
On the Stability of a Convective Flow with Nonlinear Heat Sources



Abstract
1. Introduction
- The analysis of the nonlinear boundary value problem for the temperature distribution is performed using rigorous mathematical tools such as Krasnosel’skiĭ–Guo cone expansion/contraction theorem. It is shown in the paper that, depending on the value of the Frank–Kamenetskii parameter (characterizing the thermal effect of the reaction), the number of solutions is 0, 1 or 2.
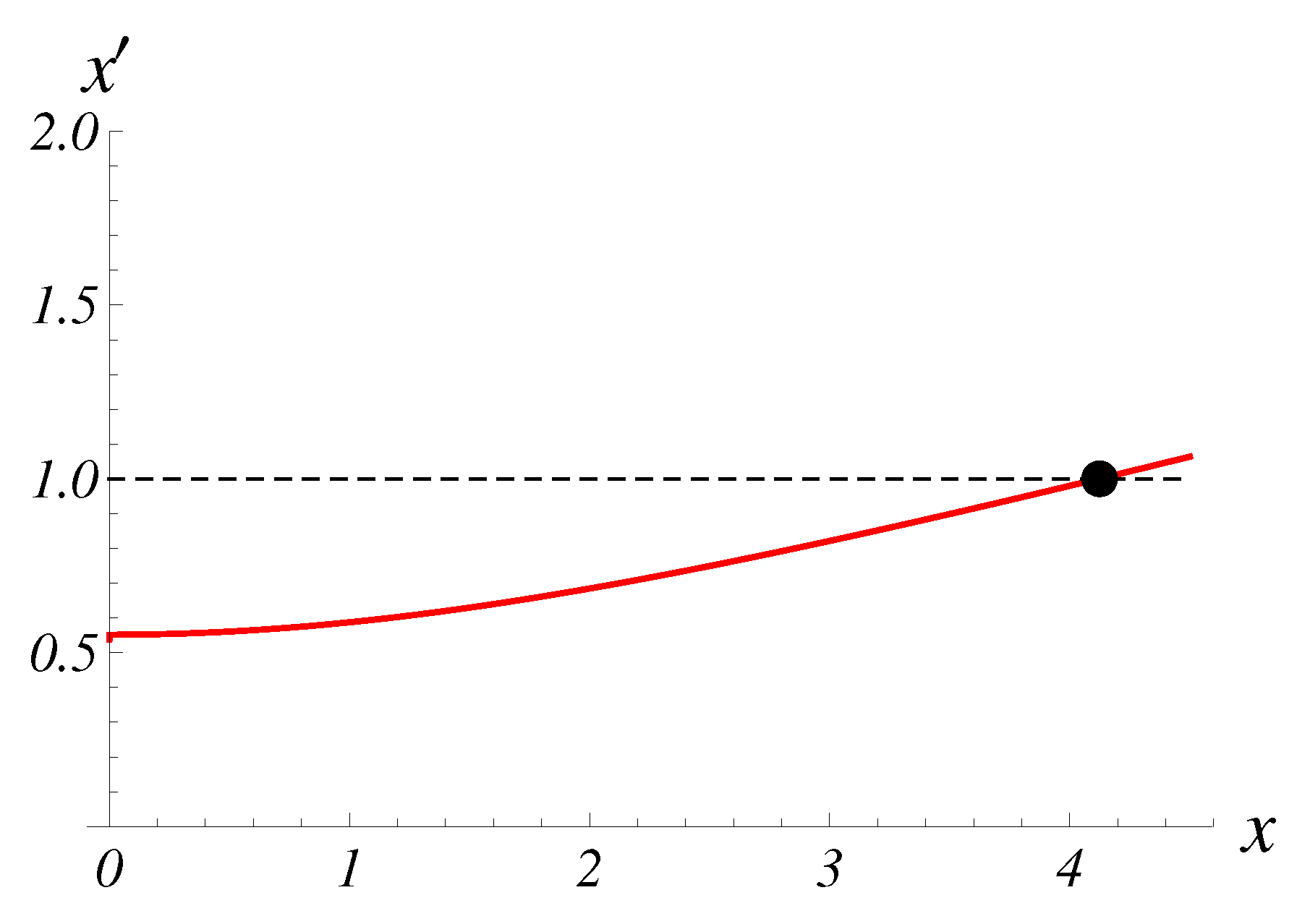
- In addition, it is proved that in the region of interest for linear stability analysis, there are two solutions of the nonlinear boundary value problem such that the maximum norm of one solution is smaller than 1 while the maximum norm of the second solution is larger than 1. This gives a simple criterion for the base flow selection—a physically realizable solution is with the smallest maximum norm—and this solution should be chosen for stability analysis.
- Bifurcation analysis is performed to numerically investigate the effect of the parameters of the problem on bifurcation diagrams.
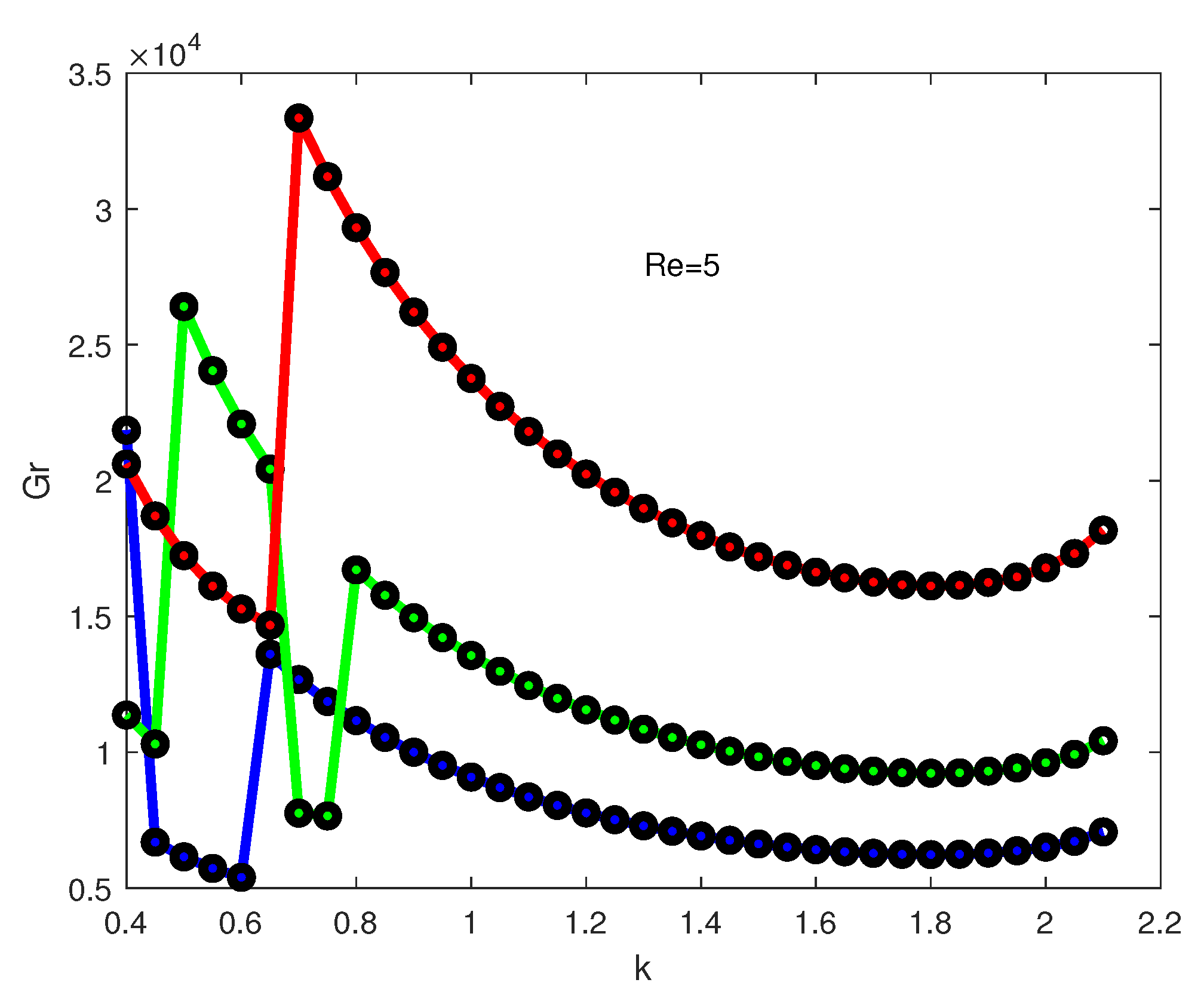
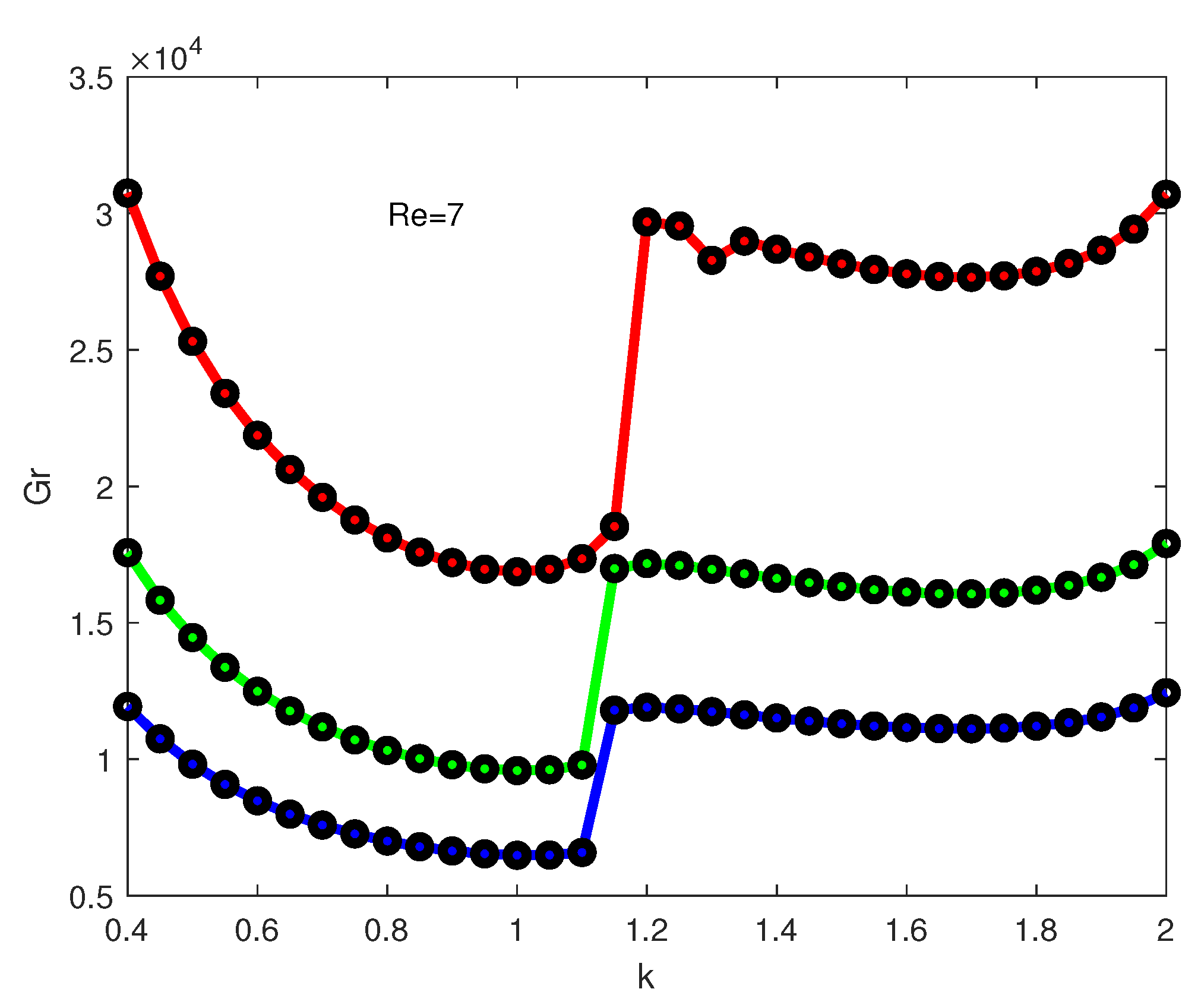
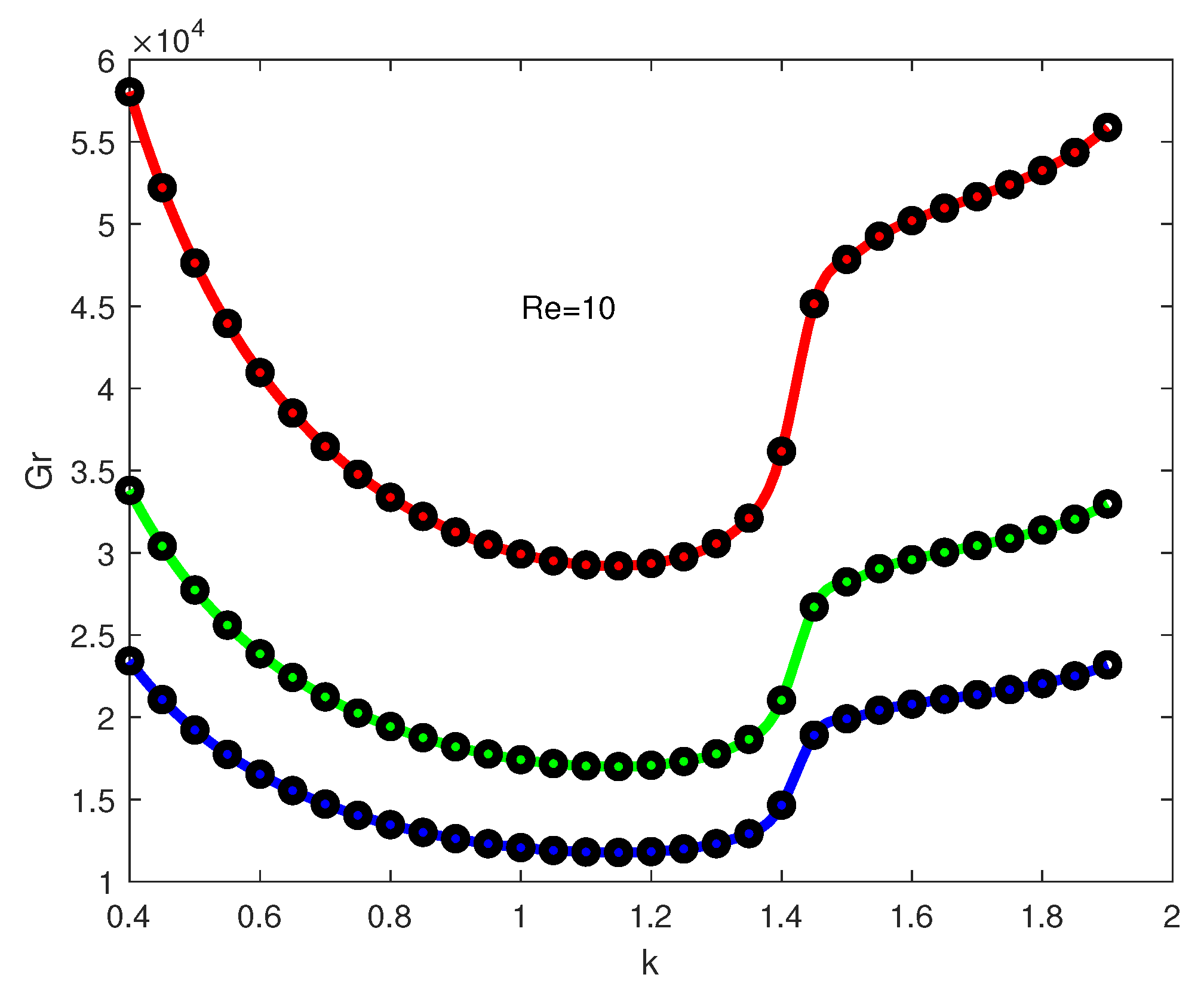
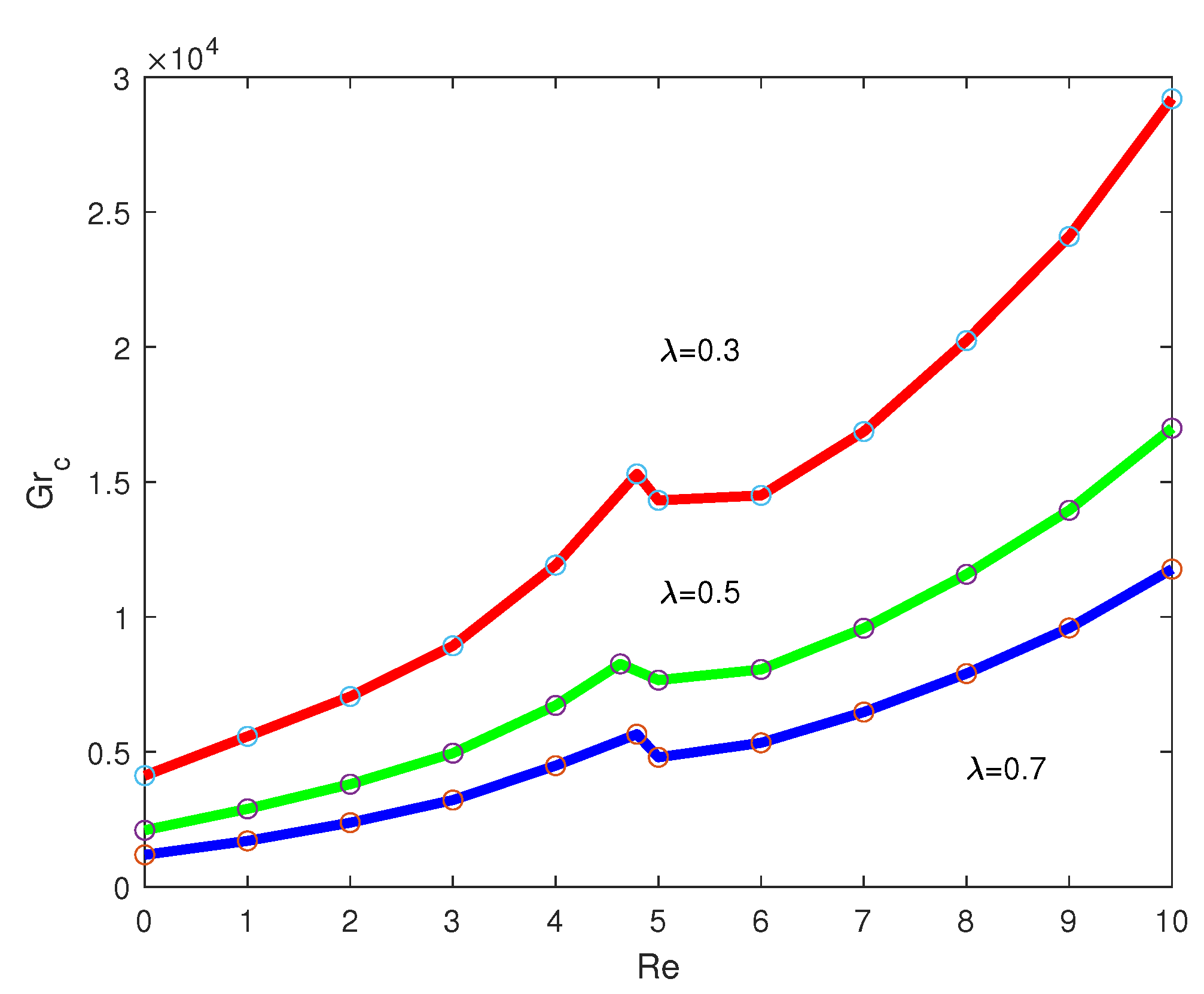
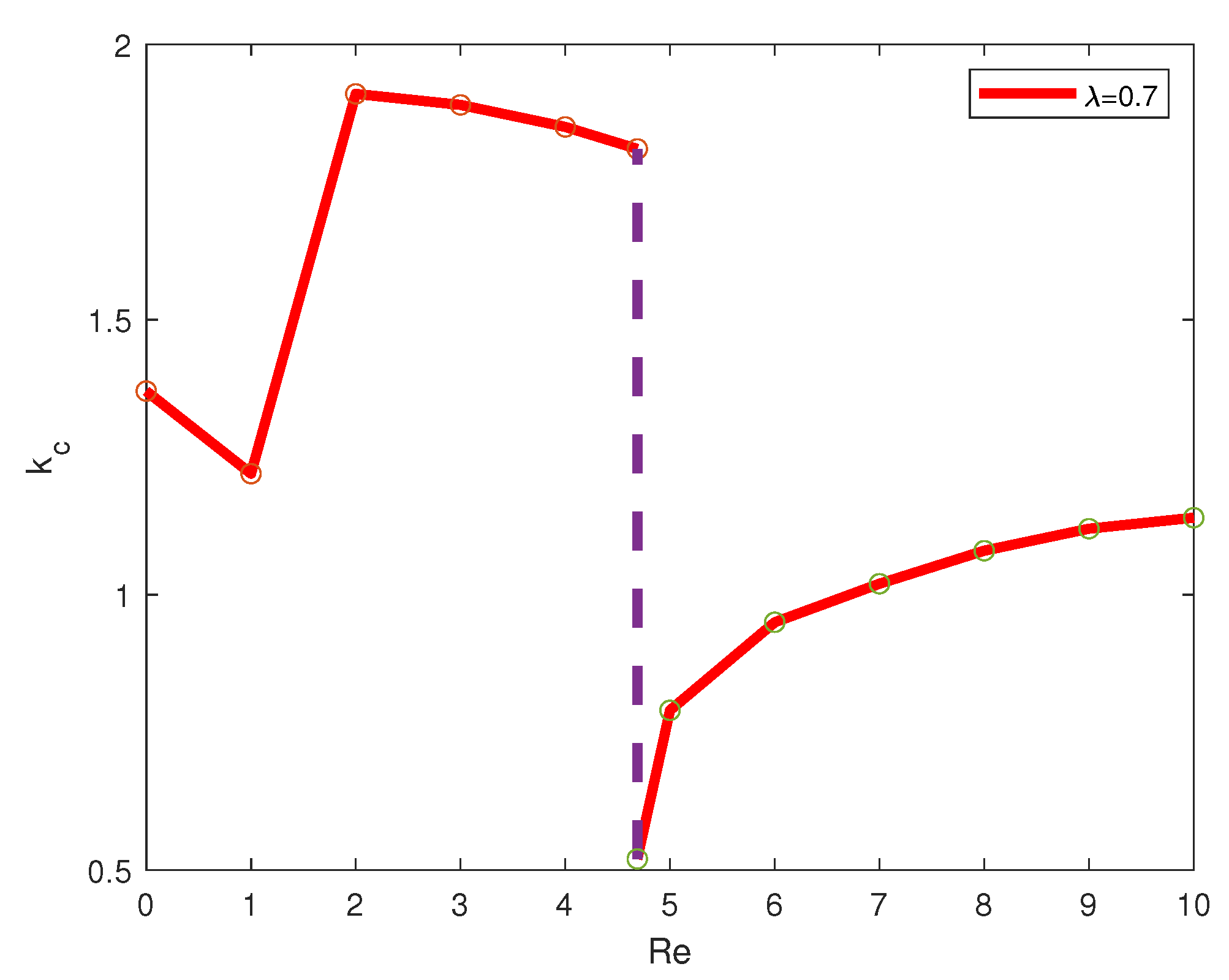
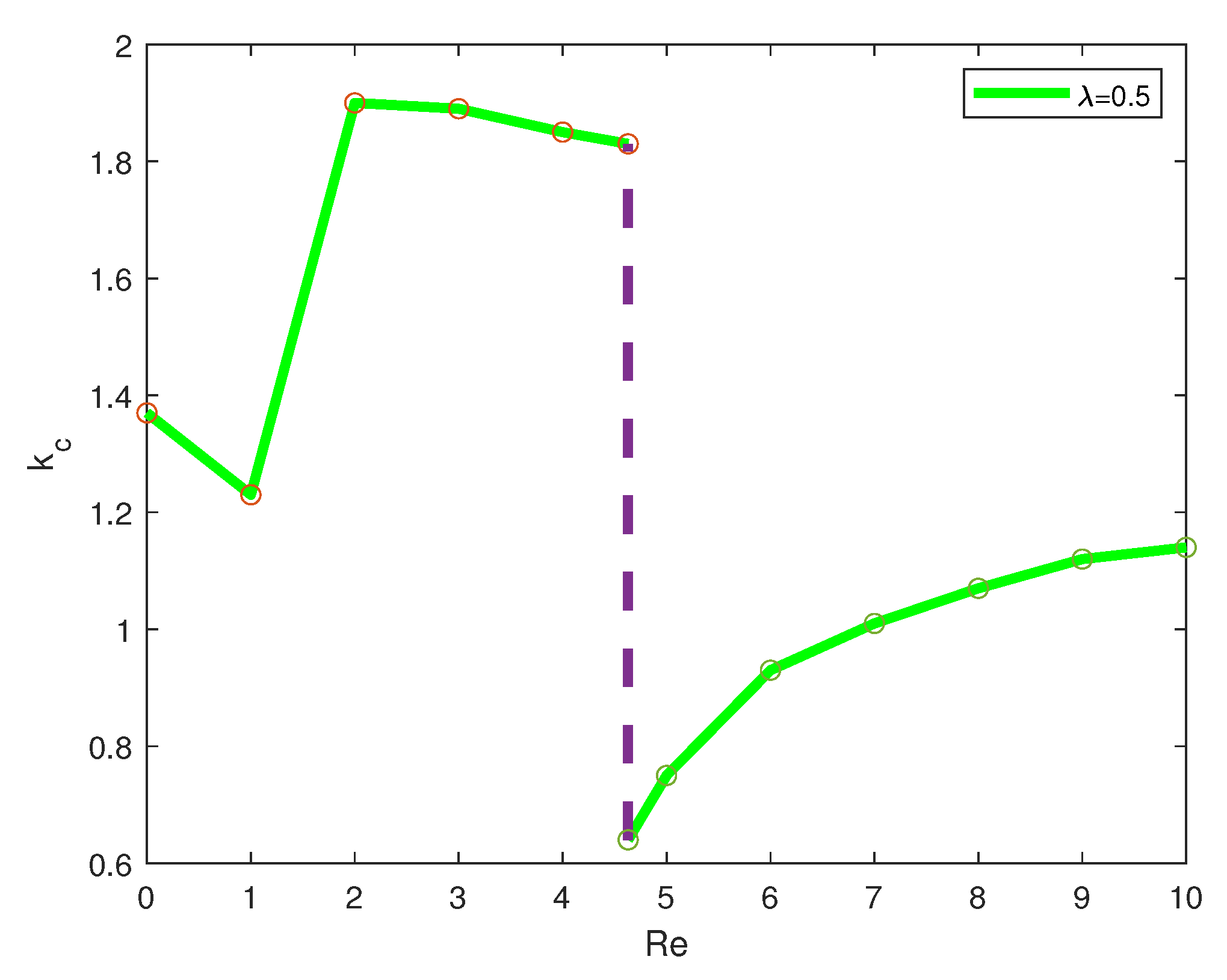
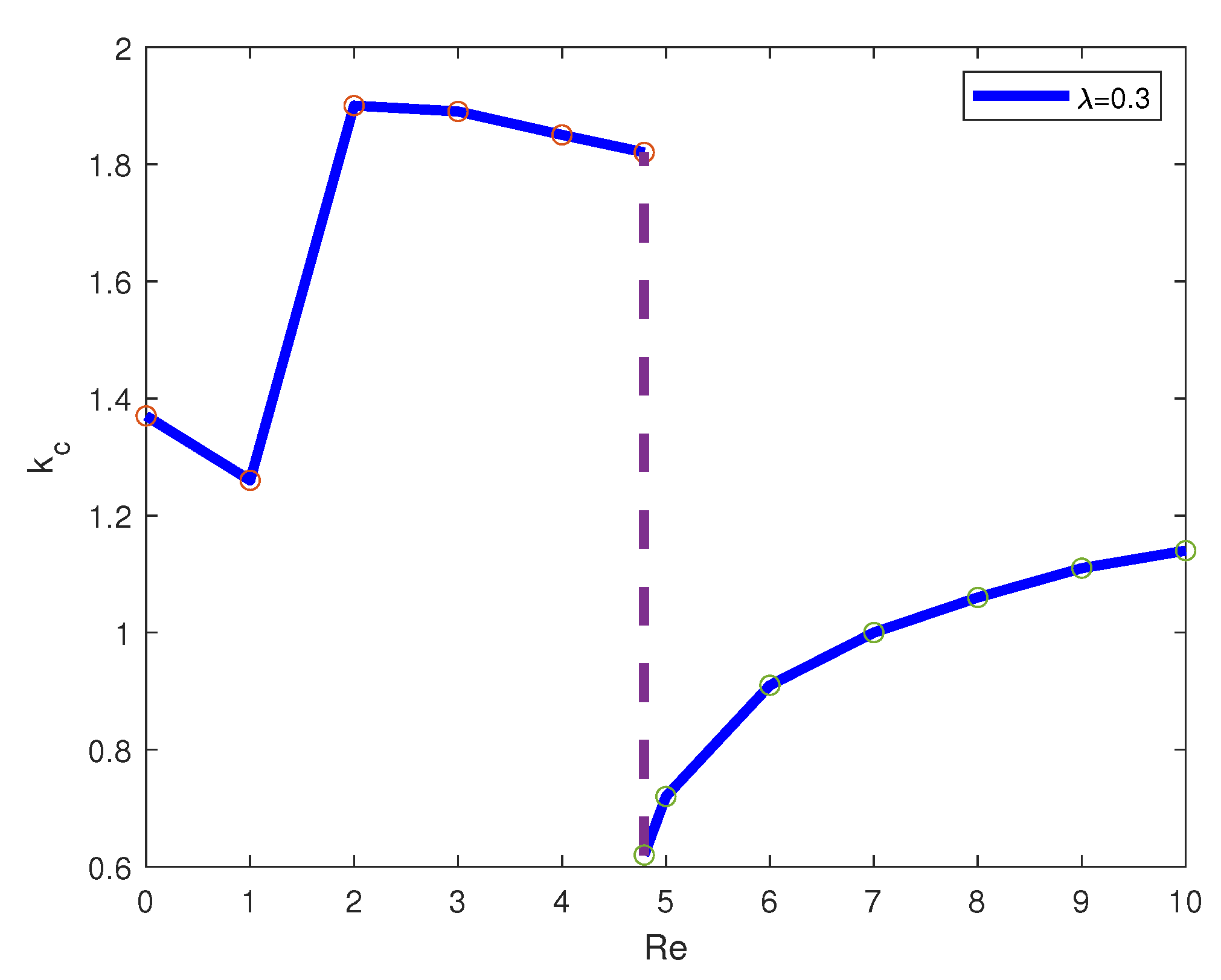
- A linear stability problem is formulated and solved numerically for different values of the parameters characterizing the problem: the Frank–Kamenetskii parameter and the Reynolds number (based on the velocity of the flow through permeable walls). Critical values of the Grasshof number are found for different values of and .
- Recommendations for the choice of parameters that result in more intensive mixing are provided.
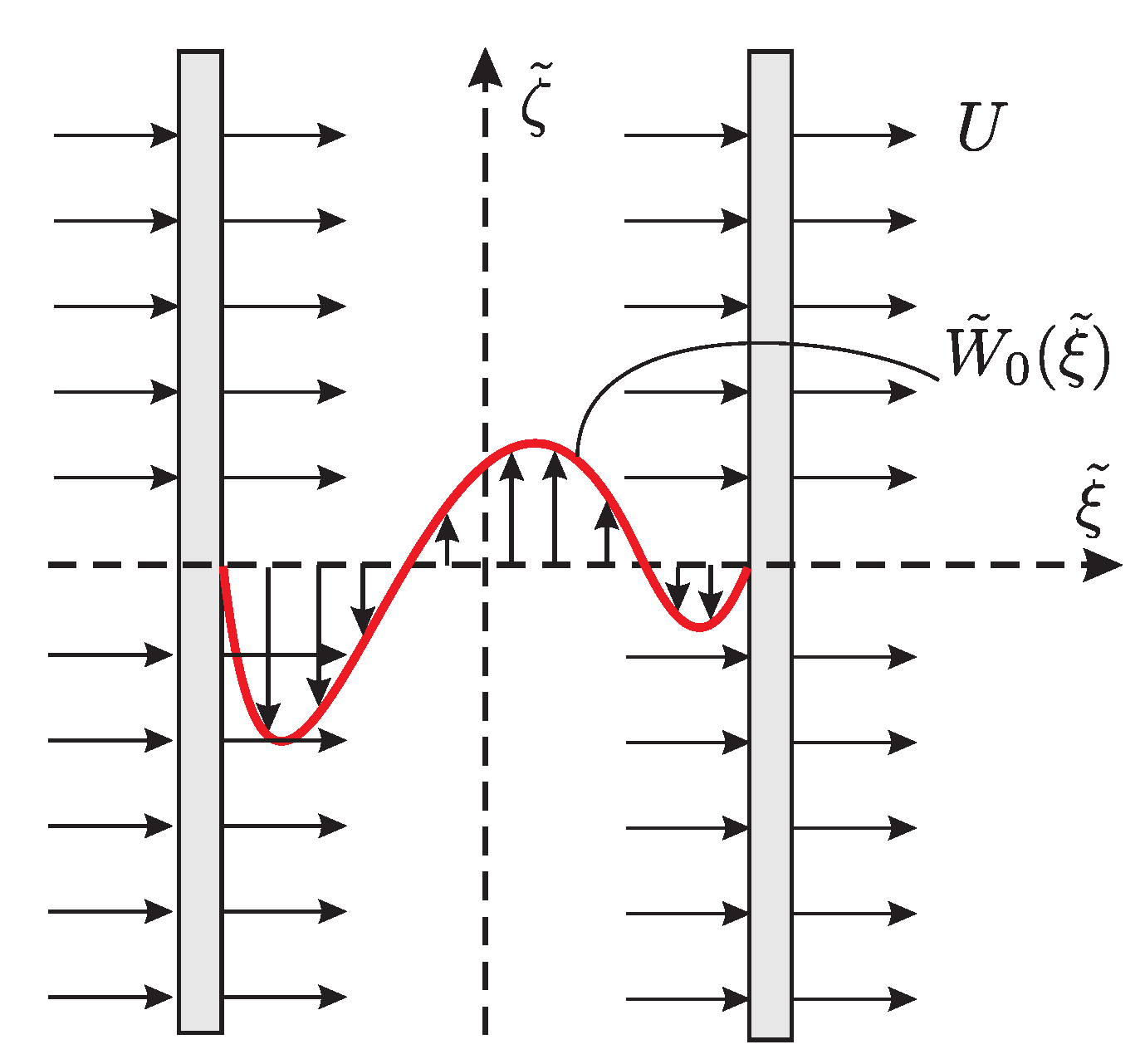
2. Mathematical Formulation of the Problem
3. Nonlinear Boundary Value Problem
4. Some Preliminaries
4.1. Linear Part of the Problem
- 1.
- for every and for every .
- 2.
- for every and .
- 3.
- for every .
- 4.
- Let a and b be two real numbers such that . LetThen, and for every and every .
4.2. Integral Operator
- 1.
- For every , for all and .
- 2.
- .
- 3.
- and the operator is completely continuous.
- 4.
- and the operator is completely continuous.
4.3. Krasnosel’skiĭ–Guo Cone Expansion/Contraction Theorem
- (H1)
- for every with and for every with ,
- (H2)
- for every with and for every with ,
- 1.
- The function defined in (21) has the following properties.
- (1a)
- , .
- (1b)
- The function strictly increases in and strictly decreases in ; the function has a unique global maximum point .
- 2.
- The function defined in (23) has the following properties.
- (2a)
- , .
- (2b)
- The function strictly increases in and strictly decreases in ; the function has a unique global maximum point .
- 3.
- for every positive r.
5. Existence and Multiplicity of Positive Solutions
5.1. Application of the Krasnosel’skiĭ–Guo Cone Expansion/Contraction Theorem
5.2. Bifurcation Analysis
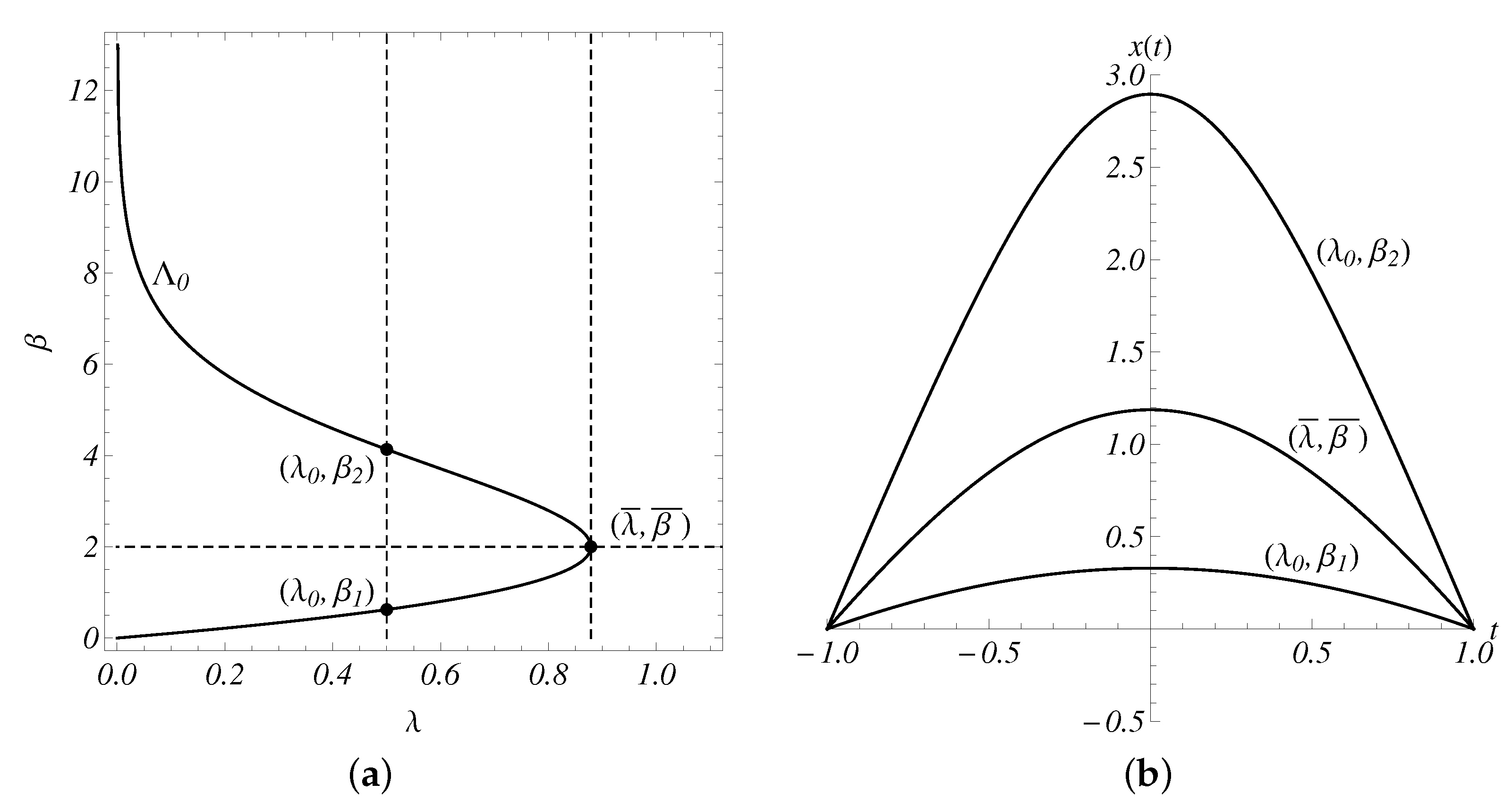
5.2.1. Parameter Is Zero
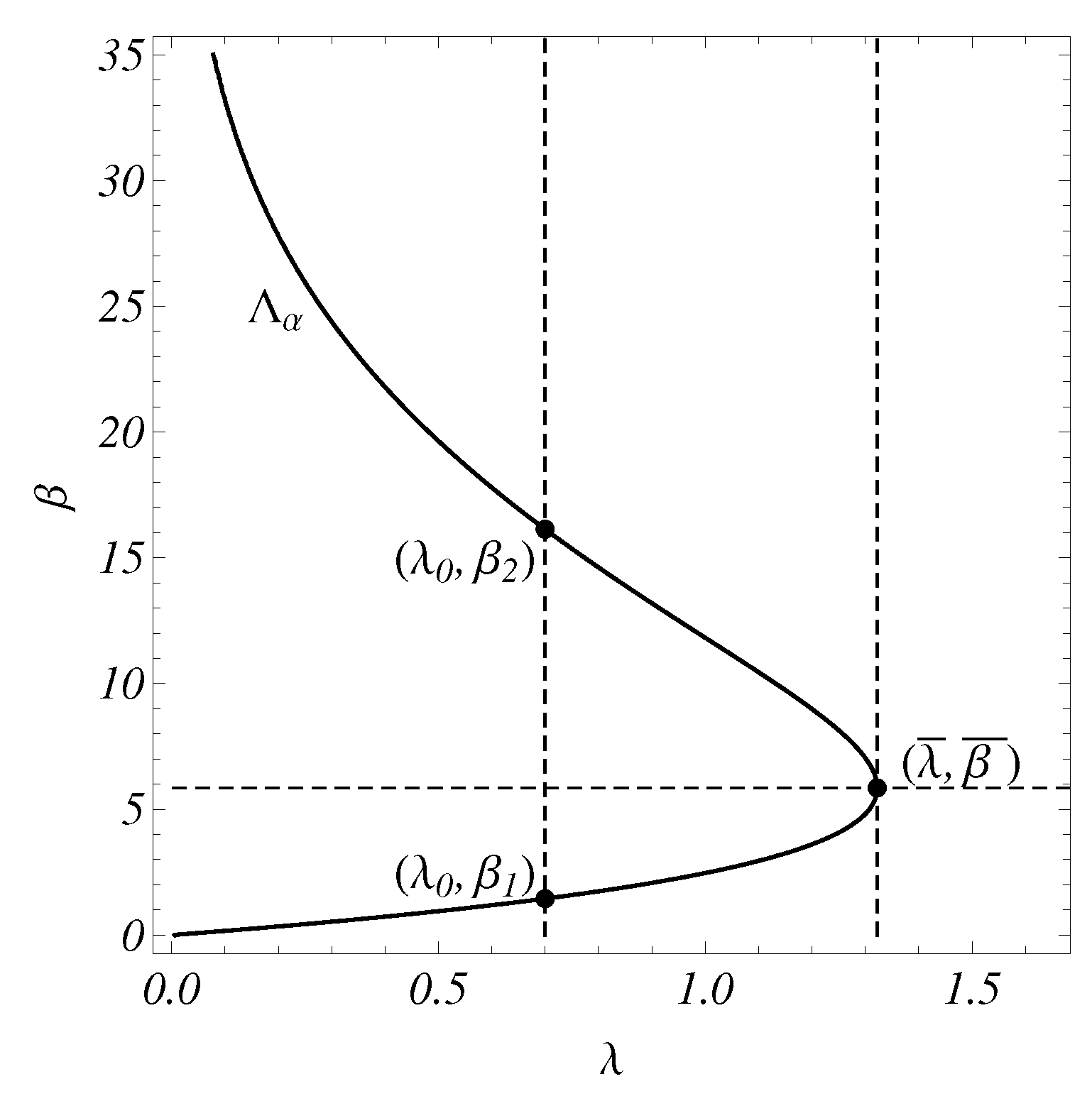
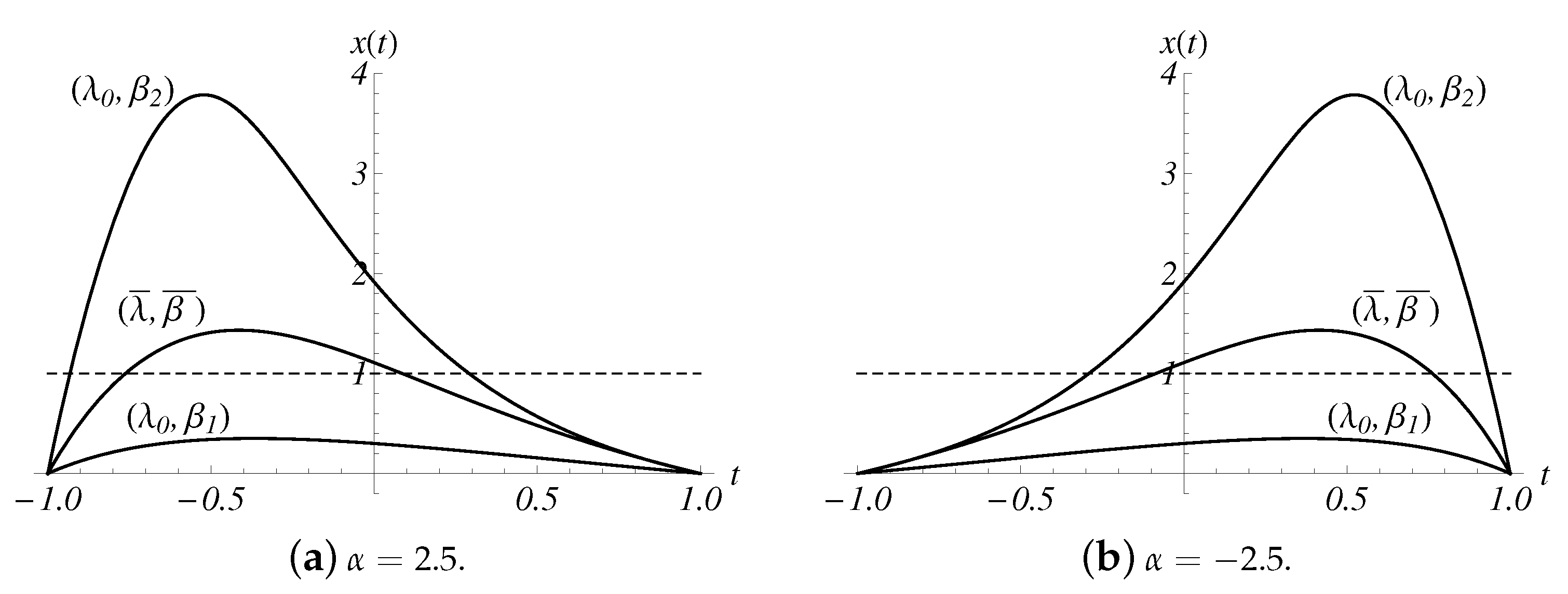
5.2.2. Parameter Is Nonzero
5.3. Parameter Analysis
6. Linear Stability Analysis
7. Numerical Results
8. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




References
- Lewandowski, W.M.; Ryms, M.; Kosakowski, W. Thermal biomass conversion: A review. Processes 2020, 8, 516. [Google Scholar] [CrossRef]
- Barmina, I.; Valdmanis, R.; Zake, M. The effects of biomass co-gasification and co-firing on the development of combustion dynamics. Energy 2018, 146, 4–12. [Google Scholar] [CrossRef]
- Barmina, I.; Dzenis, M.; Valdmanis, R.; Zake, M. Thermochemical conversion of microwave pre-treated biomass pellets: Combustion of activated pellets. Chem. Eng. Trans. 2021, 86, 103–108. [Google Scholar]
- Banerjee, A.; Paul, D. Developments and applications of porous medium combustion: A recent review. Energy 2021, 221, 119868. [Google Scholar] [CrossRef]
- Stöcker, M. Biofuels and biomass-to-liquid fuels in the bio-refinery: Catalytic conversion of lignocellulosic biomass using porous materials. Angew. Chem. Int. Ed. 2008, 47, 9200–9211. [Google Scholar] [CrossRef] [PubMed]
- Wronski, S.; Molga, E.; Rudniak, L. Dynamic filtration in biotechnology. Bioprocess Eng. 1989, 4, 99–104. [Google Scholar] [CrossRef]
- Li, N.N.; Fane, A.G.; Ho, W.W.; Matsuura, T. Advanced Membrane Technology and Applications; Wiley: New York, NY, USA, 2011. [Google Scholar]
- Herterich, J.G.; Hu, Q.; Field, R.W.; Vella, D.; Griffiths, I.M. Optimizing the operation of a direct-flow flitration device. J. Eng. Math. 2017, 104, 195–211. [Google Scholar] [CrossRef]
- Luo, Z.; Zhou, J. Thermal conversion of biomass. In Handbook on Climate Change Mitigation; Springer: New York, NY, USA, 2012; pp. 1001–1042. [Google Scholar]
- Drazin, P.G.; Reid, W.H. Hydrodynamic Stability; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Schmid, P.G.; Henningson, D.S. Stability and Transition in Shear Flows; Springer: New York, NY, USA, 2001. [Google Scholar]
- Hudoba, A.; Molokov, S. Linear stability of buoyant convective flow in a vertical channel with internal heat sources and a transverse magnetic field. Phys. Fluids 2016, 28, 114103. [Google Scholar] [CrossRef]
- Richard, Y. Physics of mantle convection. In Treatise of Geophysics; Elsevier: New York, NY, USA, 2015; Volume 7, pp. 23–71. [Google Scholar]
- Gershuni, G.Z.; Zhukhovitskii, E.M.; Iakimov, A.A. Two kinds of instability of stationary convective motion induced by internal heat sources. J. Appl. Math. Mech. 1973, 37, 544–548. [Google Scholar] [CrossRef]
- Takashima, M. The stability of natural convection in a vertical fluid layer with internal heat generation. J. Phys. Soc. Jpn. 1983, 52, 2364–2370. [Google Scholar] [CrossRef]
- Takashima, M. The stability of natural convection due to internal heat sources in a vertical fluid layer. Fluid Dyn. Res. 1990, 6, 15–23. [Google Scholar]
- Rogers, B.B.; Yao, L.S. The importance of Prandtl number for mixed-convection instability. Trans. ASME C J. Heat Transf. 1993, 115, 482–486. [Google Scholar] [CrossRef]
- Kolyshkin, A.A.; Vaillancourt, R. Stability of internally generated thermal convection in a tall vertical annulus. Can. J. Phys. 1991, 69, 743–748. [Google Scholar] [CrossRef]
- Kolyshkin, A.; Koliskina, V. Stability of a convective flow in a pipe caused by internal heat generation. JP J. Heat Mass Transf. 2018, 15, 515–530. [Google Scholar] [CrossRef]
- Shankar, B.M.; Kumar, J.; Shivakumara, I.S. Stability of mixed convection in a differentially heated vertical fluid layer with internal heat sources. Fluid Dyn. Res. 2019, 51, 055501. [Google Scholar] [CrossRef]
- Eremin, E.A. Stability of steady plane-parallel convective motion of a chemically active medium. Fluid Dyn. 1983, 18, 439–441. [Google Scholar] [CrossRef]
- Iltins, I.; Iltina, M.; Kolyshkin, A.; Koliskina, V. Linear stability of a convective flow in an annulus with a nonlinear heat source. JP J. Heat Mass Transf. 2019, 18, 315–329. [Google Scholar] [CrossRef]
- Gritsans, A.; Koliskina, V.; Kolyshkin, A.; Sadyrbaev, F. Linear stability of a combined convective flow in an annulus. Fluids 2023, 8, 130. [Google Scholar] [CrossRef]
- Zhang, X.; Lei, H.; Zhu, L.; Zhu, X.; Qian, M.; Yadavalli, G.; Wu, J.; Chen, S. Thermal behavior and kineric study for catalytic co-pyrolysis of biomass with plastics. Bioresour. Technol. 2016, 220, 233–238. [Google Scholar] [CrossRef]
- Zhang, X.; Lei, H.; Liu, J.; Bu, Q. Thermal decomposition behavior and kinetics for pyrolysis and catalytic pyrolysis of Douglas fir. RSC Adv. 2018, 8, 2196–2202. [Google Scholar]
- Boussinesq, J. Théory Analytique de la Chaleur; Gauthier-Villars: Paris, France, 1903. [Google Scholar]
- Spiegel, E.A.; Veronis, G. On the Boussinesq approximation for a compressible fluid. Astrophys. J. 1960, 131, 442–447. [Google Scholar] [CrossRef]
- Mihailjan, J.M. A rigorous exposition of the Boussinesq approximation applicable to a thin layer of luid. Astrophys. J. 1962, 136, 1126–1133. [Google Scholar] [CrossRef]
- Gershuni, G.Z.; Zhukhovitskii, E.M. Convective Stability of Incompressible Fluids; Ketter Publications: Jerusalem, Israel, 1976. [Google Scholar]
- Gray, D.D.; Giorgini, A. The validity of the Boussinesq approximation for liquids and gases. Int. J. Heat Mass Transf. 1976, 19, 545–551. [Google Scholar] [CrossRef]
- Barletta, A.; Celli, M.; Rees, D.A.S. The use and misuse of the Oberbeck-Boussinesq approximation. Physics 2023, 5, 298–309. [Google Scholar] [CrossRef]
- Mizerski, K.A. The Oberbeck-Boussinesq approximation, In Foundations of Convection with Density Stratification; Springer: New York, NY, USA, 2021; pp. 21–85. [Google Scholar]
- Mayeli, P.; Sheard, G.J. Buoyancy-driven flows beyond the Boussinesq approximation: A brief review. Int. Commun. Heat Mass Transf. 2021, 125, 105316. [Google Scholar] [CrossRef]
- Frank-Kamenetskii, D.A. Diffusion and Heat Exchange in Chemical Kinetics; Princeton: Princeton, NJ, USA, 1955. [Google Scholar]
- Zeldovich, Y.B.; Barenblatt, G.I.; Librovich, V.B.; Makhviladze, G.M. The Mathematical Theory of Combustion and Explosions; Springer: New York, NY, USA, 1985. [Google Scholar]
- White, D., Jr.; Johns, L.E. The Frank-Kamenetskii transformation. Chem. Eng. Sci. 1987, 42, 1849–1851. [Google Scholar] [CrossRef]
- Ershkov, S.; Prosviryakov, E.; Leshchenko, D. Exact solutions for isobaric inhomogeneous Couette flows of a vertically swirling fluid. J. Appl. Comput. Mech. 2023, 9, 521–528. [Google Scholar]
- Shapeev, V.P.; Sidorov, A.F.; Yanenko, N.N. Methods of Differential Constraints and Its Applications in Gas Dynamics; Nauka: Novosibirsk, Russia, 1984. (In Russian) [Google Scholar]
- El Moutaouakil, L.; Boukendil, M.; Hidki, R.; Charqui, Z.; Zrikem, Z.; Abdelbaki, A. Analytical solution for natural convection of a heat-generating fluid in a vertical rectangular cavity with two pairs of heat source/sink. Therm. Sci. Eng. Prog. 2023, 40, 101738. [Google Scholar] [CrossRef]
- Korobkov, M.V.; Pileckas, K.; Pukhnachov, V.V.; Russo, R. The flux problem for the Navier-Stokes equations. Russ. Math. Surv. 2014, 69, 1065–1122. [Google Scholar] [CrossRef]
- Cabada, A.; Cid, J.Á.; Máquez-Villamarín, B. Computation of Green’s functions for boundary value problems with Mathematica. Appl. Math. Comput. 2012, 219, 1919–1936. [Google Scholar] [CrossRef]
- Infante, G. A short course on positive solutions of systems of ODEs via fixed point index. arXiv 2017, arXiv:1306.4875. [Google Scholar]
- Guo, D.; Lakshmikantham, V. Nonlinear Problems in Abstract Cones; Academic Press, Inc.: Boston, MA, USA, 1988. [Google Scholar]
- Precup, R. Methods in Nonlinear Integral Equations; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2002. [Google Scholar]
- Samuilik, I.; Sadyrbaev, F. On a system without critical points arising in heat conductivity theory. WSEAS Trans. Heat Mass Transf. 2022, 17, 151–160. [Google Scholar] [CrossRef]
- Huang, S.-Y.; Wang, S.-H. Proof of a conjecture for the one-dimensional perturbed Gelfand problem from combustion theory. Arch. Ration. Mech. Anal. 2016, 222, 769–825. [Google Scholar] [CrossRef]
- Korman, P.; Li, Y. Generalized averages for solutions of two-point Dirichlet problems. J. Math. Anal. Appl. 1999, 239, 478–484. [Google Scholar] [CrossRef][Green Version]
- Bebernes, J.; Eberly, D. Mathematical Problems from Combustion Theory; Springer: New York, NY, USA, 1989. [Google Scholar]
- Istratov, A.G.; Librovich, V.B. On the stability of the solutions in the steady theory of a thermal explosion. J. Appl. Math. Mech. 1963, 27, 504–512. [Google Scholar] [CrossRef]
- Gershuni, G.Z.; Zhukhovitskii, E.M.; Yakimov, A.A. On stability of plane-parallel convective motion due to internal heat sources. Int. J. Heat Mass Transf. 1974, 17, 717–726. [Google Scholar] [CrossRef]
- Canuto, C.; Quarteroni, A.; Hussaini, M.Y.; Zang, T.A. Spectral Methods. Evolution to Complex Geometries and Applications to Fluid Dynamics; Springer: New York, NY, USA, 2007. [Google Scholar]
- Heinrichs, W. Improved condition number for spectral methods. Math. Comp. 1989, 53, 103–119. [Google Scholar] [CrossRef]
- Don, W.S.; Solomonoff, A. Accuracy and speed in computing the Chebyshev collocation derivative. SIAM J. Sci. Comp. 1995, 16, 1253–1268. [Google Scholar] [CrossRef]
- Kolyshkin, A.; Koliskina, V. On the stability of the flow in a vertical fluid layer with permeable boundaries caused by a nonlinear heat source. In Proceedings of the 7th International Conference Integrity-Reliability-Failure; Gomes, J.F.S., Meguid, S.A., Eds.; Inegi-Inst Engenharia Mecanica E Gestao Industrial: Porto, Portugal, 2020; pp. 611–612. [Google Scholar]
- Abricka, M.; Barmina, I.; Suzdalenko, V.; Zake, M. Combustion dynamics at biomass thermochemical conversion downstream of integrated gasifier and combustor. In Proceedings of the 12th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 23–24 May 2013; pp. 638–642. [Google Scholar]
- Martinand, D.; Serre, E.; Lueptow, R.M. Linear and weakly nonlinear analyses of cylindrical Couette flow with axial and radial flows. J. Fluid Mech. 2017, 824, 438–476. [Google Scholar] [CrossRef]
- Suslov, S.A.; Paolucci, S. Stability of non-Boussinesq convection via the complex Ginzburg-Landau model. Fluid Dyn. Res. 2004, 35, 159–203. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | |
|---|---|
| 30 | 11,157.351253 |
| 40 | 11,157.569064 |
| 50 | 11,157.811295 |
| 60 | 11,157.624778 |
| 70 | 11,157.625483 |
| 80 | 11,157.625661 |
| 90 | 11,157.649458 |
| 100 | 11,157.639824 |
| 110 | 11,157.650583 |
| 120 | 11,157.640381 |
| 130 | 11,157.632748 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gritsans, A.; Kolyshkin, A.; Sadyrbaev, F.; Yermachenko, I. On the Stability of a Convective Flow with Nonlinear Heat Sources. Mathematics 2023, 11, 3895. https://doi.org/10.3390/math11183895
Gritsans A, Kolyshkin A, Sadyrbaev F, Yermachenko I. On the Stability of a Convective Flow with Nonlinear Heat Sources. Mathematics. 2023; 11(18):3895. https://doi.org/10.3390/math11183895
Chicago/Turabian StyleGritsans, Armands, Andrei Kolyshkin, Felix Sadyrbaev, and Inara Yermachenko. 2023. "On the Stability of a Convective Flow with Nonlinear Heat Sources" Mathematics 11, no. 18: 3895. https://doi.org/10.3390/math11183895
APA StyleGritsans, A., Kolyshkin, A., Sadyrbaev, F., & Yermachenko, I. (2023). On the Stability of a Convective Flow with Nonlinear Heat Sources. Mathematics, 11(18), 3895. https://doi.org/10.3390/math11183895