
Output Stabilization of Linear Systems in Given Set


Abstract
:1. Introduction
- We propose a general procedure for stabilizing unstable linear systems, including MIMO cases, using state feedback and observer-based feedback;
- The parameters for the control law are computed utilizing LMIs;
- We provide recommendations for selecting control law parameters to reduce the influence of disturbances.
2. Notation and a Key Lemma
- -
- is Euclidean space of dimension n with norm ;
- -
- denotes the set of all real matrices with norm ;
- -
- denotes the identity, zero, and diagonal matrix (of the corresponding dimension);
- -
- denotes the all-one vector with m values 1;
- -
- For quadratic matrices , means that A is a positive-definite matrix (negative-definite matrix). means that A is a non-negative definite matrix (non-positive definite matrix);
- -
- The symbol denotes a symmetric block in a symmetric matrix.
3. Problem Statement
4. Solution Method
- (a)
- and there exists an inverse mapping
- (b)
- is a differentiable function with respect to and t, and ;
- (c)
- and ;
- (d)
- is a bounded function for and , , where is determined by (3).
5. State Feedback Control
6. Observer-Based Feedback Control
7. Examples
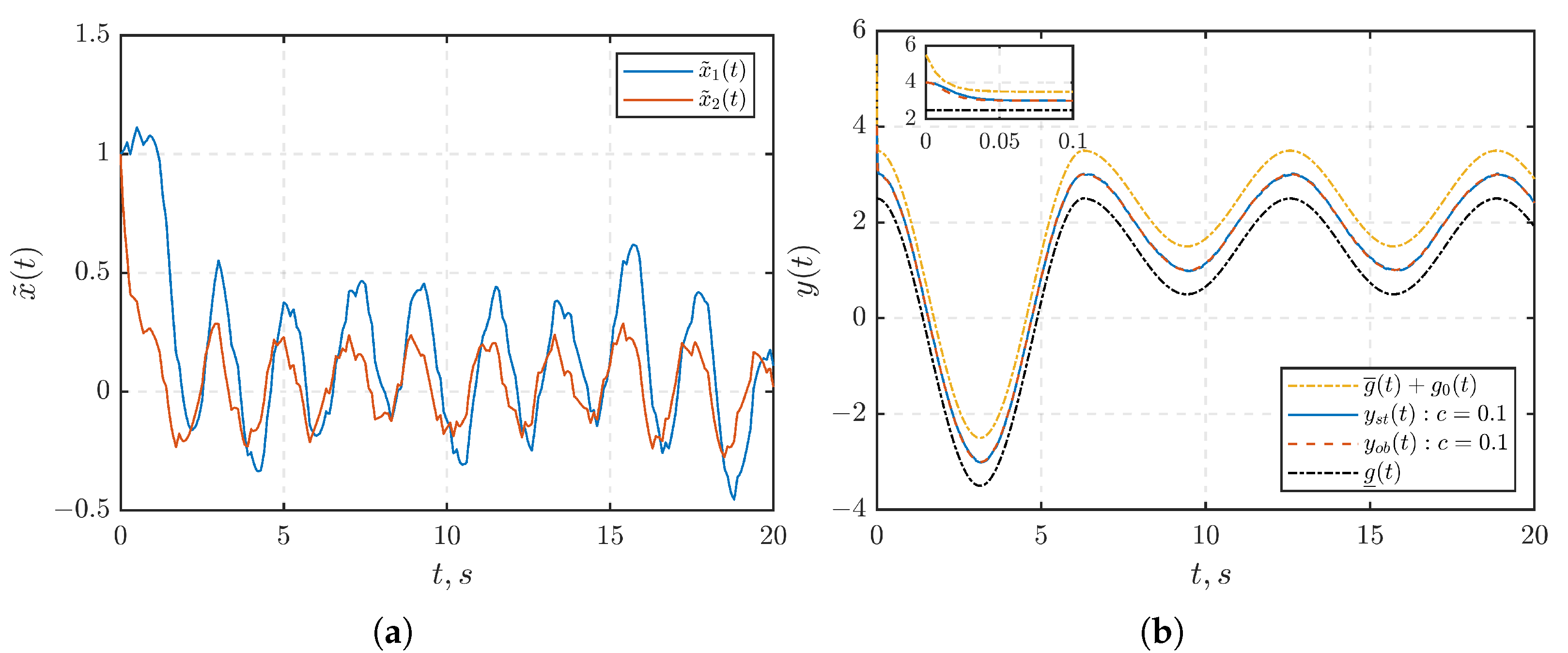
7.1. Example 1: SISO Case
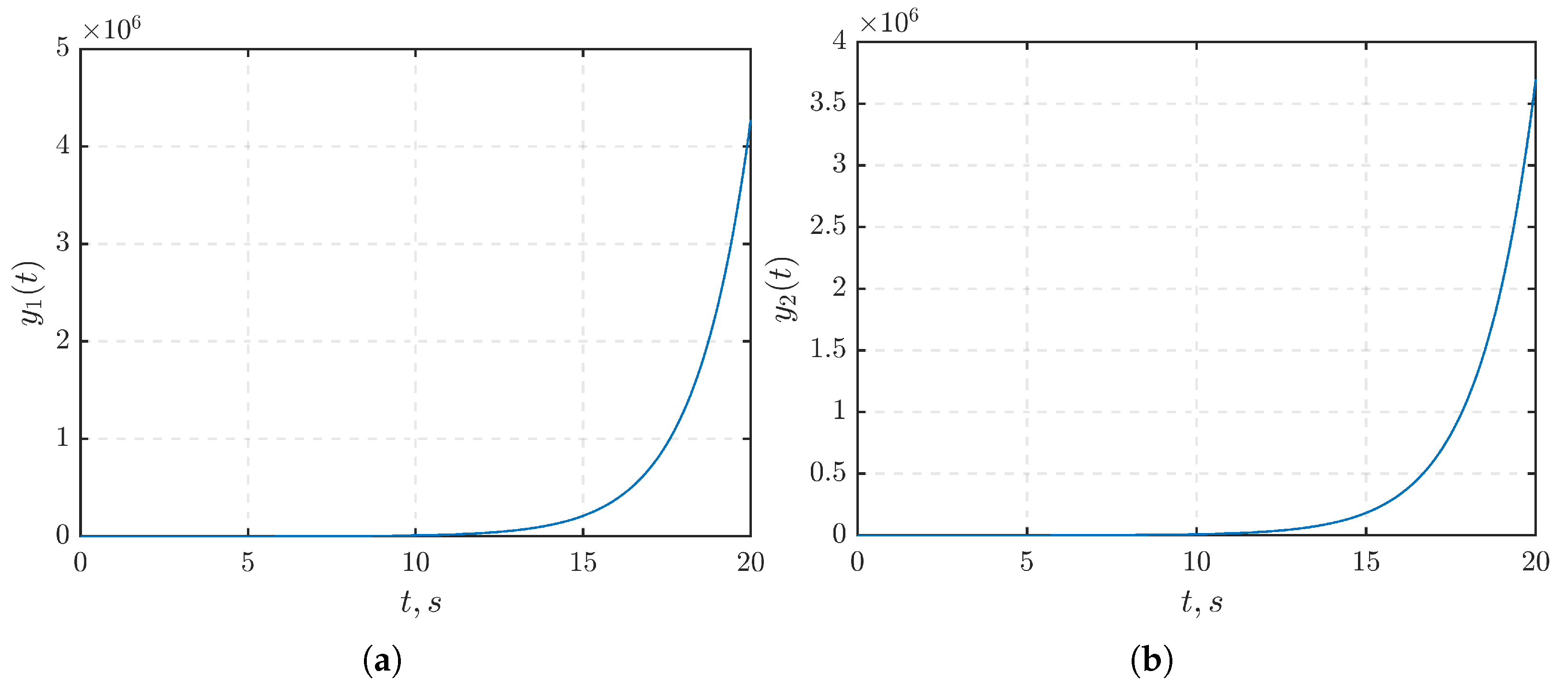
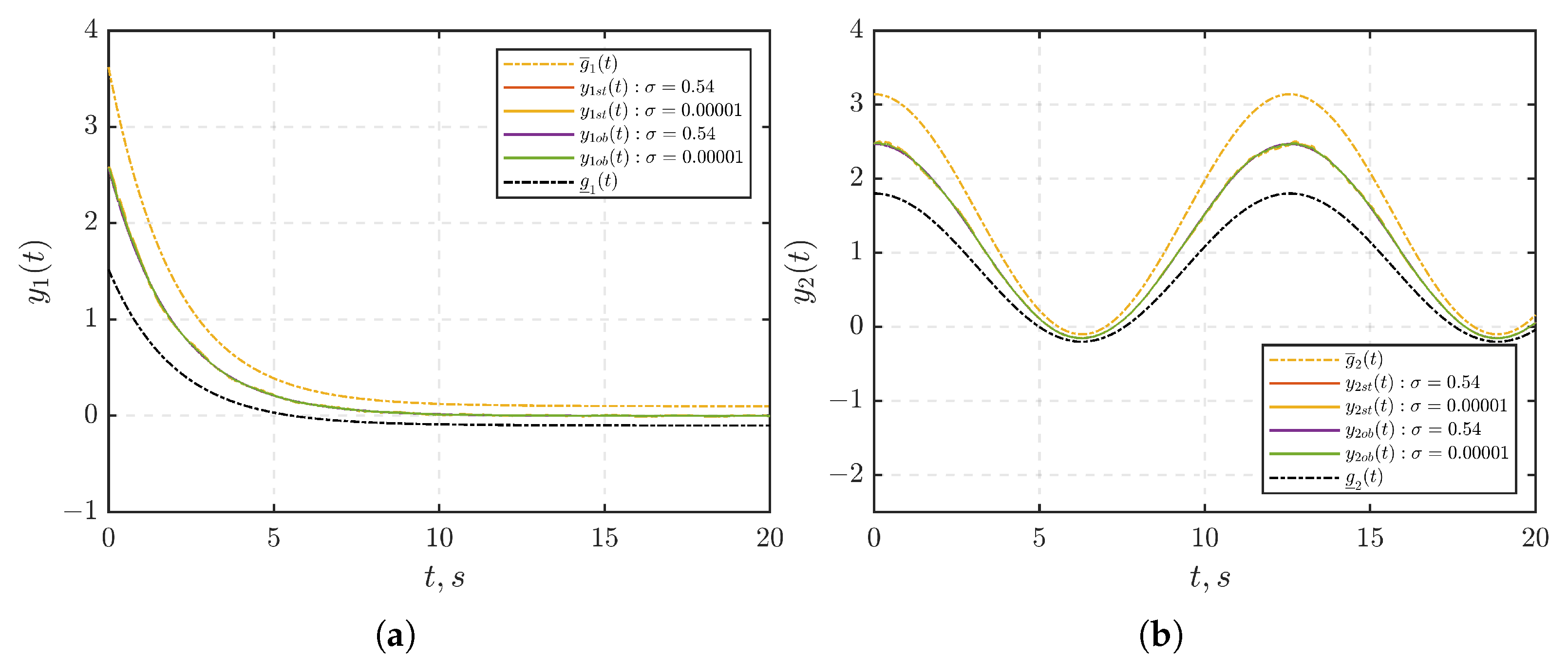
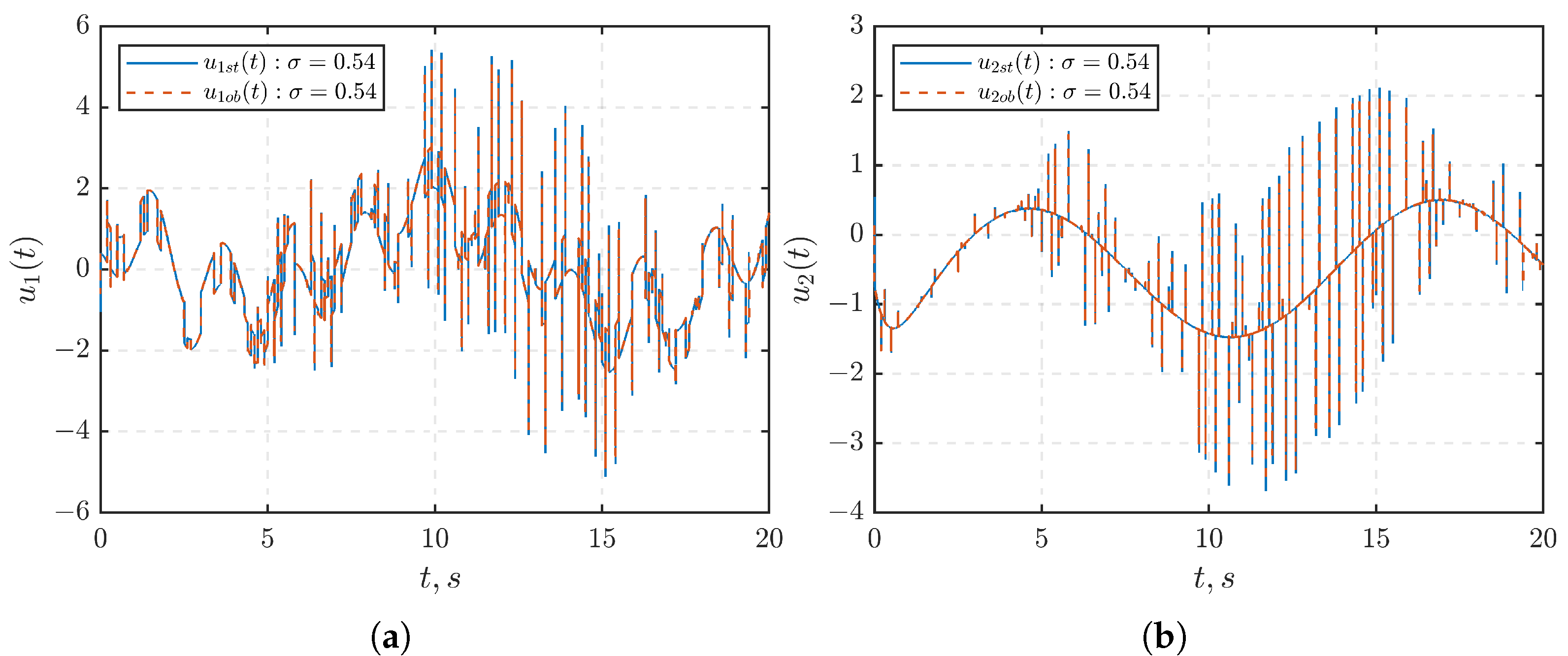
7.2. Example 2: MIMO Case
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boldea, I. Control of Electric Generators: A Review. IECON Proc. Industrial Electron. Conf. 2003, 1, 972–980. [Google Scholar] [CrossRef]
- Furtat, I.; Nekhoroshikh, A.; Gushchin, P. Synchronization of multi-machine power systems under disturbances and measurement errors. Int. J. Adapt. Control. Signal Process. 2022, 36, 1272–1284. [Google Scholar] [CrossRef]
- Pavlov, G.; Merkurev, G. Energy Systems Automation; Papirus Publisher: St. Petersburg, Russia, 2001. (In Russian) [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill Education: New York, NY, USA, 1994; p. 1176. [Google Scholar]
- Landera, Y.G.; Zevallos, O.C.; Neves, F.A.S.; Neto, R.C.; Prada, R.B. Control of PV Systems for Multimachine Power System Stability Improvement. IEEE Access 2022, 10, 45061–45072. [Google Scholar] [CrossRef]
- Feydi, A.; Elloumi, S.; Braiek, N.B. Robustness of Decentralized Optimal Control Strategy Applied On Two Interconnected Generators System With Uncertainties. In Proceedings of the 2023 IEEE International Conference on Advanced Systems and Emergent Technologies, Hammamet, Tunisia, 29 April–1 May 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Tan, H.; Cong, L. Modeling and Control Design for Distillation Columns Based on the Equilibrium Theory. Processes 2023, 11, 607. [Google Scholar] [CrossRef]
- Verevkin, A.; Kiriushin, O. Control of the formation pressure system using finite-state-machine models. Oil Gas Territ. 2008, 10, 14–19. (In Russian) [Google Scholar]
- Bouyahiaoui, C.; Grigoriev, L.I.; Laaouad, F.; Khelassi, A. Optimal fuzzy control to reduce energy consumption in distillation columns. Autom. Remote Control 2005, 66, 200–208. [Google Scholar] [CrossRef]
- Sunori, S.K.; Joshi, K.A.; Mittal, A.; Nainwal, D.; Khan, F.; Juneja, P. Improvement in Controller Performance for Distillation Column Using IMC Technique. In Proceedings of the 2023 International Conference for Advancement in Technology (ICONAT), Goa, India, 24–26 January 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2010; Volume 5. [Google Scholar]
- Lewis, F.L.; Vrabie, D.; Syrmos, V.L. Optimal Control; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Filabadi, M.M.; Hashemi, E. Distributed Robust Control Framework for Adaptive Cruise Control Systems. In Proceedings of the 2023 American Control Conference (ACC), San Diego, CA, USA, 31 May–2 June 2023; pp. 3215–3220. [Google Scholar] [CrossRef]
- Wang, T.; Sun, Z.; Ke, Y.; Li, C.; Hu, J. Two-Step Adaptive Control for Planar Type Docking of Autonomous Underwater Vehicle. Mathematics 2023, 11, 3467. [Google Scholar] [CrossRef]
- Hassan, F.; Zolotas, A.; Halikias, G. New Insights on Robust Control of Tilting Trains with Combined Uncertainty and Performance Constraints. Mathematics 2023, 11, 3057. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; PTR Prentice-Hall: Upper Saddle River, NJ, USA, 1996; Volume 1. [Google Scholar]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Narendra, K.S.; Annaswamy, A.M. Stable Adaptive Systems; Courier Corporation: Chelmsford, MA, USA, 2012. [Google Scholar]
- Tao, G. Adaptive Control Design and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2003; Volume 37. [Google Scholar]
- Xu, J.; Lin, N.; Chi, R. Improved High-Order Model Free Adaptive Control. In Proceedings of the 2021 IEEE 10th Data Driven Control and Learning Systems Conference (DDCLS), Suzhou, China, 14–16 May 2021; pp. 704–708. [Google Scholar] [CrossRef]
- Khlebnikov, M.V.; Polyak, B.T.; Kuntsevich, V.M. Optimization of linear systems subject to bounded exogenous disturbances: The invariant ellipsoid technique. Autom. Remote Control 2011, 72, 2227–2275. [Google Scholar] [CrossRef]
- Miller, D.E.; Davison, E.J. An Adaptive Controller Which Provides an Arbitrarily Good Transient and Steady-State Response. IEEE Trans. Autom. Control 1991, 36, 68–81. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems With Prescribed Performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Furtat, I.; Gushchin, P. Control of Dynamical Systems with Given Restrictions on Output Signal with Application to Linear Systems. IFAC Pap. 2020, 53, 6384–6389. [Google Scholar] [CrossRef]
- Furtat, I.B.; Gushchin, P.A. Control of Dynamical Plants with a Guarantee for the Controlled Signal to Stay in a Given Set. Autom. Remote Control 2021, 82, 654–669. [Google Scholar] [CrossRef]
- Polyak, B.T.; Khlebnikov, M.V.; Shcherbakov, P.S. Linear Matrix Inequalities in Control Systems with Uncertainty. Autom. Remote Control 2021, 82, 1–40. [Google Scholar] [CrossRef]
- Poznyak, A.; Polyakov, A.; Azhmyakov, V. Attractive Ellipsoids in Robust Control; Springer International Publishing: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Fradkov, A.L.; Miroshnik, I.V.; Nikiforov, V.O. Nonlinear and Adaptive Control of Complex Systems; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar] [CrossRef]
- Isidori, A. Nonlinear Control Systems II; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Khalil, H.K. Nonlinear Control; Pearson: New York, NY, USA, 2015; Volume 406. [Google Scholar]
- Sturm, J.F. Using SeDuMi 1.02, a Matlab toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Toh, K.C.; Todd, M.J.; Toh, K.C.; Todd, M.J.; Tütüncü, R.H.; TOHal, K.C.; Tutuncu, R.H. SDPT3-a MATLAB software package for semidefinite programming, version 1.3. Optirniration Methods Softw. 1999, 11, 545–581. [Google Scholar] [CrossRef]
- Borchers, B. CSDP, A C library for semidefinite programming. Optim. Methods Softw. 1999, 11, 613–623. [Google Scholar] [CrossRef]
- Luenberger, D. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Löfberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the IEEE International Symposium on Computer-Aided Control System Design, Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| c | State Feedback Method | Observer-Based Method |
|---|---|---|
| 100 | (6.31, 2.68, 4.34) | (8.35, 6.69, 2.17) |
| 0.1 | (33.18, 42.66, 0.05) | (65.73, 85.65, 0.02) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, B.H.; Furtat, I.B. Output Stabilization of Linear Systems in Given Set. Mathematics 2023, 11, 3542. https://doi.org/10.3390/math11163542
Nguyen BH, Furtat IB. Output Stabilization of Linear Systems in Given Set. Mathematics. 2023; 11(16):3542. https://doi.org/10.3390/math11163542
Chicago/Turabian StyleNguyen, Ba Huy, and Igor B. Furtat. 2023. "Output Stabilization of Linear Systems in Given Set" Mathematics 11, no. 16: 3542. https://doi.org/10.3390/math11163542
APA StyleNguyen, B. H., & Furtat, I. B. (2023). Output Stabilization of Linear Systems in Given Set. Mathematics, 11(16), 3542. https://doi.org/10.3390/math11163542