1. Introduction
Graph theory is a powerful mathematical framework used to model relationships and connections among objects. In many real-world applications, it is essential to understand the strength or degree of association between various elements within a graph. Saturation is a concept that plays a crucial role in quantifying this degree of connection and is particularly significant in both traditional graphs and fuzzy graphs.
In traditional graph theory, saturation refers to the level of connectivity or completeness within a graph. More formally, the saturation of a vertex in a graph is a measure of how many edges are incident upon that vertex concerning the total possible number of edges it could have. In simpler terms, it tells us how closely a particular vertex is connected to others in the graph.
1.1. Research Background and Related Work
Fuzzy graph theory extends the traditional graph theory to capture uncertainty and imprecision in relationships. In fuzzy graphs, saturation takes on a more nuanced meaning. Instead of sharp connectivity values (0 or 1), vertices in fuzzy graphs are associated with degrees of membership that represent the strength of connections.
Saturation in fuzzy graphs involves quantifying the degree to which a vertex is related to other vertices in a fuzzy and uncertain context. It allows us to express the level of association between vertices as fuzzy values, which can be continuous and gradual. This approach is particularly valuable in situations where the connections between elements are not binary but exhibit varying degrees of affinity.
Applications of saturation in fuzzy graphs can be found in fields such as decision-making, pattern recognition, image processing, and artificial intelligence, where imprecise information needs to be modelled and analyzed.
In both traditional and fuzzy graphs, the concept of saturation offers valuable insights into the structure and dynamics of networks and relationships. Whether dealing with crisp, well-defined connections in traditional graphs or handling uncertainty and fuzziness in fuzzy graphs, saturation provides a quantitative measure for characterizing the strength and extent of associations, enabling more informed decision-making and analysis in various domains.
Zadeh [
1], in 1965, discovered the ambiguity of the real-life situation and the phenomenon of uncertainty and introduced a fuzzy set that changed how science and technology were portrayed. Zhang [
2] explained the bipolar fuzzy set idea as well as presented the possibility of bipolar fuzzy sets in different environmental analyses [
3]. First, Kaufman [
4] studied the fuzzy graph concept. After that, Rosenfeld [
5] supplied the possibility of nodes and edges along with several theoretical ideas such as paths, connectedness, cycle, etc., in fuzziness. Different concepts are presented after that on fuzzy graphs [
6]. Several definitions and real-life applications have been studied in [
7]. Some new concepts of the fuzzy graph and their generalization are also discussed by Mordeson and Mathew [
8]. Nair and Cheng [
9] provided fuzzy graphs with fuzzy cliques. Saturation on the fuzzy graph is presented first by Mathew et al. [
10]. Chen et al. [
11] first presented
mPFG. Later on, Ghorai and Pal [
12] first introduced density on
mPFG. Akram et al. [
13,
14] studied on a few edge properties of
mPFG. Next, Mahapatra et al. [
15] studied fuzzy fractional colouring on fuzzy graphs. They also discussed the threshold graph on
mPF environment [
16]. They also initiated the
mPF tolerance graph [
17]. Mandal et al. [
18] studied the application of strong arcs on
mPFG. They also worked on different types of arcs on
mPFG [
19]. Subrahmanyam [
20] also introduced different types of products on
mPFG. Several works on fuzzy graphs and their generalization were developed by Nagoorgani et al. [
21,
22,
23,
24]. For more terminology on fuzzy graphs and its generalized concept, one can see [
25,
26,
27,
28,
29,
30].
1.2. Framework of This Study
This paper is structured as follows:
Section 2 describes some useful definitions in these manuscripts. In
Section 3, we have discussed the definitions of the strong node as well as strong edge (SE) count,
-node as well as
-edge count,
-node as well as
-edge count of
mPFG and give the lower and upper bound of them in an
mPFG. In
Section 3.1, we investigate node and edge counts of some well-known
mPFG. In
Section 4, we introduced saturation in
mPFG with the help of
-saturation and
-saturation.
Section 5 describes algorithms used to find
-saturated and
-saturated
mPFG. Here, we also developed saturation in
mPFG. Saturation in
mPFG has been used to resolve an application in real life based on an allocation problem, which has been given in
Section 6. Finally, a conclusion has been made in
Section 7.
1.3. Motivation of the Work
Many issues in daily life have been resolved utilising data from various sources or origins. The multi-polarity of this data collection is represented. We might not be well structured in this sort of polarity by the concepts of fuzzy models or bipolar fuzzy models. For example, we consider a graph model on social groups to explain whether the group is active or not with respect to attributes of cooperation, team spirit, awareness, controlling power, good behaviour, creativeness, etc. We need to express this situation using the 3-polar fuzzy model because these terms are inherently uncertain. A fuzzy model, an intuitionistic fuzzy model, or a bipolar fuzzy model cannot be used to deal with this problem. Thus, the m-polar fuzzy model is more suitable than any fuzzy model. The development and analysis of these kinds of mPFGs with relevant instances and theorems is also quite fascinating. The previous theories about the saturation of mPFGs are unquestionably improved by these definitions and theorems, and they are more trustworthy when it comes to resolving any challenging real-world issue. If anyone considers an example to model a location problem such that there are three components of each node and edge, where the edges MV are given depending on the following criteria: {Condition of roads, traffic jams on the roads, and the communication system between two cities}. This real-life problem can be solved with the help of saturation in mPFG.
1.4. Notations and Symbols
In this section, we revise some of the significant and practical notations that are utilised throughout the whole work to establish the theories.
Table 1 provides the abbreviated forms and their meanings.
3. Node as Well as Edge Saturation Counts of PFG
The node and edge saturation counts in mPFG are defined here and characterized also. An mPFG’s node saturation count and edge saturation count both show the proportion of SEs in the mPFG and the mPFG’s mean strong degree, respectively. Here, we consider , .
Definition 9. Suppose H is an mPFG. Then the strong node count of H is indicated by and given as .
The SE count of H is indicated by as well as given by .
Definition 10. Let H be an mPFG having UCG . Then the α-node count of H is defined as .
The α-SE count of H is given by .
Definition 11. Let H be an mPFG having UCG . Then the β-node count of H is defined as .
The β-SE count of H is given by .
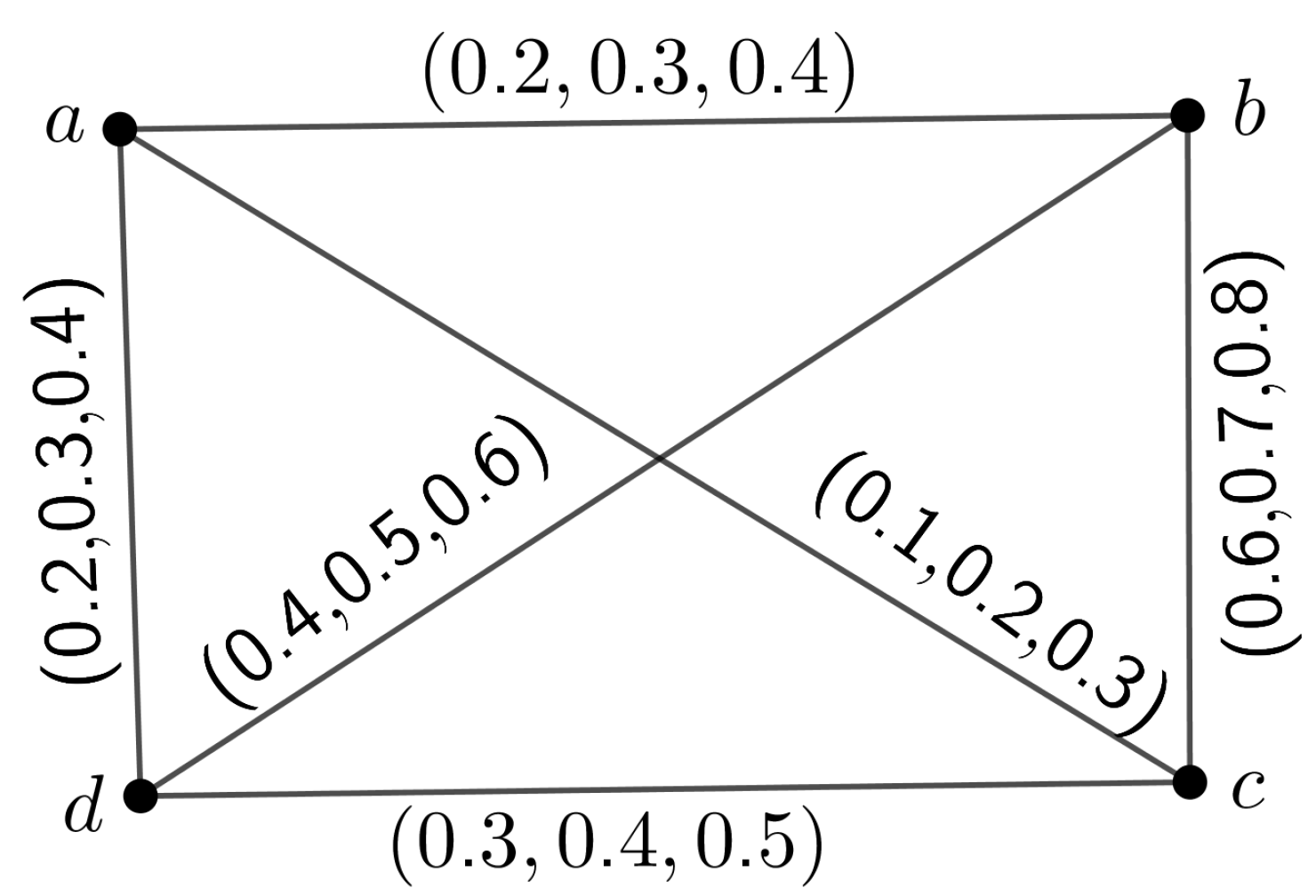
Example 1. Here, we take a 3PFG, shown in Figure 1, to depict the above definitions. Here, we take into account all crisp nodes. Here, the classified edges are given in Table 2. Strong-node count of H is and Strong-edge count of H is Every edge in a
mPF tree is
-strong, according to Theorem 3.18 of [
19]. Therefore,
and
, where
no. of nodes in a
mPF tree
G as a whole.
The number of -strong nodes never surpasses the number of nodes for any other mPFG than the mPF tree. For a complete mPFG, all possible edges can be made -strong by allotting the same MV to the nodes. Then and , .
Depending on the above observation, we can say the following:
Proposition 1. Suppose H is an mPFG where . Then
- (i)
.
- (ii)
.
- (iii)
.
- (iv)
.
- (v)
.
- (vi)
.
.
Proposition 2. Suppose H is an mPF tree. Then , .
Proof. As H is an mPF tree, therefore , and , . Hence, , . □
3.1. Vertex and Edge Counts of Some Well-Known mPFG
In this portion, we talk over saturation counts of mPFG structures such as mPF cycles, trees as well as blocks in mPFG. Some necessary parts for these structures are also obtained.
Theorem 1. Suppose H is an mPFG where . Then, the following condition is identical:
- (i)
H be an mPF tree.
- (ii)
as well as , .
- (iii)
, .
Proof. is completed previously.
Suppose that
and
,
.
Hence,
,
.
Suppose that
,
.
Since,
this shows that
,
.
Hence, H is connected and acyclic only when every edge is -strong; therefore, H is a tree. □
Theorem 2. Suppose H is a connected mPFG. H is an mPF tree iff as well as , .
Proof. Suppose
H is a connected
mPFG as well as an
mPF tree. Now, from Theorem 3.19 of [
18], we know that
H is free from
-SEs. Therefore,
and
Therefore,
and
Conversely, let and , for . Whenever H defines a cycle, then H is an mPF tree. Take C to represent a cycle in H. Hence, C must have only -strong and -SEs only. Again, consider that H does not have all -SEs. Therefore, H contains at least one -SE. Suppose e is an -SE. Then, we remove it from C. If a unique MST is found, then the condition is complete. Otherwise, we remove each -SE individually from C until we get a specific MST of H. □
Theorem 3. Let a connected mPFG H be an mPF tree iff , , where F is MST of G.
Proof. Let
H be an
mPF tree. So,
H and
F are isomorphic. Therefore,
. □
Now, we consider another case. Let
H contain a cycle
C. Then, it is not free from
-SE. Let
q be a
-SE. If
is a tree, then
and
F are isomorphic. Therefore,
If
is not a tree, then we delete the
-SEs in
in a similar way to obtain an MST
F of
H, such that
,
.
Conversely, let , , in which F corresponds to H’s MST. We have to show that H is an mPF tree. Supposing H is not an mPF tree, it must have one -SE, say . Let be another path P in H for which , and . Now, the joining of P and creates a cycle in H. Let k be the count of -SEs, which are incident at a. To find F, take out of H since it has the least weight in C. Then the count of -SEs connected to c in F is . Suppose the remaining counts of -SEs are . Hence, as well as , , which is a contrast. This contradiction leads to the theorem.
4. Saturation in -Polar Fuzzy Graph
Here, saturation in terms of the node and edge counts is presented. In this section, we also studied some of its interesting facts. We also studied saturated blocks in mPFG.
Definition 12. Suppose H is an mPFG. Then H is called α-saturate () if it must have one α-SEs incident with each node of H. H is said to be β-strong saturate if it must have one β-SE incident with each node of H.
Definition 13. Suppose H is an mPFG. H is called a saturate graph if it has at least one α-SE as well as β-SEs incident with every node of H. Otherwise, H is called an unsaturated mPFG.
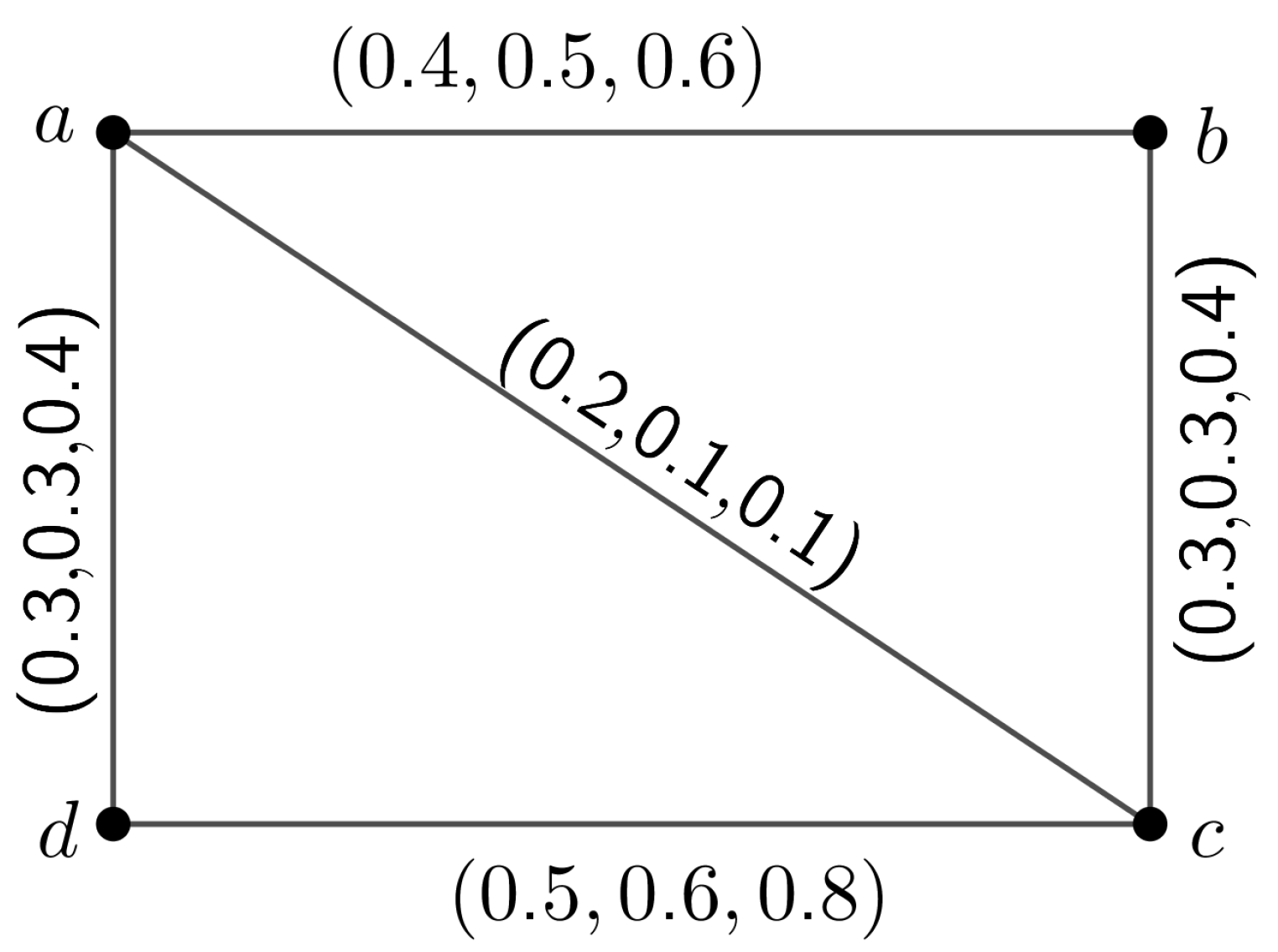
Example 2. To illustrate the above definition, we consider a 3PFG H displayed in Figure 2 whose nodes all have MV . Here, we see that the edges are α-SEs and are β-SEs. The edges are δ-SE. Each node is connected with α-SE and β-SE. Therefore, H is a saturated 3PFG.
Theorem 4. Suppose H as well as are two isomorphic mPFGs. If H is saturated, is also saturated.
Proof. Let be the isomorphism between two mPFGs. To show is saturated, we have to show that each node is connected with at least one -SE as well as -SEs. Let . Then there must be a node, say w, in H for which . Since H is saturated, therefore w is incident with at least one -SE and one -SE. Since, H and are isomorphic with each other, therefore, is also incident with at least one -SE and one -SE. Hence, is also saturated.
Let
H be an
mPFG having UCG
where
. We define a finite collection
called
-strong sequence where,
is the count of
-SEs connected to node
. We define a finite collection
called
-strong sequence where,
count of
-SEs connect at node
. Since the count of SEs of
(the count of
-SEs of
H + the count of
-SEs of
H), therefore,
□
Theorem 5. Suppose H is an mPFG having UGC where . Then H is α-saturated iff .
Proof. Suppose
H is an
-saturated
mPFG. Therefore, at least one
-SE is incident with each node of
H. Thus,
Conversely, let
. Then, all
k nodes of
H are connected with at least one
-SE. Therefore,
H is
-saturated
mPFG. □
Theorem 6. Suppose H is an mPFG where . Then H is β-saturated iff .
Proof. Similar to the above theorem. □
Theorem 7. Suppose H is an mPFG where . If H is β-saturated, then .
Proof. Let H be saturated. Therefore, each node of H is connected with at least one -SE and one -SE. Thus, . □
Theorem 8. Suppose H is an mPFG with UGC where . If
- (i)
if α-saturated.
- (ii)
if β-saturated.
- (iii)
if saturated.
.
Proof. (i) Let H be -S. Then every node of H is incident with at least one -SE. Therefore, H must have , -SEs. Therefore, . (ii) Similar to the above. (iii) Let H be saturated. Therefore, every node of H is connected, having a minimum of -SEs and -SEs. Therefore, the count of SEs of (the count of -SEs of H + the count of -SEs of H). Hence, . □
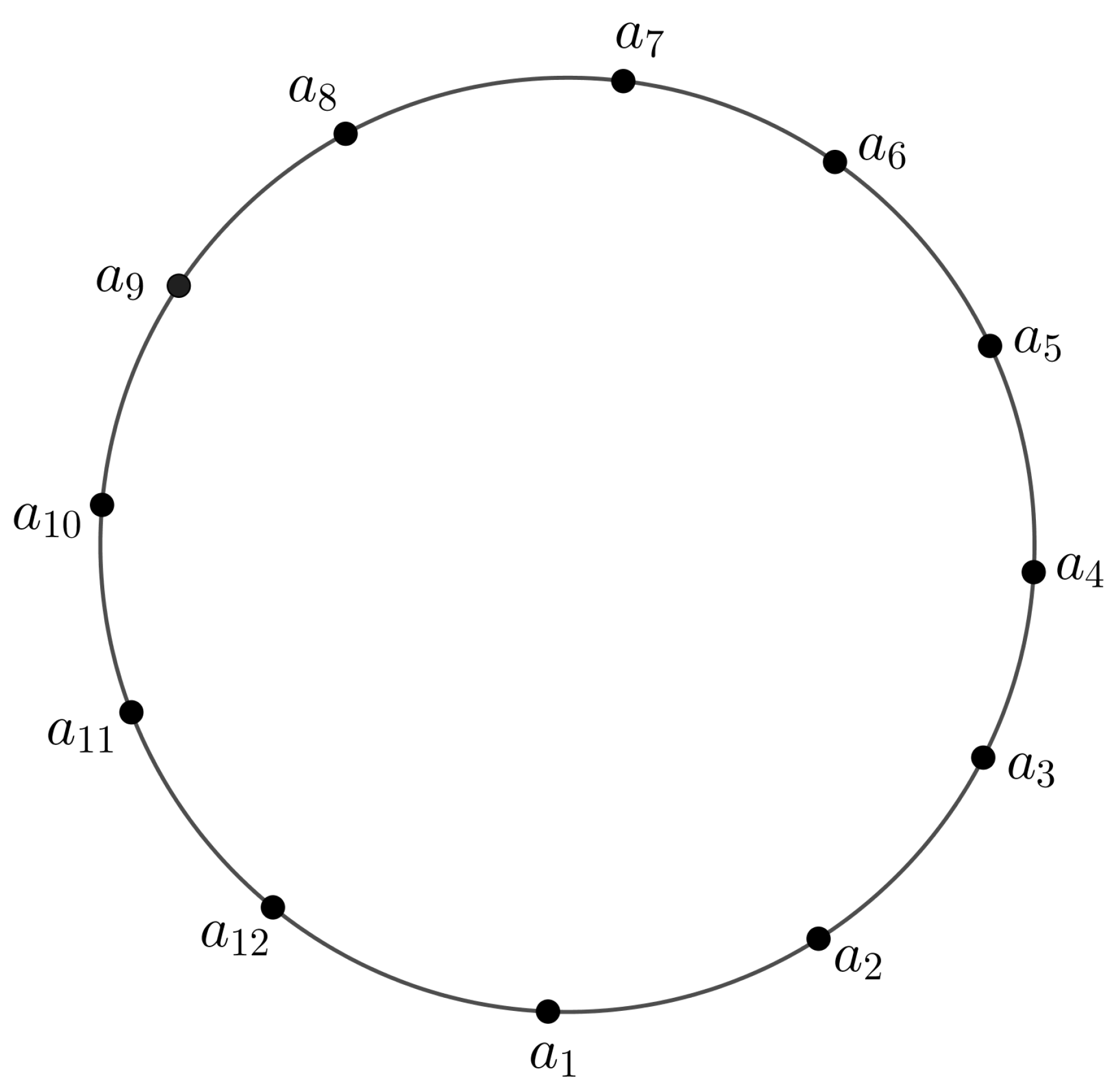
In
Figure 3, all the nodes have MV
, that is
. The edges MV are
, where
and
j is odd and
k is even. The edges MV is
, where
and
j is even and
k is odd. The edge MV between
and
is
.
In
Figure 3, we see that all the edges having MV
are
-strong and the edges having MV
are
-strong. Therefore,
Figure 3 is saturated.
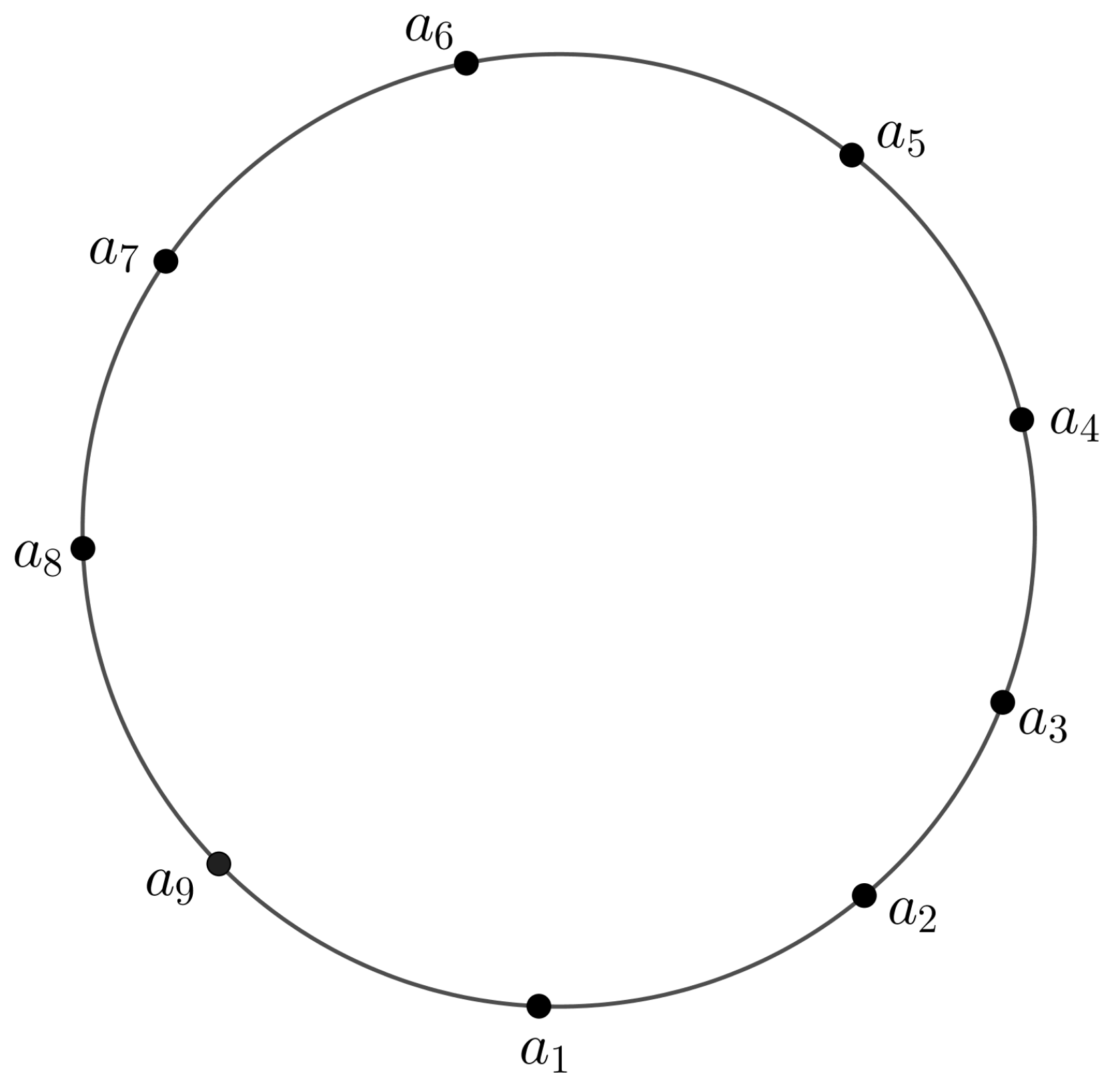
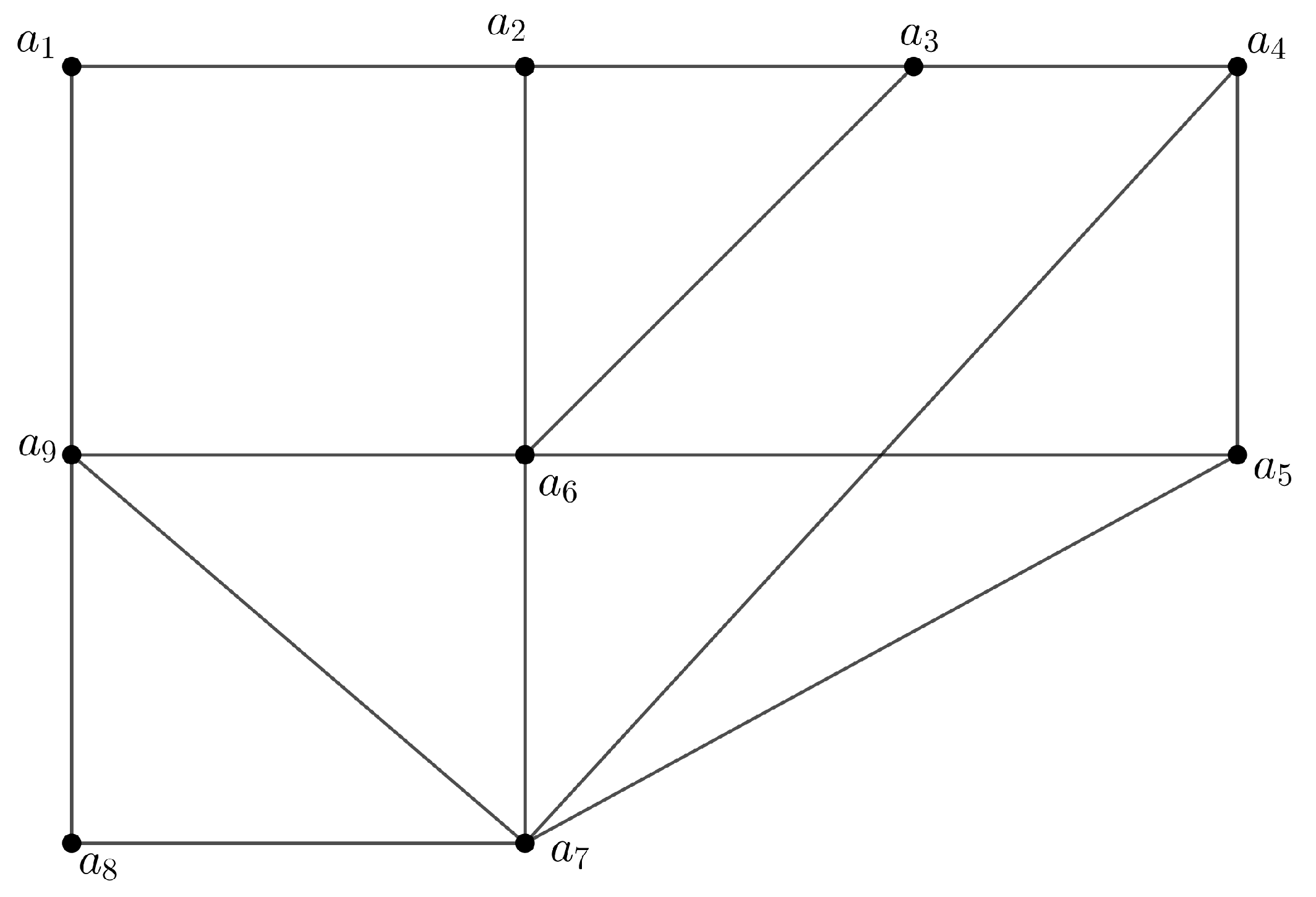
In
Figure 4, all the nodes have MV
, that is
. The edges MV is
, where
and
j is odd and
k is even. The edges MV are
, where
and
j is even and
k is odd. The edge MV between
and
is
.
In
Figure 4, we see that all the edges having MV
are
-strong and the edges having MV
are
-strong. Therefore,
Figure 4 is unsaturated as the node
connected with both the
-SEs.
One simple observation of the above discussion is that
Figure 3 has an even number of nodes while
Figure 4 has an odd number of nodes. Thus, the next hypothesis applies.
Theorem 9. Suppose is an mPF cycle. If the next two hold, it is saturated:
- (i)
, t is a positive integer.
- (ii)
α-SE as well as β-SEs occur as an alternate .
Proof. Let be an mPF cycle. Therefore, it is free from -SEs. All arcs occurring on are -SE or -SE. Let us assume that is saturated. Therefore, each node is connected with at least one -SE and one -SEs. Hence, the count of -SEs = the count of -SEs. Therefore, . Again, every node connected with both -SEs as well as -SEs happen if they occur as an alternate . □
Conversely, let be a fuzzy cycle with an even number of nodes in which each node is connected with both -SEs and -SEs alternatively. Therefore, each node is connected with precisely one -SE and -SEs. Hence, is a saturated fuzzy cycle.
Theorem 10. Suppose G is an mPF cycle. If H is saturated, it must be a block.
Proof. Since H is saturated, each node is connected with at least one -SE as well as one -SE. Again, since H is an mPF cycle, every node is connected with just two nodes. Therefore, each node contains precisely one alpha-SE and one beta-SE. Hence, removing any node from H may not decrease SC between other nodes. This shows that H is free from mPF cut node; therefore, H is a block. □
Theorem 11. Let H be an mPF cycle. If H is an mPF block, then either it is β-saturated or it is saturated.
Proof. Let a block be H. We demand that H is free from -SEs. If possible, let e be a -SE. Then the remaining edges must be -SE; therefore, G contains fuzzy cut nodes, which is an irrelevance. So, H has no -SEs. Thus, H is free from -SEs. □
If H has only -SEs as well as -SEs, they appear alternatively; otherwise, the block shape will not be found. If the count of -SEs = the count of -SEs =, then H is -saturated as well as -saturated; therefore, it is saturated. If the count of -SEs is less than the count of -SEs, then H must be only -S. For another case, when the count of -SEs is greater than the count of -SEs, this will not be true as it does not form a block. If every of arc is -strong of H, then it must be -saturated. Therefore, the theorem is proved.
Theorem 12. A complete mPFG has no δ-arcs.
Proof. Suppose
G is a complete
mPFG. Let
G have a
-arc. Let
be the
-arcs. Then we have,
□
In
G, a stronger path
P that excludes the arc
must exist. Suppose
,
and the strength of
P are
. Therefore, we have
,
. Suppose
r is the first node after
u in the path
P. Then, we have
In a similar way, let
s be the last node before
q in the path
P. Again, we also have
Since G is a complete mPFG, we therefore have , as well as . Therefore, at least one of or is , .
Therefore, will contradict if , and will contradict if , for .
Hence, we conclude the theorem.
Theorem 13. Suppose H is an mPFG. An arc is a bridge if it is α-strong.
Proof. Suppose
is an
mPF bridge. Then we have from the definition of
mPF bridge,
Again, from Theorem 3.11 of [
19], we have
From Equations and , we get , . Hence, be -SE.
Conversely, suppose is an -SE. Then, we have as the one and only strongest path in between a and c, and the removal of will decrease the SC of a and c. Therefore, is a bridge. □
Theorem 14. A complete mPFG has at most one α-SE.
Proof. We know that complete mPFG have at most one mPF bridge. Again, from Theorem 13, we have an arc that is an mPF bridge iff it is -SE. Hence, a complete mPFG has at most one -SE. □
Proposition 3. Every complete mPFG has at most or -1 β-SEs.
Theorem 15. If H is a complete mPFG having w nodes, then few disparities hold.
- (i)
.
- (ii)
.
.
Proof. With the help of Theorem 14, we conclude that H can have at most one -SE. Hence, we have , . Again, clearly , . Therefore, , .
Again, from Proposition 3, we are aware that the minimal number of
-SEs is
−1. Therefore,
Thus,
,
.
Next, we will try to find out the upper limit of the -node count for a block in mPFG. □
Theorem 16. If H is an mPF block, we have , .
Proof. To prove this, we first try to determine the maximum count of -SEs of H. Let . We know that if more than one -SEs are connected with a common node, then the node is a mPF cut node. Since H is an mPF block, it therefore has no mPF cut node. Therefore, the maximum count of -SEs of H is . Thus, , . □
Theorem 17. An mPF block H is α-saturated then , .
Proof. Let H be -saturated. Since H is an mPF block, it therefore has no mPF cut node. Hence, every node is incident with exactly unique -SE. Therefore, H contains exactly the count of -SEs. Thus, , for . □


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}