
A Numerical Approach for Dealing with Fractional Boundary Value Problems


Abstract
:1. Introduction
2. Preliminaries
- The identity property, i.e.,
- The power rule property, i.e.,
- The commutation property, i.e.,
- The power rule property, i.e.,
- The constant property, i.e.,where c is constant.
- Interpolation property, i.e.,
- Linearity property, i.e.,where and are two constants.
- Non-commutation property, i.e.,where n such that .
3. Methodology and Stability
3.1. Approximating Caputo Differentiator of Order
3.2. Analysis of the Method
3.3. Stability of the Method
4. Numerical Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aydemir, K.; Olǧar, H.; Mukhtarov, O.S.; Muhtarov, F.S. Differential Operator Equations with Interface Conditions in Modified Direct Sum Spaces. Filomat 2018, 32, 921–931. [Google Scholar] [CrossRef]
- Bezziou, M.; Dahmani, Z.; Jebril, I.; Belhamiti, M.M. Solvability for a Differential System of Duffing Type Via Caputo-Hadamard Approach. Appl. Math. Inf. Sci. 2022, 16, 341–352. [Google Scholar]
- Abu-Zaid, I.T.; El-Gebeily, M.A. A finite-difference method for the spectral approximation of a class of singular two-point boundary value problems. IMA J. Numer. Anal. 1994, 14, 545–562. [Google Scholar] [CrossRef]
- Fulton, C.T. Two-point boundary value problems with eigenvalue parameter contained in the boundary conditions. Proc. Roy. Soc. Edinb. 1977, 77A, 293–308. [Google Scholar] [CrossRef]
- Mukhtarov, O.; Olǧar, H.; Aydemir, K. Resolvent Operator and Spectrum of New Type Boundary Value Problems. Filomat 2015, 29, 1671–1680. [Google Scholar] [CrossRef]
- Keller, H.B. Numerical Methods for Two-Point Boundary-Value Problems; Courier Dover Publications: Mineola, NY, USA, 2018. [Google Scholar]
- Endeshaw, B. Finite Difference Method for Boundary Value Problems in Ordinary Differential Equations. Math. Theory Model. 2019, 9, 17–27. [Google Scholar]
- Zhang, T.; Li, Y. Exponential Euler scheme of multi-delay Caputo–Fabrizio fractional-order differential equations. Appl. Math. Lett. 2022, 124, 107709. [Google Scholar] [CrossRef]
- Albadarneh, R.B.; Batiha, I.M.; Zurigat, M. Numerical solutions for linear fractional differential equations of order 1 < α < 2 using finite difference method (FFDM). Int. J. Math. Comput. Sci. 2016, 16, 103–111. [Google Scholar]
- Albadarneh, R.B.; Zerqat, M.; Batiha, I.M. Numerical solutions for linear and non-linear fractional differential equations. Int. J. Pure Appl. Math. 2016, 106, 859–871. [Google Scholar] [CrossRef]
- Batiha, I.M.; Alshorm, S.; Ouannas, A.; Momani, S.; Ababneh, O.Y.; Albdareen, M. Modified Three-Point Fractional Formulas with Richardson Extrapolation. Mathematics 2022, 10, 3489. [Google Scholar] [CrossRef]
- Kilbas, A.A. Theory and Application of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Mainardi, F. Fractional Calculus. In Fractals and Fractional Calculus in Continuum Mechanics; Springer: Berlin, Germany, 1997; pp. 291–348. [Google Scholar]
- Odibat, Z.M.; Momani, S. An algorithm for the numerical solution of differential equations of fractional order. J. Appl. Math. Inform. 2008, 26, 15–27. [Google Scholar]
- Bittelli; Marco; Campbell, G.S.; Tomei, F. Soil Physics with Python: Transport in the Soil–Plant–Atmosphere System; Oxford Academic: Oxford, UK, 2015. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
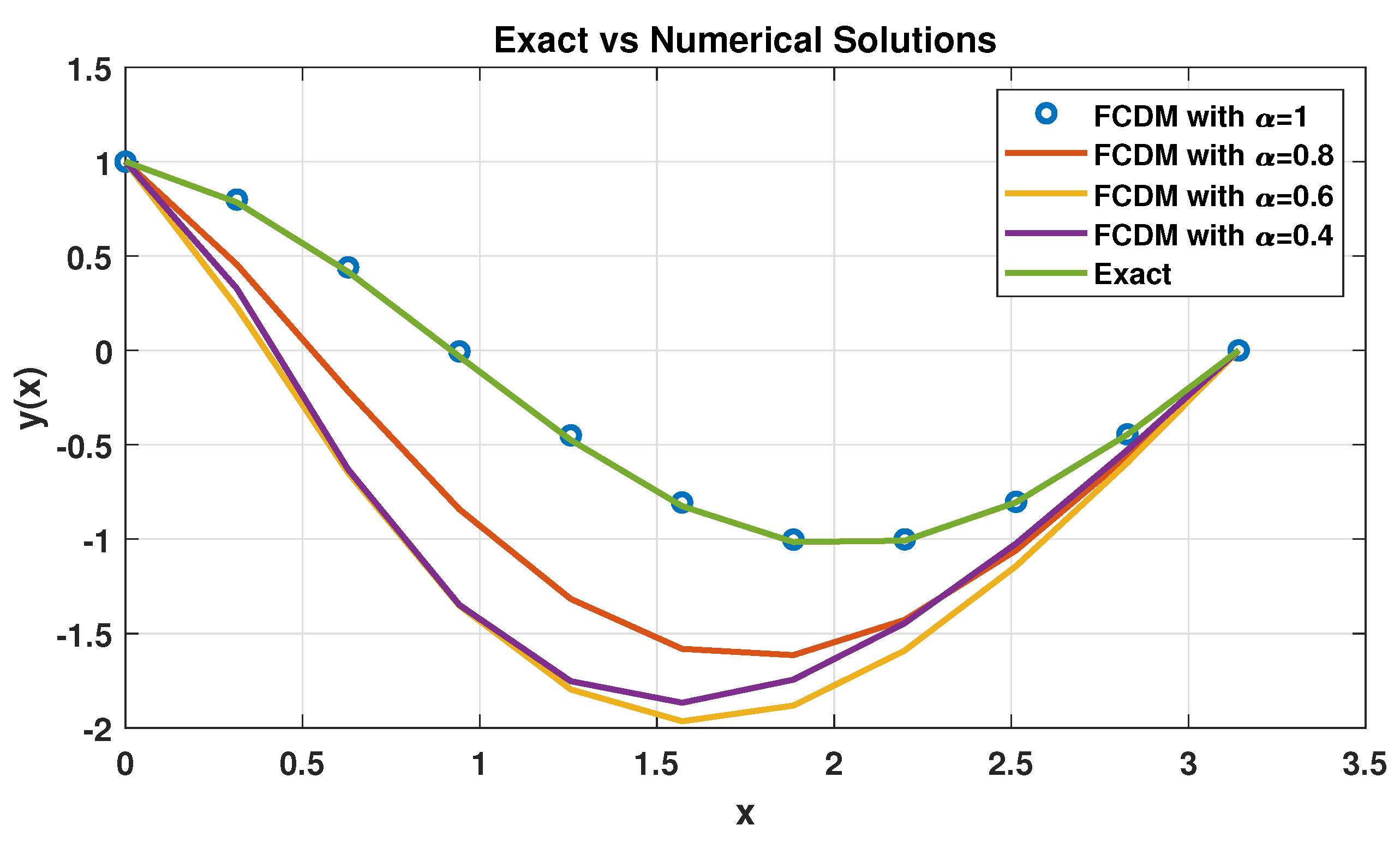
| x | Exact Solution | ||||
|---|---|---|---|---|---|
| 0 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 |
| 0.1 | 0.3280 | 0.2289 | 0.4551 | 0.7989 | 0.7842 |
| 0.2 | −0.6303 | −0.6484 | −0.2165 | 0.4401 | 0.4161 |
| 0.3 | −1.3491 | −1.3529 | −0.8424 | −0.0056 | −0.0328 |
| 0.4 | −1.7529 | −1.7965 | −1.3172 | −0.4501 | −0.4753 |
| 0.5 | −1.8669 | −1.9651 | −1.5815 | −0.8058 | −0.8255 |
| 0.6 | −1.7447 | −1.8819 | −1.6146 | −1.0025 | −1.0154 |
| 0.7 | −1.4452 | −1.5903 | −1.4282 | −1.0013 | −1.0082 |
| 0.8 | −1.0235 | −1.1431 | −1.0593 | −0.8024 | −0.8052 |
| 0.9 | −0.5283 | −0.5954 | −0.5622 | −0.4451 | −0.4459 |
| 1.0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
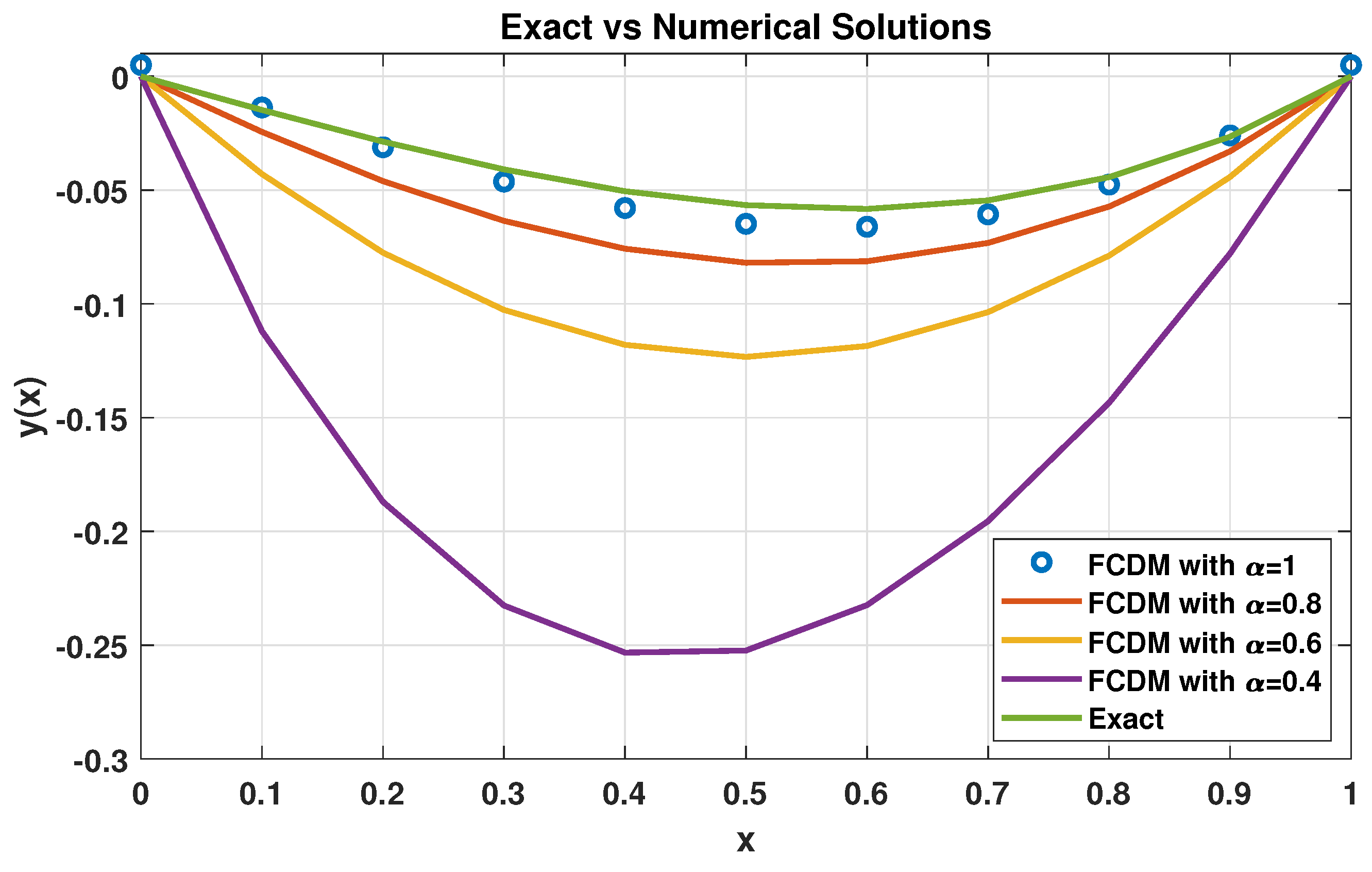
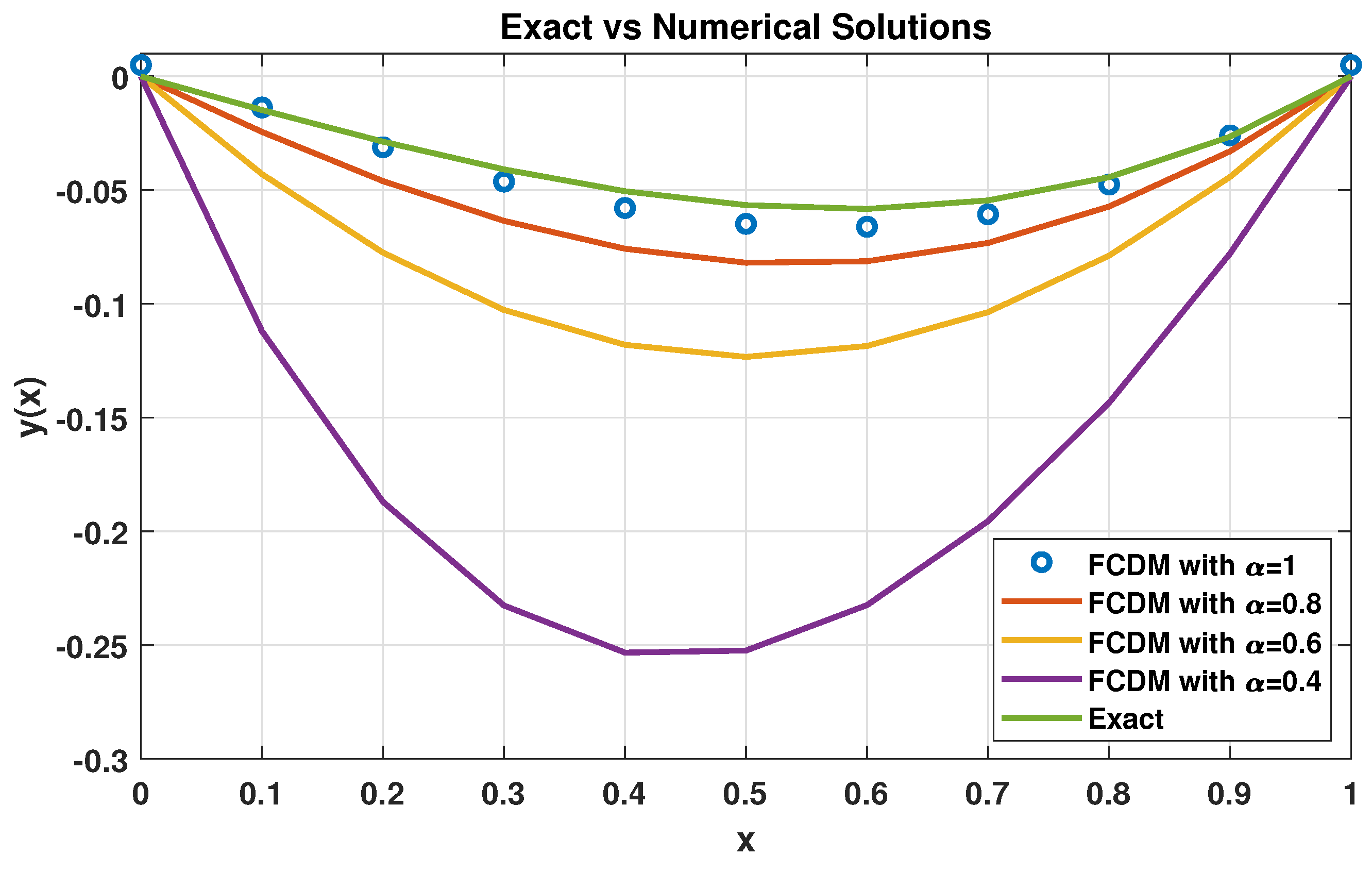
| x | Exact Solution | ||||
|---|---|---|---|---|---|
| 0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| 0.1 | −0.1120 | −0.0429 | −0.0244 | −0.0150 | −0.0148 |
| 0.2 | −0.1870 | −0.0775 | −0.0460 | −0.0299 | −0.0287 |
| 0.3 | −0.2326 | −0.1026 | −0.0635 | −0.0412 | −0.0409 |
| 0.4 | −0.2533 | −0.1180 | −0.0758 | −0.0508 | −0.0505 |
| 0.5 | −0.2524 | −0.1233 | −0.0819 | −0.0568 | −0.0566 |
| 0.6 | −0.2324 | −0.1185 | −0.0813 | −0.0589 | −0.0583 |
| 0.7 | −0.1955 | −0.1036 | −0.0732 | −0.566 | −0.0545 |
| 0.8 | −0.1435 | −0.0788 | −0.0572 | −0.0476 | −0.0443 |
| 0.9 | −0.0778 | −0.0442 | −0.0329 | −0.0269 | −0.0265 |
| 1.0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
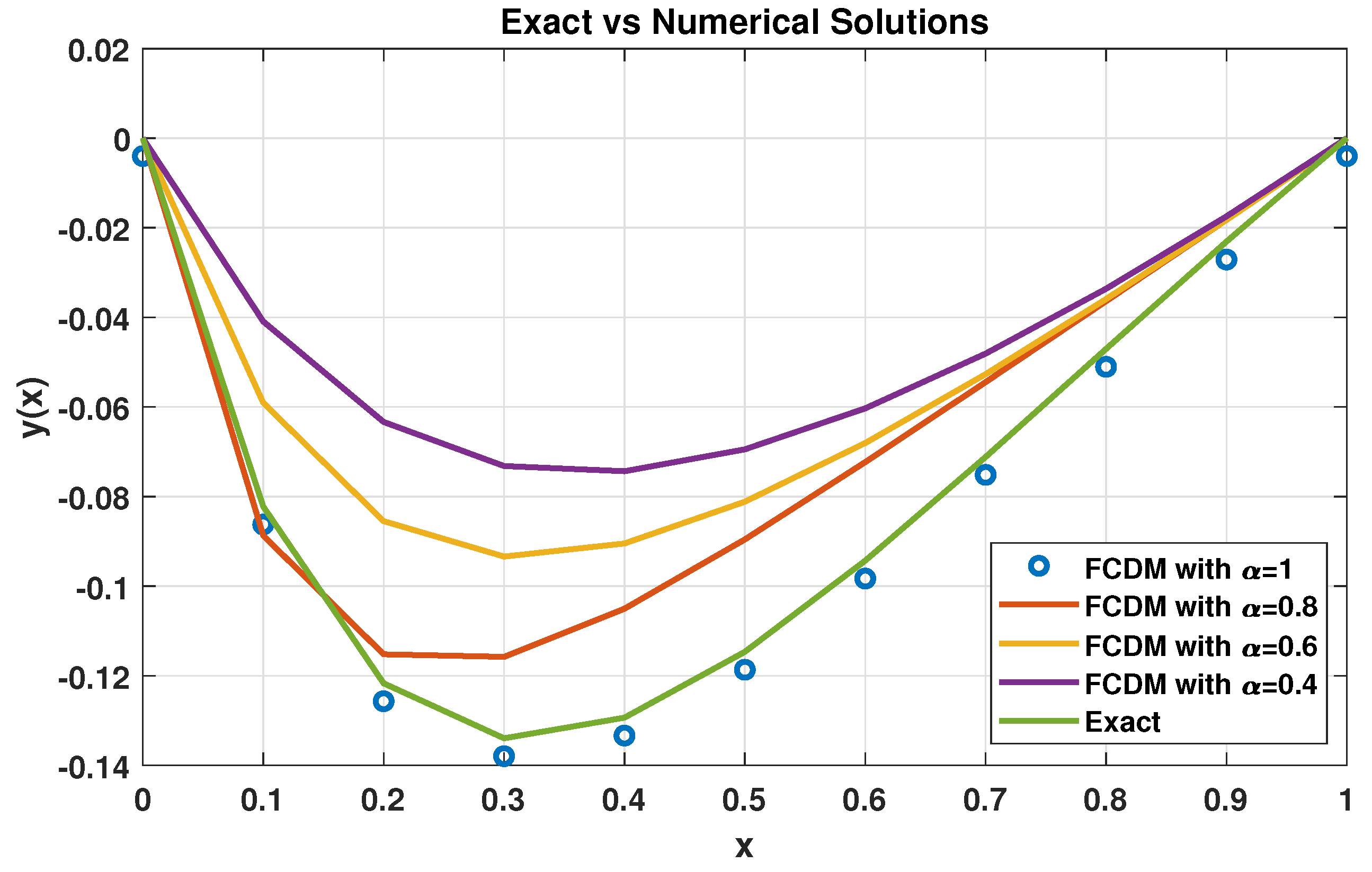
| x | Exact Solution | ||||
|---|---|---|---|---|---|
| 0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| 0.1 | −0.1365 | −0.0409 | −0.0591 | −0.0862 | −0.0822 |
| 0.2 | −0.1479 | −0.0633 | −0.0855 | −0.1257 | −0.1217 |
| 0.3 | −0.1323 | −0.0732 | −0.0934 | −0.1379 | −0.1339 |
| 0.4 | −0.1120 | −0.0743 | −0.0905 | −0.1333 | −0.1293 |
| 0.5 | −0.0919 | −0.0695 | −0.0811 | −0.1188 | −0.1146 |
| 0.6 | −0.0727 | −0.0603 | −0.0680 | −0.0981 | −0.0943 |
| 0.7 | −0.0542 | −0.0481 | −0.0527 | −0.0752 | −0.0712 |
| 0.8 | −0.0360 | −0.0336 | −0.0359 | −0.0510 | −0.0470 |
| 0.9 | −0.0180 | −0.0175 | −0.0183 | −0.0271 | −0.0231 |
| 1.0 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Nana, A.A.; Batiha, I.M.; Momani, S. A Numerical Approach for Dealing with Fractional Boundary Value Problems. Mathematics 2023, 11, 4082. https://doi.org/10.3390/math11194082
Al-Nana AA, Batiha IM, Momani S. A Numerical Approach for Dealing with Fractional Boundary Value Problems. Mathematics. 2023; 11(19):4082. https://doi.org/10.3390/math11194082
Chicago/Turabian StyleAl-Nana, Abeer A., Iqbal M. Batiha, and Shaher Momani. 2023. "A Numerical Approach for Dealing with Fractional Boundary Value Problems" Mathematics 11, no. 19: 4082. https://doi.org/10.3390/math11194082
APA StyleAl-Nana, A. A., Batiha, I. M., & Momani, S. (2023). A Numerical Approach for Dealing with Fractional Boundary Value Problems. Mathematics, 11(19), 4082. https://doi.org/10.3390/math11194082