find the optimal pursuit time in game (1).
This is an example of a quote.
3. Main Result
Let
It is not difficult to verify that the set of all points reachable by the pursuer (respectively, by the evader y) from the point () at to the time t is the ball (respectively, ).
In this section, we prove the following main result of the paper.
Theorem 1.
A Differential Game in the Half-Plane
To prove the theorem, we consider an auxiliary differential game of one pursuer x and one evader y whose dynamics are described by the following equations:
It is assumed that . Let and let the circumferences and intersect for some . We pass a straight line perpendicular to the vector through the intersection points of these circumferences (see Figure 1). We denote the half-plane bounded by and containing the point by X. Note that the half-plane X may not contain the point . The evader must be in the half-plane X at the time and the pursuer attempts to realize the equation as early as possible.
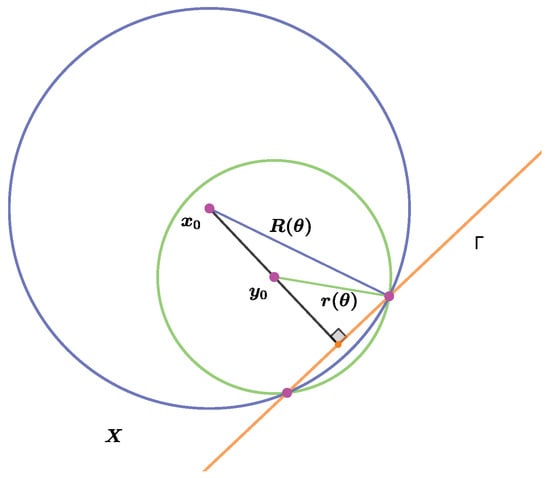
Figure 1.
Game mechanism design in the half-plane X.
Lemma 2.
If the position of the evader is , then the strategy
of the pursuer guarantees the equation at .
Proof.
Without any loss of generality, we assume that X is the upper-half-plane bounded by the x-axis. Then, clearly, . It is not difficult to show that
Moreover, for strategy (8), it can be easily verified that , and so
meaning that strategy (8) is admissible.
Next, since is perpendicular to the x-axis, , and so the strategy (8) takes the form
The condition can be written as follows
By (9) , and, hence, , . Therefore, it suffices to show that at some . To this end, we consider the following vector function , . Then
Since , then
Letting on the right-hand side of the last equation we consider the following function:
whereby (10) . For the derivative of we have
Hence, the function is decreasing and so it takes its greatest value at . Therefore, using this, we obtain from (11)
Combining this inequality with and the fact that the is continuous, we conclude that at some .
Recalling that , , which implies in particular , we obtain . Consequently, is a guaranteed pursuit time in game (8). The proof of Lemma 2 is complete. □
Next, we prove Theorem 1.
Proof.
We show first that is a guaranteed pursuit time in game (1). To this end, we let the pursuers apply the following strategies:
It can be easily verified that
and so strategies (9) are admissible.
For the time , we consider the following two cases:
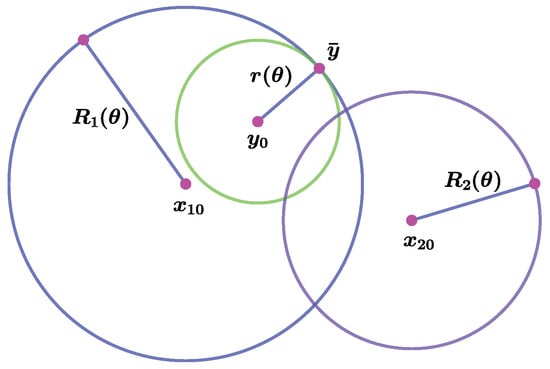
Case 1. for some (see Figure 2).
Figure 2.
Case 1: .
In this case, strategies (12) guarantee the completion of the pursuit for the time
More precisely, only the pursuer can complete the game for the time . Figure 2 illustrates Case 1, where and only the first pursuer can complete the game by the time [20].
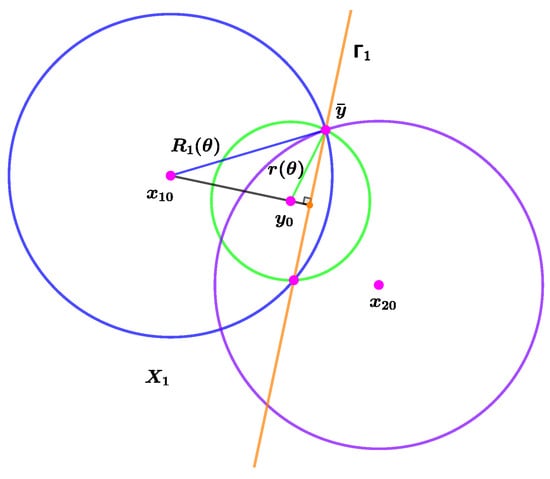
Case 2. (see Figure 3).
Figure 3.
Half space bounded by .
In Case 2, by the definition of , we have the following relation
We show that is a guaranteed pursuit time in game (1). It can be shown that, for some , we have and , . We pass straight lines from the point perpendicular to vectors , . We denote the half-plane bounded by the straight line that contains the point by , .
One can show similar to Assertion 4 (Appendix, [22]) that . Combining this inclusion with the inclusion , we have either or . If , then by Lemma 2, we obtain at some ; if , then by Lemma 2 at some . This observation shows that is a guaranteed pursuit time in game (1).
Next, we show that is a guaranteed evasion time in game (1) in both Cases 1 and 2. We let the evader apply the following strategy
where is defined as above in Case 2, and in Case 1. Strategy (15) is admissible. Indeed, since
and so it satisfies condition (3). Moreover, since , we have
where the evader reaches the point at the time .
What is left is to show that for all and . The following reasoning works for the definitions of in both Cases 1 and 2. We assume the contrary, let at and . For definiteness, we assume that ; that is, . Then using the equation , we have
This means belongs to the interior of the ball , and so for some . This contradicts condition (14). Hence, for all and , meaning that is a guaranteed evasion time. Thus, is the optimal pursuit time. The proof of the theorem is complete. □
4. Conclusions
We studied a simple motion differential game of two pursuers and one evader in . The control functions of players are subjected to the Grönwall-type constraints. We found an equation for the optimal pursuit time and constructed the optimal strategies of players. The optimal strategies of pursuers are defined by Equation (12) and the optimal strategy of the evader is defined by (15). The optimal strategy of the evader (15) satisfies the equation . Moreover, according to the Grönwall-type constraint (3), we have . Therefore, we can say that the evader moves at its maximal speed. The equation and (12) imply that , , meaning that the pursuers move with maximal speed as well.
Author Contributions
Conceptualization, G.I.; Methodology, G.I.; Validation, M.F.; Formal analysis, I.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
This study did not report any date.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bakolas, E.; Tsiotras, P. On the relay pursuit of a maneuvering target by a group of pursuers. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 4270–4275. [Google Scholar]
- Blagodatskikh, A.I.; Petrov, N.N. Simultaneous Multiple Capture of Rigidly Coordinated Evaders. Dyn. Games Appl. 2019, 9, 594–613. [Google Scholar] [CrossRef]
- Ganebny, S.A.; Kumkov, S.S.; Le Ménec, S.; Patsko, V.S. Model problem in a line with two pursuers and one evader. Dyn. Games Appl. 2012, 2, 228–257. [Google Scholar] [CrossRef]
- Garcia, E.; Casbeer, D.W.; Von Moll, A.; Pachter, M. Multiple pursuer multiple evader differential games. IEEE Trans. Autom. Control. 2021, 66, 2345–2350. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, W.; Ding, J.; Stipanovic, D.M.; Tomlin, C.J. Guaranteed decentralized pursuit-evasion in the plane with multiple pursuers. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 4835–4840. [Google Scholar]
- Ibragimov, G.I.; Ferrara, M.; Ruziboev, M.; Pansera, B.A. Linear evasion differential game of one evader and several pursuers with integral constraints. Int. J. Game Theory 2021, 50, 729–750. [Google Scholar] [CrossRef]
- Ibragimov, G.I.; Ferrara, M.; Kuchkarov, A.; Pansera, B.A. Simple motion evasion differential game of many pursuers and evaders with integral constraints. Dyn. Games Appl. 2018, 8, 352–378. [Google Scholar] [CrossRef]
- Makkapati, V.R.; Tsiotras, P. Optimal evading strategies and task allocation in multi-player pursuit-evasion problems. Dyn. Games Appl. 2019, 9, 1168–1187. [Google Scholar] [CrossRef]
- Pshenichnii, B.N. Simple pursuit by several objects. Cybern. Syst. Anal. 1976, 12, 484–485. [Google Scholar] [CrossRef]
- Sun, W.; Tsiotras, P.; Lolla, T.; Subramani, D.N.; Lermusiaux, P.F.J. Multiple-pursuer/one-evader pursuit-evasion game in dynamic flowfields. JGCD 2017, 40, 1627–1637. [Google Scholar] [CrossRef]
- Von Moll, A.; Casbeer, D.; Garcia, E.; Milutinovic, D. Pursuit-evasion of an evader by multiple pursuers. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 133–142. [Google Scholar]
- Chen, J.; Zha, W.; Peng, Z.; Gu, D. Multi-player pursuit–evasion games with one superior evader. Automatica 2016, 71, 24–32. [Google Scholar] [CrossRef]
- Ramana, M.V.; Kothari, M. Pursuit-Evasion Games of High Speed Evader. J. Intell. Robot. Syst. 2017, 85, 293–306. [Google Scholar] [CrossRef]
- Isaacs, R. Differential Games; John Wiley and Sons: New York, NY, USA, 1985. [Google Scholar]
- Subbotin, A.I. Generalization of the main equation of differential game theory. J. Optim. Theory Appl. 1984, 43, 103–133. [Google Scholar] [CrossRef]
- Pashkov, A.G.; Teorekov, S.D. A game of optimal pursuit of one evader by two pursuers. Prikl. Mat. Mekh. 1983, 47, 898–903. [Google Scholar]
- Petrosjan, L.A. Differential Games of Pursuit; Series on Optimization; World Scientific Poblishing: Singapore, 1993; Volume 2. [Google Scholar]
- Ibragimov, G.I. A game of optimal pursuit of one object by several. J. Appl. Math. Mech. 1998, 62, 187–192. [Google Scholar] [CrossRef]
- Jang, J.S.; Tomlin, C.J. Control strategies in multi-player pursuit and evasion game. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; pp. 2005–6239. [Google Scholar]
- Samatov, B.T.; Ibragimov, G.I.; Khodjibayeva, I.V. Pursuit-evasion differential games with Grönwall type constraints on controls. Ural. Math. J. 2020, 6, 95–107. [Google Scholar] [CrossRef]
- Grönwall, T.H. Note on the derivatives with respect to a parameter of the solutions of a system of differential equations. Ann. Math. 1919, 20, 293–296. [Google Scholar] [CrossRef]
- Ibragimov, G.I. Optimal pursuit with countably many pursuers and one evader. Differ. Equ. 2005, 41, 627–635. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).