
Design a Robust Proportional-Derivative Gain-Scheduling Control for a Magnetic Levitation System




Abstract
1. Introduction
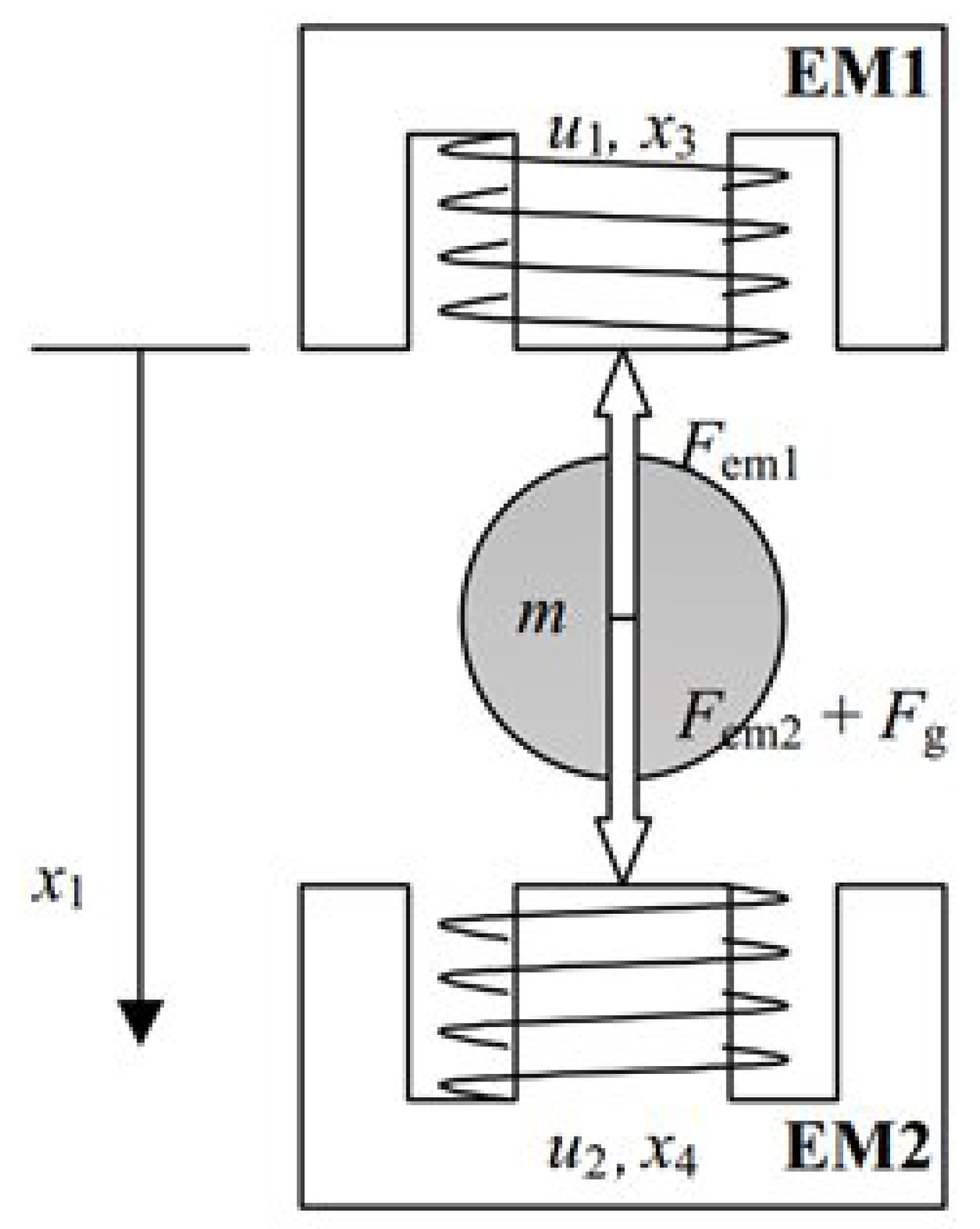
2. Magnetic Levitation and Modeling
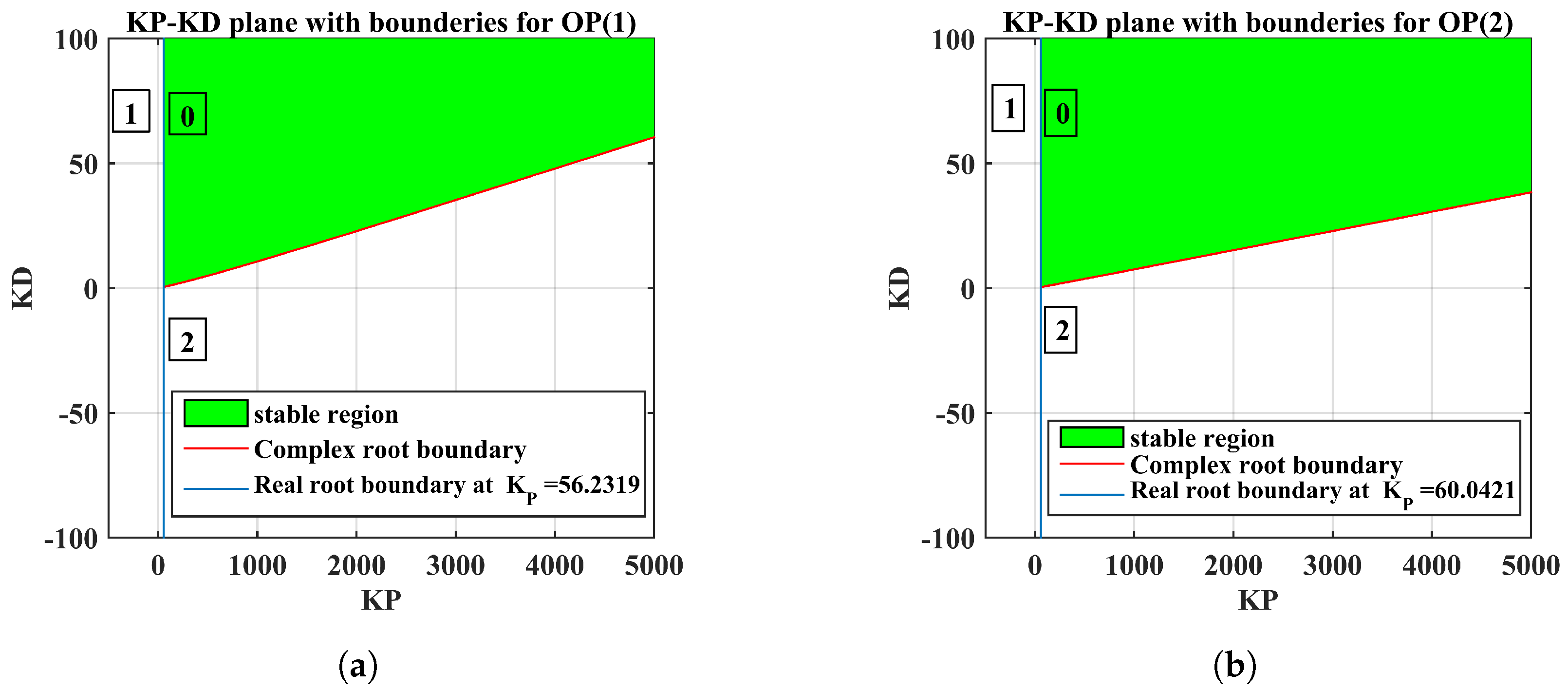
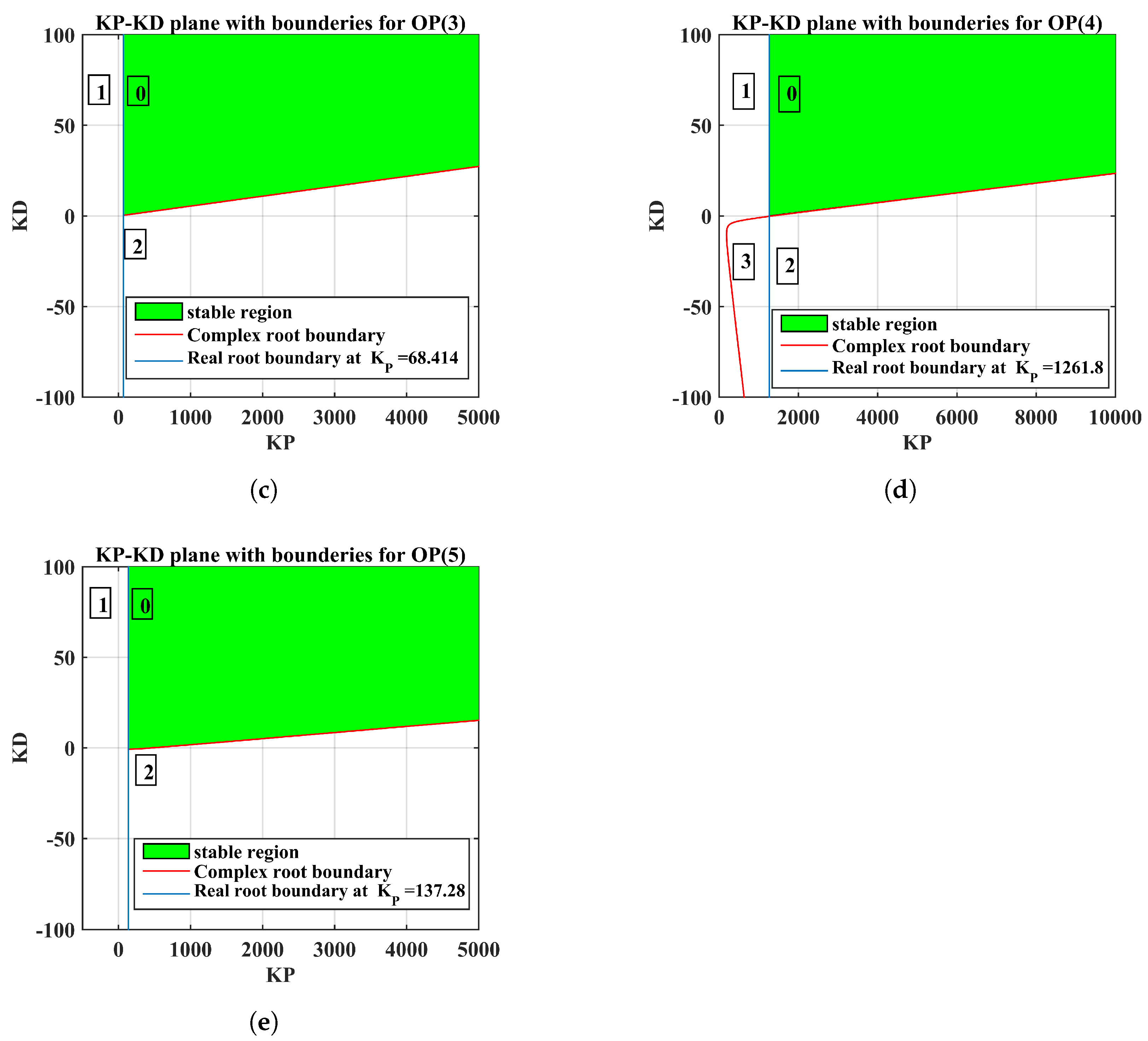
3. Stability Analysis
Stabilizing Controller Gains
4. Controller Design
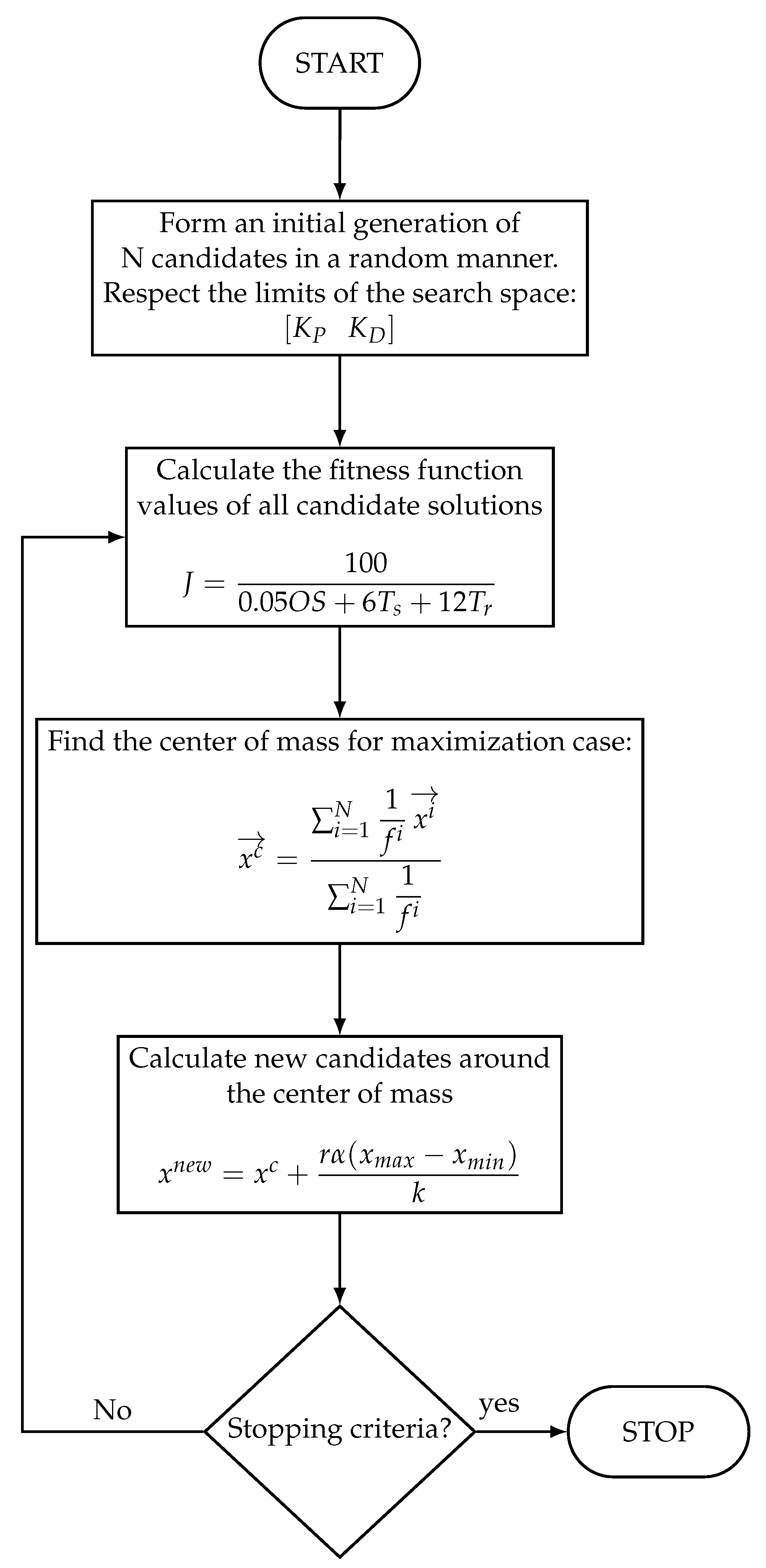
4.1. The Big Bang–Big Crunch Optimization Algorithm
- The Big Bang Phase: During the Big Bang phase, the candidate solutions are randomly spread throughout the search space, comparable to the exploded atoms during the Big Bang in cosmology. This phase is in control of exploration, allowing the solutions to cover a large portion of the search space.
- The Big Crunch Phase: Following the Big Bang phase, the algorithm initiates the Big Crunch phase, which depicts the contraction of matter in the universe, resulting in the construction of structures. During this phase, potential solutions are drawn to promising parts of the search space, identical to the development of galaxies and other cosmic structures. This phase focuses on exploitation, refining solutions, and convergence toward optimal solutions.The output of the Big Crunch phase can be defined as the center of mass. The center of mass is denoted by , which can be expressed as follows:where and are vectors in an n-dimensional search space, is the value of this point’s objective function, and N is the population size in the Big Bang phase.The following stage generates new points that are used in the Big Bang phase following the Big Crunch phase, generating the center of mass (). The newly generated points are redistributed in all directions around the center of mass ():where r is a random number, is a parameter that limits the size of the search space, and k is the number of iterations. [58,59,60,61,62].
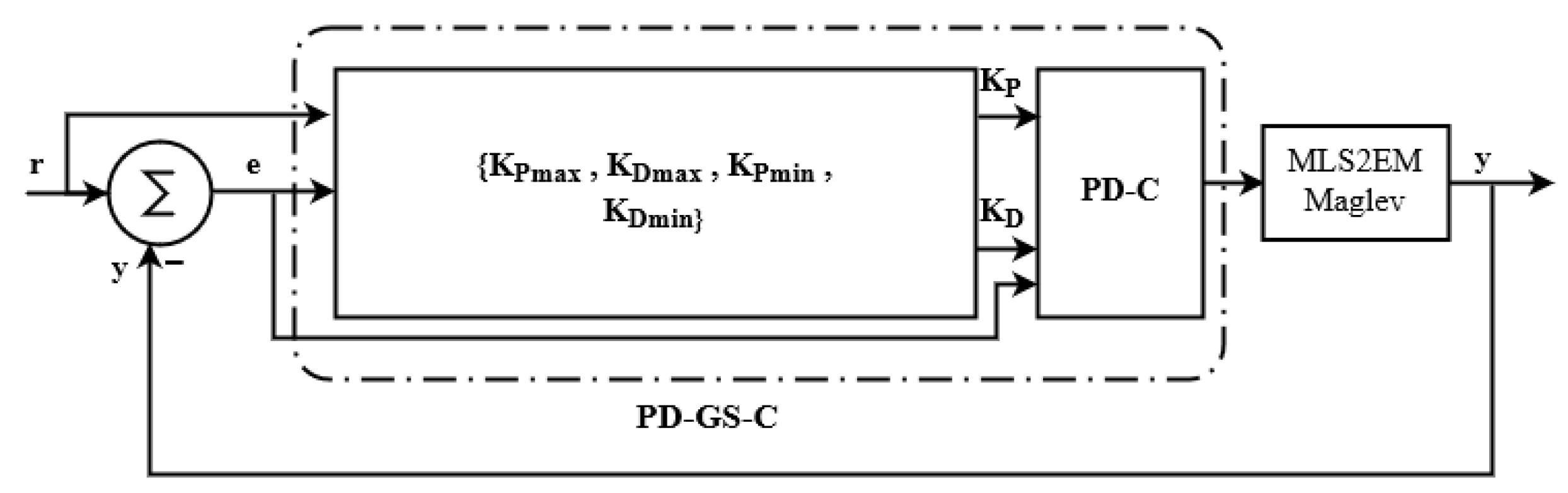
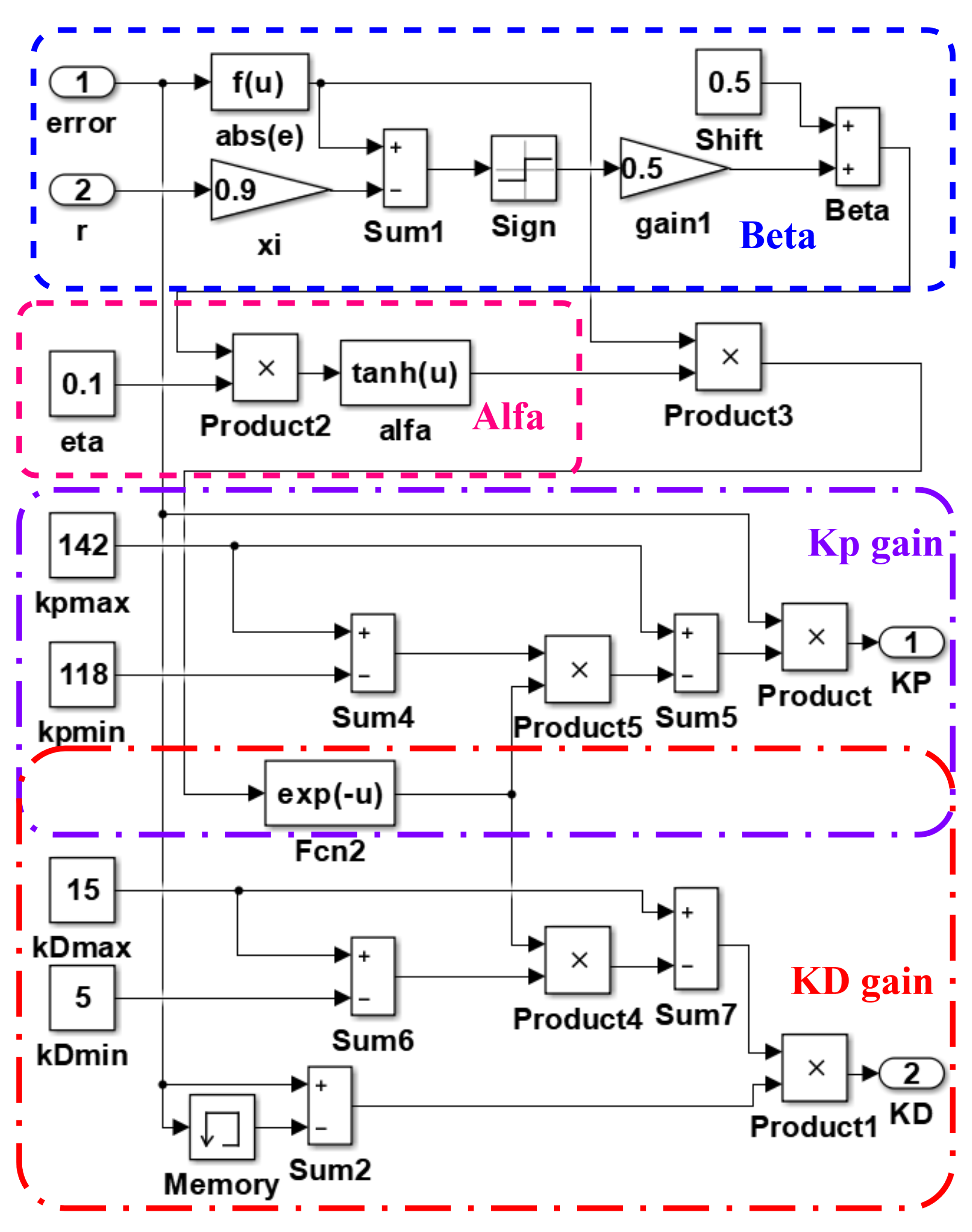
4.2. The Proportional-Derivative Gain-Scheduling Controller (PD-GS-C)
5. Simulation Results
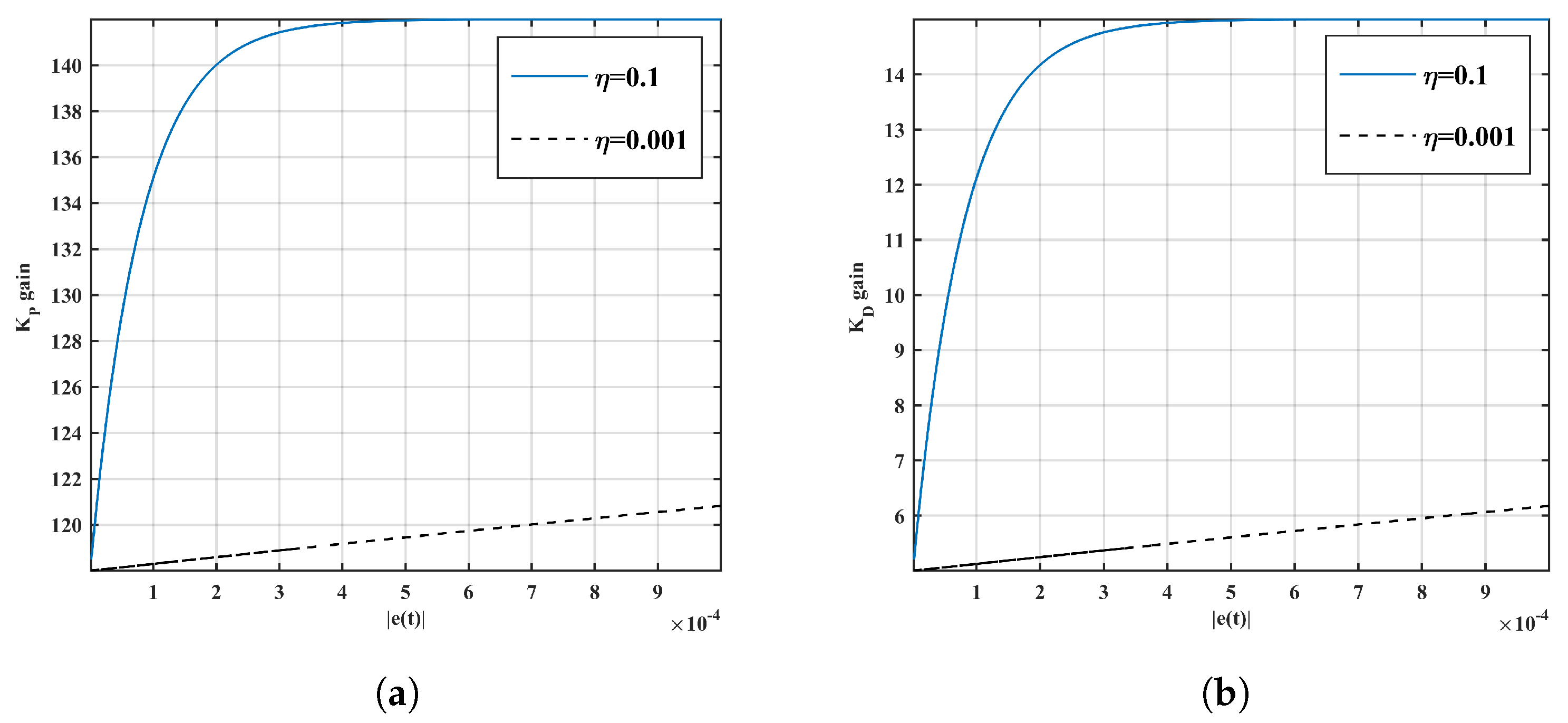
- and are enabled during the steady state to achieve a minimal value of steady-state error () to resolve the unacceptable challenge of overshoot as shown in Figure 9.
- and are generated when the process steady-state error is large in order to provide a significant control signal and to mitigate unfavorable fluctuation and error, as illustrated in Figure 9.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PD-C | Proportional-derivative controller |
| PD-GS-C | Proportional-derivative gain-scheduling controller |
| BB-BC | Big Bang–Big Crunch optimization |
References
- Sinha, P.K. Electromagnetic Suspension Dynamics & Control; Savoy Place: London, UK, 1987. [Google Scholar]
- Czerwiński, K.; Ławryńczuk, M. Identification of discrete-time model of active magnetic levitation system. In Proceedings of the Trends in Advanced Intelligent Control, Optimization and Automation: Proceedings of KKA 2017—The 19th Polish Control Conference, Kraków, Poland, 18–21 June 2017; pp. 599–608.
- Sun, Z. Magnetic Levitation Based on Switched Reluctance Actuator. Ph.D. Thesis, Hong Kong Polytechnic University, Hong Kong, China, 2011. [Google Scholar]
- Almobaied, M.; Al-Nahhal, H.S.; Issa, K.B. Computation of stabilizing PID controllers for magnetic levitation system with parametric uncertainties. In Proceedings of the 2021 International Conference on Electric Power Engineering–Palestine (ICEPE-P), Gaza, Palestine, 23–24 March 2021; pp. 1–7. [Google Scholar]
- Bojan-Dragos, C.A.; Stinean, A.I.; Precup, R.E.; Preitl, S.; Petriu, E.M. Model predictive control solution for magnetic levitation systems. In Proceedings of the 2015 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; pp. 139–144. [Google Scholar]
- Eroğlu, Y.; Ablay, G. Cascade sliding mode-based robust tracking control of a magnetic levitation system. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 851–860. [Google Scholar] [CrossRef]
- El Hajjaji, A.; Ouladsine, M. Modeling and nonlinear control of magnetic levitation systems. IEEE Trans. Ind. Electron. 2001, 48, 831–838. [Google Scholar] [CrossRef]
- Barie, W.; Chiasson, J. Linear and nonlinear state-space controllers for magnetic levitation. Int. J. Syst. Sci. 1996, 27, 1153–1163. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Valderrabano-Gonzalez, A.; Rosas-Caro, J.; Favela-Contreras, A. Output feedback control of a mechanical system using magnetic levitation. ISA Trans. 2015, 57, 352–359. [Google Scholar] [CrossRef] [PubMed]
- Morales, R.; Sira-Ramírez, H. Trajectory tracking for the magnetic ball levitation system via exact feedforward linearisation and GPI control. Int. J. Control 2010, 83, 1155–1166. [Google Scholar] [CrossRef]
- Nielsen, C.; Fulford, C.; Maggiore, M. Path following using transverse feedback linearization: Application to a maglev positioning system. Automatica 2010, 46, 585–590. [Google Scholar] [CrossRef]
- Zhang, J.; Tao, T.; Mei, X.; Jiang, G.; Zhang, D. Non-linear robust control of a voltage-controlled magnetic levitation system with a feedback linearization approach. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2011, 225, 85–98. [Google Scholar] [CrossRef]
- El Rifai, O.M.; Youcef-Toumi, K. Achievable performance and design trade-offs in magnetic levitation control. In Proceedings of the AMC’98-Coimbra—1998 5th International Workshop on Advanced Motion Control, Coimbra, Portugal, 29 June–1 July 1998; pp. 586–591. [Google Scholar]
- Hasirci, U.; Balikci, A.; Zabar, Z.; Birenbaum, L. A novel magnetic-levitation system: Design, implementation, and nonlinear control. IEEE Trans. Plasma Sci. 2010, 39, 492–497. [Google Scholar] [CrossRef]
- Baranowski, J.; Piątek, P. Observer-based feedback for the magnetic levitation system. Trans. Inst. Meas. Control 2012, 34, 422–435. [Google Scholar] [CrossRef]
- Al-Araji, A.S. Cognitive non-linear controller design for magnetic levitation system. Trans. Inst. Meas. Control 2016, 38, 215–222. [Google Scholar] [CrossRef]
- Benitez-Pérez, H.; Ortega-Arjona, J.; Cardenas-Flores, F.; Quiñones-Reyes, P. Reconfiguration control strategy using Takagi–Sugeno model predictive control for network control systems—A magnetic levitation case study. Proc. Inst. Mech. Eng.-Part I J. Syst. Control Eng. 2010, 224, 1022. [Google Scholar] [CrossRef]
- Chen, S.Y.; Lin, F.J.; Shyu, K.K. Direct decentralized neural control for nonlinear MIMO magnetic levitation system. Neurocomputing 2009, 72, 3220–3230. [Google Scholar] [CrossRef]
- Cho, D.; Kato, Y.; Spilman, D. Sliding mode and classical controllers in magnetic levitation systems. IEEE Control Syst. Mag. 1993, 13, 42–48. [Google Scholar]
- Al-Muthairi, N.; Zribi, M. Sliding mode control of a magnetic levitation system. Math. Probl. Eng. 2004, 2004, 93–107. [Google Scholar] [CrossRef]
- Lin, F.J.; Chen, S.Y.; Shyu, K.K. Robust dynamic sliding-mode control using adaptive RENN for magnetic levitation system. IEEE Trans. Neural Networks 2009, 20, 938–951. [Google Scholar] [PubMed]
- Lin, F.J.; Teng, L.T.; Shieh, P.H. Intelligent adaptive backstepping control system for magnetic levitation apparatus. IEEE Trans. Magn. 2007, 43, 2009–2018. [Google Scholar] [CrossRef]
- Bächle, T.; Hentzelt, S.; Graichen, K. Nonlinear model predictive control of a magnetic levitation system. Control Eng. Pract. 2013, 21, 1250–1258. [Google Scholar] [CrossRef]
- Iplikci, S.; Bahtiyar, B. A field-programmable gate array implementation of a real-time nonlinear Runge–Kutta model predictive control. Trans. Inst. Meas. Control 2016, 38, 555–564. [Google Scholar] [CrossRef]
- Javadi, A.; Pezeshki, S. A new model-free adaptive controller versus non-linear H∞ controller for levitation of an electromagnetic system. Trans. Inst. Meas. Control 2013, 35, 321–329. [Google Scholar] [CrossRef]
- Kumar, E.V.; Jerome, J. LQR based optimal tuning of PID controller for trajectory tracking of magnetic levitation system. Procedia Eng. 2013, 64, 254–264. [Google Scholar] [CrossRef]
- Wang, B.; Liu, G.P.; Rees, D. Networked predictive control of magnetic levitation system. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 2009; pp. 4100–4105. [Google Scholar]
- An, S.; Ma, Y.; Cao, Z. Applying simple adaptive control to magnetic levitation system. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Zhangjiajie, China, 10–11 October 2009; Volume 1, pp. 746–749. [Google Scholar]
- Ziętkiewicz, J. Constrained predictive control of a levitation system. In Proceedings of the 2011 16th International Conference on Methods & Models in Automation & Robotics, Miedzyzdroje, Poland, 22–25 August 2011; pp. 278–283. [Google Scholar]
- Chauhan, S.; Nigam, M. Model predictive controller design and perturbation study for magnetic levitation system. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–6. [Google Scholar]
- King, R.; Stathaki, A. Fuzzy gain-scheduling control of nonlinear processes. In Proceedings of the WSES/IEEE/IMACS World Multiconference on Circuits, Systems, Communications and Computers CSCC’99, Athens, Greece, 4–8 July 1999. [Google Scholar]
- Huang, Y.W.; Tung, P.C. Design of a fuzzy gain scheduling controller having input saturation: A comparative study. J. Mar. Sci. Technol. 2009, 17, 249–256. [Google Scholar] [CrossRef]
- Elsodany, N.M.; Rezeka, S.F.; Maharem, N.A. Adaptive PID control of a stepper motor driving a flexible rotor. Alex. Eng. J. 2011, 50, 127–136. [Google Scholar] [CrossRef]
- Bianchi, F.D.; Peña, R.S.S. Interpolation for gain-scheduled control with guarantees. Automatica 2011, 47, 239–243. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Tomizuka, M.; Isaka, S. Fuzzy gain scheduling of PID controllers. IEEE Trans. Syst. Man Cybern. 1993, 23, 1392–1398. [Google Scholar] [CrossRef]
- Ye, Z.; Zhang, D.; Deng, C.; Yan, H.; Feng, G. Finite-time resilient sliding mode control of nonlinear UMV systems subject to DoS attacks. Automatica 2023, 156, 111170. [Google Scholar] [CrossRef]
- Lashin, M.; Elgammal, A.T.; Ramadan, A.; Abouelsoud, A.; Assal, S.F.; Abo-Ismail, A. Fuzzy-based gain scheduling of Exact FeedForward Linearization control and sliding mode control for magnetic ball levitation system: A comparative study. In Proceedings of the 2014 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–24 May 2014; pp. 1–6. [Google Scholar]
- Michino, R.; Tanaka, H.; Mizumoto, I. Application of high gain adaptive output feedback control to a magnetic levitation system. In Proceedings of the 2009 ICCAS-SICE, Fukuoka City, Japan, 18–21 August 2009; pp. 970–975. [Google Scholar]
- Puig, V.; Bolea, Y.; Blesa, J. Robust gain-scheduled Smith PID controllers for second order LPV systems with time varying delay. IFAC Proc. Vol. 2012, 45, 199–204. [Google Scholar] [CrossRef]
- Bianchi, F.D.; Sánchez-Peña, R.S.; Guadayol, M. Gain scheduled control based on high fidelity local wind turbine models. Renew. Energy 2012, 37, 233–240. [Google Scholar] [CrossRef]
- Yang, Y.; Yan, Y. Attitude regulation for unmanned quadrotors using adaptive fuzzy gain-scheduling sliding mode control. Aerosp. Sci. Technol. 2016, 54, 208–217. [Google Scholar] [CrossRef]
- Bedoud, K.; Ali-rachedi, M.; Bahi, T.; Lakel, R. Adaptive Fuzzy Gain Scheduling of PI Controller for Control of the Wind Energy Conversion Systems. Energy Procedia 2015, 74, 211–225. [Google Scholar] [CrossRef]
- Dounis, A.I.; Kofinas, P.; Alafodimos, C.; Tseles, D. Adaptive fuzzy gain scheduling PID controller for maximum power point tracking of photovoltaic system. Renew. Energy 2013, 60, 202–214. [Google Scholar] [CrossRef]
- Xie, Y.; Shi, H.; Alleyne, A.G.; Yang, B. Feedback shape control for deployable mesh reflectors using gain scheduling method. Acta Astronaut. 2016, 121, 241–255. [Google Scholar] [CrossRef]
- Bojan-Dragos, C.A.; Precup, R.E.; Preitl, S.; Hergane, S.; Hughiet, E.G.; Szedlak-Stinean, A.I. proportional–integral gain-scheduling control of a magnetic levitation system. In Proceedings of the 2016 20th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 1–6. [Google Scholar]
- Bojan-Dragos, C.A.; Precup, R.E.; Tomescu, M.L.; Preitl, S.; Tanasoiu, O.M.; Hergane, S. proportional–integral-derivative gain-scheduling control of a magnetic levitation system. Int. J. Comput. Commun. Control 2017, 12, 599–611. [Google Scholar] [CrossRef][Green Version]
- Alfaro, V.M.; Vilanova, R. Model-Reference Robust Tuning of PID Controllers; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Rojas, J.D.; Arrieta, O.; Vilanova, R. Industrial PID Controller Tuning; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Aryan, P.; Raja, G.L.; Vilanova, R. Optimal iIMC-PD double-loop control strategy for integrating processes with dead-time. In Proceedings of the APCA International Conference on Automatic Control and Soft Computing, Caparica, Portugal, 6–8 July 2022; pp. 521–531. [Google Scholar]
- Arrieta, O.; Vilanova, R. Servo/Regulation tradeoff tuning of PID controllers with a robustness consideration. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 1838–1843. [Google Scholar]
- Arrieta, O.; Vilaxova, R. Performance degradation analysis of controller tuning modes: Application to an optimal PID tuning. Int. J. Innov. Comput. Inf. Control 2010, 6, 4719–4729. [Google Scholar]
- Magnetic Levitation System 2EM (MLS2EM) User’s Manual; Inteco Ltd.: Sankt-Petersburg, Russia, 2008.
- Dragoş, C.A.; Precup, R.E.; Preitl, S.; Petriu, E.M.; Rădac, M.B. Control Solutions, Simulation and Experimental Results for a Magnetic Levitation Laboratory System. Available online: https://www.eurosim.info/fileadmin/user_upload_eurosim/EUROSIM_OA/Congress/2010/data/papers/155.pdf (accessed on 7 September 2023).
- Saeki, M. Properties of stabilizing PID gain set in parameter space. IEEE Trans. Autom. Control 2007, 52, 1710–1715. [Google Scholar] [CrossRef]
- Bhattacharyya, S.P.; Keel, L.H. Robust control: The parametric approach. In Advances in Control Education; Elsevier: Amsterdam, The Netherlands, 1995; pp. 49–52. [Google Scholar]
- Almobaied, M.; Al-Nahhal, H.S.; Issa, K.B. Robus t-Pro porti onal-Integ ral-D eriva tive Controller Design for Magnetic Levitation System Using Big Bang–Big Crunch Algorithm. Electrica 2023, 23, 270–280. [Google Scholar] [CrossRef]
- Almobaied, M.; Al-Nahhal, H.S.; Issa, K.B. Robust-PID controller design for magnetic levitation system using parameter space approach. World J. Adv. Eng. Technol. Sci. 2023, 8, 135–151. [Google Scholar] [CrossRef]
- Erol, O.K.; Eksin, I. A new optimization method: Big bang–big crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Kumbasar, T.; Eksin, I.; Guzelkaya, M.; Yesil, E. Adaptive fuzzy model based inverse controller design using BB-BC optimization algorithm. Expert Syst. Appl. 2011, 38, 12356–12364. [Google Scholar] [CrossRef]
- Yılmaz, S.; Gökaşan, M. Optimal trajectory planning by big bang-big crunch algorithm. In Proceedings of the 2014 International Conference on Control, Decision and Information Technologies (CoDIT), Metz, France, 3–5 November 2014; pp. 557–561. [Google Scholar]
- Dincel, E.; Genc, V.I. A power system stabilizer design by big bang-big crunch algorithm. In Proceedings of the 2012 IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 23–25 November 2012; pp. 307–312. [Google Scholar]
- Almobaied, M.; Eksin, I.; Guzelkaya, M. Design of LQR controller with big bang-big crunch optimization algorithm based on time domain criteria. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 1192–1197. [Google Scholar]
- Sedaghati, A. A PI controller based on gain-scheduling for synchronous generator. Turk. J. Electr. Eng. Comput. Sci. 2006, 14, 241–251. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Value | Unit |
|---|---|---|
| m | [kg] | |
| g | [m/s2] | |
| [H] | ||
| [m] | ||
| [ms] | ||
| [m] | ||
| [A] | ||
| [A] | ||
| [m] |
| Test Point | System Poles | Number of Unstable Poles in a Specific Area | Stability of the Area | |
|---|---|---|---|---|
| [−100 5] | * −2.4885 + 0.0000i −0.6406 + 2.0984i −0.6406 − 2.0984i 0.3144 + 0.0000i | 1 | unstable area | |
| * −2.4722 + 0.0000i −0.4420 + 2.0257i −0.4420 − 2.0257i −0.0991 + 0.0000i | 0 | stable area | ||
| * 0.3379 + 2.2962i 0.3379 − 2.2962i −2.2768 + 0.0000i −1.8542 + 0.0000i | 2 | unstable area | ||
| * −0.8189 + 1.9817i −0.8189 − 1.9817i −2.0321 + 0.0000i 0.3107 + 0.0000i | 1 | unstable area | ||
| * −2.0265 + 0.0000i −0.6212 + 1.8939i −0.6212 − 1.8939i −0.0901 + 0.0000i | 0 | stable area | ||
| * 0.2069 + 2.1753i 0.2069 − 2.1753i −1.8864 + 0.1139i −1.8864 − 0.1139i | 2 | unstable area | ||
| * −1.0710 + 1.8602i −1.0710 − 1.8602i −1.5108 + 0.0000i 0.3105 + 0.0000i | 1 | unstable area | ||
| * −0.8812 + 1.7439i −0.8812 − 1.7439i −1.5089 + 0.0000i −0.0710 + 0.0000i | 0 | stable area | ||
| * 0.0458 + 2.0269i 0.0458 − 2.0269i −1.9027 + 0.0000i −1.5311 + 0.0000i | 2 | unstable area | ||
| * −1.9547 + 1.8215i −1.9547 − 1.8215i 0.3581 + 0.0000i −0.2211 + 0.0000i | 1 | unstable area | ||
| * −3.2066 + 0.0000i −0.2722 + 2.1504i −0.2722 − 2.1504i −0.0213 + 0.0000i | 0 | stable area | ||
| * −4.7157 + 0.0000i 0.4825 + 1.7053i 0.4825 − 1.7053i −0.0217 + 0.0000i | 2 | unstable area | ||
| * −4.4271 + 0.0000i 0.3200 + 1.2076i 0.3200 − 1.2076i 0.0146 + 0.0000i | 3 | unstable area | ||
| * −1.6553 + 1.7938i −1.6553 − 1.7938i −0.5373 + 0.0000i 0.3268 + 0.0000i | 1 | unstable area | ||
| * −1.4543 + 1.5878i −1.4543 − 1.5878i −0.4857 + 0.0000i −0.1269 + 0.0000i | 0 | stable area | ||
| −377.1251 −60.7665 67.2404 18.5370 | 2 | unstable area |
| Lower Bounds | Upper Bounds | Optimal Values of | Value of the Cost Function | (sec) | (sec) | (sec) | |||
|---|---|---|---|---|---|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almobaied, M.; Al-Nahhal, H.S.; Arrieta, O.; Vilanova, R. Design a Robust Proportional-Derivative Gain-Scheduling Control for a Magnetic Levitation System. Mathematics 2023, 11, 4040. https://doi.org/10.3390/math11194040
Almobaied M, Al-Nahhal HS, Arrieta O, Vilanova R. Design a Robust Proportional-Derivative Gain-Scheduling Control for a Magnetic Levitation System. Mathematics. 2023; 11(19):4040. https://doi.org/10.3390/math11194040
Chicago/Turabian StyleAlmobaied, Moayed, Hassan S. Al-Nahhal, Orlando Arrieta, and Ramon Vilanova. 2023. "Design a Robust Proportional-Derivative Gain-Scheduling Control for a Magnetic Levitation System" Mathematics 11, no. 19: 4040. https://doi.org/10.3390/math11194040
APA StyleAlmobaied, M., Al-Nahhal, H. S., Arrieta, O., & Vilanova, R. (2023). Design a Robust Proportional-Derivative Gain-Scheduling Control for a Magnetic Levitation System. Mathematics, 11(19), 4040. https://doi.org/10.3390/math11194040