
Intelligent Fault Diagnosis of Robotic Strain Wave Gear Reducer Using Area-Metric-Based Sampling




Abstract
:
1. Introduction
2. Related Work
2.1. Fault Diagnosis Using ML and DL
2.2. Data Imbalance and Shortage
2.3. Explainable Artificial Intelligence
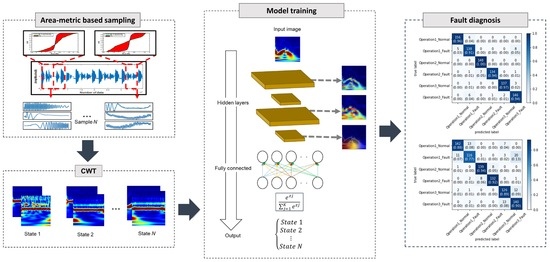
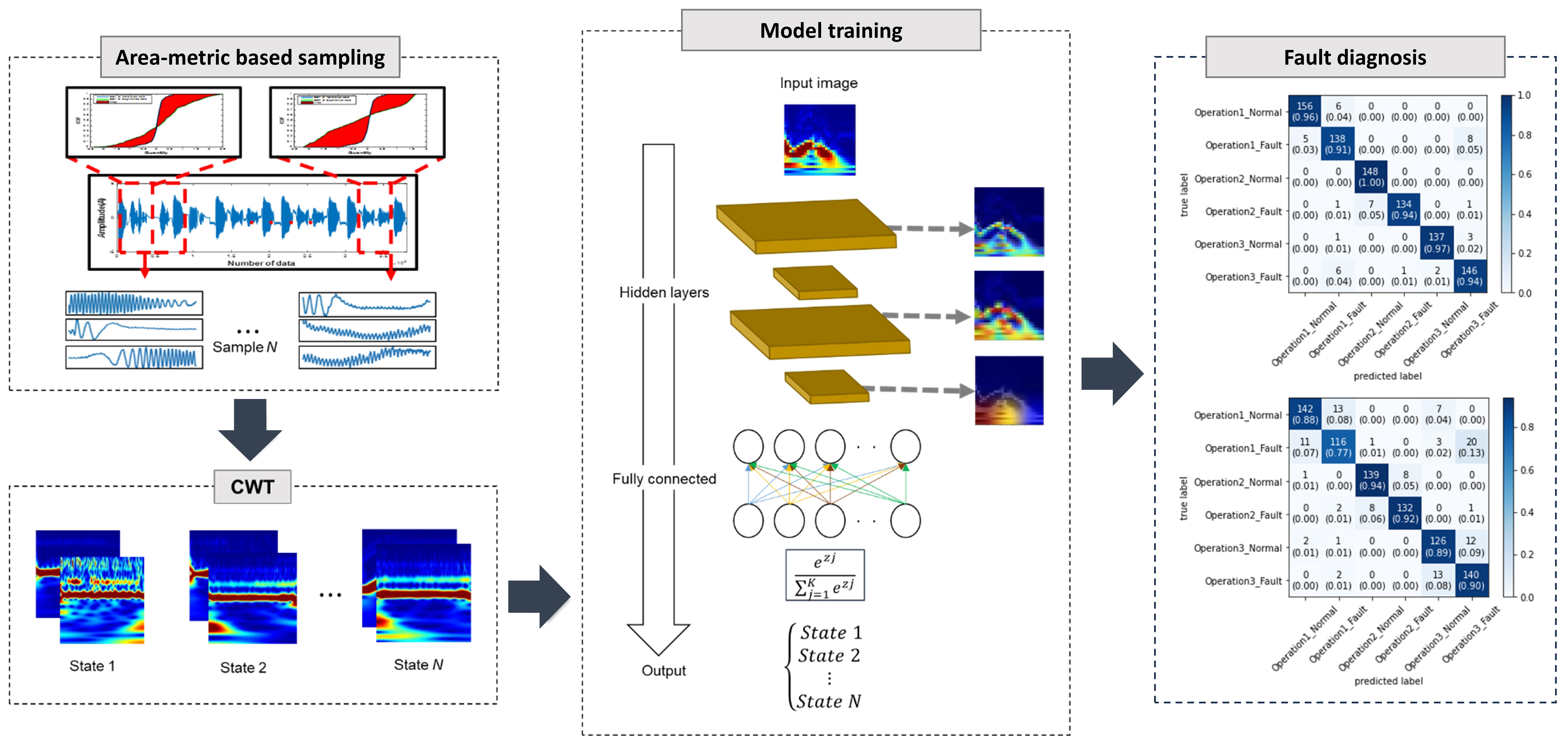
3. Proposed Methodology
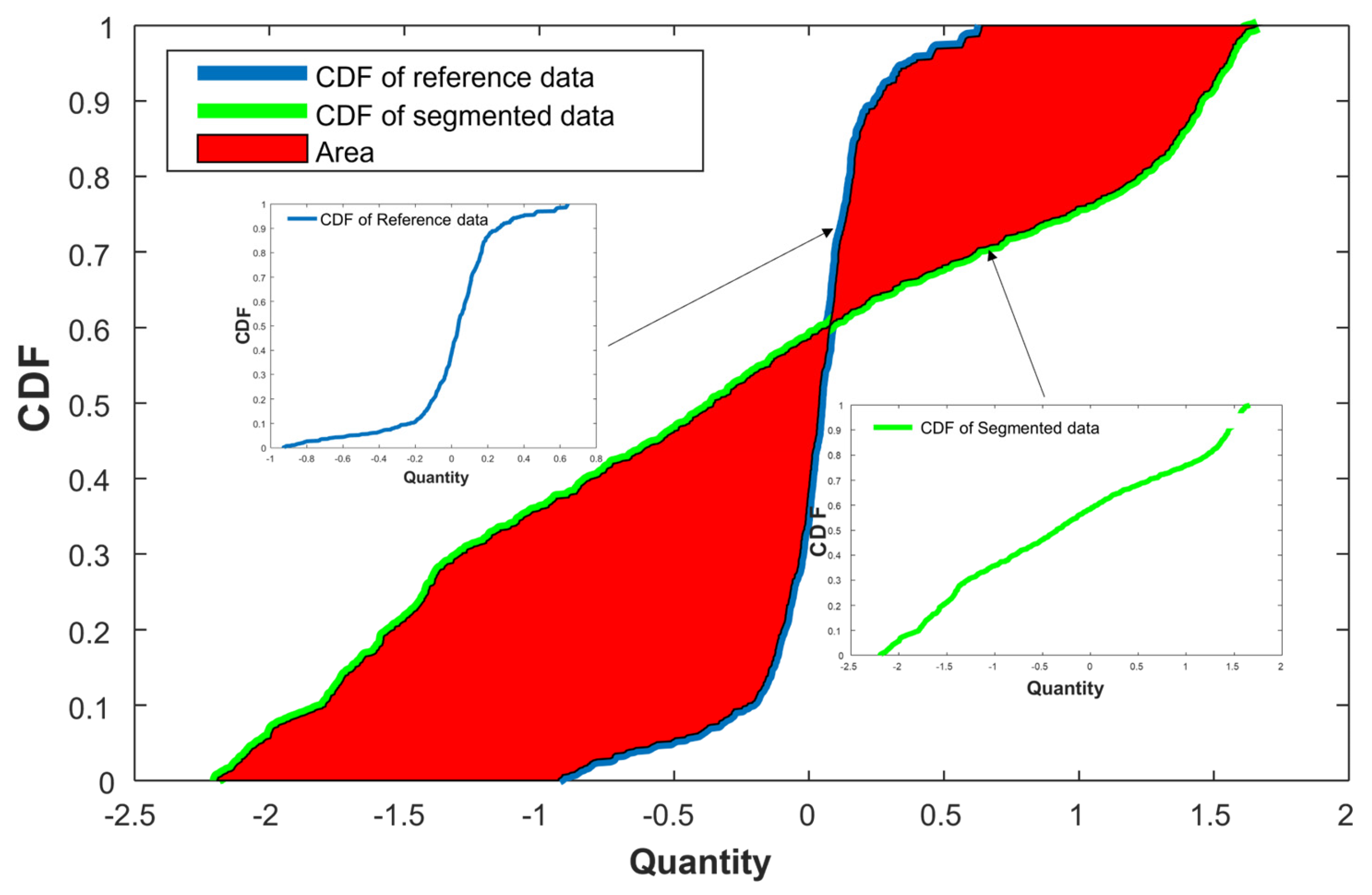
3.1. Area Metric
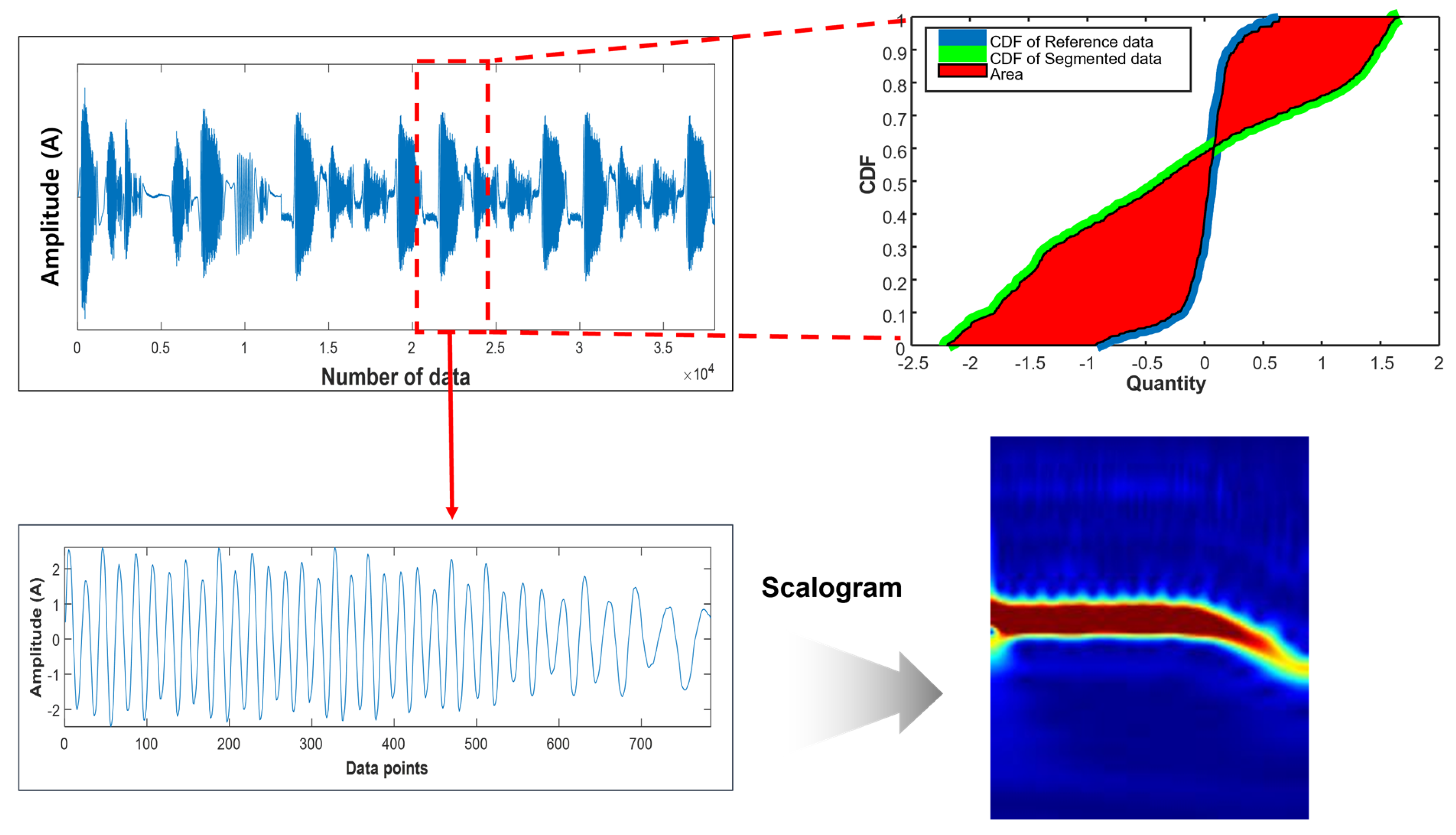
Area-Metric-Based Sampling Method
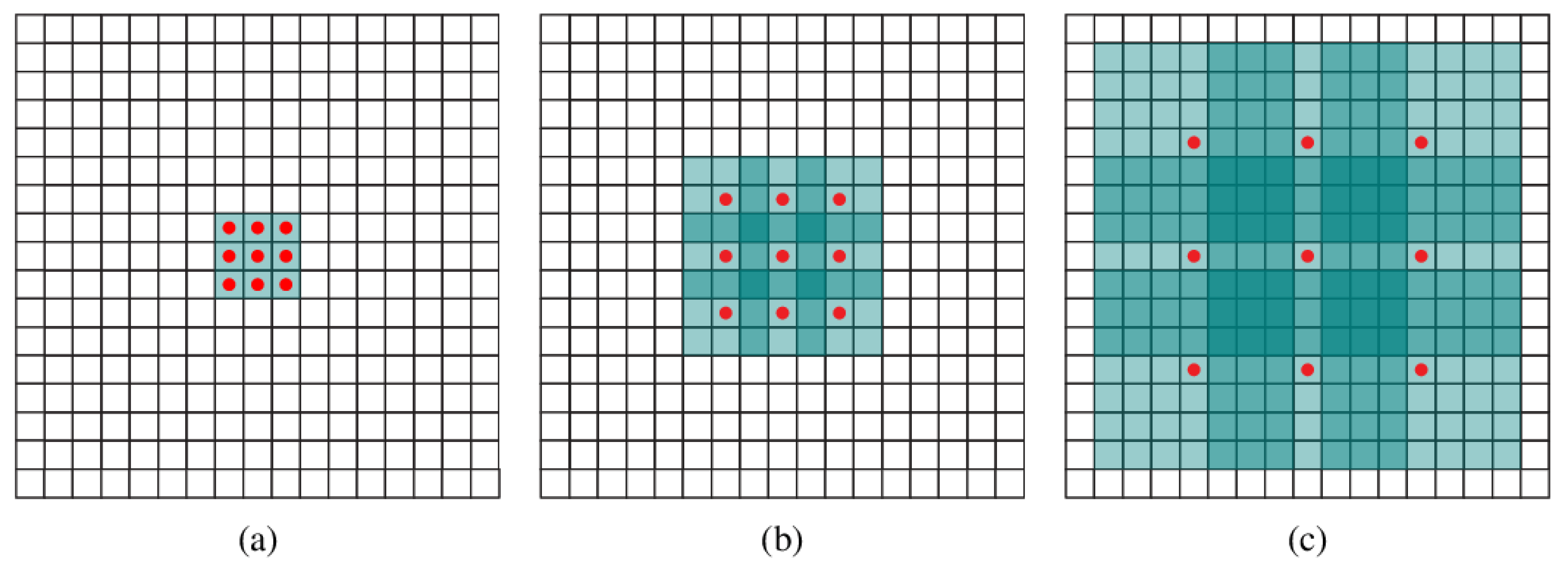
3.2. Dilated CNN
3.3. Grad-CAM
4. Case Study
4.1. Data Acquisition System
4.2. Experimental Set-Up
5. Results and Discussion
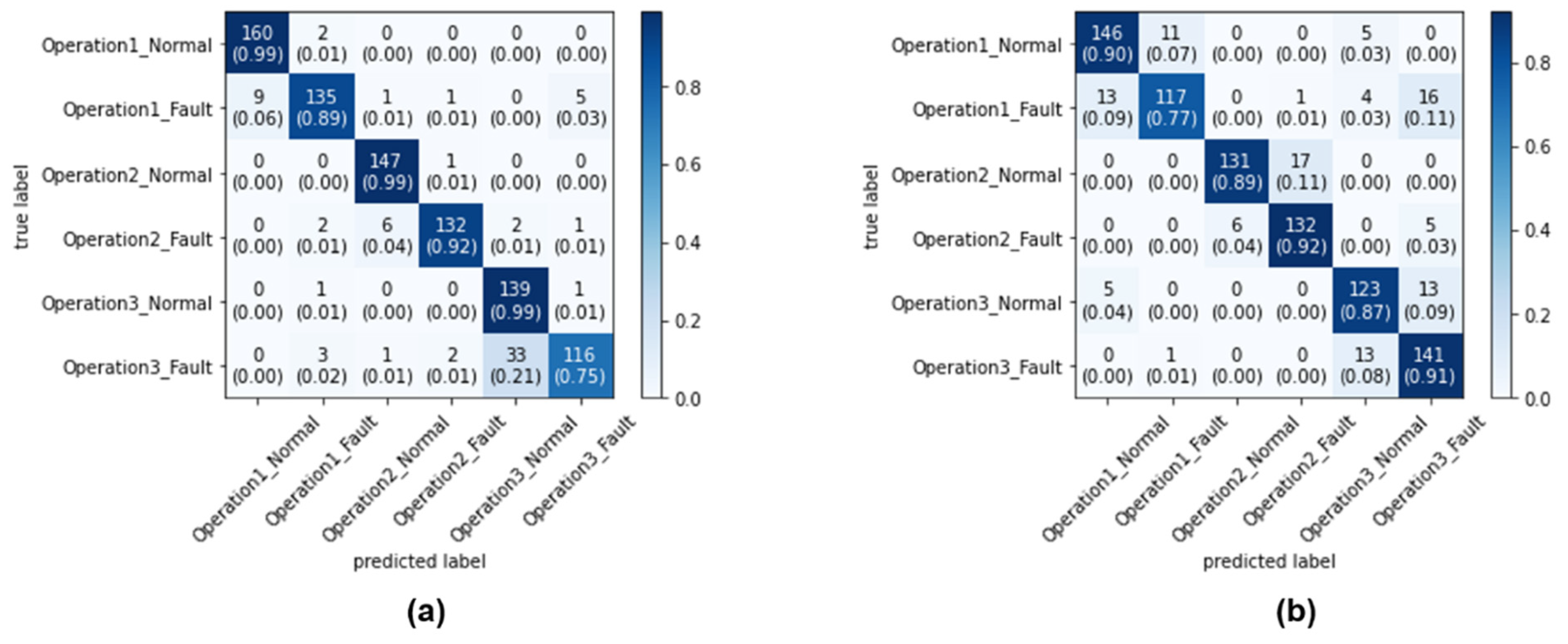
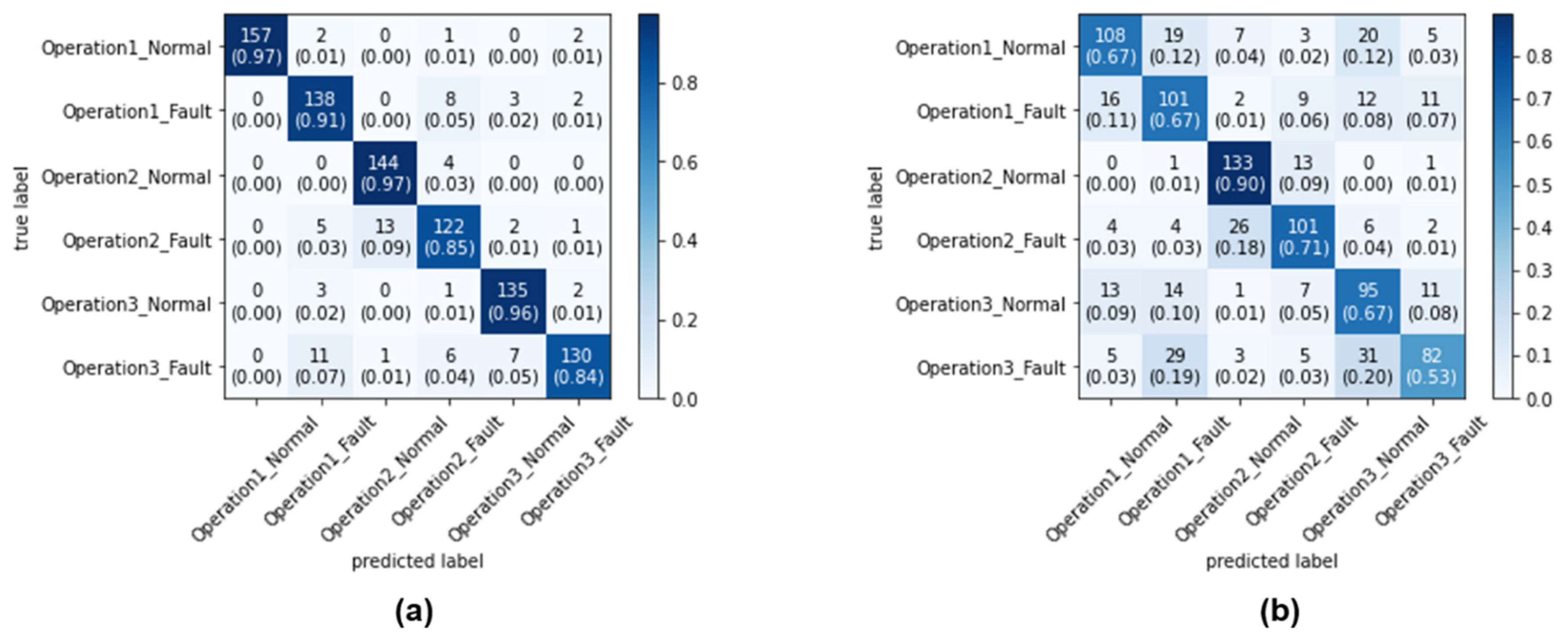
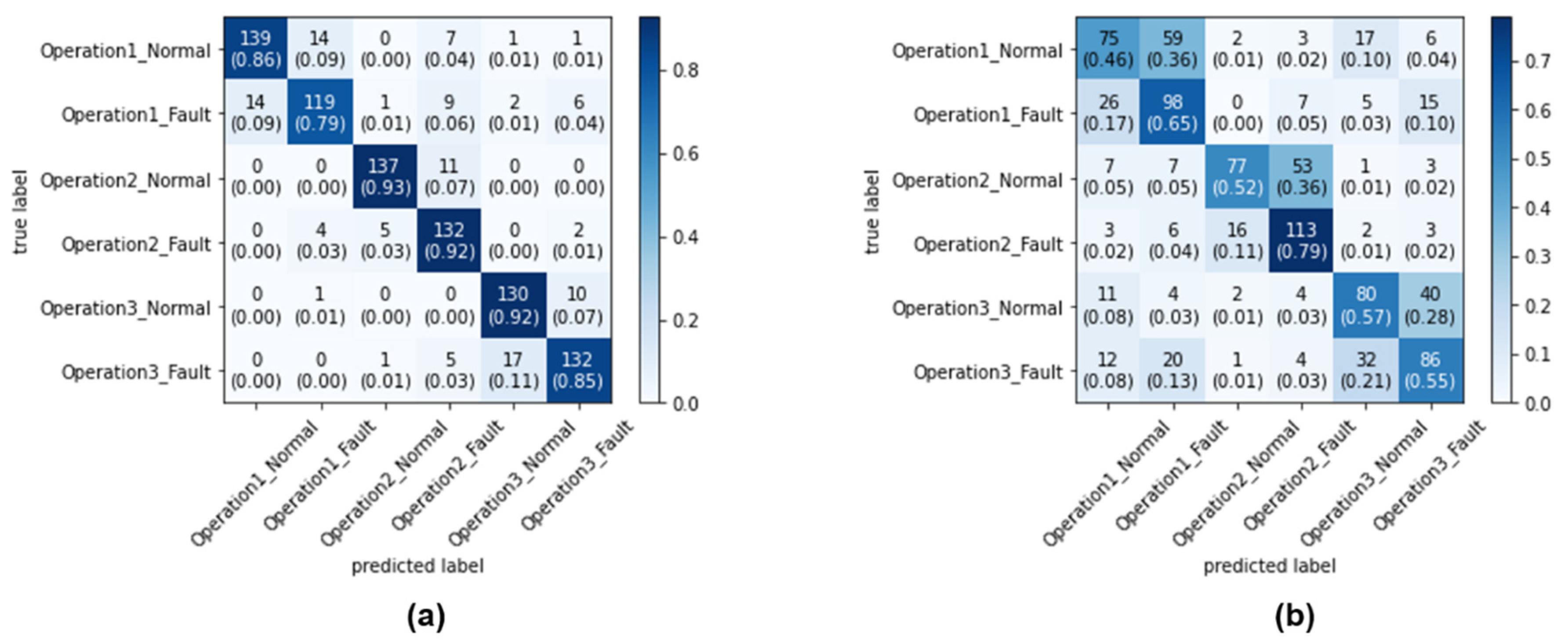
5.1. Evaluation of the Proposed Method
5.2. Presenting the Basis for Judgment: Based on Explainable Artificial Intelligence
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A Convolutional Neural Network Based Feature Learning and Fault Diagnosis Method for the Condition Monitoring of Gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Zhou, W.; Lu, B.; Habetler, T.G.; Harley, R.G. Incipient Bearing Fault Detection via Motor Stator Current Noise Cancellation Using Wiener Filter. IEEE Trans. Ind. Appl. 2009, 45, 1309–1317. [Google Scholar] [CrossRef]
- Huang, K.; Wu, S.; Li, Y.; Yang, C.; Gui, W. A Multi-Rate Sampling Data Fusion Method for Fault Diagnosis and Its Industrial Applications. J. Process Control 2021, 104, 54–61. [Google Scholar] [CrossRef]
- Kankar, P.K.; Sharma, S.C.; Harsha, S.P. Fault Diagnosis of Ball Bearings Using Machine Learning Methods. Expert Syst. Appl. 2011, 38, 1876–1886. [Google Scholar] [CrossRef]
- Samanta, S.; Bera, J.N.; Sarkar, G. KNN Based Fault Diagnosis System for Induction Motor. In Proceedings of the 2016 2nd International Conference on Control, Instrumentation, Energy & Communication (CIEC), Kolkata, India, 28–30 January 2016; pp. 304–308. [Google Scholar]
- Widodo, A.; Kim, E.Y.; Son, J.-D.; Yang, B.-S.; Tan, A.C.C.; Gu, D.-S.; Choi, B.-K.; Mathew, J. Fault Diagnosis of Low Speed Bearing Based on Relevance Vector Machine and Support Vector Machine. Expert Syst. Appl. 2009, 36, 7252–7261. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Comprehensive Review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Khan, A.; Hwang, H.; Kim, H.S. Synthetic Data Augmentation and Deep Learning for the Fault Diagnosis of Rotating Machines. Mathematics 2021, 9, 2336. [Google Scholar] [CrossRef]
- Mikołajczyk, A.; Grochowski, M. Data Augmentation for Improving Deep Learning in Image Classification Problem. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Świnouście, Poland, 9–12 May 2018; pp. 117–122. [Google Scholar]
- Wang, J.; Mall, S.; Perez, L. The Effectiveness of Data Augmentation in Image Classification Using Deep Learning. arXiv 2017, arXiv:1712.04621. [Google Scholar]
- Guennec, A.L.; Malinowski, S.; Tavenard, R. Data Augmentation for Time Series Classification Using Convolutional Neural Networks. In ECML/PKDD Workshop on Advanced Analytics and Learning on Temporal Data; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Um, T.T.; Pfister, F.M.J.; Pichler, D.; Endo, S.; Lang, M.; Hirche, S.; Fietzek, U.; Kulić, D. Data Augmentation of Wearable Sensor Data for Parkinson’s Disease Monitoring Using Convolutional Neural Networks. In Proceedings of the 19th ACM International Conference on Multimodal Interaction, Glasgow, UK, 13–17 November 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 216–220. [Google Scholar]
- Li, Y.; Hu, H.; Zhou, G. Using Data Augmentation in Continuous Authentication on Smartphones. IEEE Internet Things J. 2019, 6, 628–640. [Google Scholar] [CrossRef]
- Frid-Adar, M.; Klang, E.; Amitai, M.; Goldberger, J.; Greenspan, H. Synthetic Data Augmentation Using GAN for Improved Liver Lesion Classification. In Proceedings of the 2018 IEEE 15th International Symposium on Biomedical Imaging (ISBI 2018), Washington, DC, USA, 4–7 April 2018; pp. 289–293. [Google Scholar]
- Chen, H.-Y.; Lee, C.-H. Vibration Signals Analysis by Explainable Artificial Intelligence (XAI) Approach: Application on Bearing Faults Diagnosis. IEEE Access 2020, 8, 134246–134256. Available online: https://ieeexplore.ieee.org/abstract/document/9131692 (accessed on 2 November 2022). [CrossRef]
- Xie, T.; Huang, X.; Choi, S.-K. Intelligent Mechanical Fault Diagnosis Using Multisensor Fusion and Convolution Neural Network. IEEE Trans. Ind. Inform. 2022, 18, 3213–3223. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2020, 69, 3325–3333. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Park, S.; Song, J.; Kim, H.S.; Ryu, D. Non-Contact Detection of Delamination in Composite Laminates Coated with a Mechanoluminescent Sensor Using Convolutional AutoEncoder. Mathematics 2022, 10, 4254. [Google Scholar] [CrossRef]
- Saufi, S.R.; Ahmad, Z.A.B.; Leong, M.S.; Lim, M.H. Gearbox Fault Diagnosis Using a Deep Learning Model with Limited Data Sample. IEEE Trans. Ind. Inform. 2020, 16, 6263–6271. [Google Scholar] [CrossRef]
- Zhong, C.; Yan, K.; Dai, Y.; Jin, N.; Lou, B. Energy Efficiency Solutions for Buildings: Automated Fault Diagnosis of Air Handling Units Using Generative Adversarial Networks. Energies 2019, 12, 527. [Google Scholar] [CrossRef]
- Kumar, P.; Hati, A.S. Dilated Convolutional Neural Network Based Model for Bearing Faults and Broken Rotor Bar Detection in Squirrel Cage Induction Motors. Expert Syst. Appl. 2022, 191, 116290. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Y.; Li, S.; Li, X.; Ma, L. Gear Fault Diagnosis Based on Support Vector Machine Optimized by Artificial Bee Colony Algorithm. Mech. Mach. Theory 2015, 90, 219–229. [Google Scholar] [CrossRef]
- Qian, L.; Pan, Q.; Lv, Y.; Zhao, X. Fault Detection of Bearing by Resnet Classifier with Model-Based Data Augmentation. Machines 2022, 10, 521. [Google Scholar] [CrossRef]
- Hu, T.; Tang, T.; Lin, R.; Chen, M.; Han, S.; Wu, J. A Simple Data Augmentation Algorithm and a Self-Adaptive Convolutional Architecture for Few-Shot Fault Diagnosis under Different Working Conditions. Measurement 2020, 156, 107539. [Google Scholar] [CrossRef]
- Liu, J.; Qu, F.; Hong, X.; Zhang, H. A Small-Sample Wind Turbine Fault Detection Method with Synthetic Fault Data Using Generative Adversarial Nets. IEEE Trans. Ind. Inform. 2019, 15, 3877–3888. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, H.; Liu, C.; Yang, W.; Sun, W. Data-Augmented Wavelet Capsule Generative Adversarial Network for Rolling Bearing Fault Diagnosis. Knowl. Based Syst. 2022, 252, 109439. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, T.; Wang, Y.; Cao, Z.; Guo, Z.; Fu, H. A Novel Method for Imbalanced Fault Diagnosis of Rotating Machinery Based on Generative Adversarial Networks. IEEE Trans. Instrum. Meas. 2021, 70, 3500417. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.; Jin, Q. Imbalanced Sample Fault Diagnosis of Rotating Machinery Using Conditional Variational Auto-Encoder Generative Adversarial Network. Appl. Soft Comput. 2020, 92, 106333. [Google Scholar] [CrossRef]
- Sairam, S.; Seshadhri, S.; Marafioti, G.; Srinivasan, S.; Mathisen, G.; Bekiroglu, K. Edge-Based Explainable Fault Detection Systems for Photovoltaic Panels on Edge Nodes. Renew. Energy 2022, 185, 1425–1440. [Google Scholar] [CrossRef]
- Srinivasan, S.; Arjunan, P.; Jin, B.; Sangiovanni-Vincentelli, A.L.; Sultan, Z.; Poolla, K. Explainable AI for Chiller Fault-Detection Systems: Gaining Human Trust. Computer 2021, 54, 60–68. [Google Scholar] [CrossRef]
- Morichetta, A.; Casas, P.; Mellia, M. EXPLAIN-IT: Towards Explainable AI for Unsupervised Network Traffic Analysis. In Proceedings of the 3rd ACM CoNEXT Workshop on Big DAta, Machine Learning and Artificial Intelligence for Data Communication Networks, Orlando, FL, USA, 9 December 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 22–28. [Google Scholar]
- Shrikumar, A.; Greenside, P.; Kundaje, A. Learning Important Features Through Propagating Activation Differences. In Proceedings of the 34th International Conference on Machine Learning, Sydney, Australia, 6–11 August 2017. [Google Scholar]
- Selvaraju, R.R.; Cogswell, M.; Das, A.; Vedantam, R.; Parikh, D.; Batra, D. Grad-CAM: Visual Explanations from Deep Networks via Gradient-Based Localization. arXiv 2016, arXiv:1610.02391. [Google Scholar]
- Hwang, C.; Lee, T. E-SFD: Explainable Sensor Fault Detection in the ICS Anomaly Detection System. IEEE Access 2021, 9, 140470–140486. [Google Scholar] [CrossRef]
- Hu, J.; Zhou, Q.; McKeand, A.; Xie, T.; Choi, S.-K. A Model Validation Framework Based on Parameter Calibration under Aleatory and Epistemic Uncertainty. Struct. Multidiscip. Optim. 2021, 63, 645–660. [Google Scholar] [CrossRef]
- Lee, D.; Kim, N.H.; Kim, H.-S. Validation and Updating in a Large Automotive Vibro-Acoustic Model Using a P-Box in the Frequency Domain. Struct. Multidiscip. Optim. 2016, 54, 1485–1508. [Google Scholar] [CrossRef]
- Strang, G.; Nguyen, T. Wavelets and Filter Banks; SIAM: Bangkok, Thailand, 1996; ISBN 978-0-9614088-7-9. [Google Scholar]
- Barros, J.; Diego, R.I. Analysis of Harmonics in Power Systems Using the Wavelet Packet Transform. In Proceedings of the 2005 IEEE Instrumentationand Measurement Technology Conference Proceedings, Ottawa, ON, Canada, 16–19 May 2005; Volume 2, pp. 1484–1488. [Google Scholar]
- Liang, P.; Deng, C.; Wu, J.; Yang, Z.; Zhu, J.; Zhang, Z. Single and Simultaneous Fault Diagnosis of Gearbox via a Semi-Supervised and High-Accuracy Adversarial Learning Framework. Knowl. Based Syst. 2020, 198, 105895. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, X.; Chen, D. CSRNet: Dilated Convolutional Neural Networks for Understanding the Highly Congested Scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 19–21 June 2018; pp. 1091–1100. [Google Scholar]
- Yu, F.; Koltun, V. Multi-Scale Context Aggregation by Dilated Convolutions. arXiv 2016, arXiv:1511.07122. [Google Scholar]
- Gozzi, N.; Malandri, L.; Mercorio, F.; Pedrocchi, A. XAI for Myo-Controlled Prosthesis: Explaining EMG Data for Hand Gesture Classification. Knowl. Based Syst. 2022, 240, 108053. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | Model | Reference |
|---|---|---|
| Vibration signal Statistical feature | ANN | Kankar et al., 2011 [4] |
| Vibration signal Statistical feature | SVM | Kankar et al., 2011 [4] |
| Voltage and current signal | KNN | Samanta et al., 2016 [5] |
| Statistical features (time and frequency domains) and select features using PCA/ICA | SVM RVM | Widodo et al., 2019 [6] |
| RGB multisignal image | CNN | Xie et al., 2021 [16] |
| Gray scale current signal image | CNN | Hoang et al., 2020 [17] |
| Frequency spectrum of the vibration data | CNN | Janssens et al., 2016 [18] |
| Light emission images | CAE | Park et al., 2011 [19] |
| Kurtogram images of gear signals | Deep learning model-based SSAE | Saufi et al., 2020 [20] |
| Input | Method | Reference |
|---|---|---|
| Time series data | Window warping | Le Guennec et al., 2016 [11] |
| Accelerometer and gyroscope sensor data | Cropping | Li et al., 2019 [13] |
| Wearable sensor data | Magnitude-warping | Um et al., 2017 [12] |
| Computed tomography (CT) image | GAN | Frid-Adar et al., 2018 [14] |
| Vibration signal | Model-based data augmentation | Lu Qian et al., 2022 [24] |
| Vibration signal | Synthetic data augmentation | Khan et al., 2021 [8] |
| Bearing dataset | Simulates data at various workloads and rotational speeds | Hu et al., 2020 [25] |
| Wind turbine conditions based on supervisory control and data acquisition (SCADA) data | GAN | Liu et al. [26] |
| Vibration signal | WCGAN | Liu et al. [26] |
| Frequency spectrum | ACGAN | Li et al., 2019 [28] |
| Frequency spectrum | CGAN | Wang et al., 2020 [29] |
| Parameter | Properties |
|---|---|
| Robot type | Robostar R004 welding robot |
| Sensitivity of sensor | 64 mV/A |
| Health state | Normal, fault |
| Fault type | Strain Wave gear fault (bearing inner ring fault) in axis 3 |
| Data type | 1st phase of electrical current |
| Sampling frequency | 2048 Hz |
| Motion | Properties | Data Size |
|---|---|---|
| Operation 1 (A → B) | 1. A-point welding 2. Moving from A to B (40% of the maximum operating speed) | (27, 839, 10) |
| Operation 2 (B → C) | 1. B-point welding 2. Moving from B to C (20% of the maximum operating speed) | (37, 799, 10) |
| Operation 3 (C → D) | 1. C-point welding 2. Moving from C to D (60% of the maximum operating speed) | (25, 634, 10) |
| Type | Number of Samples |
|---|---|
| Operation 1_Normal | 500 |
| Operation 1_Fault | 500 |
| Operation 2_Normal | 500 |
| Operation 2_Fault | 500 |
| Operation 3_Normal | 500 |
| Operation 3_Fault | 500 |
| Type | Normal | Fault |
|---|---|---|
| Operation 1 |  |  |
| Operation 2 |  |  |
| Operation 3 |  |  |
| Methods | Input Data |
|---|---|
| Area-metric-based sampling | CWT-scalogram (proposed method) |
| STFT-spectrogram | |
| Grayscale image | |
| 1D raw signal | |
| Random sampling | CWT-scalogram |
| STFT-spectrogram | |
| Grayscale image | |
| 1D raw signal |
| Metric | Equation |
|---|---|
| Precision | |
| Recall | |
| F1-score | |
| Accuracy |
| Method | Area-Metric-Based Sampling | Random Sampling | ||||||
|---|---|---|---|---|---|---|---|---|
| Precision (%) | Recall (%) | F1-Score (%) | Accuracy (%) | Precision (%) | Recall (%) | F1-Score (%) | Accuracy (%) | |
| Dilated-CNN using CWT-scalogram | 95.57 | 95.46 | 95.49 | 95.44 | 88.55 | 88.40 | 88.36 | 88.33 |
| CNN using CWT-scalogram | 92.53 | 92.20 | 91.98 | 92.11 | 88.12 | 87.77 | 87.77 | 87.78 |
| CNN using STFT-spectrogram | 91.76 | 91.76 | 91.66 | 91.78 | 69.29 | 69.05 | 68.70 | 68.89 |
| CNN using Grayscale image | 87.80 | 87.81 | 87.68 | 87.67 | 60.18 | 59.08 | 58.77 | 58.78 |
| CNN using 1D raw signal | 83.33 | 83.52 | 83.25 | 83.44 | 49.82 | 50.06 | 49.72 | 48.89 |
| Input | Attention Map | |
|---|---|---|
| Operation 1 Normal |  |  |
| Operation 1 Fault |  |  |
| Operation 2 Normal |  |  |
| Operation 2 Fault |  |  |
| Operation 3 Normal |  |  |
| Operation 3 Fault |  |  |
| Input | Convolution Layer 1 | Convolution Layer 2 | Convolution Layer 3 | |
|---|---|---|---|---|
| Dilated-CNN using CWT-scalogram |  |  |  |  |
| CNN using CWT-scalogram |  |  |  |  |
| CNN using STFT-spectrogram |  |  |  |  |
| CNN using Grayscale image |  |  |  |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noh, Y.R.; Khalid, S.; Kim, H.S.; Choi, S.-K. Intelligent Fault Diagnosis of Robotic Strain Wave Gear Reducer Using Area-Metric-Based Sampling. Mathematics 2023, 11, 4081. https://doi.org/10.3390/math11194081
Noh YR, Khalid S, Kim HS, Choi S-K. Intelligent Fault Diagnosis of Robotic Strain Wave Gear Reducer Using Area-Metric-Based Sampling. Mathematics. 2023; 11(19):4081. https://doi.org/10.3390/math11194081
Chicago/Turabian StyleNoh, Yeong Rim, Salman Khalid, Heung Soo Kim, and Seung-Kyum Choi. 2023. "Intelligent Fault Diagnosis of Robotic Strain Wave Gear Reducer Using Area-Metric-Based Sampling" Mathematics 11, no. 19: 4081. https://doi.org/10.3390/math11194081
APA StyleNoh, Y. R., Khalid, S., Kim, H. S., & Choi, S.-K. (2023). Intelligent Fault Diagnosis of Robotic Strain Wave Gear Reducer Using Area-Metric-Based Sampling. Mathematics, 11(19), 4081. https://doi.org/10.3390/math11194081