1. Introduction
This article focuses on the sufficient conditions that must be present from nonlinearities in order to be able to discuss, depending on the parameters, the existence and non-existence of solutions for second-order systems of the type
for
, where
,
are continuous functions and
are real parameters, along with the boundary conditions
where
such that
and
A multiplicity of solutions will be obtained for a particular case of (
1) and (
2), that is,
for
, where
, with the boundary conditions
These types of equations were introduced in [
1], and since then, they have been studied by many authors in the context of different types of boundary value problems. As examples, we refer to [
2,
3] for three-point and two-point boundary value problems; ref. [
4,
5] for Neumann boundary conditions; ref. [
6,
7,
8,
9,
10] for periodic problems; ref. [
11] for parametric problems with
-Laplacian equations; ref. [
12] for asymptotic conditions; and [
13] for coercivity conditions.
Common to all of these problems is the discussion of the so-called Ambrosetti–Prodi alternative, in which there are some values, and of a parameter such that the problem has no solution for , at least one solution if or two solutions if
Coupled systems of second-order differential equations, where there is dependence between the various unknown variables, were studied in a huge variety of theoretical and applied situations involving different types of boundary conditions, such as [
14,
15,
16,
17]. Moreover, there are many real phenomena modeled by coupled systems, particularly in problems related to population dynamics, as in [
18,
19,
20,
21].
Recently, in [
22], the authors presented a technique to discuss the existence of coupled systems of two Ambrosetti–Prodi-type second-order fully differential equations and proved the existence of solutions for the values of the parameters for which there are lower and upper solutions for the system.
This paper extends, for the first time, as far as we know, the Ambrosetti–Prodi alternative to coupled systems of differential equations with two parameters. The existence and nonexistence of solutions are obtained for Problems (
1) and (
2), and a discussion of multiplicity for particular cases of the boundary conditions are considered in [
22].
Our method relies on the lower and upper solutions technique together with a Nagumo condition to estimate the values of the first derivatives. Leray–Schauder topological degree properties play a key role in obtaining the multiplicity of solutions. As is usual in this type of method, the results also provide the localization for such solutions in a strip bounded by lower and upper solutions. This feature is particularly useful in practice, particularly in the application of these theorems to the study of population dynamics and namely to Lotka–Volterra steady-state systems with migration, as we show in the last section.
The paper is organized as follows.
Section 2 contains definitions and some auxiliary results, such as the a priori Nagumo estimation for the first derivatives and a previous result used in the main results. The third and fourth sections provide a discussion of the two parameters for the existence and multiplicity of solutions, respectively. The last section presents an application for studying the interactions between two species under two scenarios: mutualism and neutralism.
2. Definitions and Auxiliary Results
In this section, some definitions, lemmas, and theorems are introduced for the subsequent analysis.
Let
be the usual Banach space equipped with the norm
, defined by
where
and let
with the norm
The Nagumo condition, introduced by [
23], establishes an a priori estimation for the first derivative of the solution of System (
1), provided that it satisfies an adequate framework.
Definition 1. Let be continuous functions such thatand consider the set A continuous function satisfies a Nagumo-type condition in the set (6) if there is a continuous positive function satisfyingsuch that The a priori estimate for the first derivatives is given by the next lemma following the arguments of [
22].
Lemma 1. Suppose that the continuous functions satisfy the Nagumo-type Conditions (7) and (8) in S. Then, for every solution of (1) satisfyingthere are and such that Remark 1. The constant depends only on the parameter μ and on the functions and Analogously, depends only on and However, if the parameters μ and λ belong to bounded sets, and can be taken independently of μ and λ.
To apply the lower and upper solutions method, depending on the values of the parameters and , we take the followings coupled functions.
Definition 2. Let such that and for .
A pair of functions is a lower solution of Problems (1) and (2) if, for all ,and, for , A pair of functions is an upper solution of Problems (1) and (2) if, for all ,and, for , The first theorem is an existence and localization result that is a particular case of Theorem 3.1 of [
22]. In short, it guarantees the existence of a solution for the values of
and
such that there are lower and upper solutions of Problems (
1) and (
2).
Theorem 1. Let be continuous functions. If there are lower and upper solutions of (1) and (2), and , respectively, according to Definition 2, such thatand f and g satisfy Nagumo conditions as in Definition 1 relative to the intervals and for all withfor we haveand withfor we have Then there is at least , a paired solution of (1) and (2), and, moreover, 3. Existence and Non-Existence of Solutions
A preliminary discussion of the values of the parameters
and
, for which it is possible to guarantee the existence and non-existence of a solution for System (
1) with the boundary Condition (
2), is given by the next theorem.
Theorem 2. Let be continuous functions fulfilling the conditions of Theorem 1. If we have , , and such that satisfyfor every , and andfor every , and then there exist and (with the possibility of and ) such that: - 1.
If or , there is no solution to (1) or (2); - 2.
If and , then there is at least one solution to (1) and (2).
Proof. Claim 1:
There exist and such that (1) and (2) have a solution for and .
Defining
there are
such that
and
for all
.
Then, the functions
and
are upper solutions of Problems (
1) and (
2) for
and
. On the other hand,
and
are lower solutions of Problems (
1) and (
2) for
and
since, by (
18) and the boundary conditions, we have
,
,
,
.
As
f and
g satisfy the Nagumo conditions on the set
then, by Theorem 1, there exists at least one solution of Problems (
1) and (
2) for
and
.
Claim 2:
If (1) and (2) have a solution for and , then they have a solution for ,
and .
Let
be a solution of Problems (
1) and (
2) for
and let
that is,
The pair of functions
is an upper solution of (
1) and (
2) for values of
and
such that
and
since
and
when the boundary conditions are trivially checked.
For
and
, as defined in (
23) and (
24), consider values of
and
large enough such that
Then,
is a lower solution of Problems (
1) and (
2) for
and
since, by (
18) and the boundary conditions, we have
,
,
,
.
To apply Theorem 1, it remains to justify that
Assume, by contradiction, that the first inequality is not satisfied. Then, there exists
such that
, and we can define
By (
20),
,
, and, by (
18), we obtain the contradiction
Then, for all
Using a similar method, by (
19), it can be shown that
for all
.
Therefore, by Theorem 1, there exists at least one solution
of Problems (
1) and (
2) for values of
and
such that
and
.
For
or
, (1) and (2) have no solution; for
and
, (1) and (2) have at least one solution. Consider the set
with the order relationship given by
The set
is not empty because, by Claim 1,
, and we can thus define
If (
1) and (
2) have a solution for all
and
then
and
.
By Claim 1 and (
22),
and
. By Claim 2, (
1) and (
2) have at least one solution for values of
and
such that
and
. □
Replacing
f,
g,
, and
with
,
,
, and
, respectively, in Conditions (
18) and (
19), we obtain a dual version of the previous theorem, whose proof follows the same type of arguments.
Theorem 3. Let be continuous functions fulfilling the assumptions of Theorem 1.
If there are , , and that satisfyfor every and for every , and , then there exists and (with the possibility of and ) such that the following hold true: - 1.
If or , (1) and (2) have no solution; - 2.
If and , (1) and (2) have at least one solution.
4. Multiplicity of Solutions
The multiplicity result is obtained for a particular case of Problems (
1) and (
2), namely, a standard system where the differential equations are independent with
.
The arguments are based on the topological Leray–Schauder degree, along with strict lower and upper solutions, as in the next definition.
Definition 3. - i.
A pair of functions is a strict lower solution of Problems (3) and (4) if, for all , - ii.
A pair of functions is a strict upper solution of Problems (3) and (4) if, for all ,
For the functional framework, we define the operators
given by
and
given by
as
and
Since
is invertible, we can define the completely continuous operator
given by
Clearly, the operator is compact, and the following lemma allows us to evaluate the topological degree, .
Lemma 2. Assume that there are strict lower and upper solutions of (3) and (4), , respectively, withwhere the continuous functions satisfy the Nagumo conditions as in Definition 1 relative to the intervals and . Then, there is such that, forwe have Remark 2. By Remark 1, it is possible to consider the same set Ω
for Equation (3) regardless of μ and λ, provided that and are strict lower and upper solutions of (3) and (4) and belongs to a bounded set. Proof. Consider the truncated functions
,
,
For
consider the homotopic, truncated, and perturbed problem composed by the system
and the boundary Condition (
4).
With these definitions, Problems (
31) and (
4) are equivalent to the operator equation
For
, take
such that, for every
,
By Lemma 1, and applying the technique suggested in the proof of Theorem 1 (see [
22], Theorem 3.1) adapted to strict lower and upper solutions
, there are positive real numbers
where
such that
independently of the parameters
and
.
If we define
then every solution of (
32) belongs to
for all
, and, so, the degree
is well-defined for every
For
the equation
that is, the homogeneous linear problems
admits only the null solution. Then, by degree theory,
and by the homotopy invariance
Therefore, Problems (
31) and (
4) have, at least, a solution
for
Let us prove that
Assume, by contradiction, that there is
such that
and define
By (
4) and (
26),
and
Therefore, by (
16), we have the contradiction
Therefore, for all
As the other inequalities can be obtained by similar arguments, we have
and, therefore,
.
and, by (
34) and the excision property of degree theory, we have
□
Remark 3. We remark that, from (30), if is a solution of Problems (31) and (4), then it is a solution of (3) and (4) as well. The multiplicity result requires extra assumptions for the nonlinearities.
Theorem 4. Let be continuous functions such that there are , , and that satisfyfor every for every andfor all Assume that there are with and such that every solution of (3) and (4) with and satisfiesand there exist , such thatfor andfor Thus, the numbers , and given by Theorem 2, are finite, and the following are true:
- 1.
If or , there is no solution to Problems (3) and (4); - 2.
If and , there is at least one solution to Problems (3) and (4); - 3.
If and , there are at least two solutions to Problems (3) and (4).
Proof. Claim 1: Every solutionof Problems (3) and (4) for satisfies By (
39), it will suffice to prove that any solution
of (
3) and (
4) with
satisfies
Assume, by contradiction, that there is
such that
and define
By (
4),
, and, therefore,
By (
36), the following contradiction holds:
Therefore,
and, by (
37) and similar arguments, it can be proved that
If, by contradiction,
and
then, by Theorem 2, Problems (
3) and (
4) have a solution for any values of
and
such that
and
.
Let
be a solution of (
3) and (
4) for
and
.
Define
and consider a
small enough such that
By (
4), there is
such that
.
Choose or such that for .
In the first case,
and the following contradiction with (
39) holds:
If
, then
and, following the same technique, an analogous contradiction is obtained. Therefore,
is finite.
Analogously, it can be shown that is finite.
Claim 3:
Forthere is a second solution of (3) and (4).
As both
and
are finite, by Theorem 2, there exist
or
such that (
3) and (
4) have no solution for
or
.
In the first case, by Lemma 1 and Remark 1, it is possible to consider
that is large enough such that the estimation
holds for every solution
of (
3) and (
4), where
or
.
Together with the linear operator
, given by (
29), we define the nonlinear operator
by
and we define the completely continuous operator
given by
By the definition of
and Claim 1, the degree
is well-defined for every
and, by degree theory,
Therefore, for the homotopy
on the parameters
given by
it is clear that the degree
is well-defined for every
and
.
By the invariance under homotopy,
for
.
Take
and let
be a solution of (
3) and (
4) with
which exists by Theorem 2.
By Claim 1 and (
43), it is possible to consider
such that
For the functions given by
the pair
is a strict upper solution of (
3) and (
4) for
and
as we have
Analogously, it can be proven that
Moreover, the pair
is a strict lower solution of (
3) and (
4) for
and
as, by (
36) and (
37),
By Lemma 1 and Remark 2, there is
independent of
and
such that for the set
we have the degree
Assuming, in (
44), there is
large enough such that, by (
46),
then, by (
45) and (
47) and the additivity property of the degree,
Then, for
Problems (
3) and (
4) have at least two solutions: a solution in
and another one in
since
is arbitrary in
Claim 4:
For Problems (3) and (4) have at least one solution.
Consider the sequence such that lim and lim
By Theorem 2, for each
Problems (
3) and (
4) have, at least, a solution
From the estimations given in Claim 1 and (
43),
and by Lemma 1, there is a
sufficiently large such that
independently of
n. Then, the sequence
is bounded in
and, by the Arzèla–Ascoli theorem, there is a subsequence of
that converges in
to a solution
of (
3) and (
4) for
. □
A dual version of Theorem 4 can be given, as below.
Theorem 5. Let be continuous functions such that there are , , and that satisfyfor every for every andfor all Assume that there are where with , and such that every solution of (3) and (4), where , and , satisfiesand there exist , where , such thatfor andfor Then numbers , and given by Theorem 3, are finite, and the following hold true:
- 1.
If or , there is no solution to Problems (3) and (4); - 2.
If , and , there is at least one solution to Problems (3) and (4); - 3.
If and , there are at least two solutions to Problems (3) and (4).
5. Application in a Lotka–Volterra Steady-State System with Migration
The Lotka–Volterra equations are often used to represent interactions between species. In their original version, they describe prey–predator competition models. However, there are many other types of interaction occurring between species, such as mutualism and neutralism. The study of population dynamics between two species can be considered the most elementary way to describe interspecific and introspecific interactions.
In [
24], the importance of including spatial dependence in the Lotka–Volterra equations is shown since the models depend only on time. These equations assume that the spatial distributions of populations are homogeneous, but in most biological systems, this assumption is not valid.
In this paper, we present a steady-state model of interactive Lotka–Volterra equations for two species, adapted from the works [
25,
26].
Consider the system of equations
with the boundary conditions
where
and
for
, with the following meanings:
and are the population density;
The first term in each equation is responsible for dispersion with species-specific diffusion ();
The second term corresponds to the intrinsic growth of the species, with coefficients representing the growth rate of the species;
is the intraspecific competition coefficient;
is the interspecific interaction coefficient;
and can be defined as physical and geographic conditions of the domain region favoring, or not, the development of a species;
The parameters and are the weight of attraction or repulsion of the terms and for the respective populations.
5.1. Interaction by Mutualism
Mutualism is an example of an interspecific ecological relationship that benefits all individuals involved in the interaction. In particular, the Lotka–Volterra model of mutualism is the case where the interaction coefficients
and
of Problems (
54) and (
55) are positive.
Consider a numerical example of (
54) and (
55), where
,
,
,
,
,
,
,
,
,
,
, and
Thus, we have the particular problem
with the boundary conditions
At and , the boundary conditions of zero density can be interpreted as an inhospitable region, which the species cannot inhabit.
The assumptions of Theorem 3 are satisfied for every
and, by (
23) and (
24), it is possible to give some estimations of the parameters
and
and
for some
p and
q such that
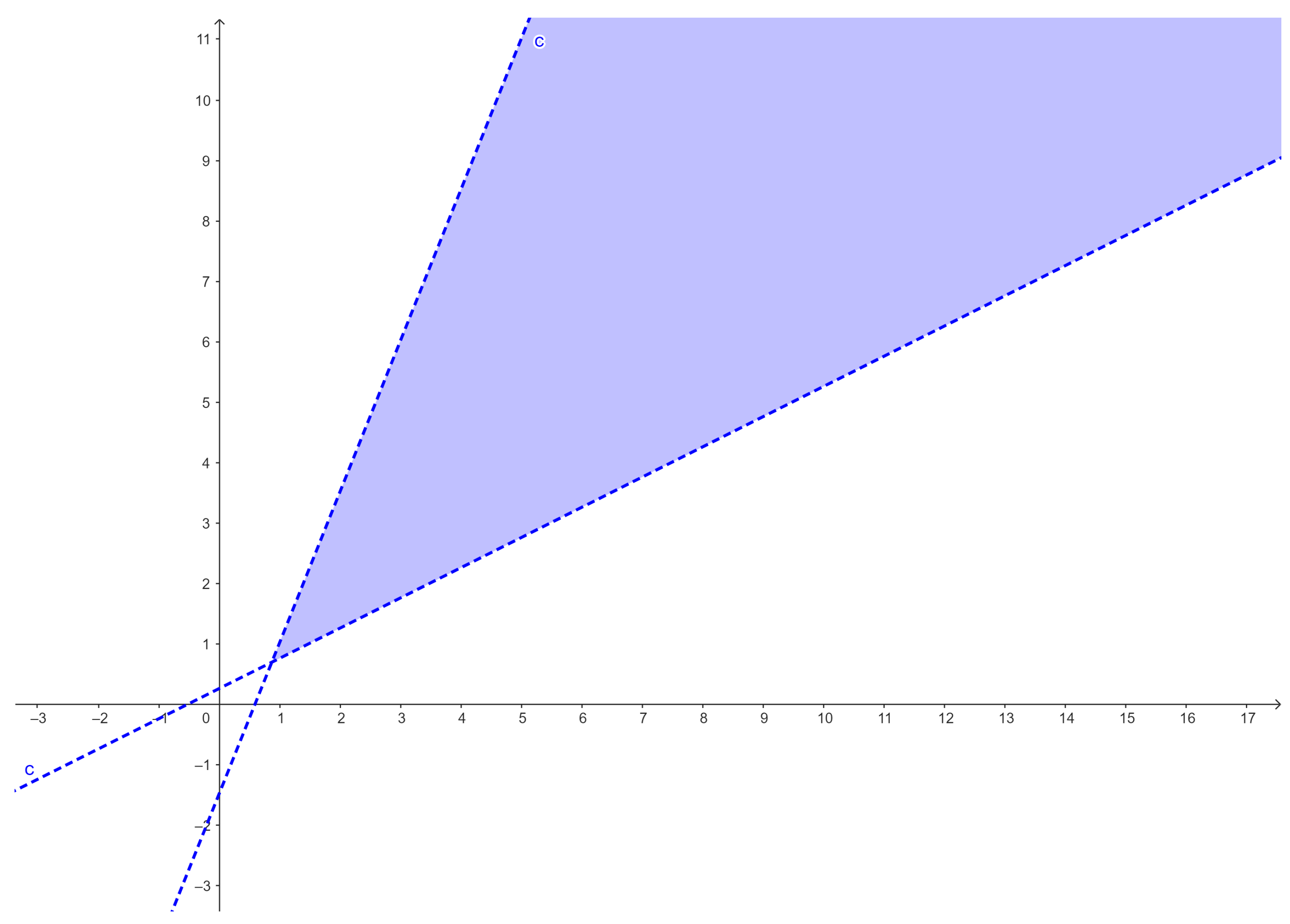
Figure 1 shows the region of points
calculated by GeoGebra Classic 6.0.794.0, where Condition (
58) holds.
By Definition 2, the functions
are, respectively, the lower and upper solutions of Problems (
56) and (
57) for
Moreover, Problems (
56) and (
57) are a particular case of (
1) and (
2), where
and
These functions satisfy the Nagumo Conditions (
7) and (
8), relative to the intervals
and
as
and, trivially,
Therefore, by Theorem 1, for the values of
and
fulfilling (
59), Problems (
56) and (
57) have at least one solution
such that
for all
.
Therefore, by Theorem 3, there are
and
such that Problems (
56) and (
57) have no solution for
or
and have at least one solution for
5.2. Interaction by Neutralism
Neutralism is an ecological relationship in which there is no interspecific interaction and the two species evolve independently, i.e., when both interaction parameters are null.
Consider in (
54)
and
. Consider also the numerical Problems (
56) and (
57) with the same values for the other parameters:
with boundary conditions
The assumptions (
48) and (
49) of Theorem 3 are satisfied for every
, and the estimations of the parameters are given by
and
Let
and
be real numbers. Then, the functions
are, respectively, strict lower and upper solutions of Problems (
60) and (
61) according to Definition 3 for
Moreover, Problems (
60) and (
61) are a particular case of (
3) and (
4), with
and
These functions satisfy the Nagumo Conditions (
7), and (
8) relative to the intervals
and
as
and, trivially,
Thus, by Theorem 1, for the values of
and
fulfilling (
62), Problems (
60) and (
61) have at least a solution
such that
for all
.
By Theorem 3, there are and such that there is no solution if or .




{kind=link}
