

Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses

 ,
,  , , and
, , and
Abstract
1. Introduction
- (1)
- identify “weak links” of trolleybus electrical equipment and get an actual picture of the reliability of elements;
- (2)
- carry out a reliability study of the traction electric motor on the basis of failure analysis.
- optimal organization of diagnostics and control of technical condition of EE;
- assessment and prediction of EE reliability during operation;
- Optimization of timing, definition of scope and selection of a rational strategy and planning of maintenance and repair of EE, taking into account its technical condition.
- Conducting and systematizing an analysis of existing methods of diagnosing and evaluating the reliability of EE.
- Optimal organization of diagnostic and technical condition control processes of trolleybus EE. Creation of an algorithm for trolleybus EE diagnostics.
- Assessment and prediction of reliability of the trolleybus electrical complex by operational indicators and optimization of EE maintenance timing by mileage and operating time.
- Development of integrated methods for reliability assessment and prediction of serviceability and integral probabilistic diagnostic systems for predicting the technical condition of the trolleybus electrical complex using stochastic and deterministic models.
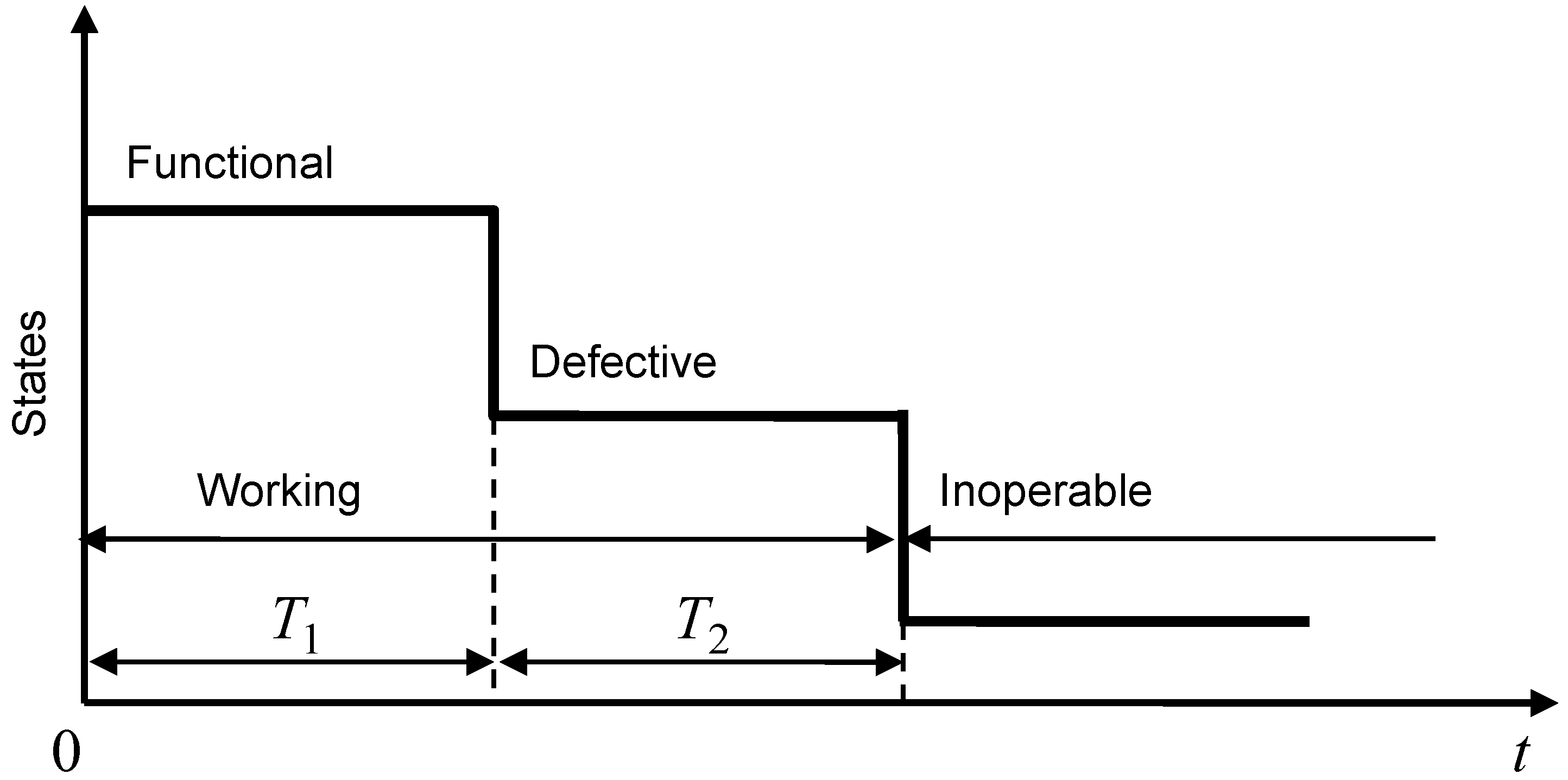
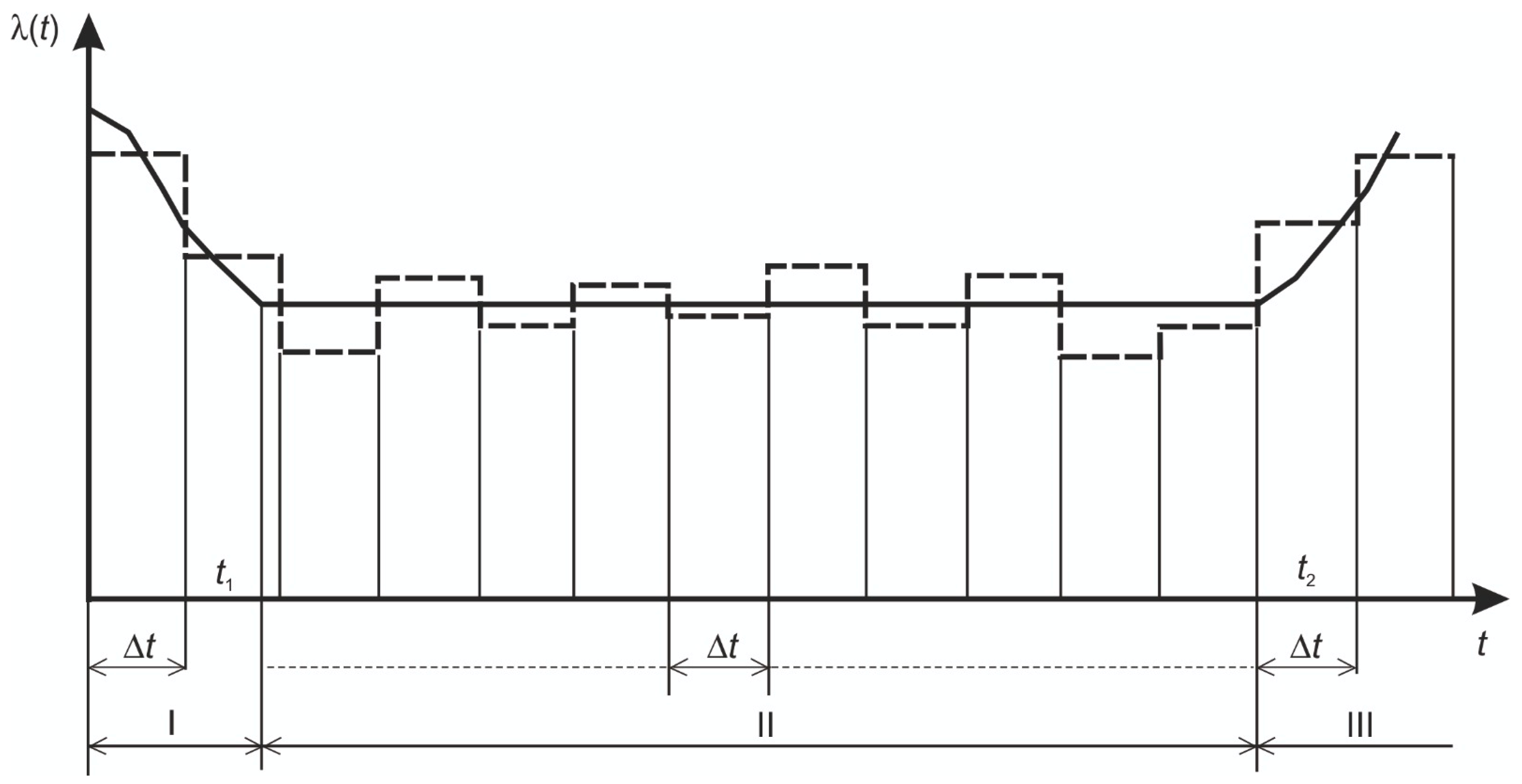
2. Analysis of the Effect of Service Life of Electrical Equipment on the Probability of Failure-Free Operation
- is the probability of device failure during the time ;
- is reliability or probability of failure;
- is the distribution density of uptime;
- is the number of failures of similar objects on the interval ;
- is number of operable objects in the middle of the interval.
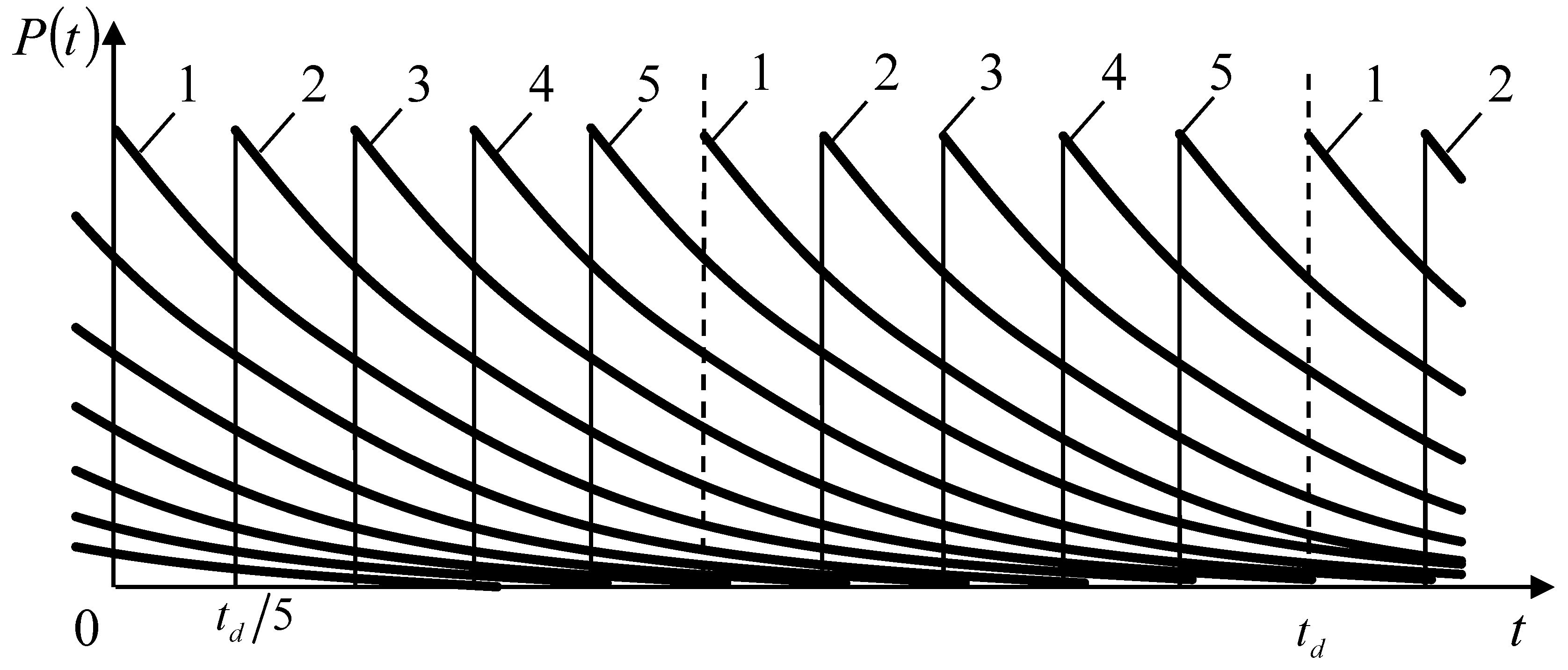
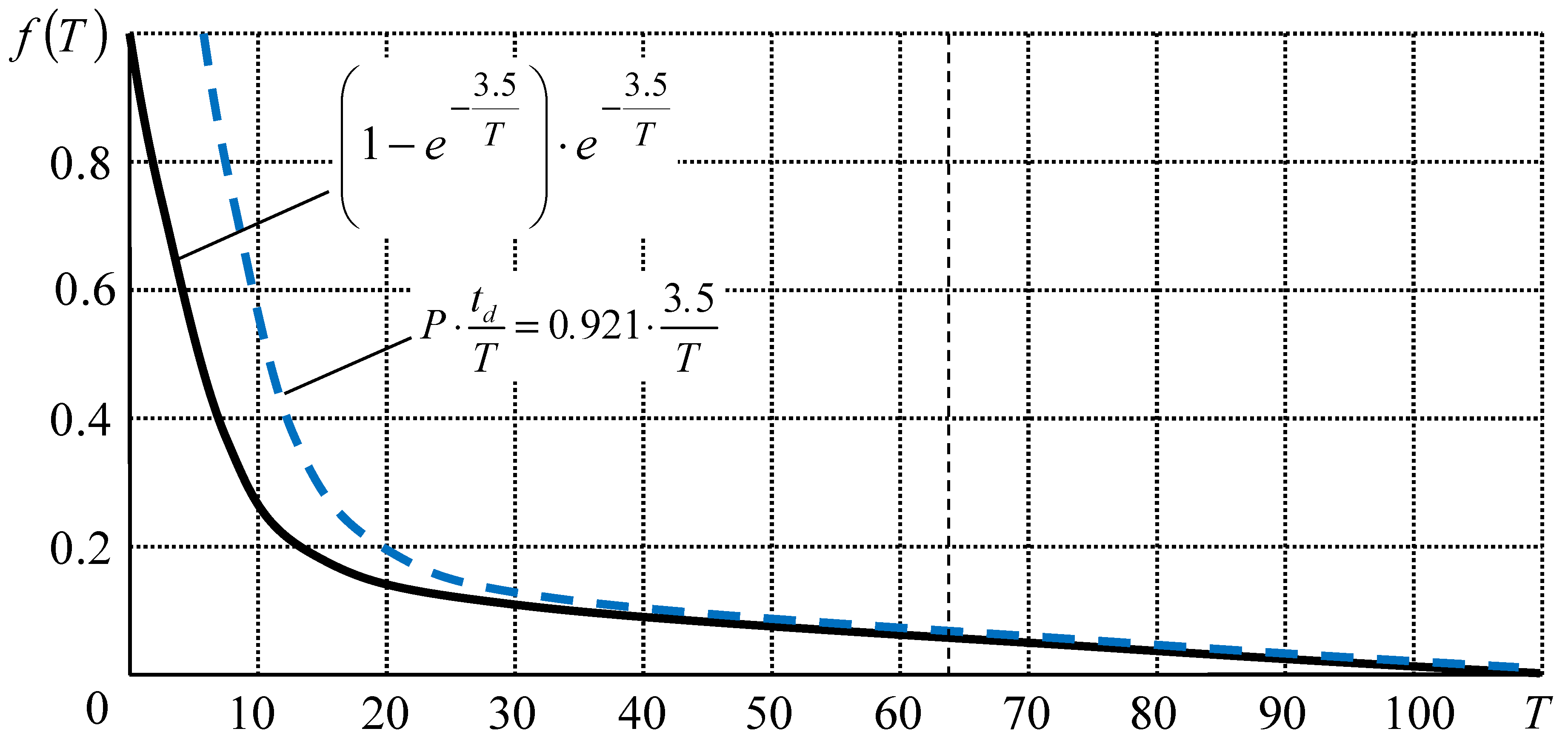
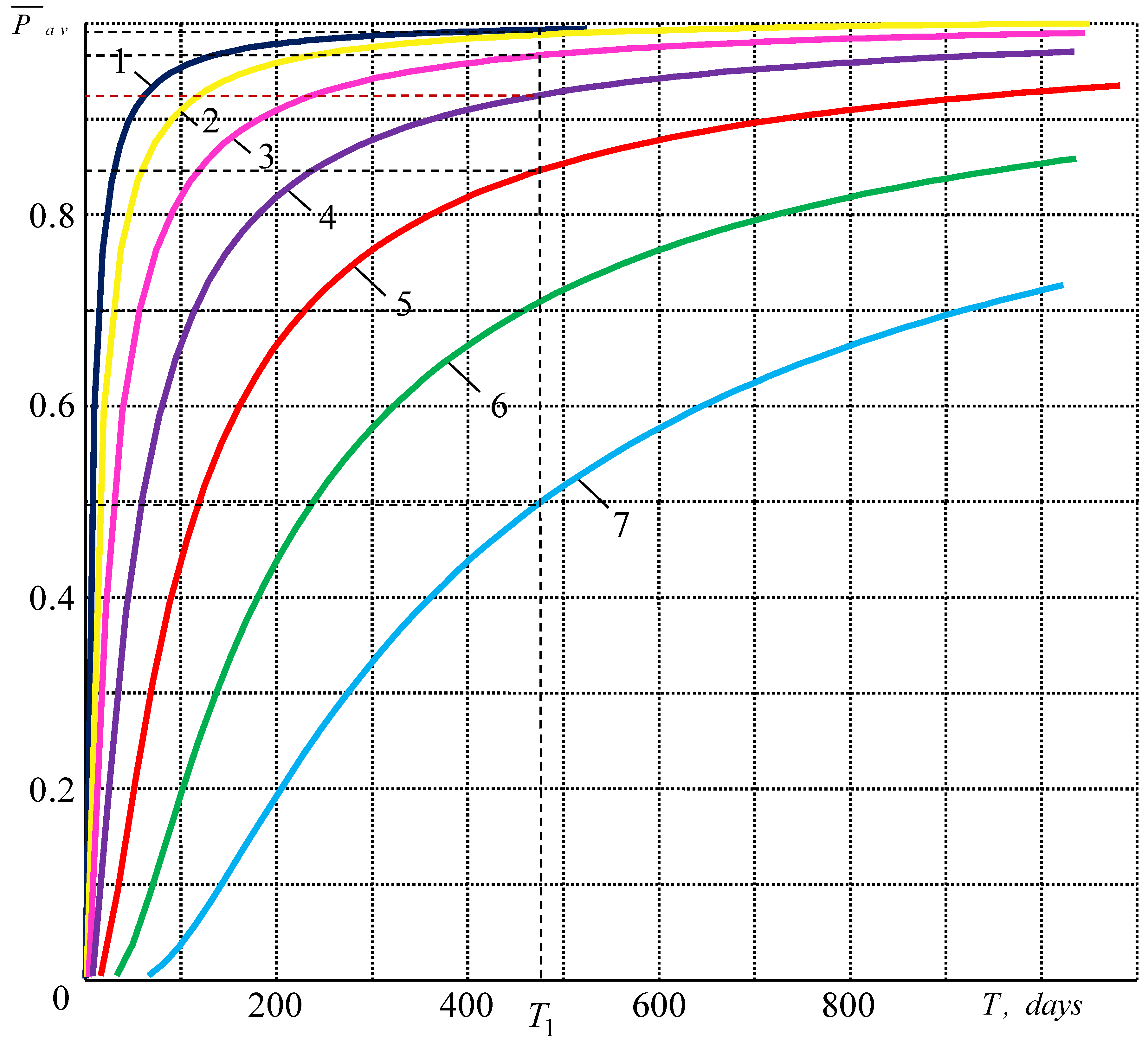
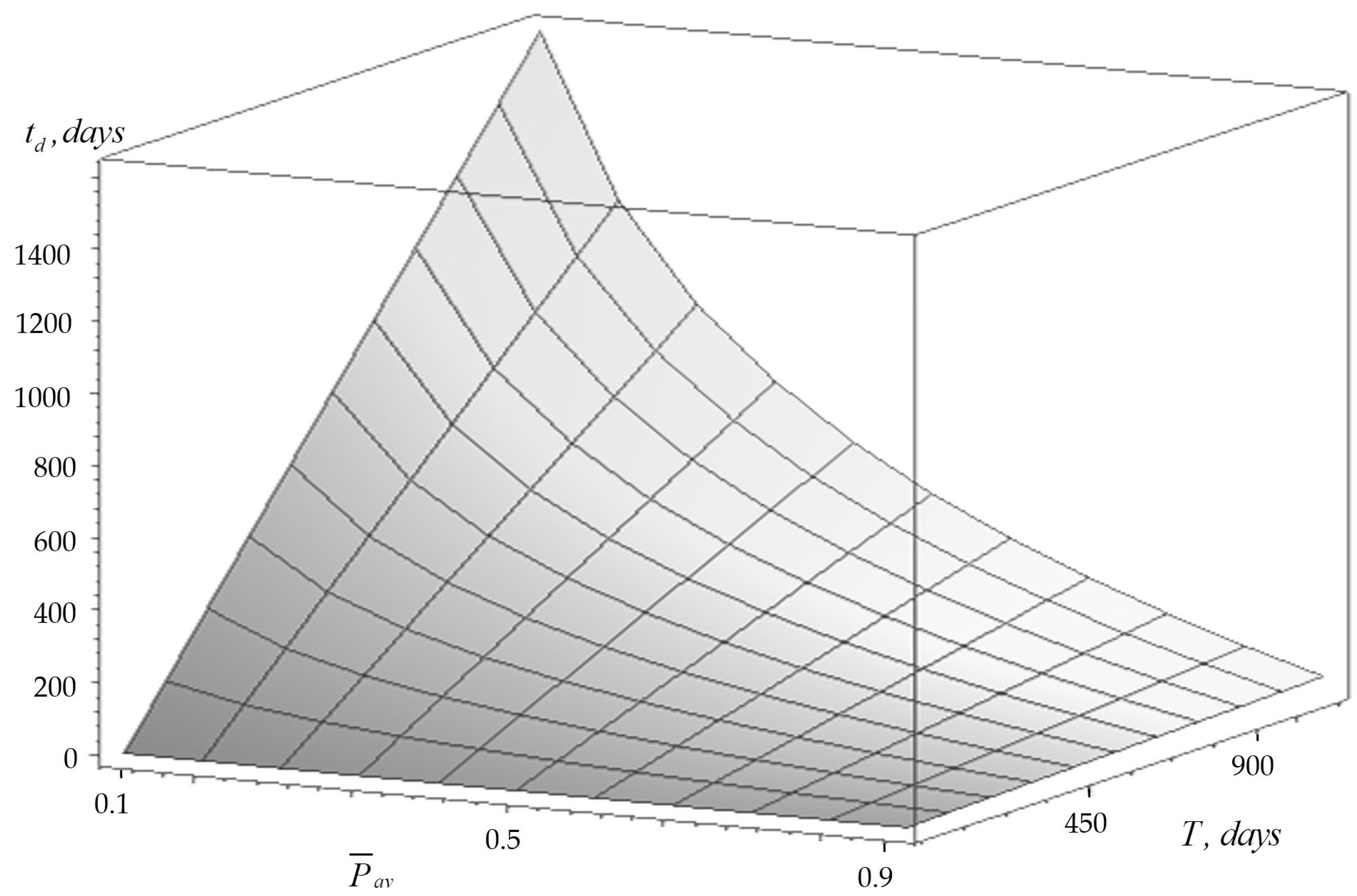
3. Determination of the Timeframe for Diagnosing the Trolleybus Electrical Complex Based on the Mean Time between Failures (MTBF)
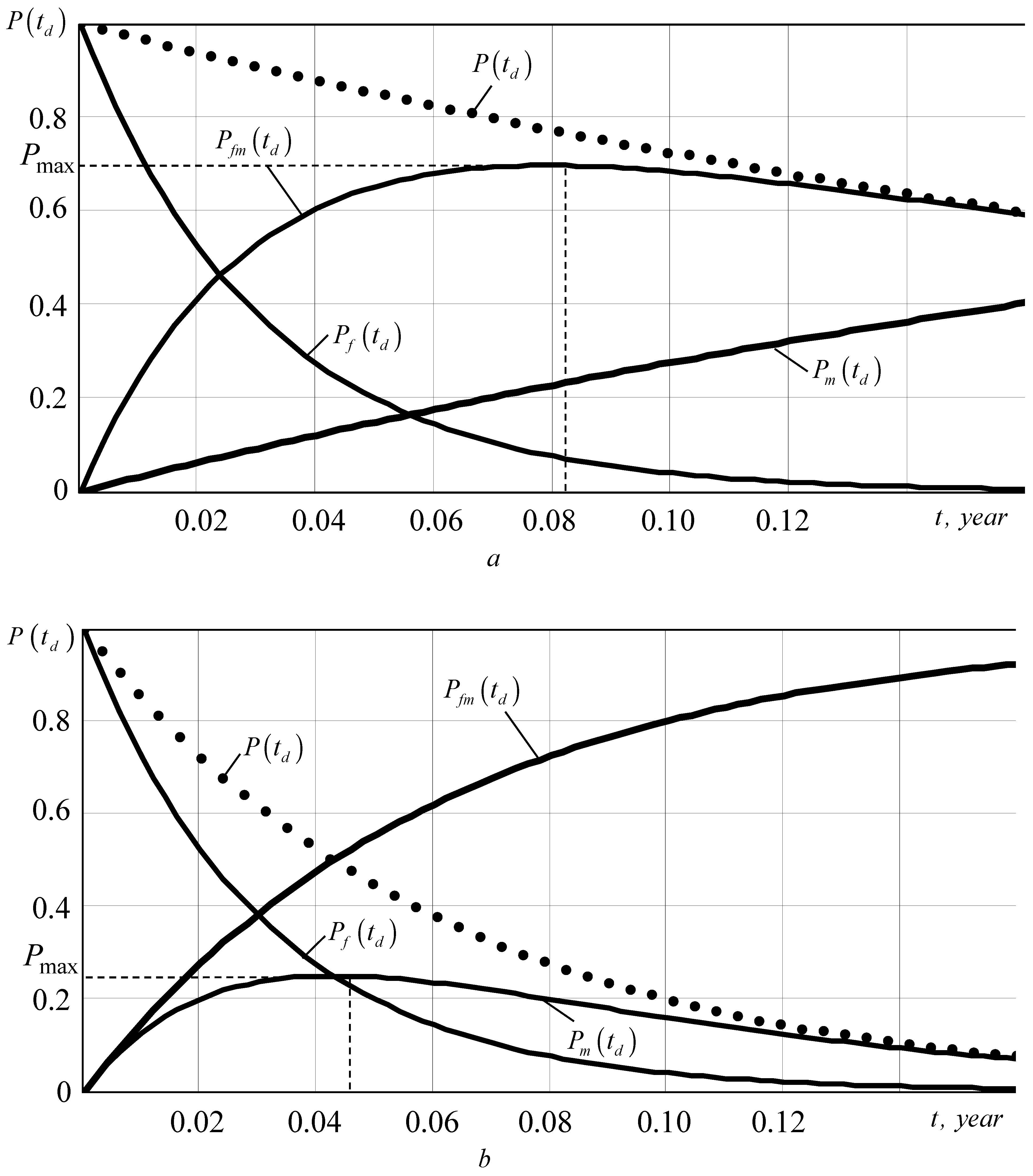
4. Influence of the Balance of Failures and Faults of Electrical Equipment on the Terms of Its Diagnosis
5. Conclusions
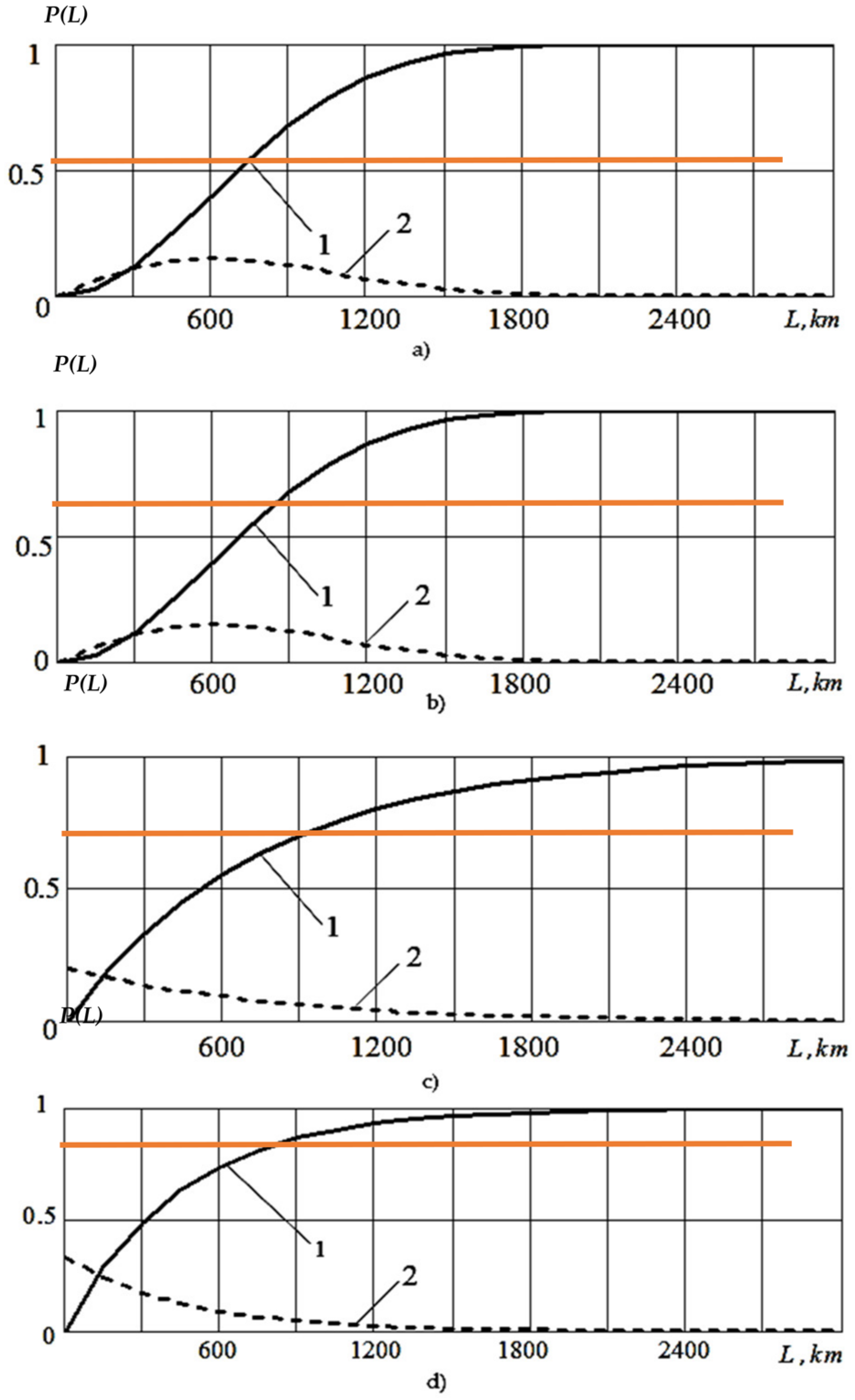
- As a result of processing statistical information on failures, it was found that for trolleybus electrical equipment after a number of repair actions, the maximum failure density occurs at lower mileage, and the probability of failure-free operation can vary depending on the degree of wear of the equipment, i.e., on the number of previous failures. In addition, Gauss’s law is valid for brand new electrical equipment. In all other cases, Rayleigh’s uniform and exponential law is more valid. This analysis allows us to say that the recovery of technical reliability of trolleybus and electric bus subsystems is not complete and it is necessary to take into account the recovery factor of the whole system, which will be the subject of future research.
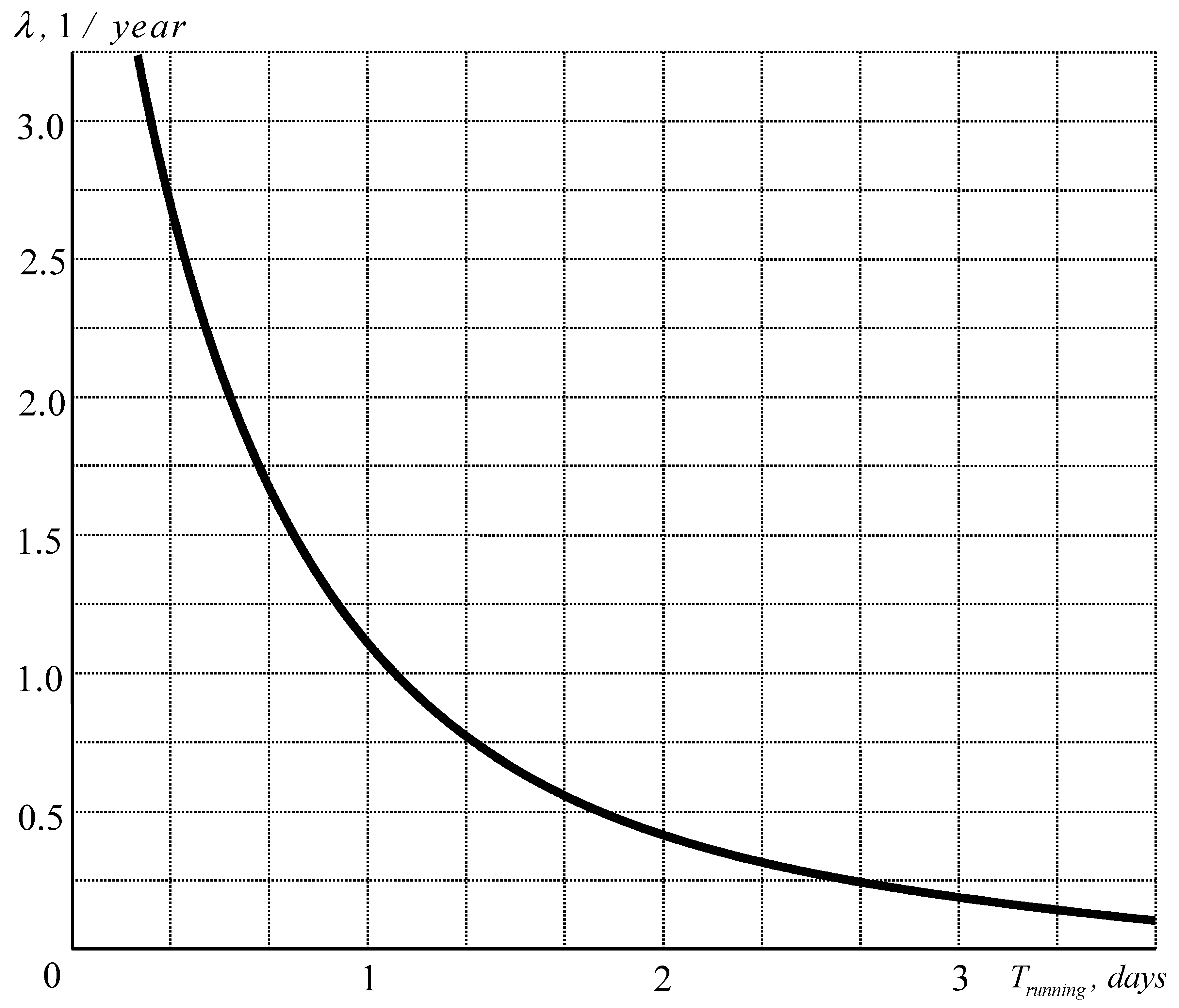
- The dependence of switching equipment run-in on time has been clarified, which served as a prerequisite for specifying the inter-repair period for each type of trolleybus electrical equipment. The method of adjustment of the inter-repair time for the electrical equipment of trolleybuses is proposed.
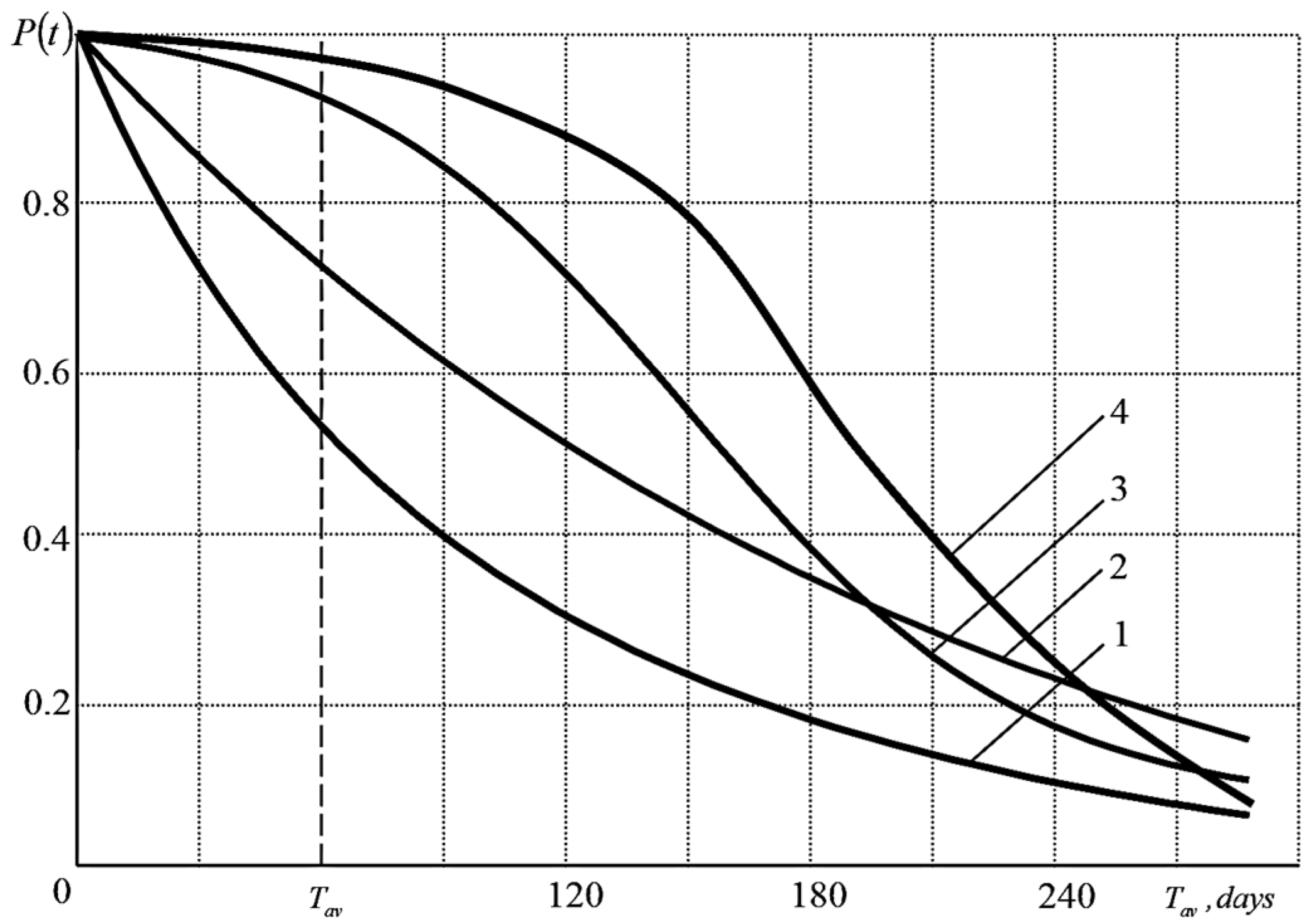
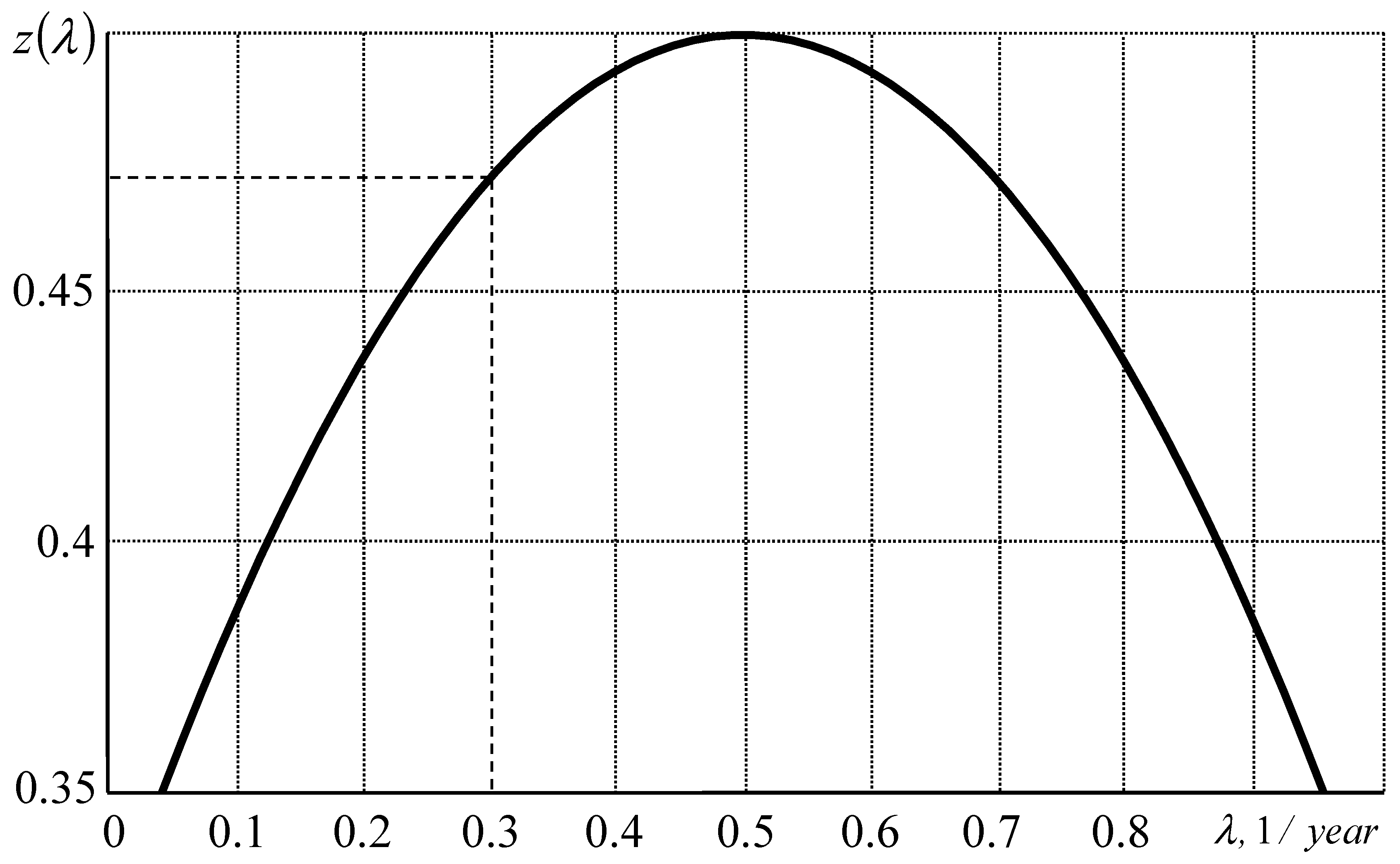
- It is theoretically substantiated and experimentally confirmed that the reliability of electrical equipment of trolleybuses in operation changes according to the exponential law. It has been established that the real average diagnostics terms regulated by instructions are not optimal in most cases and differ several times from those defined in the work. Thus, it is necessary to switch from the planned preventive repair system to the system of repairs according to need (according to the current technical condition).
- On the basis of reliability theory, probability theory and mathematical statistics, numerical methods of nonlinear and transcendental equations solution, the terms of diagnostics td depending on failure intensity λ(t) and given probability of equipment no-failure operation P(t) are determined. The inverse problem of determining the current reliability of electrical engineering systems depending on the diagnostic time td and the failure rate λ (t) is also solved.
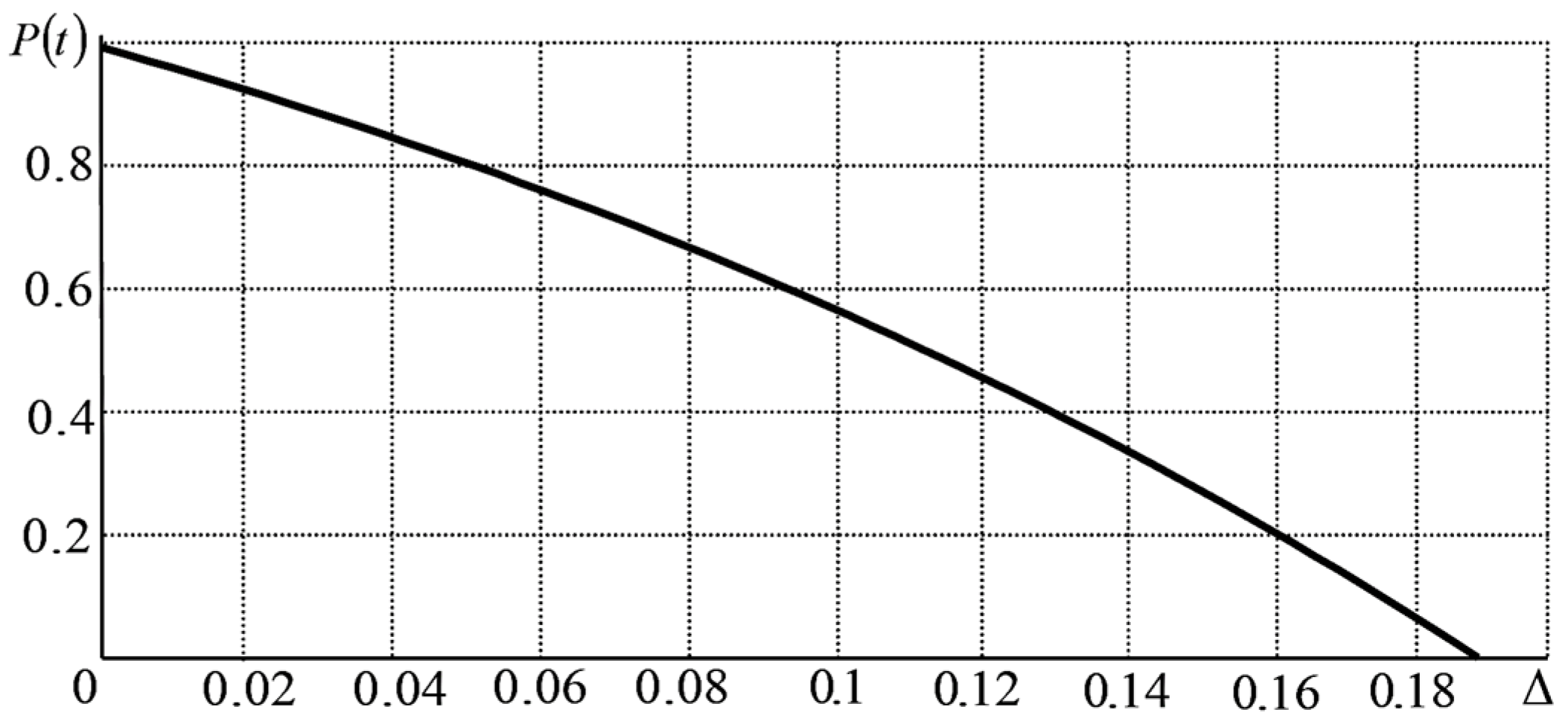
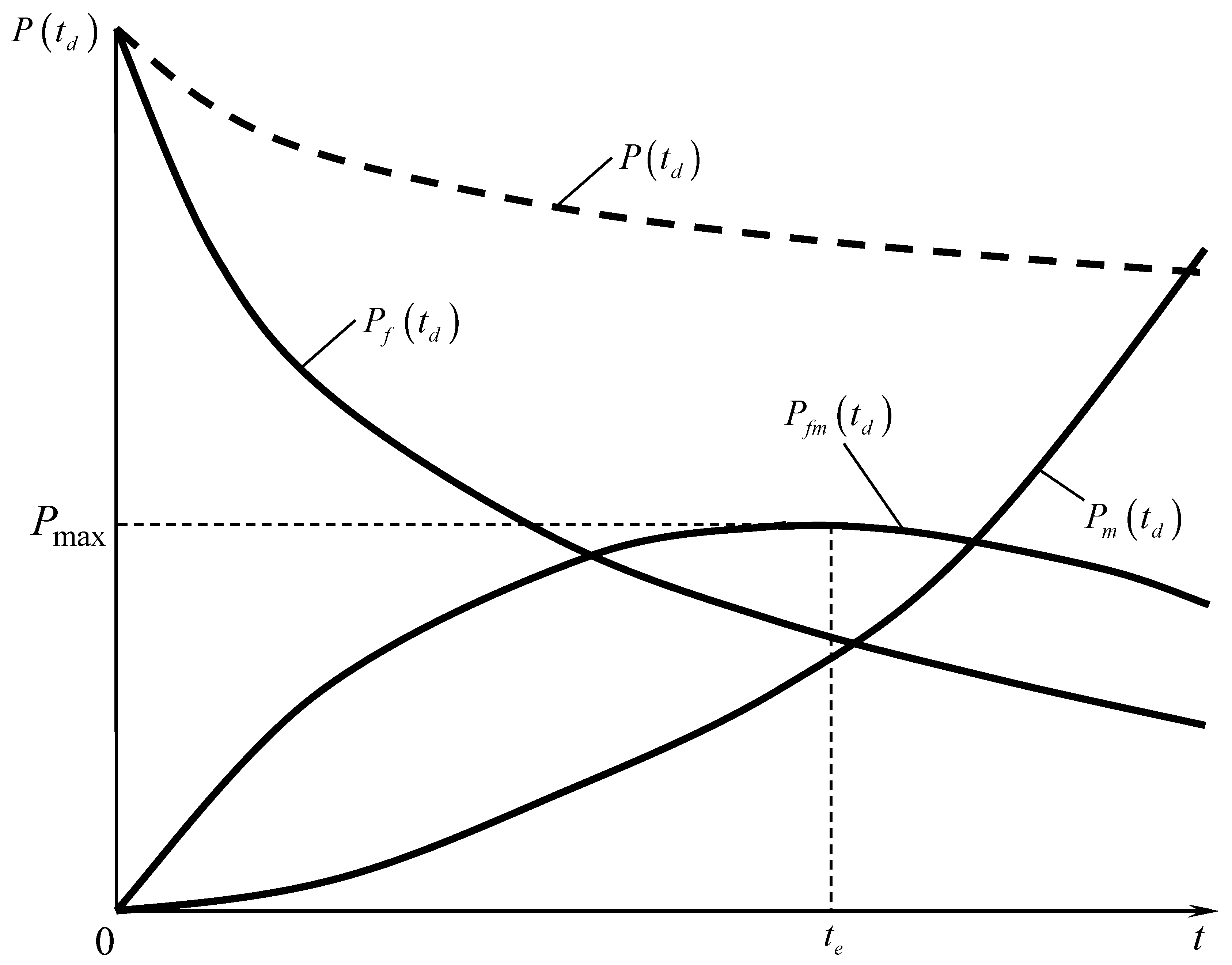
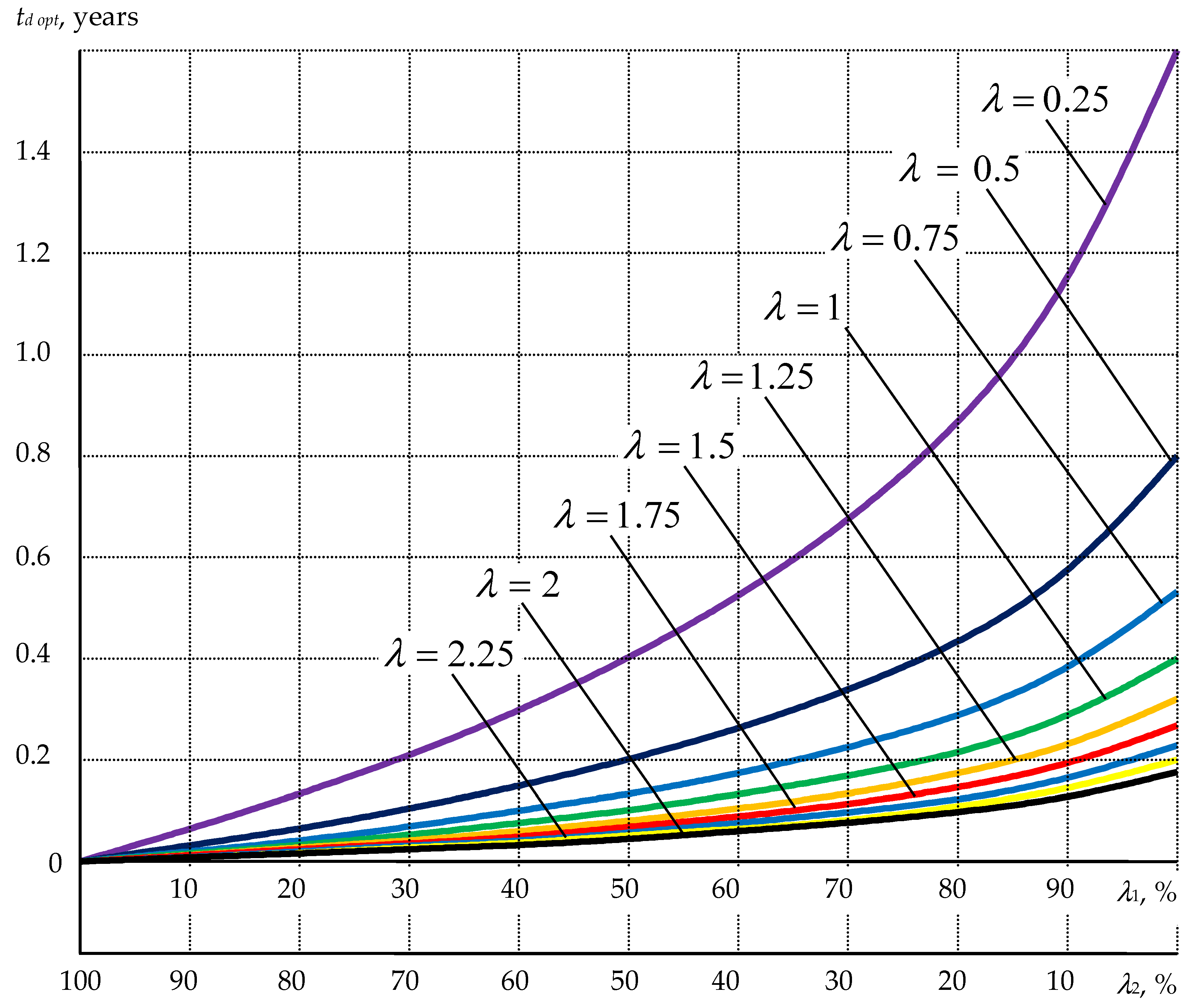
- The effect of fault balance λ1 and failures λ2 in the sum of faults and failures λ on the optimal time between adjustments td opt of electrical equipment is investigated. It is concluded that td opt depends on the balance of faults λ1 and failures λ2. The calculation of optimum between-diagnostic periods of t trolleybus electrical equipment td opt with different balance of failures λ1 and failures λ2 was achieved.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Campbell, R.J. CRS Report for Congress: Weather-Related Power Outages and Electric System Resiliency. 2012. Available online: https://sgp.fas.org/crs/misc/R42696.pdf (accessed on 3 December 2021).
- Wang, Y.; Chen, C.; Wang, J.; Baldick, R. Research on Resilience of Power Systems under Natural Disasters—A Review. IEEE Trans. Power Syst. 2016, 31, 1604–1613. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling the Performance of an Electric Vehicle Considering Various Driving Cycles. Mathematics 2023, 11, 2586. [Google Scholar] [CrossRef]
- Ehsani, M.; Wang, F.-Y.; Brosch, G.L. (Eds.) Transportation Technologies for Sustainability; Springer: New York, NY, USA, 2013. [Google Scholar]
- Chan, C.C.; Bouscayrol, A.; Chen, K. Electric, Hybrid, and Fuel-Cell Vehicles: Architectures and Modeling. IEEE Trans. Veh. Technol. 2010, 59, 589–598. [Google Scholar] [CrossRef]
- Colvile, R.N.; Hutchinson, E.J.; Mindell, J.S.; Warren, R.F. The transport sector as a source of air pollution. Atmos. Environ. 2001, 35, 1537–1565. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, Z. Structural System Reliability Analysis Based on Improved Explicit Connectivity BNs. KSCE J. Civ. Eng. 2018, 22, 916–927. [Google Scholar] [CrossRef]
- Malozyomov, B.V.; Martyushev, N.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling of Mechanical Forces and Power Balance in Electromechanical Energy Converter. Mathematics 2023, 11, 2394. [Google Scholar] [CrossRef]
- Xia, Q.; Wang, Z.; Ren, Y.; Sun, B.; Yang, D.; Feng, Q. A reliability design method for a lithium-ion battery pack considering the thermal disequilibrium in electric vehicles. J. Power Sources 2018, 386, 10–20. [Google Scholar] [CrossRef]
- Mingers, J. A critique of statistical modelling from a critical realist perspective. In Proceedings of the 11th European Conference on Information Systems, ECIS 2003, Naples, Italy, 16–21 June 2003; pp. 1277–1288. [Google Scholar]
- Wang, Q.A.; Zhang, C.; Ma, Z.G.; Ni, Y.Q. Modelling and forecasting of SHM strain measurement for a large-scale suspension bridge during typhoon events using variational heteroscedastic Gaussian process. Eng. Struct. 2022, 251, 113554. [Google Scholar] [CrossRef]
- Balagurusamy, E. Reliability Engineering, First. P-24, Green Park Extension; McGraw Hill Education (India) Private Limited: New Delhi, India, 2002. [Google Scholar]
- Oluwasuji, O.I.; Malik, O.; Zhang, J.; Ramchurn, S.D. Solving the fair electric load shedding problem in developing countries. Auton. Agents Multi-Agent Syst. 2019, 34, 12. [Google Scholar] [CrossRef]
- Malozyomov, B.V.; Golik, V.I.; Brigida, V.; Kukartsev, V.V.; Tynchenko, Y.A.; Boyko, A.A.; Tynchenko, S.V. Substantiation of Drilling Parameters for Undermined Drainage Boreholes for Increasing Methane Production from Unconventional Coal-Gas Collectors. Energies 2023, 16, 4276. [Google Scholar] [CrossRef]
- Lacey, G.; Putrus, G.; Bentley, E. Smart EV charging schedules: Supporting the grid and protecting battery life. IET Electr. Syst. Transp. 2017, 7, 84–91. [Google Scholar] [CrossRef]
- Aggarwal, K.K. Maintainability and Availability, Topics in Safety Reliability and Quality; Springer: Dordrecht, The Netherlands, 1993. [Google Scholar]
- Shu, X.; Guo, Y.; Yang, W.; Wei, K.; Zhu, Y.; Zou, H. A Detailed Reliability Study of the Motor System in Pure Electric Vans by the Approach of Fault Tree Analysis. IEEE Access 2020, 8, 5295–5307. [Google Scholar] [CrossRef]
- Shchurov, N.I.; Myatezh, S.V.; Malozyomov, B.V.; Shtang, A.A.; Martyushev, N.V.; Klyuev, R.V.; Dedov, S.I. Determination of Inactive Powers in a Single-Phase AC Network. Energies 2021, 14, 4814. [Google Scholar] [CrossRef]
- Shchurov, N.I.; Dedov, S.I.; Malozyomov, B.V.; Shtang, A.A.; Martyushev, N.V.; Klyuev, R.V.; Andriashin, S.N. Degradation of Lithium-Ion Batteries in an Electric Transport Complex. Energies 2021, 14, 8072. [Google Scholar] [CrossRef]
- Malozyomov, B.V.; Martyushev, N.V.; Kukartsev, V.A.; Kukartsev, V.V.; Tynchenko, S.V.; Klyuev, R.V.; Zagorodnii, N.A.; Tynchenko, Y.A. Study of Supercapacitors Built in the Start-Up System of the Main Diesel Locomotive. Energies 2023, 16, 3909. [Google Scholar] [CrossRef]
- Xia, Q.; Wang, Z.; Ren, Y.; Tao, L.; Lu, C.; Tian, J.; Hu, D.; Wang, Y.; Su, Y.; Chong, J.; et al. A modified reliability model for lithium-ion battery packs based on the stochastic capacity degradation and dynamic response impedance. J. Power Sources 2019, 423, 40–51. [Google Scholar] [CrossRef]
- Isametova, M.E.; Nussipali, R.; Martyushev, N.V.; Malozyomov, B.V.; Efremenkov, E.A.; Isametov, A. Mathematical Modeling of the Reliability of Polymer Composite Materials. Mathematics 2022, 10, 3978. [Google Scholar] [CrossRef]
- Bolvashenkov, I.; Herzog, H.-G. Approach to predictive evaluation of the reliability of electric drive train based on a stochastic model. In Proceedings of the 2015 International Conference on Clean Electrical Power (ICCEP), Taormina, Italy, 16–18 June 2015; pp. 486–492. [Google Scholar]
- Ammaiyappan, B.S.; Ramalingam, S. Reliability investigation of electric vehicles. Life Cycle Reliab. Saf. Eng. 2019, 8, 141–149. [Google Scholar] [CrossRef]
- Alberta Utilities Commission. Waterton Battery Energy Storage System. 2021. Available online: https://efiling-webapi.auc.ab.ca/Document/Get/683303 (accessed on 3 December 2021).
- Li, J.; Niu, D.; Wu, M.; Wang, Y.; Li, F.; Dong, H. Research on Battery Energy Storage as Backup Power in the Operation Optimization of a Regional Integrated Energy System. Energies 2018, 11, 2990. [Google Scholar] [CrossRef]
- HSB. Maintaining Emergency and Standby Engine-Generator Sets. 2020. Available online: https://www.munichre.com/content/dam/munichre/global/content-pieces/documents/447-Recommended-Practice-for-Maintaining-Emergency-and-StandbyEngine-Generator-Sets.pdf/_jcr_content/renditions/original.media_file.download_attachment.file/447-RecommendedPractice-for-Maintainig-Emergency-and-Standby-Engine-Generator-Sets.pdf (accessed on 13 January 2022).
- International Energy Agency. Global EV Outlook 2021 Overview; International Energy Agency: Paris, France, 2021.
- Electric Vehicle Database Useable Battery Capacity of Fully Electric Vehicles Cheatsheet—EV Database. Available online: https://ev-database.org/cheatsheet/useable-battery-capacity-electric-car (accessed on 3 December 2021).
- Salvatti, G.A.; Carati, E.G.; Cardoso, R.; da Costa, J.P.; Stein, C.M.D.O. Electric Vehicles Energy Management with V2G/G2V Multifactor Optimization of Smart Grids. Energies 2020, 13, 1191. [Google Scholar] [CrossRef]
- Kasturi, K.; Nayak, C.K.; Nayak, M.R. Electric vehicles management enabling G2V and V2G in smart distribution system for maximizing profits using MOMVO. Int. Trans. Electr. Energy Syst. 2019, 29, e12013. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. Reliability Evaluation of Engineering Systems; Springer: Boston, MA, USA, 1992. [Google Scholar]
- Malozyomov, B.V.; Kukartsev, V.V.; Martyushev, N.V.; Kondratiev, V.V.; Klyuev, R.V.; Karlina, A.I. Improvement of Hybrid Electrode Material Synthesis for Energy Accumulators Based on Carbon Nanotubes and Porous Structures. Micromachines 2023, 14, 1288. [Google Scholar] [CrossRef]
- Malozyomov, B.V.; Martyushev, N.V.; Kukartsev, V.V.; Tynchenko, V.S.; Bukhtoyarov, V.V.; Wu, X.; Tyncheko, Y.A.; Kukartsev, V.A. Overview of Methods for Enhanced Oil Recovery from Conventional and Unconventional Reservoirs. Energies 2023, 16, 4907. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. Reliability Evaluation of Power Systems, 2nd ed.; Springer: Boston, MA, USA, 1996. [Google Scholar]
- Martyushev, N.V.; Malozyomov, B.V.; Khalikov, I.H.; Kukartsev, V.A.; Kukartsev, V.V.; Tynchenko, V.S.; Tynchenko, Y.A.; Qi, M. Review of Methods for Improving the Energy Efficiency of Electrified Ground Transport by Optimizing Battery Consumption. Energies 2023, 16, 729. [Google Scholar] [CrossRef]
- Li, X.; Tan, Y.; Liu, X.; Liao, Q.; Sun, B.; Cao, G.; Li, C.; Yang, X.; Wang, Z. A cost-benefit analysis of V2G electric vehicles supporting peak shaving in Shanghai. Electr. Power Syst. Res. 2020, 179, 106058. [Google Scholar] [CrossRef]
- Yoo, Y.; Al-Shawesh, Y.; Tchagang, A. Coordinated control strategy and validation of vehicle-to-grid for frequency control. Energies 2021, 14, 2530. [Google Scholar] [CrossRef]
- Haghi, H.V.; Qu, Z. A Kernel-Based Predictive Model of EV Capacity for Distributed Voltage Control and Demand Response. IEEE Trans. Smart Grid 2018, 9, 3180–3190. [Google Scholar] [CrossRef]
- Agarwal, L.; Peng, W.; Goel, L. Using EV battery packs for vehicle-to-grid applications: An economic analysis. In Proceedings of the 2014 IEEE Innovative Smart Grid Technologies—Asia (ISGT ASIA), Kuala Lumpur, Malaysia, 20–23 May 2014; IEEE Computer Society: Piscataway Township, NJ, USA, 2014; pp. 663–668. [Google Scholar]
- Kataoka, R.; Ogimoto, K.; Iwafune, Y. Marginal Value of Vehicle-to-Grid Ancillary Service in a Power System with Variable Renewable Energy Penetration and Grid Side Flexibility. Energies 2021, 14, 7577. [Google Scholar] [CrossRef]
- Martyushev, N.V.; Malozyomov, B.V.; Sorokova, S.N.; Efremenkov, E.A.; Qi, M. Mathematical Modeling of the State of the Battery of Cargo Electric Vehicles. Mathematics 2023, 11, 536. [Google Scholar] [CrossRef]
- Młyńczak, M.; Nowakowski, T.; Restel, F.; Werbin´ska-Wojciechowska, S. Problems of Reliability Analysis of Passenger Transportation Process. In Proceedings of the European Safety and Reliability Conference, Balkema, Leiden, The Netherlands, 2–4 October 2011; pp. 1433–1438. [Google Scholar]
- Chakrabarti, S. The Demand for Reliable Transit Service: New Evidence Using Stop Level Data from the Los Angeles Metro Bus. System. J. Transp. Geogr. 2015, 48, 154–164. [Google Scholar] [CrossRef]
- Fricker, J.D.; Whitford, R.K. Fundamentals of Transportation Engineering. A Multimodal Systems Approach; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2004; pp. 243–276. [Google Scholar]
- Barabino, B.; Di Francesco, M.; Mozzoni, S. An Offline Framework for the Diagnosis of Time Reliability by Automatic Vehicle Location Data. IEEE Trans. Intell. Transp. Syst. 2016, 18, 583–594. [Google Scholar] [CrossRef]
- Barabino, B.; Di Francesco, M.; Mozzoni, S. Time Reliability Measures in bus Transport Services from the Accurate use of Automatic Vehicle Location raw Data. Qual. Reliab. Eng. Int. 2017, 33, 969–978. [Google Scholar] [CrossRef]
- Pulugurtha, S.S.; Imran, M.S. Modeling Basic Freeway Section Level-of-Service Based on Travel Time and Reliability. Case Stud. Transp. Policy 2020, 8, 127–134. [Google Scholar] [CrossRef]
- Yang, W.; Xiang, Y.; Liu, J.; Gu, C. Agent-Based Modeling for Scale Evolution of Plug-in Electric Vehicles and Charging Demand. IEEE Trans. Power Syst. 2018, 33, 1915–1925. [Google Scholar] [CrossRef]
- Nie, Y.; Chung, C.Y.; Xu, N.Z. System State Estimation Considering EV Penetration with Unknown Behavior Using Quasi-Newton Method. IEEE Trans. Power Syst. 2016, 31, 4605–4615. [Google Scholar] [CrossRef]
- Gong, H.; Ionel, D.M. Optimization of aggregated EV power in residential communities with smart homes. In Proceedings of the 2020 IEEE Transportation Electrification Conference and Expo, ITEC 2020, Chicago, IL, USA, 23–26 June 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 779–782. [Google Scholar]
- U.S. Department of Transportation. 2017 NHTS Data User Guide; Federal Highway Administration Office of Policy Information: Washington, DC, USA, 2018.
- Zhang, P.; Qian, K.; Zhou, C.; Stewart, B.G.; Hepburn, D.M. A methodology for optimization of power systems demand due to electric vehicle charging load. IEEE Trans. Power Syst. 2012, 27, 1628–1636. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. n/a | Type of Electrical Equipment | λ, 1/Year | Confidence Interval at α = 0.9 | T, Year | tdopt, Year × 10−2 | kreturns | |
|---|---|---|---|---|---|---|---|
| λl | λu | ||||||
| 1 | Circuit breaker (CB) | 2.015 | 1.914 | 2.156 | 0.46 | 2.31 | 0.225 |
| 2 | Traction motor (TED) | 3.235 | 3.073 | 3.461 | 0.28 | 0.72 | 0.218 |
| 3 | Auxiliary motor (AP) | 7.167 | 6.808 | 7.668 | 0.13 | 0.32 | 0.322 |
| 4 | Motor-compressor (MC) | 6.123 | 5.816 | 6.551 | 0.15 | 19.5 | 0.250 |
| 5 | Generator (D) | 3.055 | 2.902 | 3.268 | 0.30 | 0.76 | 0.186 |
| 6 | Current regulator relay (RRT) | 3.414 | 3.243 | 3.652 | 0.27 | 0.68 | 0.272 |
| 7 | Voltage relay (RN) | 3.235 | 3.073 | 3.461 | 0.28 | 0.72 | 0.274 |
| 8 | Current relay (CT) | 3.305 | 3.139 | 3.536 | 0.27 | 0.71 | 0.003 |
| 9 | Current collectors | 9.58 | 9.101 | 10.25 | 0.09 | 0.16 | 0.163 |
| 10 | Control circuit | 3.235 | 3.073 | 3.461 | 0.28 | 0.72 | 0.139 |
| 11 | Contactor | 17.85 | 16.95 | 19.09 | 0.05 | 0.13 | 0.197 |
| 12 | Starting and shunt resistors | 2.575 | 2.446 | 2.755 | 0.36 | 0.91 | 0.419 |
| 13 | Line contactor 4 and 5 | 1.667 | 1.583 | 1.783 | 0.56 | 3.08 | 0.091 |
| 14 | Leakage current | 4.735 | 4.498 | 5.066 | 0.19 | 0.49 | 0.393 |
| 15 | Controller and reverser | 4.378 | 4.159 | 4.684 | 0.21 | 0.53 | 0.233 |
| 16 | Battery | 4.735 | 4.498 | 5.066 | 0.19 | 0.85 | 0.296 |
| 17 | Pedals | 5.405 | 5.134 | 5.783 | 0.17 | 1.65 | 0.192 |
| 18 | Alarm system | 0.915 | 0.869 | 0.979 | 1.02 | 1.75 | 0.136 |
| 19 | Servomotor | 6.215 | 5.904 | 6.650 | 0.15 | 0.37 | 0.135 |
| 20 | Furnaces and lighting | 3.355 | 3.187 | 3.589 | 0.27 | 0.69 | 0.187 |
| T, Days | |||||||
|---|---|---|---|---|---|---|---|
| td = 3.5 | td = 7 | td = 14 | td = 28 | td = 56 | td = 112 | td = 224 | |
| 0.01 | 1.031 | 2.062 | 4.131 | 8.271 | 16.542 | 33.084 | 66.169 |
| 0.1 | 2.164 | 4.328 | 8.658 | 17.316 | 34.633 | 69.265 | 138.53 |
| 0.2 | 3.141 | 6.2822 | 12.561 | 25.122 | 50.244 | 100.489 | 200.98 |
| 0.3 | 4.231 | 8.462 | 16.927 | 33.854 | 67.709 | 135.42 | 270.84 |
| 0.4 | 5.592 | 11.184 | 22.368 | 44.737 | 89.474 | 178.95 | 357.89 |
| 0.5 | 7.424 | 14.849 | 29.699 | 59.397 | 118.79 | 237.59 | 475.18 |
| 0.6 | 10.112 | 20.224 | 40.441 | 80.882 | 161.76 | 323.53 | 647.05 |
| 0.7 | 14.522 | 29.051 | 58.091 | 116.18 | 232.36 | 464.72 | 929.45 |
| 0.8 | 23.272 | 46.541 | 93.089 | 186.18 | 372.36 | 744.71 | 1489.4 |
| 0.9 | 49.392 | 98.797 | 197.594 | 395.19 | 790.38 | 1580.8 | 3161.5 |
| 0.99 | 518.79 | 1037.6 | 2075.1 | 4150.3 | 8300.6 | 16,601 | 33,202 |
| No. n/a | Name of Equipment | Trunning, Days |
|---|---|---|
| 1 | Circuit breaker (CB) | 1.51 |
| 2 | Regulator relay (RR) | 1.24 |
| 3 | Voltage relay (RN) | 1.15 |
| 4 | Current relay (CT) | 1.08 |
| 5 | Control circuit | 1.49 |
| 6 | Line contactor LK4, LK5 | 2.20 |
| 7 | Group rheostat controller and reverser | 1.83 |
| 8 | Control controller | 2.15 |
| 9 | Field weakening contactor | 1.71 |
| Month | td opt, Days | td opt max, Days | td opt min, Days |
|---|---|---|---|
| January | 8.1 | 8.9 | 7.5 |
| February | 8.5 | 9.3 | 7.9 |
| March | 6.1 | 6.7 | 5.6 |
| April | 5.1 | 5.6 | 4.7 |
| May | 5.1 | 5.7 | 4.7 |
| June | 6.7 | 7.3 | 6.1 |
| July | 11.0 | 12.0 | 10.0 |
| August | 7.3 | 8.0 | 6.7 |
| September | 9.0 | 10.5 | 8.8 |
| October | 9.3 | 10.0 | 8.5 |
| November | 9.8 | 9.8 | 8.7 |
| December | 9.7 | 9.3 | 8.9 |
| Malfunction λ1, % | 0 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Failures λ2, % | 100 | 90 | 80 | 70 | 60 | 50 | 40 | 30 | 20 | 10 | 0 | |
| λ = 0.05 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.33 | 0.64 | 0.98 | 1.11 | 1.3 | 1.72 | 2.31 | 3.01 | 3.9 | 8 | |
| λ = 0.25 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.16 | 0.33 | 0.52 | 0.74 | 1 | 1.30 | 1.67 | 2.14 | 2.79 | 4 | |
| λ = 0.5 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.08 | 0.16 | 0.26 | 0.37 | 0.5 | 0.65 | 0.84 | 1.07 | 1.39 | 2 | |
| λ = 0.75 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.05 | 0.1 | 0.17 | 0.25 | 0.33 | 0.43 | 0.56 | 0.71 | 0.93 | 1.33 | |
| λ = 1 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 | |
| λ = 1.25 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.03 | 0.07 | 0.10 | 0.15 | 0.20 | 0.26 | 0.33 | 0.43 | 0.56 | 0.8 | |
| λ = 1.5 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.03 | 0.06 | 0.09 | 0.12 | 0.17 | 0.22 | 0.28 | 0.36 | 0.47 | 0.67 | |
| λ = 1.75 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.02 | 0.05 | 0.08 | 0.10 | 0.14 | 0.19 | 0.24 | 0.30 | 0.40 | 0.57 | |
| λ = 2 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.02 | 0.04 | 0.07 | 0.09 | 0.13 | 0.16 | 0.20 | 0.27 | 0.35 | 0.5 | |
| λ = 2.25 | Pmax, r.u. | 0 | 0.04 | 0.08 | 0.13 | 0.19 | 0.25 | 0.33 | 0.42 | 0.53 | 0.70 | 1 |
| td opt, years | 0 | 0.02 | 0.04 | 0.06 | 0.08 | 0.11 | 0.15 | 0.19 | 0.24 | 0.31 | 0.44 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malozyomov, B.V.; Martyushev, N.V.; Konyukhov, V.Y.; Oparina, T.A.; Zagorodnii, N.A.; Efremenkov, E.A.; Qi, M. Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses. Mathematics 2023, 11, 3260. https://doi.org/10.3390/math11153260
Malozyomov BV, Martyushev NV, Konyukhov VY, Oparina TA, Zagorodnii NA, Efremenkov EA, Qi M. Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses. Mathematics. 2023; 11(15):3260. https://doi.org/10.3390/math11153260
Chicago/Turabian StyleMalozyomov, Boris V., Nikita V. Martyushev, Vladimir Yu. Konyukhov, Tatiana A. Oparina, Nikolay A. Zagorodnii, Egor A. Efremenkov, and Mengxu Qi. 2023. "Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses" Mathematics 11, no. 15: 3260. https://doi.org/10.3390/math11153260
APA StyleMalozyomov, B. V., Martyushev, N. V., Konyukhov, V. Y., Oparina, T. A., Zagorodnii, N. A., Efremenkov, E. A., & Qi, M. (2023). Mathematical Analysis of the Reliability of Modern Trolleybuses and Electric Buses. Mathematics, 11(15), 3260. https://doi.org/10.3390/math11153260