

Autonomous Trajectory Tracking and Collision Avoidance Design for Unmanned Surface Vessels: A Nonlinear Fuzzy Approach
Abstract
:1. Introduction
2. Problem Description and Design Objective
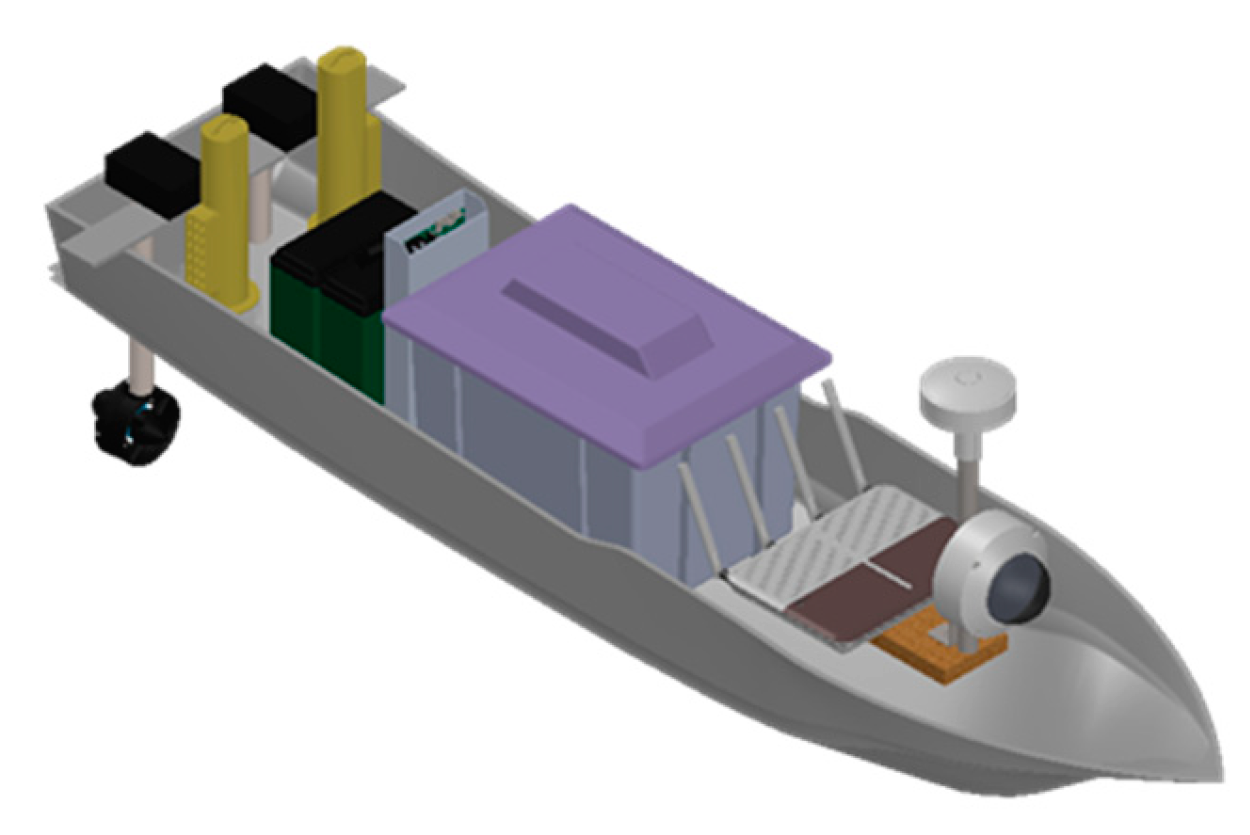
2.1. Intelligent Collision Avoidance Control System for USVs
- Phase 1:
- Related position and attitude acquisitions of the controlled USV and corresponding ships in the monitored area of the ocean.
- Phase 2:
- Intelligent collision risk evaluation and collision avoidance decision making.
- Phase 3:
- Real-time generation of a collision avoidance trajectory.
- Phase 4:
- Robust and precise trajectory tracking executed by the controlled USV.
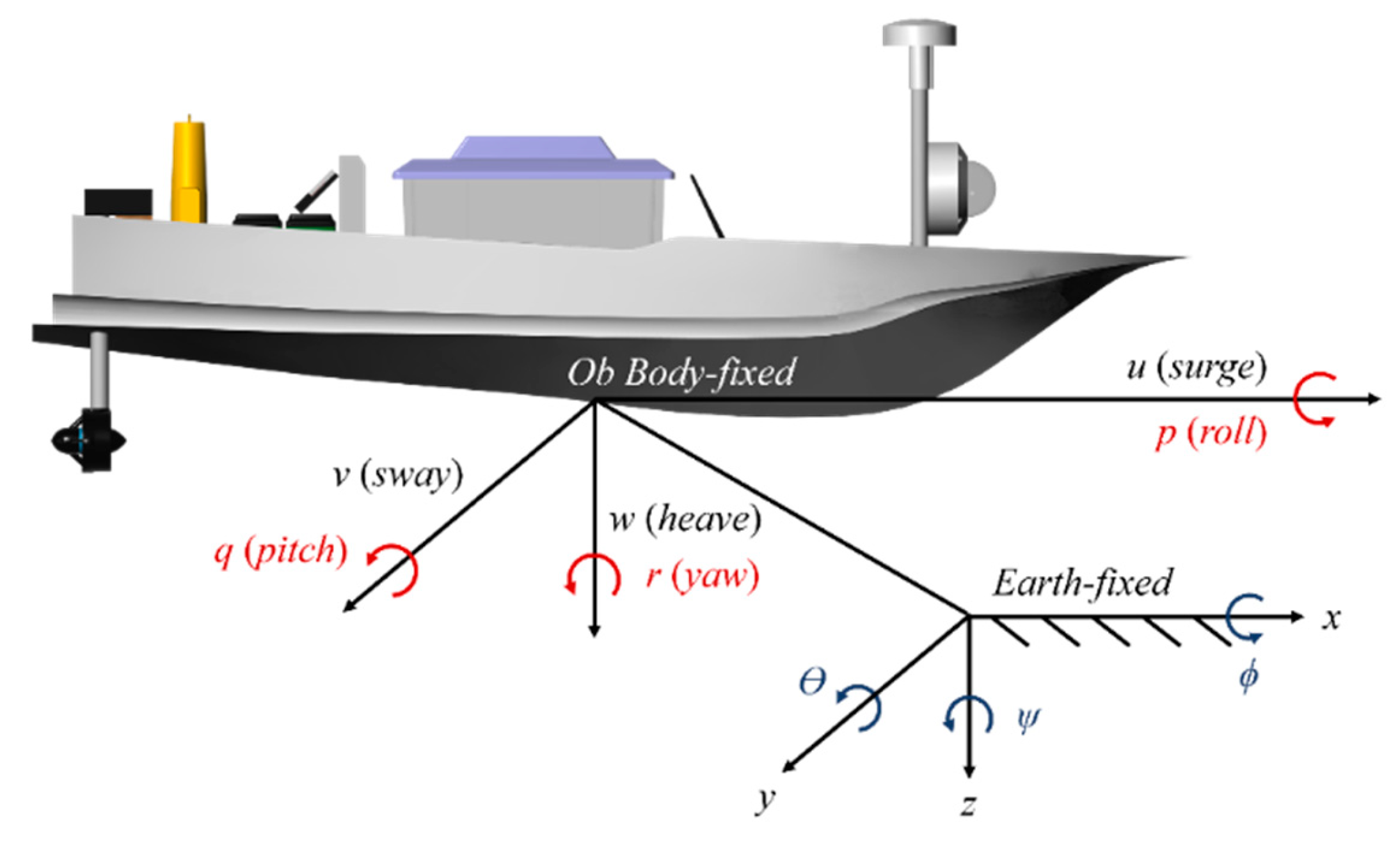
2.2. Governing Equations of USVs
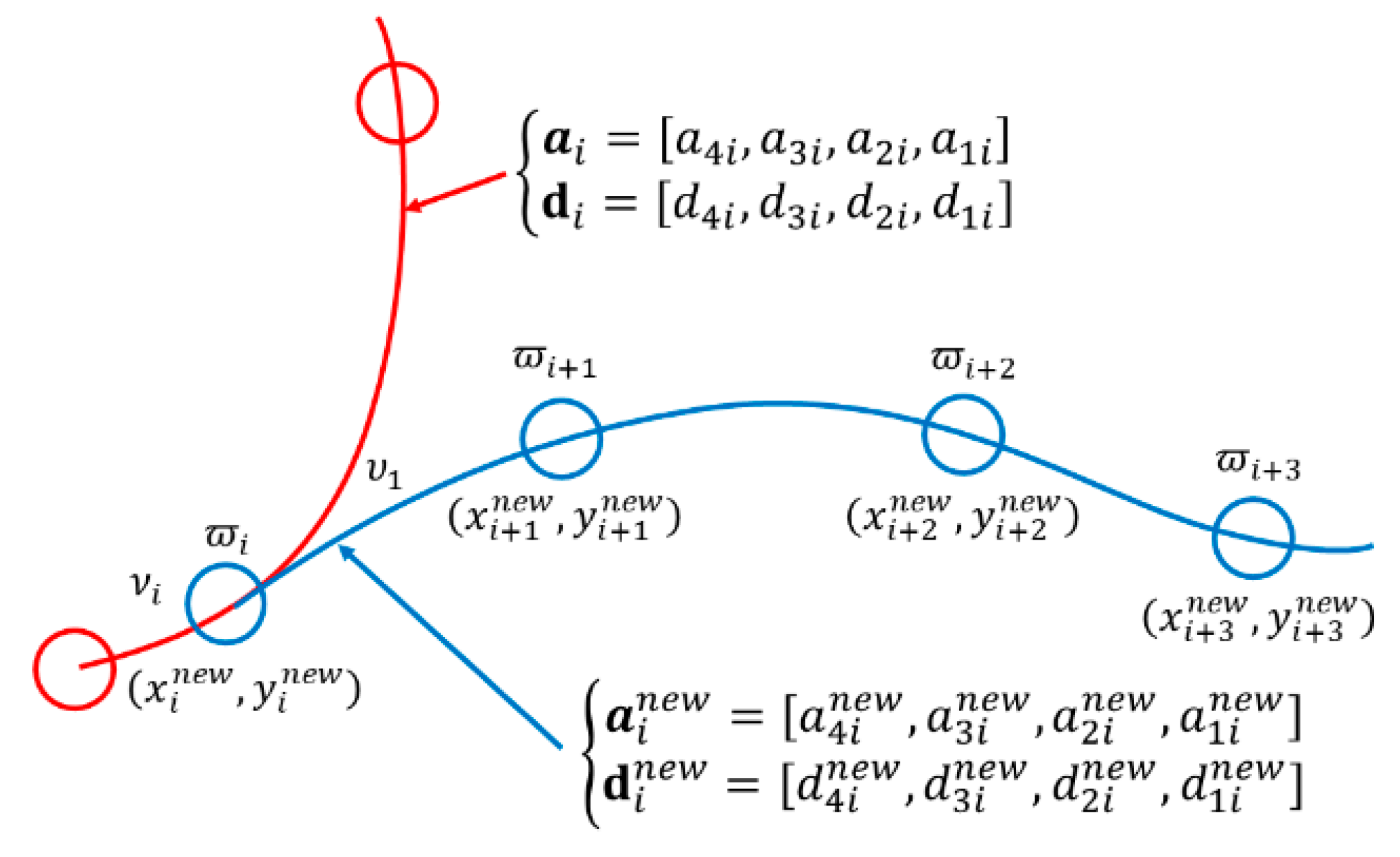
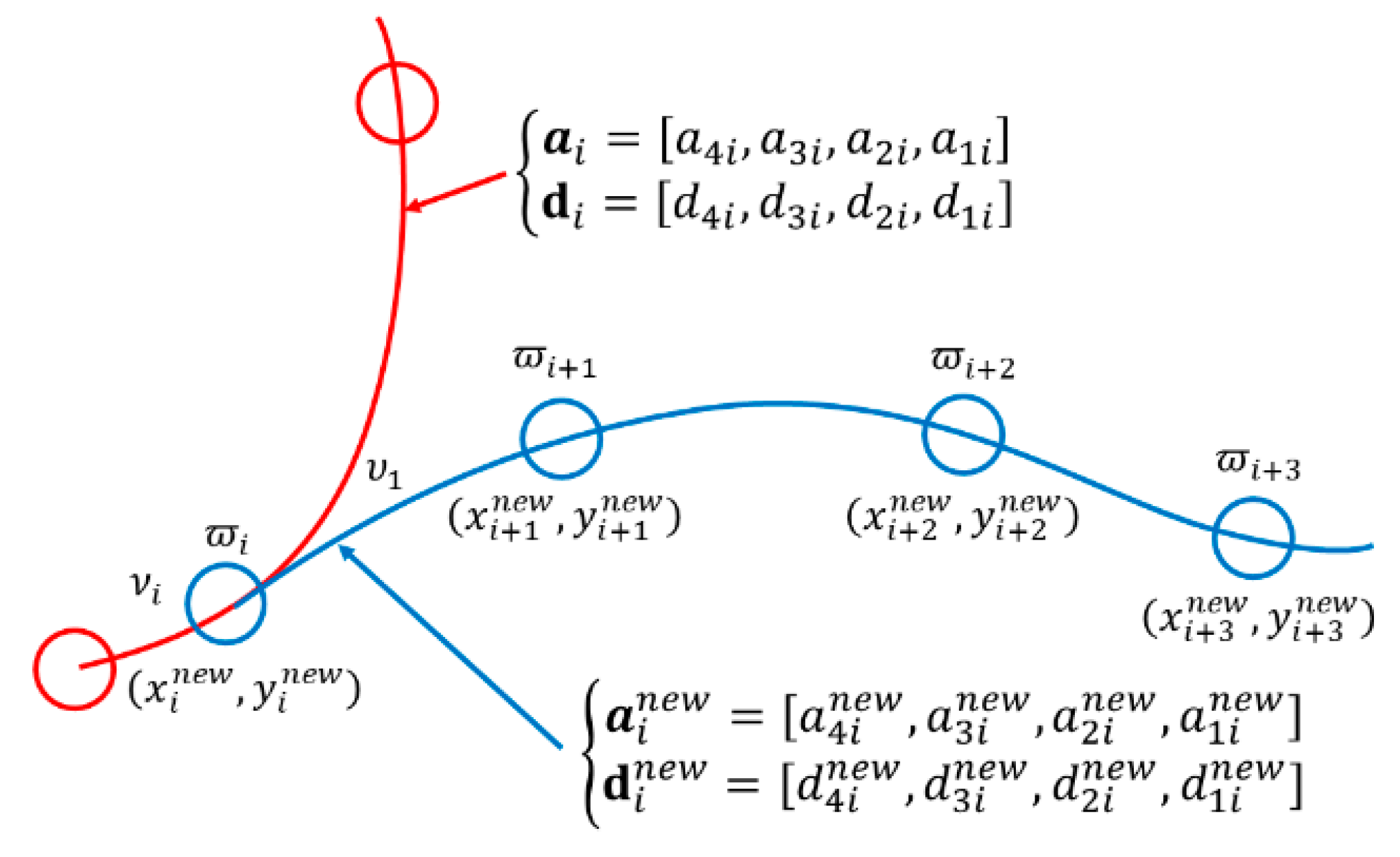
2.3. Generator of Collision-Free Trajectories
2.3.1. Integrated Fuzzy-Based Control System
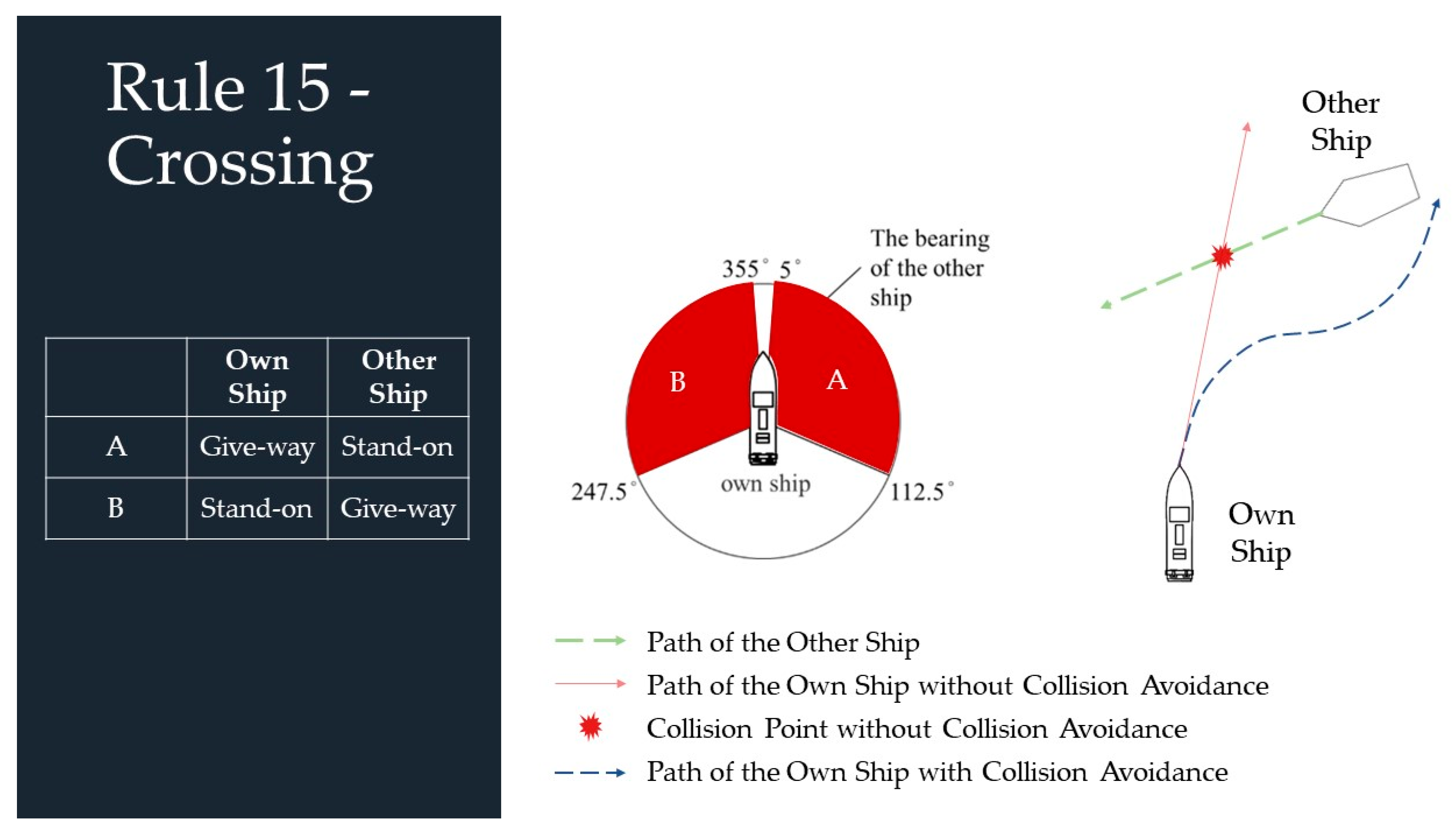
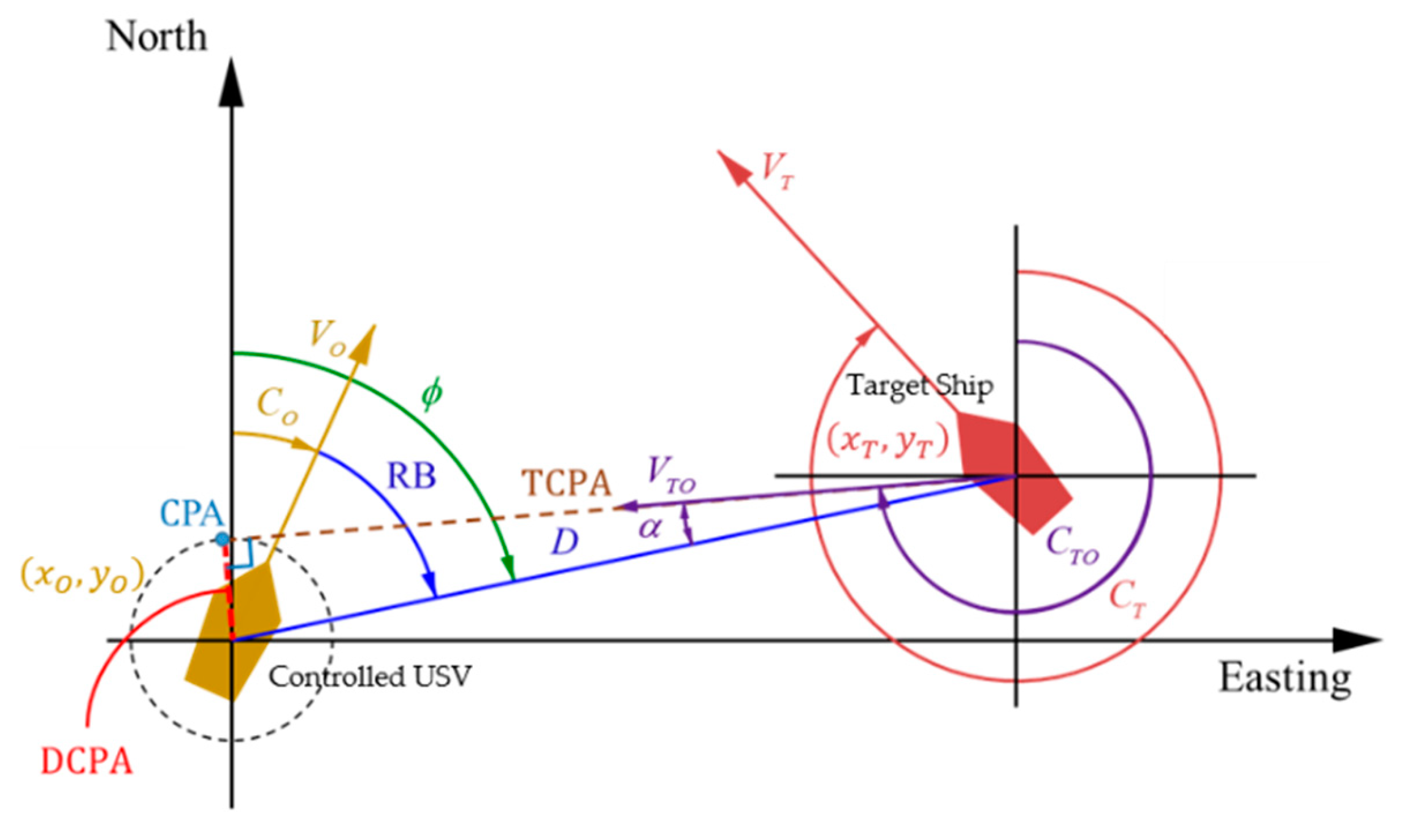
2.3.2. Fuzzy Decision Maker
2.4. Robust Fuzzy Control Law Design
2.5. Summary of the Proposed Fuzzy-Based Control System
- STEP 1.
- Set up key parameters DCPA, TCPA, and total length D of the fuzzy decision maker to generate the fuzzy collision risk index µCRI and the fuzzy collision avoidance acting timing index µCA.
- STEP 2.
- Specify A in Equation (18) with design eigenvalues αI > 0, for I = 1, …, 6.
- STEP 3.
- Select the weight matrices Q > 0, the desired attenuation level ρ, and the weighting factor O such that ρ2I-O must be a positive definite matrix.
- STEP 4.
- Solve Equation (22) to obtain P.
- STEP 5.
- Construct the fuzzy approximator and for mimicking the overall disturbance .
- STEP 6.
- Construct the robust compensator and the nonlinear fuzzy robust control law in Equation (13) for the collision-free and precise trajectory tracking problem of the controlled USV.
3. Simulation Results
3.1. System and Control Parameters of the Controlled USV
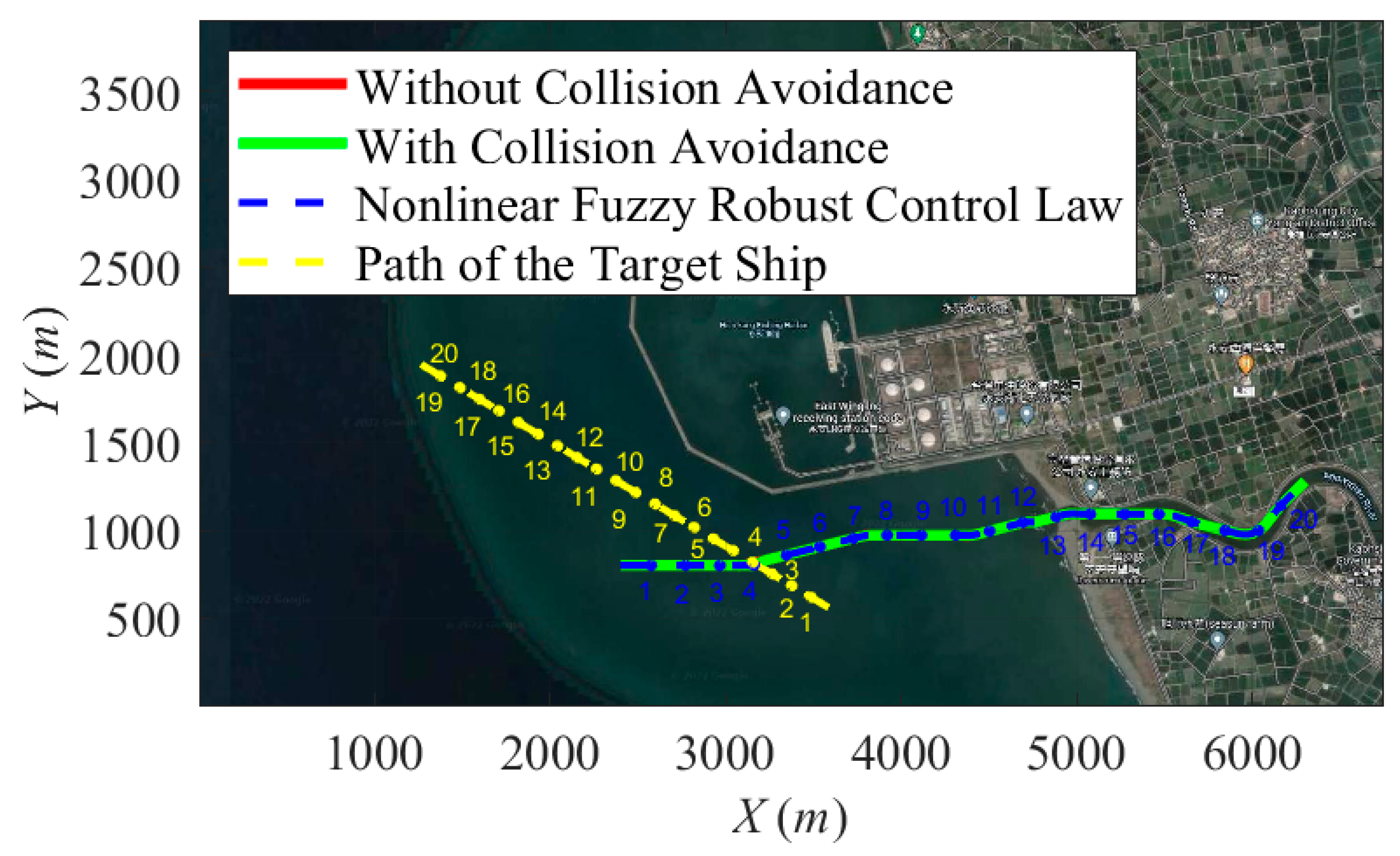
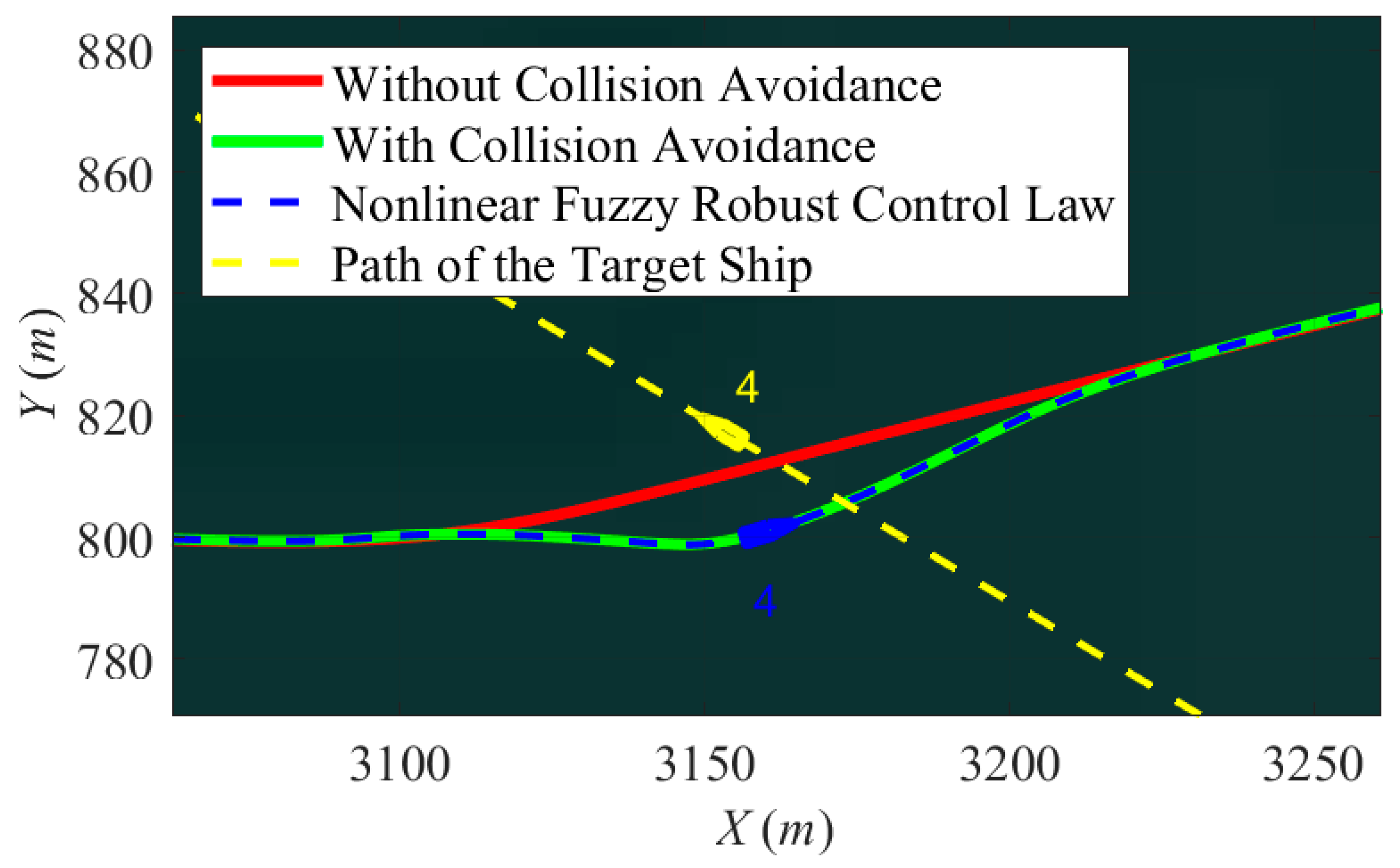
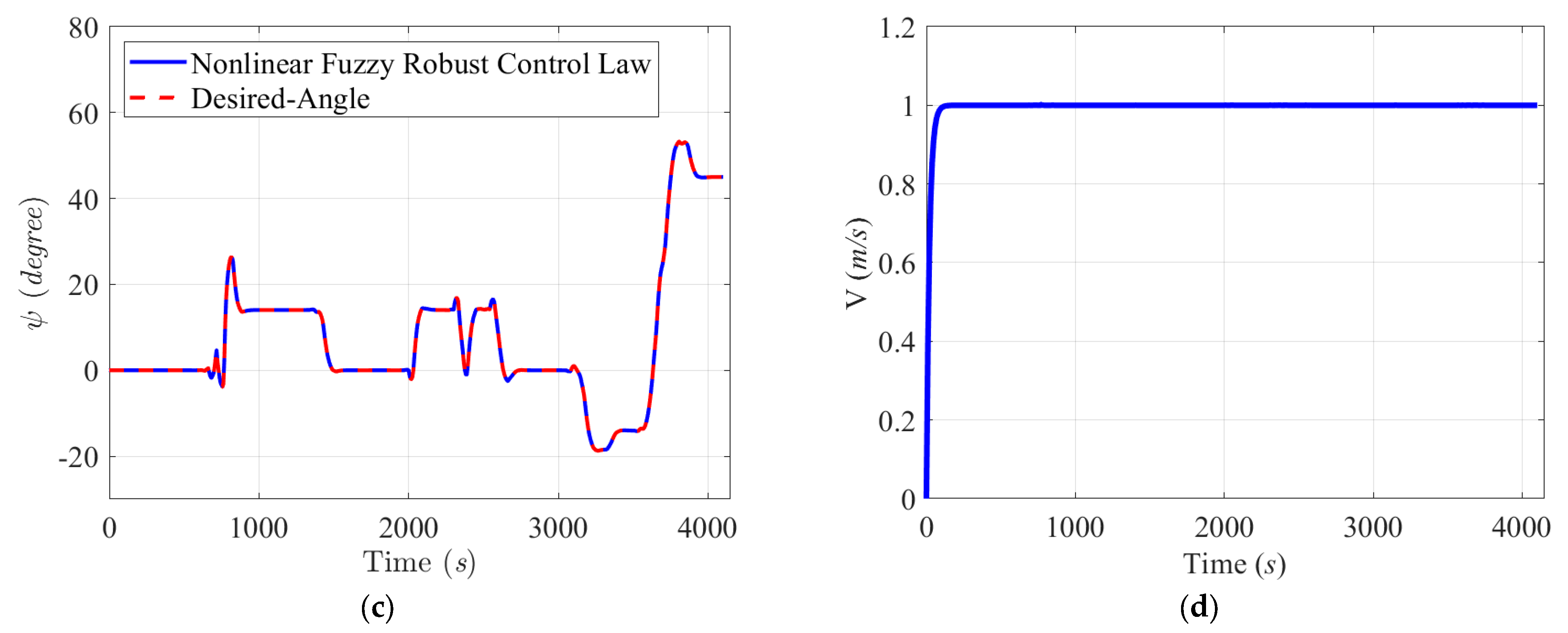
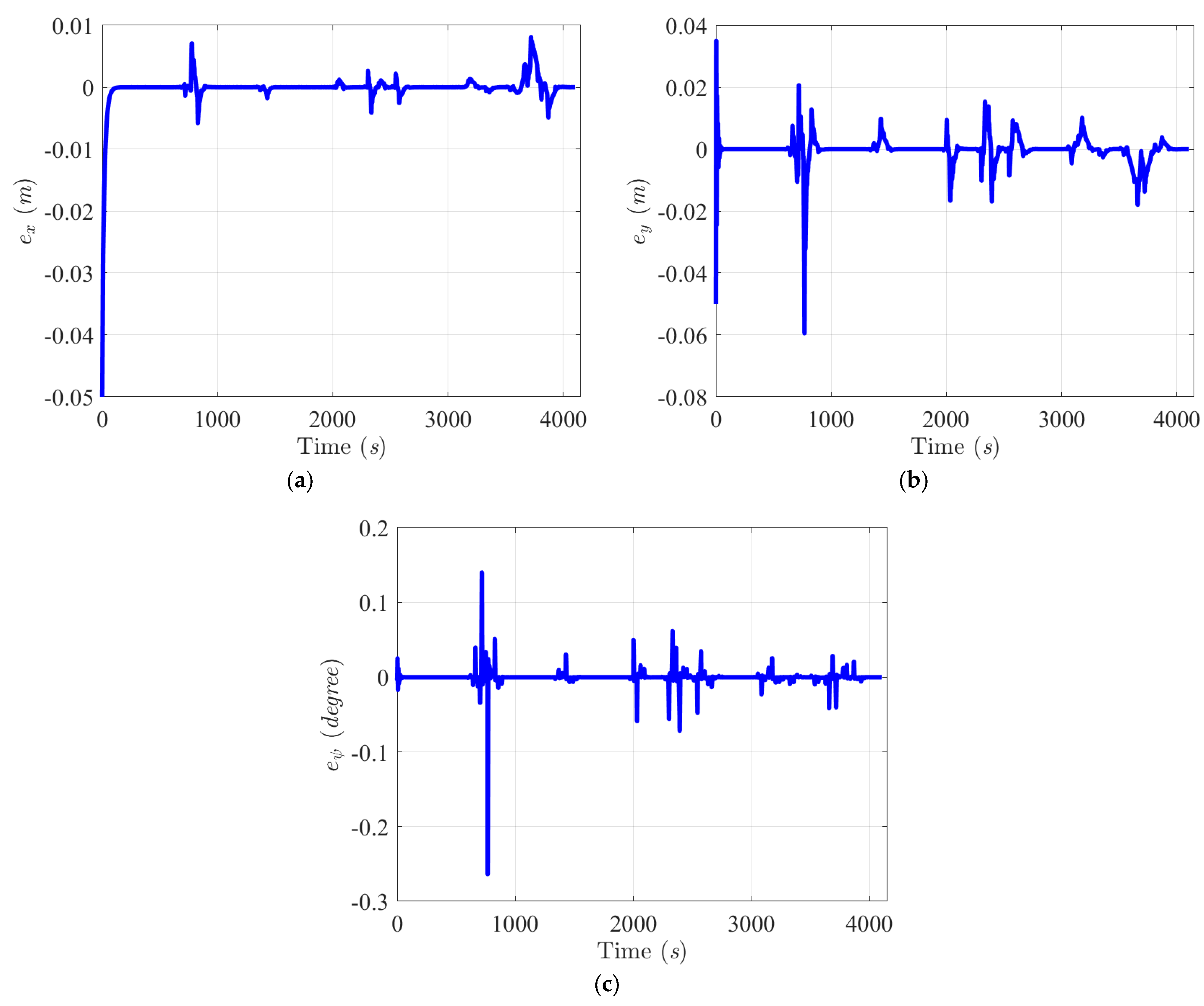
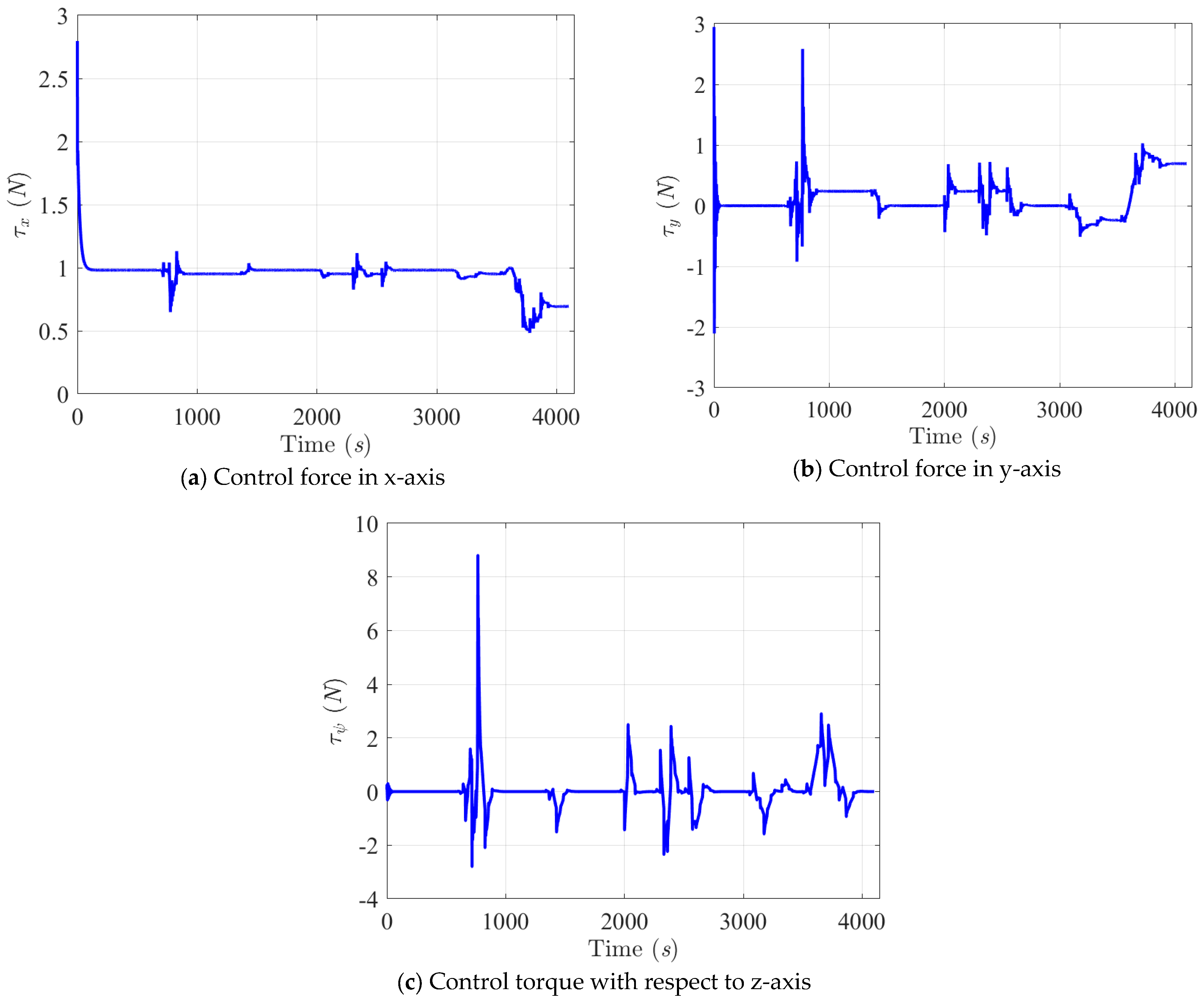
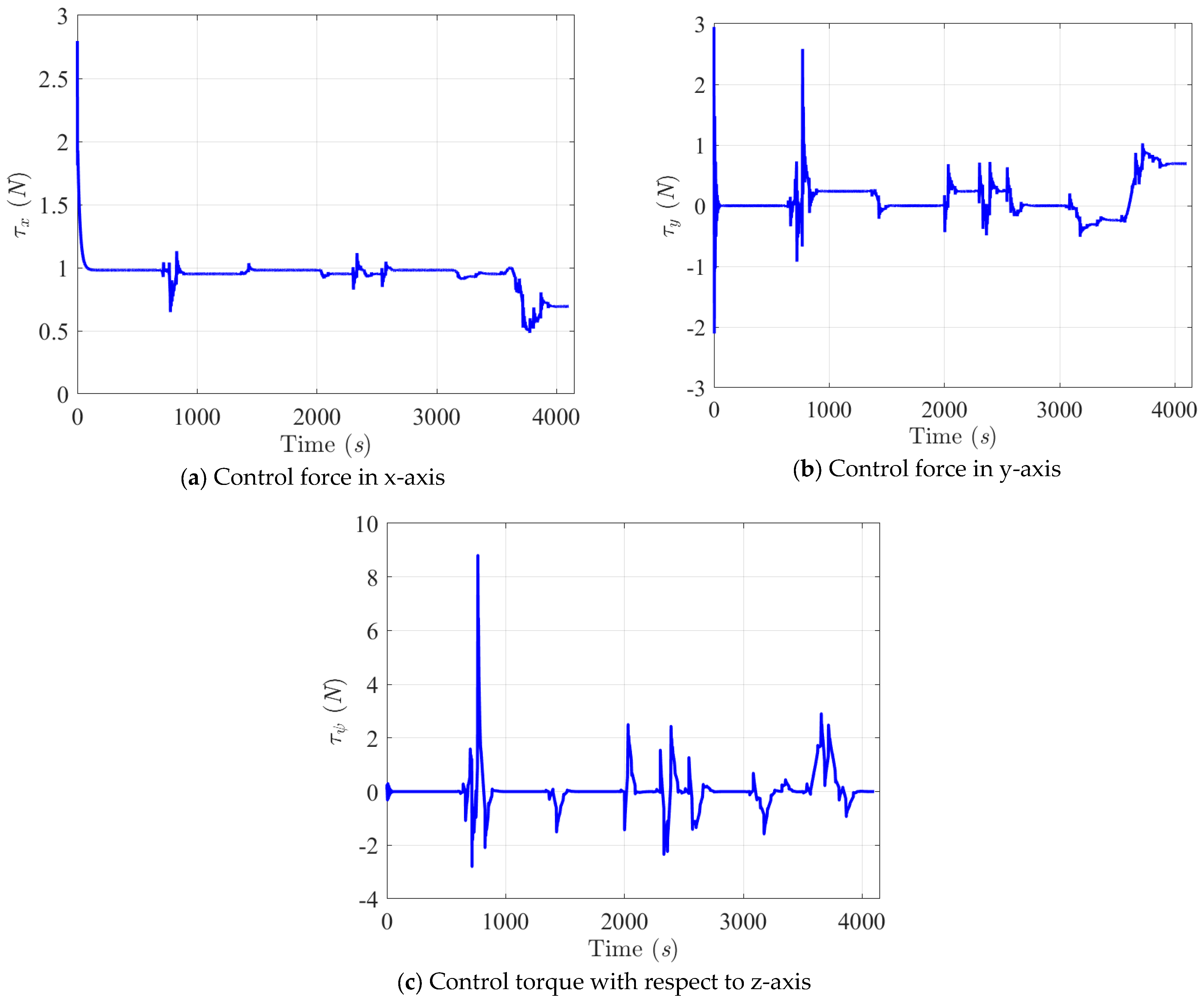
3.2. Collision Avoidance Simulation Results of the Proposed Control System
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Autonomous Shipping Is Making Waves. International Telecommunication Union. Available online: https://www.itu.int/hub/2020/04/autonomous-shipping-is-making-waves/ (accessed on 14 July 2020).
- Autonomous Ships Market Expected to Reach US$ 235.73 Bn by 2028. Acute Market Reports. Available online: https://www.acutemarketreports.com/press/global-autonomous-ships-market (accessed on 15 March 2017).
- Hyundai Heavy Industries (HHI) Group. HD Hyundai’s Avikus Successfully Conducts the World’s First Transoceanic Voyage of a Large Merchant Ship Relying on Autonomous Navigation Technologies; HD Hyundai: Seoul, Republic of Korea, 2022. [Google Scholar]
- Goerlandt, F.; Montewka, J.; Kuzmin, V.; Kujala, P. A Risk-Informed Ship Collision Alert System: Framework and Application. Saf. Sci. 2015, 77, 182–204. [Google Scholar] [CrossRef]
- Beser, F.; Yildirim, T. COLREGS Based Path Planning and Bearing only Obstacle Avoidance for Autonomous Unmanned Surface Vehicles. Procedia Comput. Sci. 2018, 131, 633–640. [Google Scholar] [CrossRef]
- Sedova, N.A.; Sedov, V.A.; Bazhenov, R.I.; Alutina, E.F.; Arkhipova, Z.V.; Mendel, V.V. Intelligent Collision Danger Assessment of Autonomous Unmanned Sea-Going Vessels. In Proceedings of the 2022 International Conference on Quality Management, Transport and Information Security, Information Technologies (IT&QM&IS), Saint Petersburg, Russia, 26–30 September 2022; pp. 197–201. [Google Scholar]
- Chiang, H.T.L.; Tapia, L. COLREG-RRT: An RRT-Based COLREGS-Compliant Motion Planner for Surface Vehicle Navigation. IEEE Robot. Autom. Lett. 2018, 3, 2024–2031. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A Multiobjective Optimization Approach for COLREGs-Compliant Path Planning of Autonomous Surface Vehicles Verified on Networked Bridge Simulators. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1167–1179. [Google Scholar] [CrossRef]
- Zhao, L.; Roh, M.-I. COLREGs-Compliant Multiship Collision Avoidance Based on Deep Reinforcement Learning. Ocean. Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Ellis-Tiew, M.-Z.; Chen, W.-C.; Wang, C.-Z. Fuzzy Risk Evaluation and Collision Avoidance Control of Unmanned Surface Vessels. Appl. Sci. 2021, 11, 6338. [Google Scholar] [CrossRef]
- Llama, M.; Flores, A.; Garcia-Hernandez, R.; Santibañez, V. Heuristic Global Optimization of an Adaptive Fuzzy Controller for the Inverted Pendulum System: Experimental Comparison. Appl. Sci. 2020, 10, 6158. [Google Scholar] [CrossRef]
- Ruiyun, Q.; Gang, T.; Bin, J. Fuzzy System Identification and Adaptive Control; Springer International Publishing: Cham Switzerland, 2019. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Chang, Y.-T.; Chen, B. Fuzzy Solutions to Partial Differential Equations: Adaptive Approach. IEEE Trans. Fuzzy Syst. 2009, 17, 116–127. [Google Scholar] [CrossRef]
- Wang, A.; Liu, L.; Qiu, J.; Feng, G. Event-Triggered Robust Adaptive Fuzzy Control for a Class of Nonlinear Systems. IEEE Trans. Fuzzy Syst. 2019, 27, 1648–1658. [Google Scholar] [CrossRef]
- Wu, J.L. Robust H∞ Control for polytopic Nonlinear Control Systems. IEEE Trans. Autom. Control 2013, 58, 2957–2962. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Lin, L.-K.; Hung, M.-H. Controllable Micromseter Positioning Design of Piezoelectric Actuators Using a Robust Fuzzy Eliminator. Microelectron. Reliab. 2019, 103, 113497. [Google Scholar] [CrossRef]
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length L | 1.72 m |
| Width B | 0.4 m |
| Draft T | 0.3 m |
| Mass m | 41 kg |
| Iz | 6.522 kg∙m |
| xg | 0 m |
| −1.291 kg | |
| −40.326 kg | |
| −39.04525 N∙s2/m2 | |
| 200.79808 N∙m∙s | |
| −0.98 N∙s2/m2 | |
| −38.808 N∙s2/m2 | |
| −16.43778 N∙s | |
| −14.340 N∙s2/m2 | |
| −236.5 N∙m∙s |
| Starting Point | (2400 m, 800 m) |
| Goal Point | (6300 m, 1280 m) |
| Desired Velocity | 1 m/s |
| Initial Condition of the Controlled USV |
| Starting Point | (3586 m, 559 m) |
| Goal Point | (0, 2700 m) |
| Desired Velocity | 0.663 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.-Y.; Ellis-Tiew, M.-Z. Autonomous Trajectory Tracking and Collision Avoidance Design for Unmanned Surface Vessels: A Nonlinear Fuzzy Approach. Mathematics 2023, 11, 3632. https://doi.org/10.3390/math11173632
Chen Y-Y, Ellis-Tiew M-Z. Autonomous Trajectory Tracking and Collision Avoidance Design for Unmanned Surface Vessels: A Nonlinear Fuzzy Approach. Mathematics. 2023; 11(17):3632. https://doi.org/10.3390/math11173632
Chicago/Turabian StyleChen, Yung-Yue, and Ming-Zhen Ellis-Tiew. 2023. "Autonomous Trajectory Tracking and Collision Avoidance Design for Unmanned Surface Vessels: A Nonlinear Fuzzy Approach" Mathematics 11, no. 17: 3632. https://doi.org/10.3390/math11173632
APA StyleChen, Y.-Y., & Ellis-Tiew, M.-Z. (2023). Autonomous Trajectory Tracking and Collision Avoidance Design for Unmanned Surface Vessels: A Nonlinear Fuzzy Approach. Mathematics, 11(17), 3632. https://doi.org/10.3390/math11173632