
Finite-Sized Orbiter’s Motion around the Natural Moons of Planets with Slow-Variable Eccentricity of Their Orbit in ER3BP





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Basic System for Semi-Analytical Solving of Equations (1)–(4)
3. Introducing the Variable Eccentricity e(f) in Equation (5)
4. Semi-Analytical Presentation of Equation (5) for Further Solving Procedure
5. Graphical Plots for Approximate Solutions and Numerical Findings for Equations (12) and (14)
- –
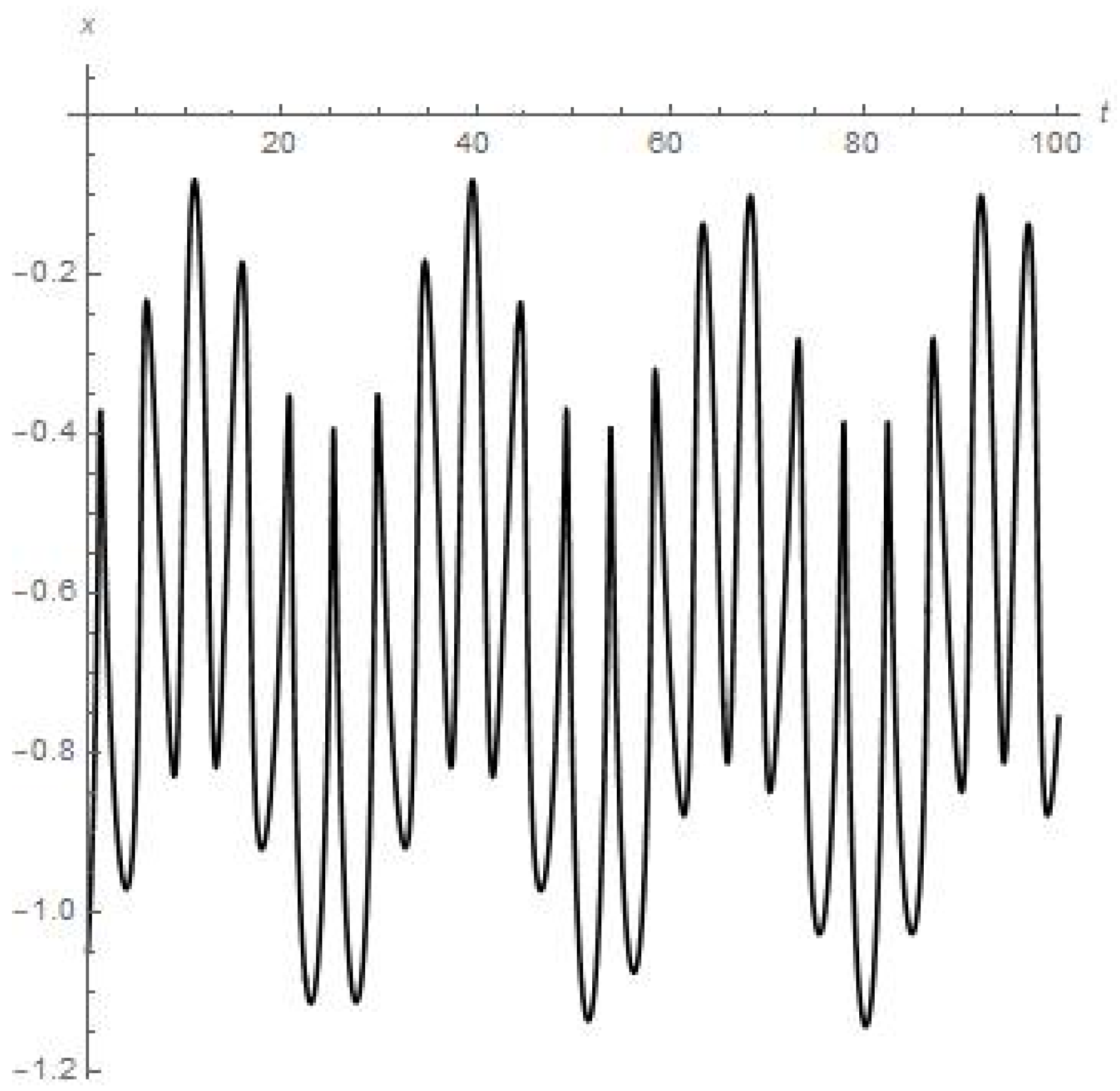
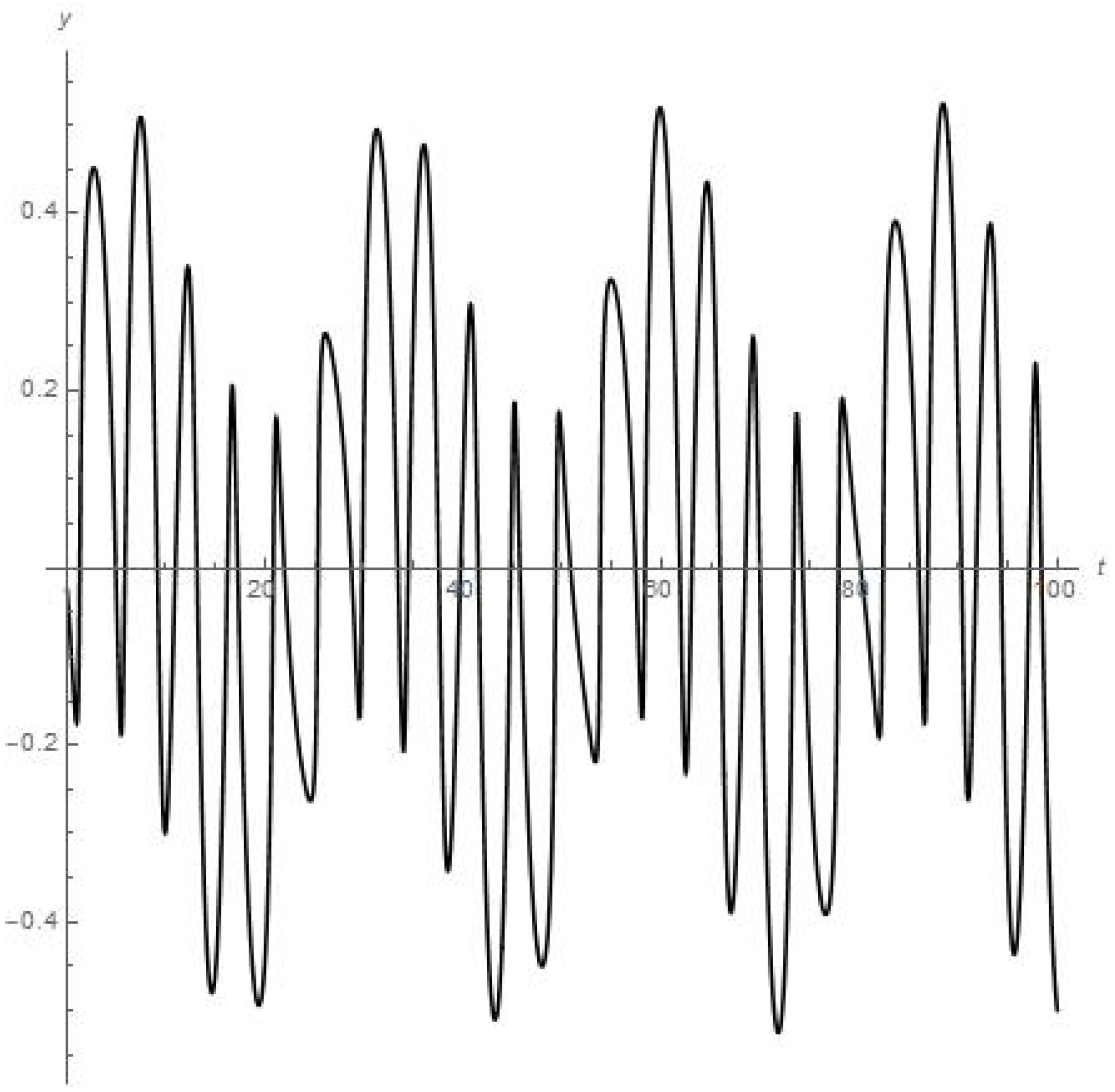
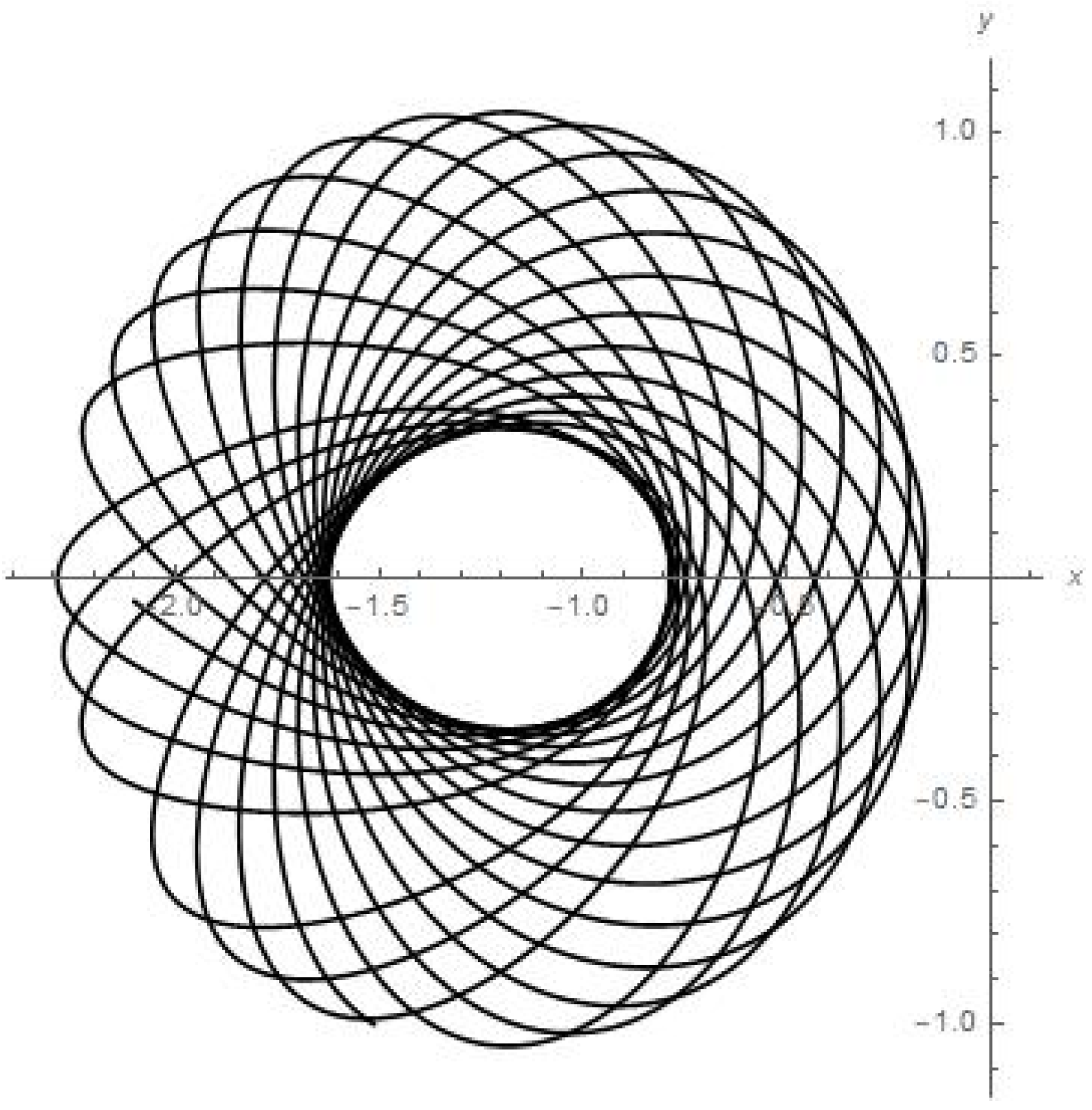
- Figure 1 and Figure 2 present the results of numerical experiment for the coordinates {x, y}. We can see that coordinates {x, y} are oscillating, each in a stable regime over a long period of time t (e.g., coordinate y experiences eight peaks of oscillations over 28 days or the first full angular turn of the moon around Earth starting from the initial point);
- –
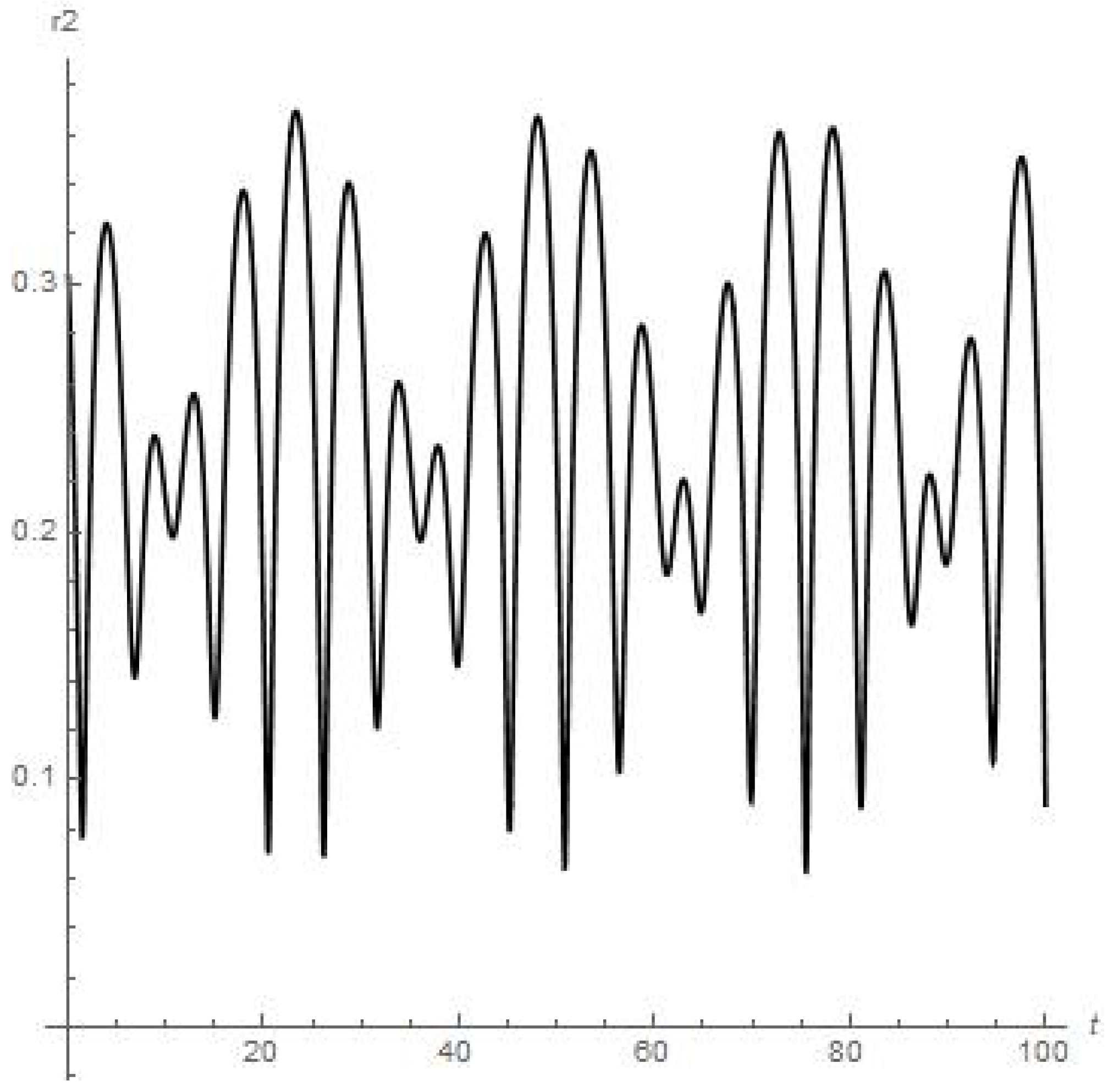
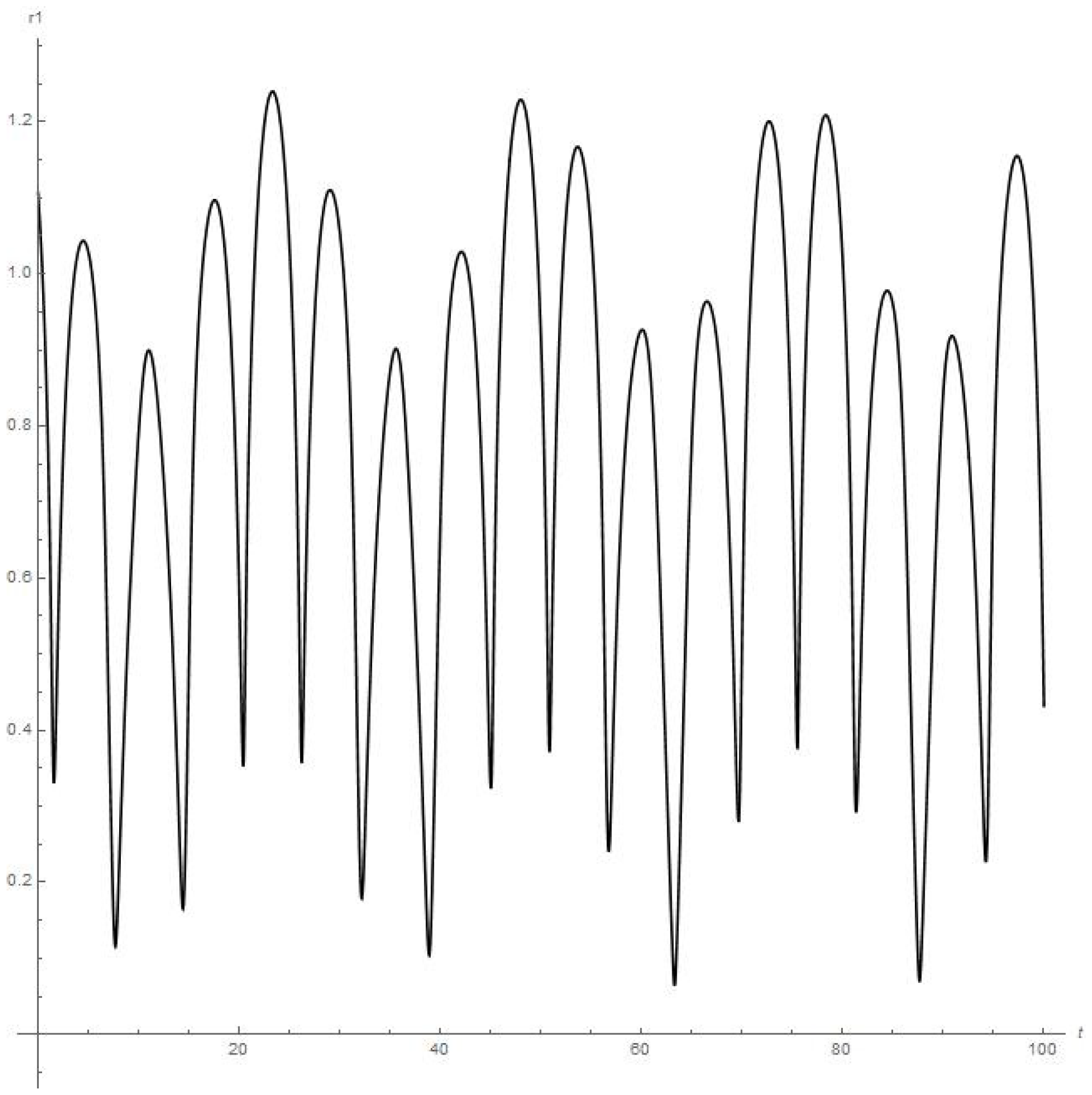
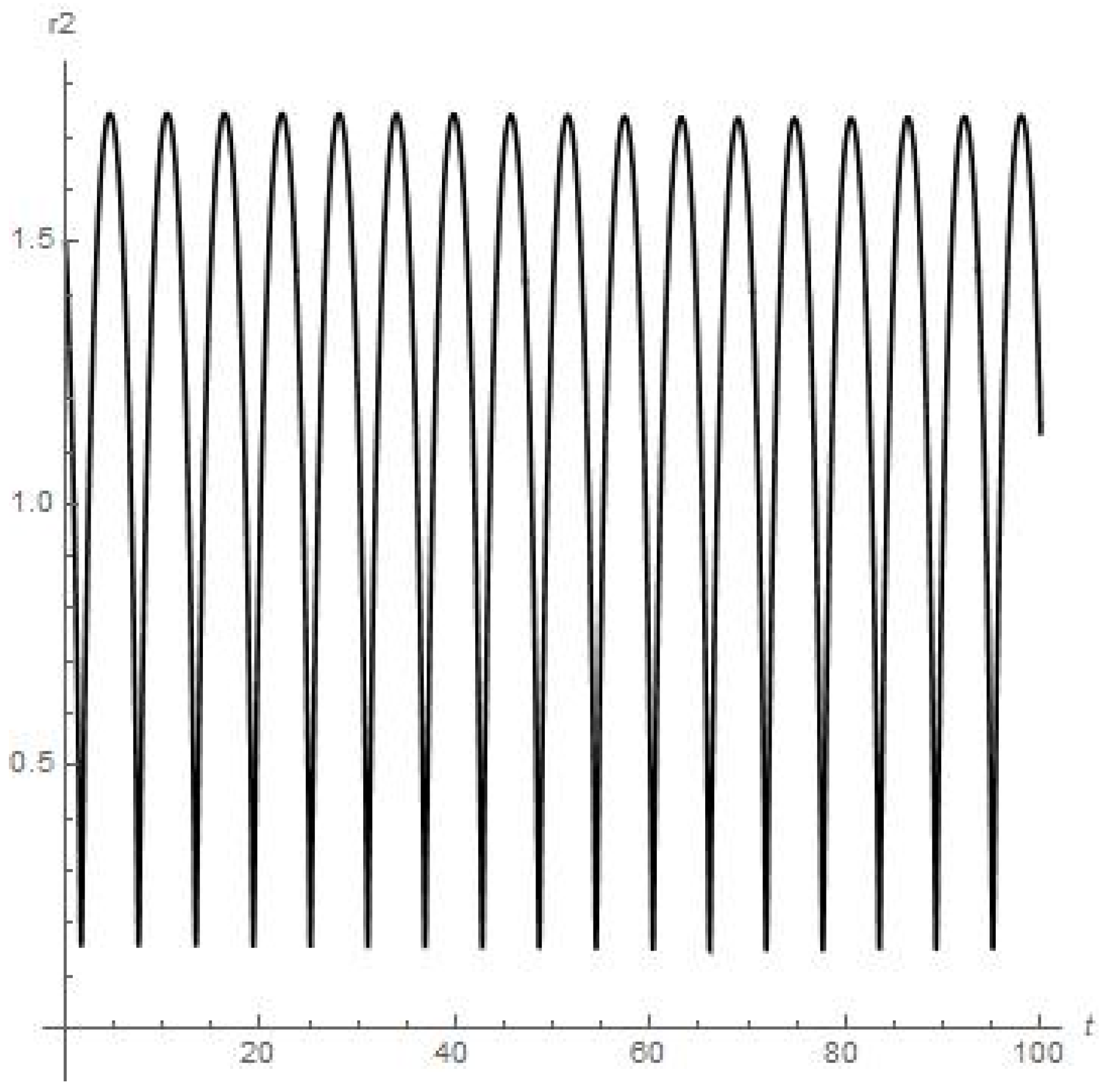
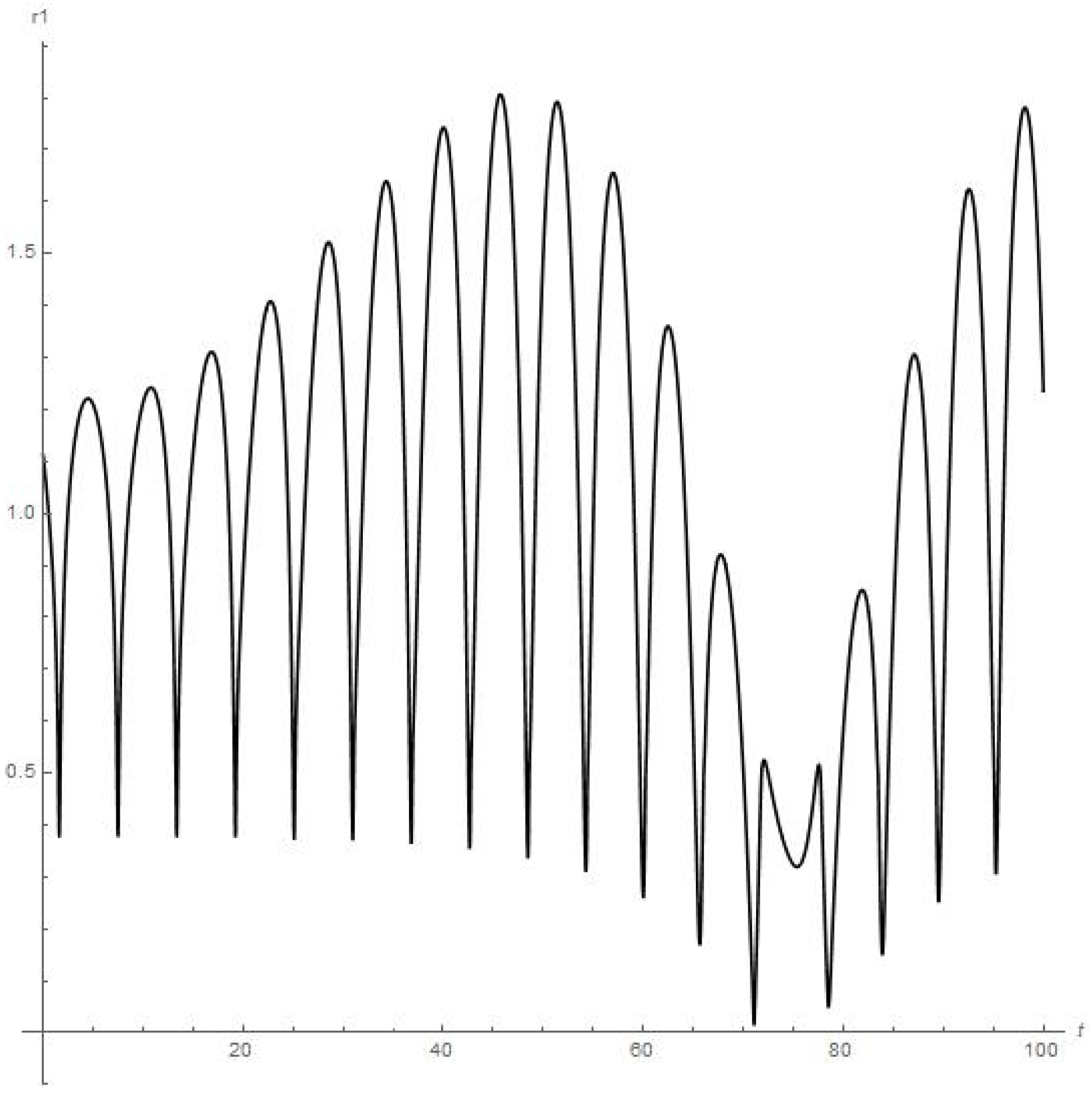
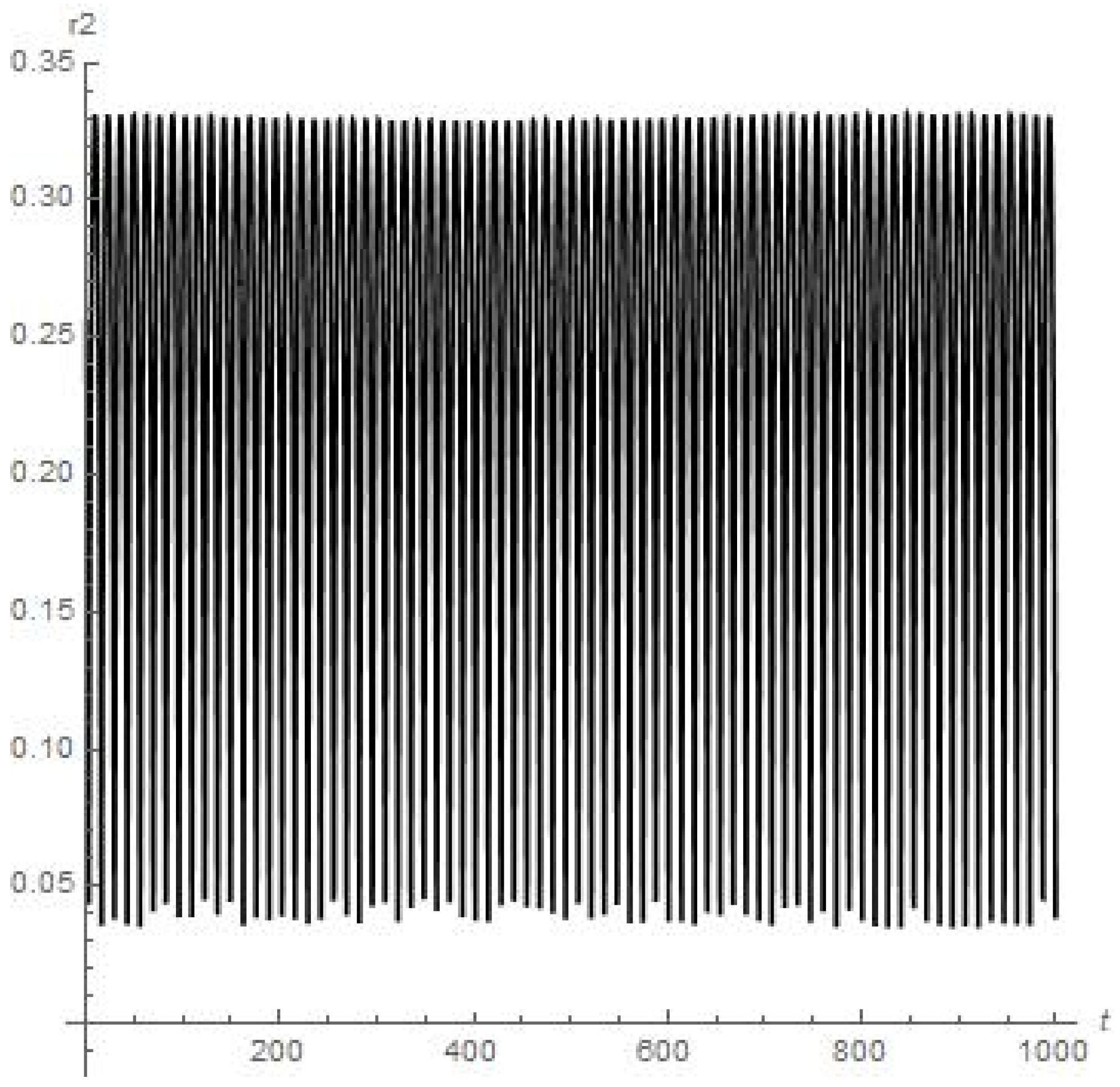
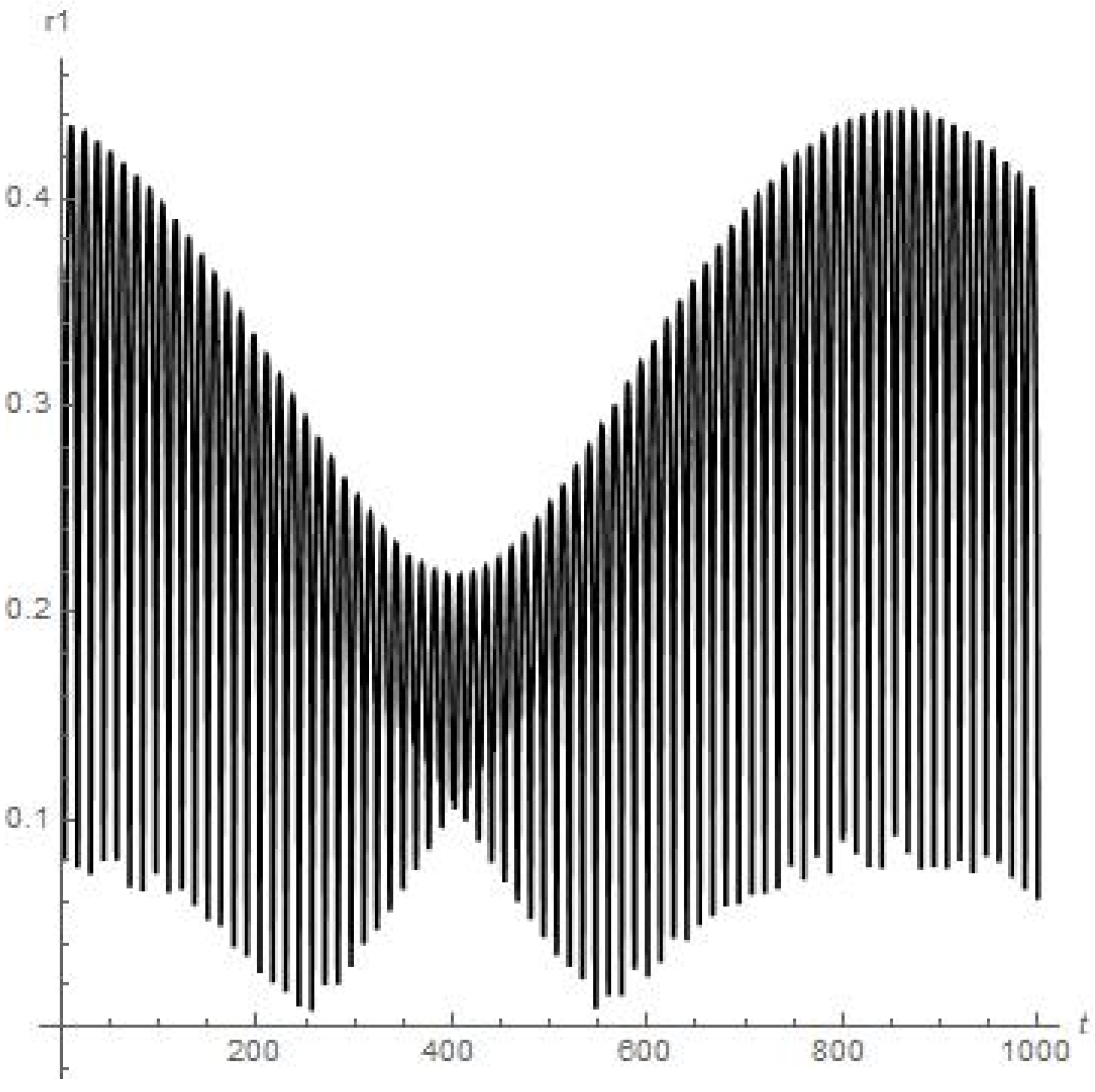
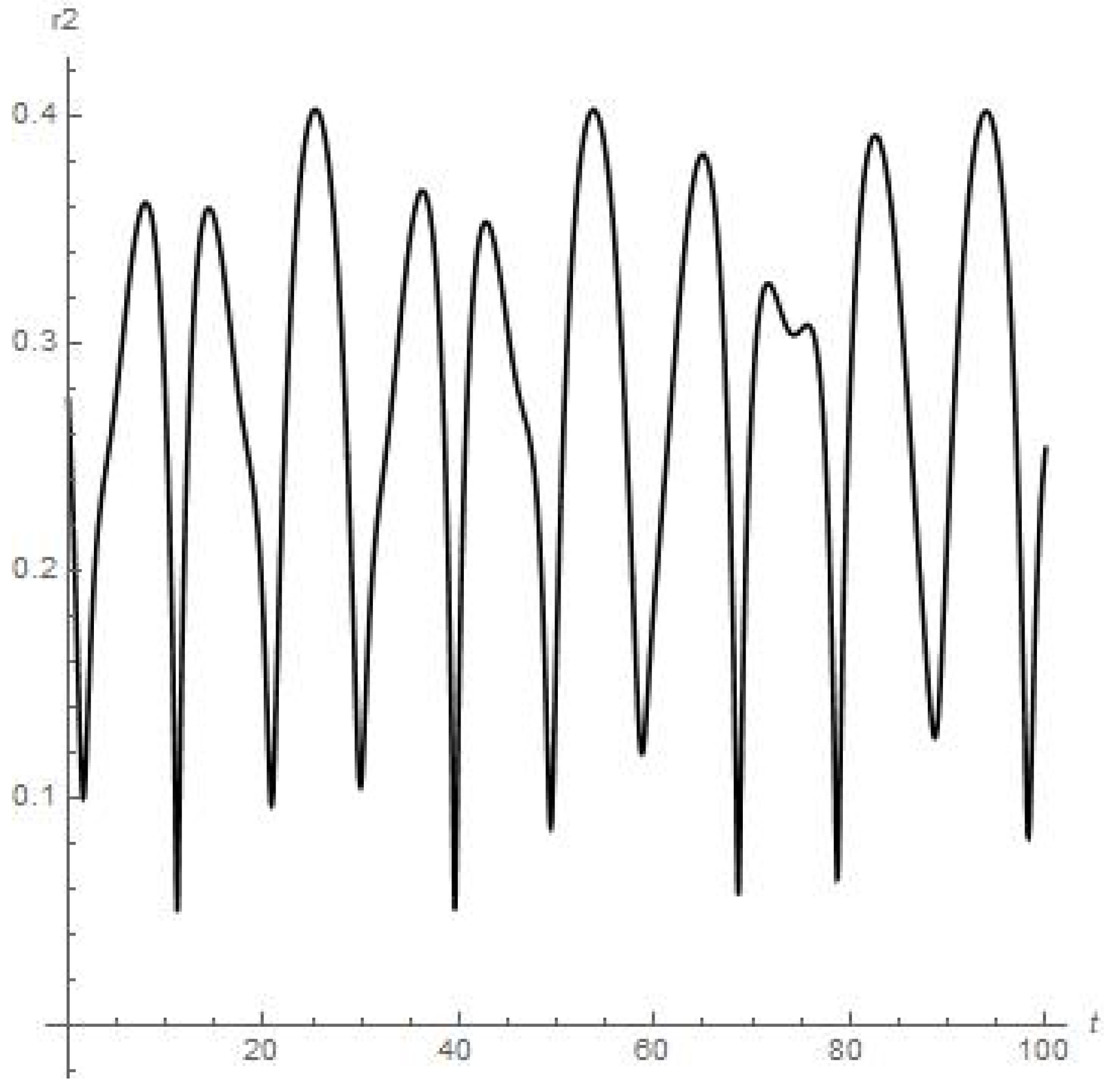
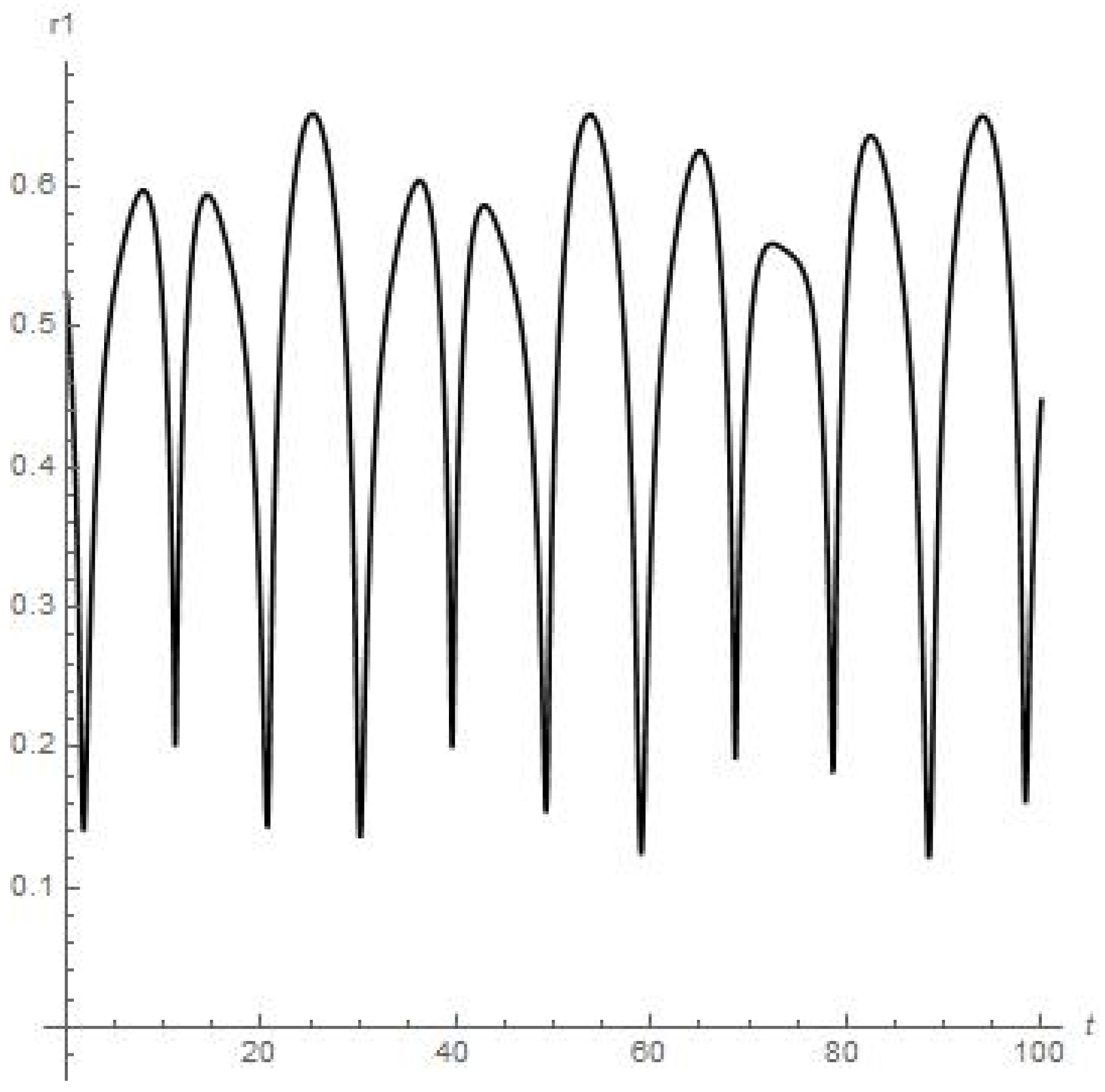
- Figure 3 and Figure 4 present the results of the numerical calculations for the distances , of planetoid m from the moon and from Earth, respectively. Namely, we can see from Figure 3 that distance is stably oscillating (there are also six peaks of oscillations over 28 days or the first full angular turn of the moon around Earth starting from the initial point) with an obvious further approx. stable regime over a long period of time. But the orbiter experiences a sufficiently close approach to Earth at the 63th day of orbiting around the moon (0.06 on Figure 4 or circa 23 × km);
- –
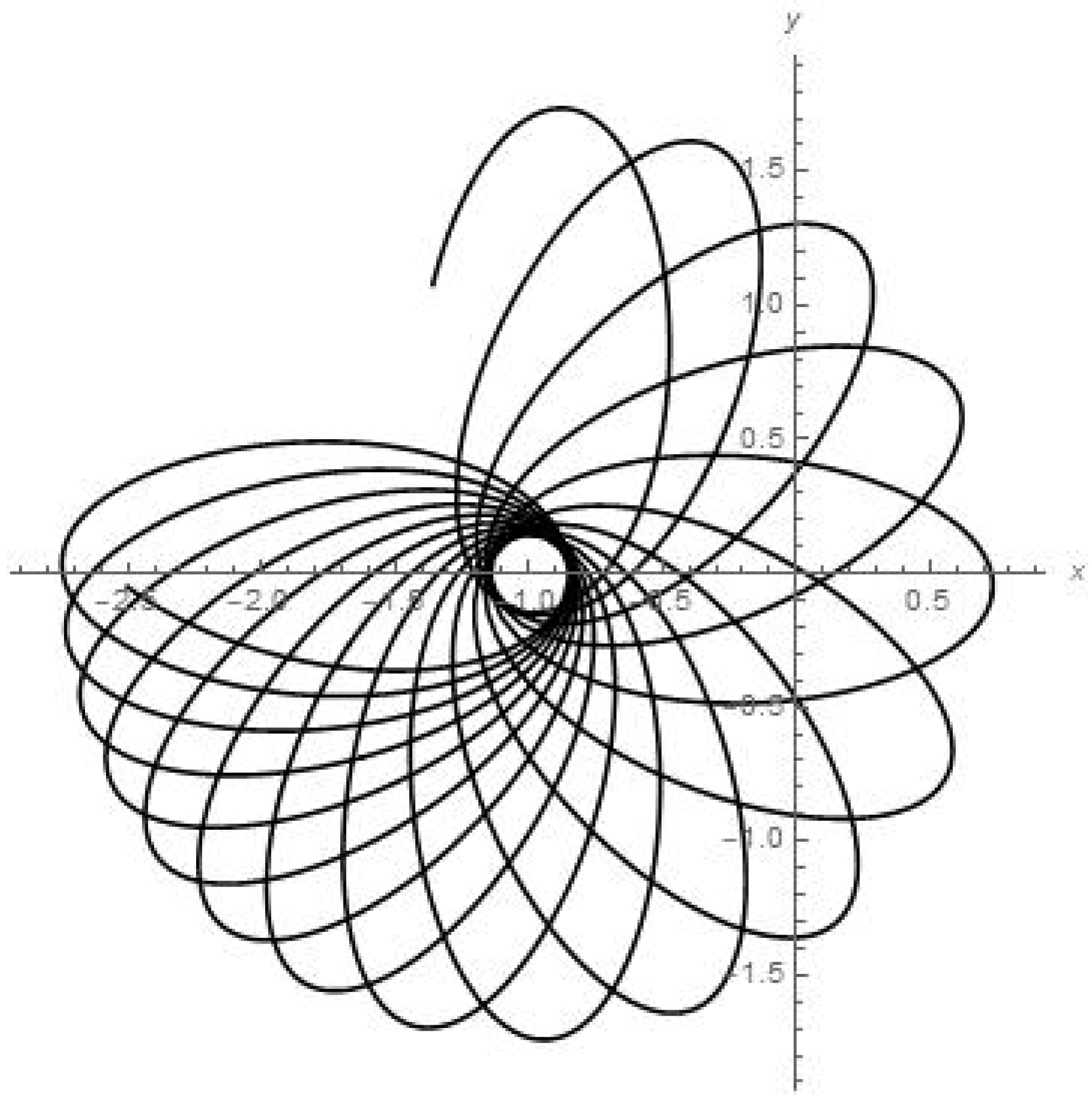
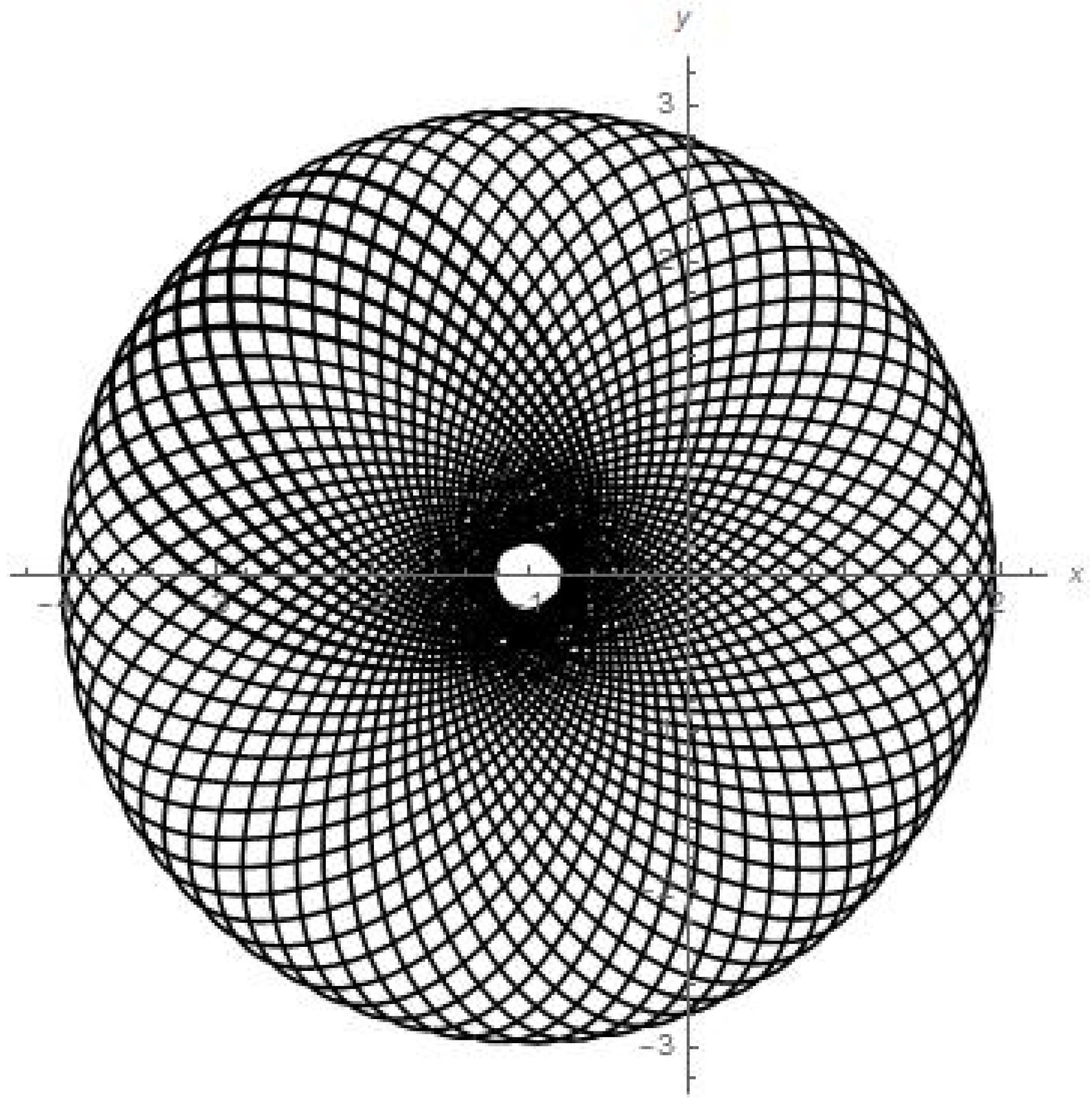
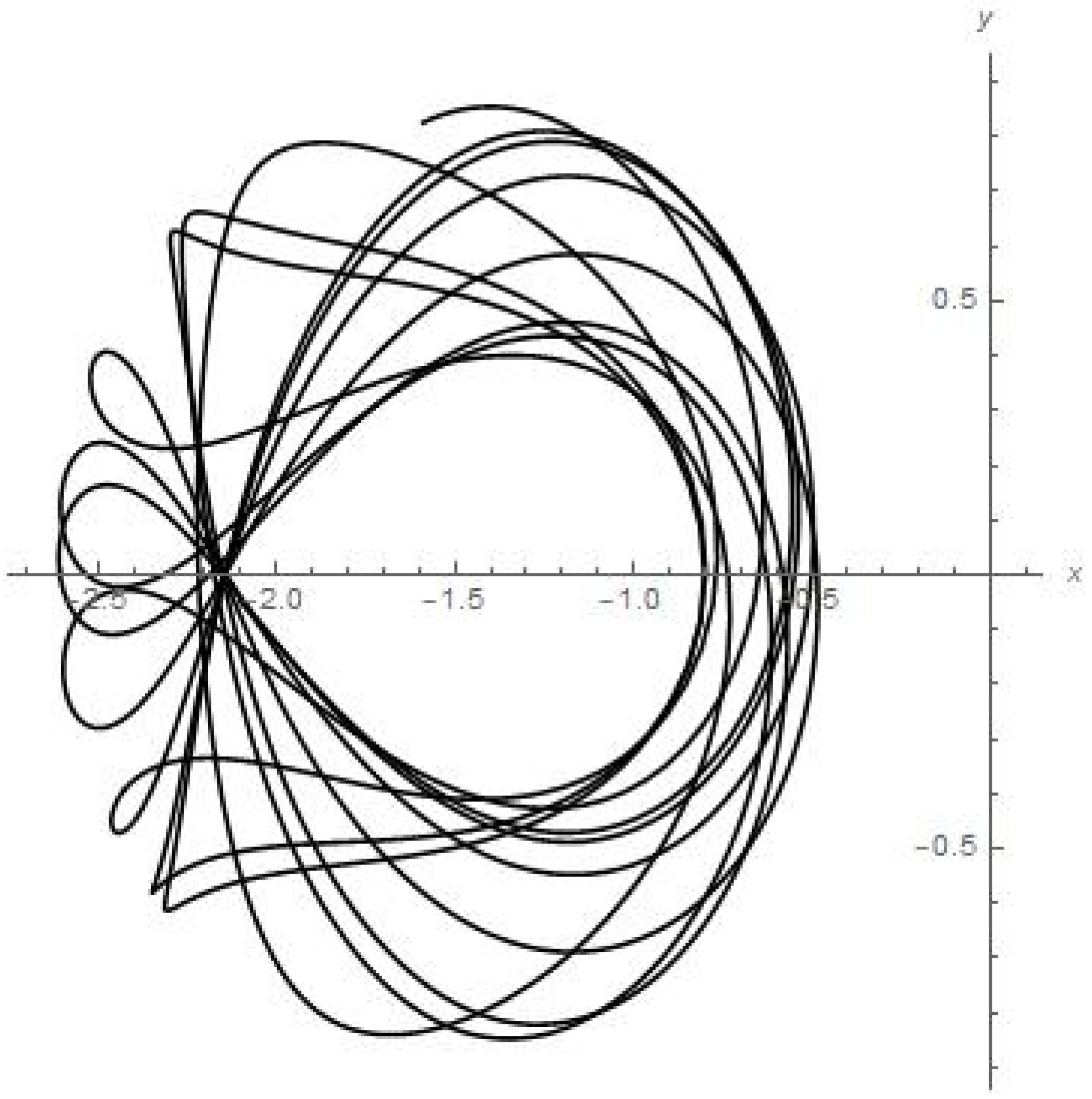
- Figure 5 presents the numerical calculations for the trajectory of the planetoid in {x, y} plane. We can see that the small satellite is apparently stably oscillating with a shifted rate of angle precession around its initial position (of beginning the motion) in its quasi-elliptic trajectory between the attracting mass of Earth and attracting mass of the moon.
6. Discussion and Conclusions
- (1)
- constant Q for tidal evolution (not our choice; for example, see reference [34]);
- (2)
- approximation assuming “constant time lag” in the equilibrium tide model of tidal friction (this model was used, e.g., in the REBOUND integrator, see reference [35]);
- (3)
- the quality factor Q of the primary is assumed to be dependent on the tidal-flexure frequency (definitely our choice; see reference [17]).
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Mathematical Procedure of Derivation of Equation (8)
References
- Cabral, F.; Gil, P. On the Stability of Quasi-Satellite Orbits in the Elliptic Restricted Three-Body Problem. Master’s Thesis, Universidade Técnica de Lisboa, Lisbon, Portugal, 2011. [Google Scholar]
- Arnold, V. Mathematical Methods of Classical Mechanics; Springer: New York, NY, USA, 1978. [Google Scholar]
- Duboshin, G.N. Nebesnaja Mehanika. Osnovnye Zadachi i Metody. In Handbook for Celestial Mechanics; Nauka: Moscow, Russia, 1968. (In Russian) [Google Scholar]
- Szebehely, V. Theory of Orbits. In The Restricted Problem of Three Bodies; Yale University: New Haven, Connecticut; Academic Press: New York, NY, USA; London, UK, 1967. [Google Scholar]
- Abouelmagd, E.I.; Pal, A.K.; Guirao, J.L. Analysis of nominal halo orbits in the Sun–Earth system. Arch. Appl. Mech. 2021, 91, 4751–4763. [Google Scholar] [CrossRef]
- Ferrari, F.; Lavagna, M. Periodic motion around libration points in the Elliptic Restricted Three-Body Problem. Nonlinear Dyn. 2018, 93, 453–462. [Google Scholar] [CrossRef]
- Llibre, J.; Conxita, P. On the elliptic restricted three-body problem. Celest. Mech. Dyn. Astron. 1990, 48, 319–345. [Google Scholar] [CrossRef]
- Ershkov, S.; Aboeulmagd, E.; Rachinskaya, A. A novel type of ER3BP introduced for hierarchical configuration with variable angular momentum of secondary planet. Arch. Appl. Mech. 2021, 91, 4599–4607. [Google Scholar] [CrossRef]
- Ershkov, S.; Rachinskaya, A. Semi-analytical solution for the trapped orbits of satellite near the planet in ER3BP. Arch. Appl. Mech. 2021, 91, 1407–1422. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Note on the trapped motion in ER3BP at the vicinity of barycenter. Arch. Appl. Mech. 2021, 91, 997–1005. [Google Scholar] [CrossRef]
- Ashenberg, J. Satellite pitch dynamics in the elliptic problem of three bodies. J. Guid. Control Dyn. 1996, 1, 68–74. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Revisiting the dynamics of finite-sized satellite near the planet in ER3BP. Arch. Appl. Mech. 2022, 92, 2397–2407. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Capture in regime of a trapped motion with further inelastic collision for finite-sized asteroid in ER3BP. Symmetry 2022, 14, 1548. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Ansari, A.A.; Ullah, M.S.; García Guirao, J.L. A Planar Five-body Problem in a Framework of Heterogeneous and Mass Variation Effects. Astron. J. 2020, 160, 216. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Aboeulmagd, E. About influence of differential rotation in convection zone of gaseous or fluid giant planet (Uranus) onto the parameters of orbits of satellites. Eur. Phys. J. Plus 2021, 136, 387. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D. On the stability of Laplace resonance for Galilean moons (Io, Europa, Ganymede). An. Acad. Bras. Ciências Ann. Braz. Acad. Sci. 2021, 93, e20201016. [Google Scholar] [CrossRef]
- Ershkov, S.V. About tidal evolution of quasi-periodic orbits of satellites. Earth Moon Planets 2017, 1201, 15–30. [Google Scholar] [CrossRef]
- Ershkov, S.V.; Leshchenko, D. Solving procedure for 3D motions near libration points in CR3BP. Astrophys. Space Sci. 2019, 364, 207. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Prosviryakov, E.Y. A novel type of ER3BP introducing Milankovitch cycles or seasonal irradiation processes influencing onto orbit of planet. Arch. Appl. Mech. 2023, 93, 813–822. [Google Scholar] [CrossRef]
- Singh, J.; Umar, A. On motion around the collinear libration points in the elliptic R3BP with a bigger triaxial primary. New Astron. 2014, 29, 36–41. [Google Scholar] [CrossRef]
- Lukyanov, L.G.; Uralskaya, V.S. Sundman Stability of Natural Planet Satellites. Mon. Not. R. Astron. Soc. 2012, 421, 2316–2324. [Google Scholar] [CrossRef]
- Lukyanov, L.G.; Uralskaya, V.S. Hill stability of natural planet satellites in the restricted elliptic three-body problem. Sol. Syst. Res. 2015, 49, 263–270. [Google Scholar] [CrossRef]
- Ciccarelli, E.; Baresi, N. Covariance Analysis of Periodic and Quasi-Periodic Orbits around Phobos with Applications to the Martian Moons Exploration Mission. Astrodynamics 2023, in press. [Google Scholar] [CrossRef]
- Nekhoroshev, N.N. Exponential estimate on the stability time of near integrable Hamiltonian systems. Russ. Math. Surv. 1977, 32, 5–66. (In Russian) [Google Scholar] [CrossRef]
- Lidov, M.L.; Vashkov’yak, M.A. Theory of perturbations and analysis of the evolution of quasi-satellite orbits in the restricted three-body problem. Kosm. Issled. 1993, 31, 75–99. [Google Scholar]
- Peale, S.J. Orbital Resonances In The Solar System. Annu. Rev. Astron. Astro-Phys. 1976, 14, 215–246. [Google Scholar] [CrossRef]
- Wiegert, P.; Innanen, K.; Mikkola, S. The stability of quasi satellites in the outer solar system. Astron. J. 2000, 119, 1978–1984. [Google Scholar] [CrossRef]
- Lhotka, C. Nekhoroshev Stability in the Elliptic Restricted Three Body Problem. Ph.D. Thesis, Wien University, Wien, Austria, 2008. [Google Scholar] [CrossRef]
- Singh, J.; Leke, O. Stability of the photogravitational restricted three-body problem with variable masses. Astrophys. Space Sci. 2010, 326, 305–314. [Google Scholar] [CrossRef]
- Shankaran, S.; Sharma, J.P.; Ishwar, B. Equilibrium points in the generalized photogravitational non-planar restricted three body problem. Int. J. Eng. Sci. Technol. 2011, 3, 63–67. [Google Scholar] [CrossRef]
- Alshaery, A.A.; Abouelmagd, E.I. Analysis of the spatial quantized three-body problem. Results Phys. 2020, 17, 103067. [Google Scholar] [CrossRef]
- Chernikov, Y.A. The Photogravitational Restricted Three-Body Problem. Sov. Astron. 1970, 14, 176. [Google Scholar]
- Gomes, V.M.; de Cássia Domingos, R. Studying the lifetime of orbits around Moons in elliptic motion. Comp. Appl. Math. 2016, 35, 653–661. [Google Scholar] [CrossRef]
- Emelyanov, N.V. Influence of tides in viscoelastic bodies of planet and satellite on the satellite’s orbital motion. Mon. Not. R. Astron. Soc. 2018, 479, 1278–1286. [Google Scholar] [CrossRef]
- Lu, T.; Rein, H.; Tamayo, D.; Hadden, S.; Mardling, R.; Millholland, S.C.; Laughlin, G. Self-consistent Spin, Tidal, and Dynamical Equations of Motion in the REBOUNDx Framework. Astrophys. J. 2023, 948, 41. [Google Scholar] [CrossRef]
- Ferraz-Mello, S.; Rodríguez, A.; Hussmann, H. Tidal friction in close-in satellites and exoplanets: The Darwin theory re-visited. Celest. Mech. Dyn. Astron. 2008, 101, 171–201. [Google Scholar] [CrossRef]
- Sidorenko, V.V. The eccentric Kozai–Lidov effect as a resonance phenomenon. Celest. Mech. Dyn. Astron. 2018, 130, 4. [Google Scholar] [CrossRef]
- Efroimsky, M.; Lainey, V. Physics of bodily tides in terrestrial planets and the appropriate scales of dynamical evolution. J. Geophys. Res. 2007, 112, E12003. [Google Scholar] [CrossRef]
- Efroimsky, M.; Makarov, V.V. Tidal friction and tidal lagging. Applicability limitations of a popular formula for the tidal torque. Astrophys. J. 2013, 764, 10. [Google Scholar] [CrossRef]
- Peale, S.J.; Cassen, P. Contribution of Tidal Dissipation to Lunar Thermal History. Icarus 1978, 36, 245–269. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Prosviryakov, E. Revisiting Long-Time Dynamics of Earth’s Angular Rotation Depending on Quasiperiodic Solar Activity. Mathematics 2023, 11, 2117. [Google Scholar] [CrossRef]
- Mel’nikov, A.V.; Orlov, V.V.; Shevchenko, I.I. The Lyapunov exponents in the dynamics of triple star systems. Astron. Rep. 2013, 57, 429–439. [Google Scholar] [CrossRef]
- Mel’nikov, A.V.; Shevchenko, I.I. Unusual rotation modes of minor planetary satellites. Sol. Syst. Res. 2007, 41, 483–491. [Google Scholar] [CrossRef]
- Shalini, K.; Idrisi, M.J.; Singh, J.K.; Ullah, M.S. Stability analysis in the R3BP under the effect of heterogeneous spheroid. New Astron. 2023, 104, 102056. [Google Scholar] [CrossRef]
- Lidov, M.L. Evolution of the orbits of artificial satellites of planets as affected by gravitational perturbation from external bodies. AIAA J. 1963, 1, 1985–2002. [Google Scholar] [CrossRef]
- de Almeida Prado, A.F.B. Third-Body Perturbation in Orbits Around Natural Satellites. J. Guid. Control Dyn. 2003, 26, 33–40. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Prosviryakov, E.Y. Semi-Analytical Approach in BiER4BP for Exploring the Stable Positioning of the Elements of a Dyson Sphere. Symmetry 2023, 15, 326. [Google Scholar] [CrossRef]
- Ansari, A.A.; Prasad, S.N. Generalized elliptic restricted four-body problem with variable mass. Astron. Lett. 2020, 46, 275–288. [Google Scholar] [CrossRef]
- Ershkov, S.V. The Yarkovsky effect in generalized photogravitational 3-body problem. Planet. Space Sci. 2012, 73, 221–223. [Google Scholar] [CrossRef]
- Liu, C.; Gong, S. Hill stability of the satellite in the elliptic restricted four-body problem. Astrophys. Space Sci. 2018, 363, 162. [Google Scholar] [CrossRef]
- Meena, P.; Kishor, R. First order stability test of equilibrium points in the planar elliptic restricted four body problem with radiating primaries. Chaos Solitons Fractals 2021, 150, 111138. [Google Scholar] [CrossRef]
- Umar, A.; Jagadish, S. Semi-analytic solutions for the triangular points of double white dwarfs in the ER3BP: Impact of the body’s oblateness and the orbital eccentricity. Adv. Space Res. 2015, 55, 2584–2591. [Google Scholar] [CrossRef]
- Idrisi, M.J.; Ullah, M.S. A Study of Albedo Effects on Libration Points in the Elliptic Restricted Three-Body Problem. J. Astronaut. Sci. 2020, 67, 863–879. [Google Scholar] [CrossRef]
- Younis, S.H.; Ismail, M.N.; Mohamdien, G.F.; Ibrahiem, A.H. Effects of Radiation Pressure on the Elliptic Restricted Four-Body Problem. J. Appl. Math. 2021, 2021, 5842193. [Google Scholar] [CrossRef]
- Vincent, A.E.; Perdiou, A.E.; Perdios, E.A. Existence and Stability of Equilibrium Points in the R3BP With Triaxial-Radiating Primaries and an Oblate Massless Body Under the Effect of the Circumbinary Disc. Front. Astron. Space Sci. 2022, 9, 877459. [Google Scholar] [CrossRef]
- Cheng, H.; Gao, F. Periodic Orbits of the Restricted Three-Body Problem Based on the Mass Distribution of Saturn’s Regular Moons. Universe 2022, 8, 63. [Google Scholar] [CrossRef]
- Umar, A.; Hussain, A. A Motion in the ER3BP with an oblate primary and a triaxial stellar companion. Astrophys. Space Sci. 2016, 361, 344. [Google Scholar] [CrossRef]
- Singh, J.; Umar, A. Effect of Oblateness of an Artificial Satellite on the Orbits Around the Triangular Points of the Earth–Moon System in the Axisymmetric ER3BP. Differ. Equ. Dyn. Syst. 2017, 25, 11–27. [Google Scholar] [CrossRef]
- Emel’yanov, N.V.; Kanter, A.A. Orbits of new outer planetary satellites based on observations. Sol. Syst. Res. 2005, 39, 112–123. [Google Scholar] [CrossRef]
- Emel’yanov, N.V. Visible Encounters of the Outermost Satellites of Jupiter. Sol. Syst. Res. 2001, 35, 209–211. [Google Scholar] [CrossRef]
- Emelyanov, N.V.; Vashkov’yak, M.A. Evolution of orbits and encounters of distant planetary satellites. Study tools and examples. Sol. Syst. Res. 2012, 46, 423–435. [Google Scholar] [CrossRef]
- Emelyanov, N.V. Dynamics of Natural Satellites of Planets Based on Observations. Astron. Rep. 2018, 62, 977–985. [Google Scholar] [CrossRef]
- Emelyanov, N.V.; Drozdov, A.E. Determination of the orbits of 62 moons of asteroids based on astrometric observations. Mon. Not. R. Astron. Soc. 2020, 494, 2410–2416. [Google Scholar] [CrossRef]
- Emelyanov, N. The Dynamics of Natural Satellites of the Planets; Elsevier: Amsterdam, The Netherlands, 2021; 501p, ISBN 978-0-12-822704-6. [Google Scholar] [CrossRef]
- Emelyanov, N.V.; Arlot, J.E.; Varfolomeev, M.I.; Vashkov’yak, S.N.; Kanter, A.A.; Kudryavtsev, S.M.; Nasonova, L.P.; Ural’skaya, V.S. Construction of theories of motion, ephemerides, and databases for natural satellites of planets. Cosm. Res. 2006, 44, 128–136. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; García Guirao, J.L.; Pal, A.K. Periodic solution of the nonlinear Sitnikov restricted three-body problem. New Astron. 2020, 75, 101319. [Google Scholar] [CrossRef]
- Luk’yanov, L.G.; Shirmin, G.I. On the Hill stability in the general problem of three finite bodies. Astron. Lett. 2002, 28, 419–422. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ershkov, S.; Leshchenko, D.; Prosviryakov, E.Y.; Abouelmagd, E.I. Finite-Sized Orbiter’s Motion around the Natural Moons of Planets with Slow-Variable Eccentricity of Their Orbit in ER3BP. Mathematics 2023, 11, 3147. https://doi.org/10.3390/math11143147
Ershkov S, Leshchenko D, Prosviryakov EY, Abouelmagd EI. Finite-Sized Orbiter’s Motion around the Natural Moons of Planets with Slow-Variable Eccentricity of Their Orbit in ER3BP. Mathematics. 2023; 11(14):3147. https://doi.org/10.3390/math11143147
Chicago/Turabian StyleErshkov, Sergey, Dmytro Leshchenko, E. Yu. Prosviryakov, and Elbaz I. Abouelmagd. 2023. "Finite-Sized Orbiter’s Motion around the Natural Moons of Planets with Slow-Variable Eccentricity of Their Orbit in ER3BP" Mathematics 11, no. 14: 3147. https://doi.org/10.3390/math11143147
APA StyleErshkov, S., Leshchenko, D., Prosviryakov, E. Y., & Abouelmagd, E. I. (2023). Finite-Sized Orbiter’s Motion around the Natural Moons of Planets with Slow-Variable Eccentricity of Their Orbit in ER3BP. Mathematics, 11(14), 3147. https://doi.org/10.3390/math11143147