1. Introduction
Singular systems have been of great interest to the field of control theory because they can more accurately represent practical systems with complex dynamics such as bio-economic systems [
1], oil catalytic cracking processes [
2], electrical circuit systems [
3], etc. However, the stability analysis of singular systems is more challenging than those of normal systems. The presence of impulsive behavior is a critical issue that must be addressed before any stability analysis can be performed. To ensure the stability of singular systems, it is necessary to eliminate impulsive behavior. In addition, according to [
4], one can find that one approach to achieve this is through matrix decompositions or the use of a controller. In [
5,
6,
7], the researchers investigated various control issues related to linear singular systems, including delay-dependent control, output feedback control and optimal control, respectively. Overall, the study of singular systems and their control is an active area of research in control theory, with many promising results and applications in various practical systems.
Many practical systems exhibit nonlinear characteristics, which makes it challenging to stabilize them using linear control theories. As a result, researchers have extensively investigated control synthesis for nonlinear singular systems. T-S fuzzy models [
8,
9,
10,
11,
12,
13] are an effective approach for describing nonlinear systems. By constructing several linear subsystems using fuzzy sets and IF-THEN rules, the final output of the T-S Fuzzy Singular System (T-SFSS) [
14,
15,
16,
17,
18,
19] can be obtained through membership functions. To stabilize the T-SFSS with linear control theories, a fuzzy controller with the same membership function as the model can be designed based on the PDC concept [
13,
20]. However, uncertainties are present in practical systems due to modeling errors or component aging. To solve these effects, robust control methods have developed [
17,
18,
19]. Type-2 T-S fuzzy modeling approaches [
21,
22] have also been constructed to solve the uncertainty problem in membership functions. Moreover, external disturbances caused by external factors can lead to poor control performance, which can make the system unstable. To mitigate the impact of external disturbances, passive theory is used. Passive theory [
23,
24] involves designing a controller that attenuates the influence of external disturbances.
In recent years, state feedback control methods have been commonly used for analyzing the stability of T-SFSSs. However, in practical systems, it may not be possible to measure the entire state information, which can make it difficult to design a controller. To overcome this challenge, observer theories were investigated in [
25,
26] to estimate the unmeasurable states. Additionally, research [
27,
28] has shown that the impulse behaviors in T-SFSSs can be effectively eliminated using derivative state feedback. To address this, the PD control method was proposed in [
27,
28], which uses the derivative feedback of the PD fuzzy controller to ensure regularity and non-impulsiveness of T-SFSSs. Additionally, the procedure for guaranteeing the regularity and non-impulsiveness using PD fuzzy controllers with derivative feedback is simpler than that of the pure state feedback fuzzy controller. To acquire complete state information of PD fuzzy controllers, an Observer-Based PD (OBPD) fuzzy controller was developed for T-SFSSs in [
29,
30,
31]. Unfortunately, passive control and robust control were not addressed in these studies, which are essential for ensuring the stability of T-SFSSs. Therefore, passive control and robust control are important issues that will be discussed in this paper for determining the stability criterion of T-SFSSs. In addition to stabilization, there have been efforts to assign certain performance criteria when designing controllers. One approach to this is GCC [
32,
33], which aims to stabilize the system while ensuring an adequate level of performance expressed by a quadratic cost function.
Referring to the above motivations, an OBPD fuzzy control approach is discussed for dealing with uncertain T-SFSSs subject to MPRs. The proposed control scheme employs the PDC concept along with the PD control method. The aim was to ensure the stability of the system while satisfying the GCC constraint under passive constraints. Based on the Lyapunov theory, the sufficient conditions are obtained. These conditions are then transformed into an LMI form using various techniques such as Schur complement, free-weighting matrix and SVD [
30]. The LMI conditions can be efficiently solved using convex optimization algorithms [
34]. Finally, the effectiveness of the proposed control method was demonstrated by applying it to a nonlinear bio-economic system. The main contributions of this paper can be summarized as follows: (1) Although the PD control method has been applied for the nonlinear singular system in some papers, only a few researchers focused on the observer-based fuzzy control method for T-SFSSs. Based on the T-SFSS, this paper not only developed the fuzzy observer to estimate the unmeasured states, but also proposed a PD fuzzy controller with estimated states to eliminate impulsive behaviors of nonlinear singular systems. Via the OBPD fuzzy controller design method, the MPRs can be combined into the design method to achieve better performances for the nonlinear singular system. (2) For the practical applications, it is expected that the control force can be smaller to achieve the purpose of cost-effectiveness. In this paper, the GCC constraint and passive performance constraint were simultaneously combined into the OBPD fuzzy controller design method. However, the stability analysis will become more difficult and challenging when MPRs are combined. The problem also was efficiently solved by applying mathematical techniques such as SVD and free-weighting matrices. Via the OBPD fuzzy controller design method, the stability of nonlinear singular systems can be achieved with a more cost-effective control effort even under the effect of uncertainty and external disturbances. To the best of our knowledge, the OBPD fuzzy controller design method for uncertain T-SFSSs subject to MPRs constraints has not been developed.
The subsequent sections of this paper are organized as follows. The uncertain T-SFSS with external disturbances and OBPD fuzzy controller are described in
Section 2. In
Section 3, the stability analysis of the considered system is discussed. In
Section 4, an example is used to illustrate the effectiveness of the proposed design method. The conclusion is presented in
Section 5.
Notation and Nomenclature
represents the shorthand of . represents the -dimensional vector. and represent the shorthand of and , respectively. denotes the rank of . denotes the symmetric term in the matrix.
2. System Descriptions and OBPD Control Method
In this section, the T-S fuzzy model is utilized to express the uncertain nonlinear singular system with external disturbance as follows:
Plant Rule i:
If
is
and
is
, then
where
are the premise variables,
is the fuzzy set,
is the number of premise variables,
and
is the number of rules,
is the state vector,
is the control input vector,
is the external disturbance vector,
is the measured output vector and
is the output vector.
,
,
,
,
and
are constant matrices.
is a constant matrix with
.
,
and
are the unknown matrices describing uncertainties, which are expressed as
,
and
in the following context and are given as
where
,
,
and
denote the known matrices and
denotes the unknown time-varying function satisfying
.
Hence, the following overall T-S fuzzy model is designed.
where
,
,
and
is the grade of the membership of
in
. For simplification,
is defined in the following context.
To overcome the problem with unmeasurable states, the following PD fuzzy observer is constructed.
Observer Rule i:
If
is
and… and
is
, then
where
and
are the estimated state vector and estimated output vector, respectively. The matrices
and
are the observer gains. Then, the following overall fuzzy observer can be described.
Based on the PDC concept and PD control method, the OBPD fuzzy controller can be established as follows:
Controller Rule i:
If
is
and… and
is
, then
where
and
are controller gains. Then, the following overall fuzzy controller can be expressed.
Assumption 1 is to ensure the observability and controllability of system (3). Additionally, Assumption 2 assumes the output matrix C can be described by SVD.
Assumption 1. If the following equalities are held, system (3) is completely controllable and completely observable.
where , is the open right-half of the complex plane.
Assumption 2. ([
30]
). Assume that the output matrix has full row rank, the SVD of matrix is expressed aswhere .
is a diagonal matrix with positive diagonal elements. and are orthogonal matrices. Remark 1. To develop the OBPD fuzzy controller design method in this paper, the SVD technology was applied to solve the problem in the stability analysis. However, the output matrix of the T-S fuzzy model (1)–(3) and fuzzy observer (4)–(5) is required to be set as a constant matrix for the SVD technology, that is, .
Because of this reason, the measured output is considered as the linear case of for the T-S fuzzy model (3c) and for the fuzzy observer (5b). Nevertheless, the measured output of the nonlinear system is usually constructed as the linear output in many existing papers [17,18]. Although the setting of constant matrix will limit the design flexibility fuzzy model and fuzzy controller, the OBPD fuzzy controller design method in this paper is still sufficiently applicable for the control of uncertain nonlinear singular systems. By defining the estimation error function
and applying Equations (3a) and (5a), one can derive the following relationship equation.
From Equations (3a) and (8), the augmented system can be obtained as follows:
By arranging Equation (9), the equation can be further obtained as follows:
where
,
,
,
,
,
,
,
,
,
and
.
According to Assumption 1,
is turned invertible by gains
and
. The following equation can thus be obtained from Equation (10).
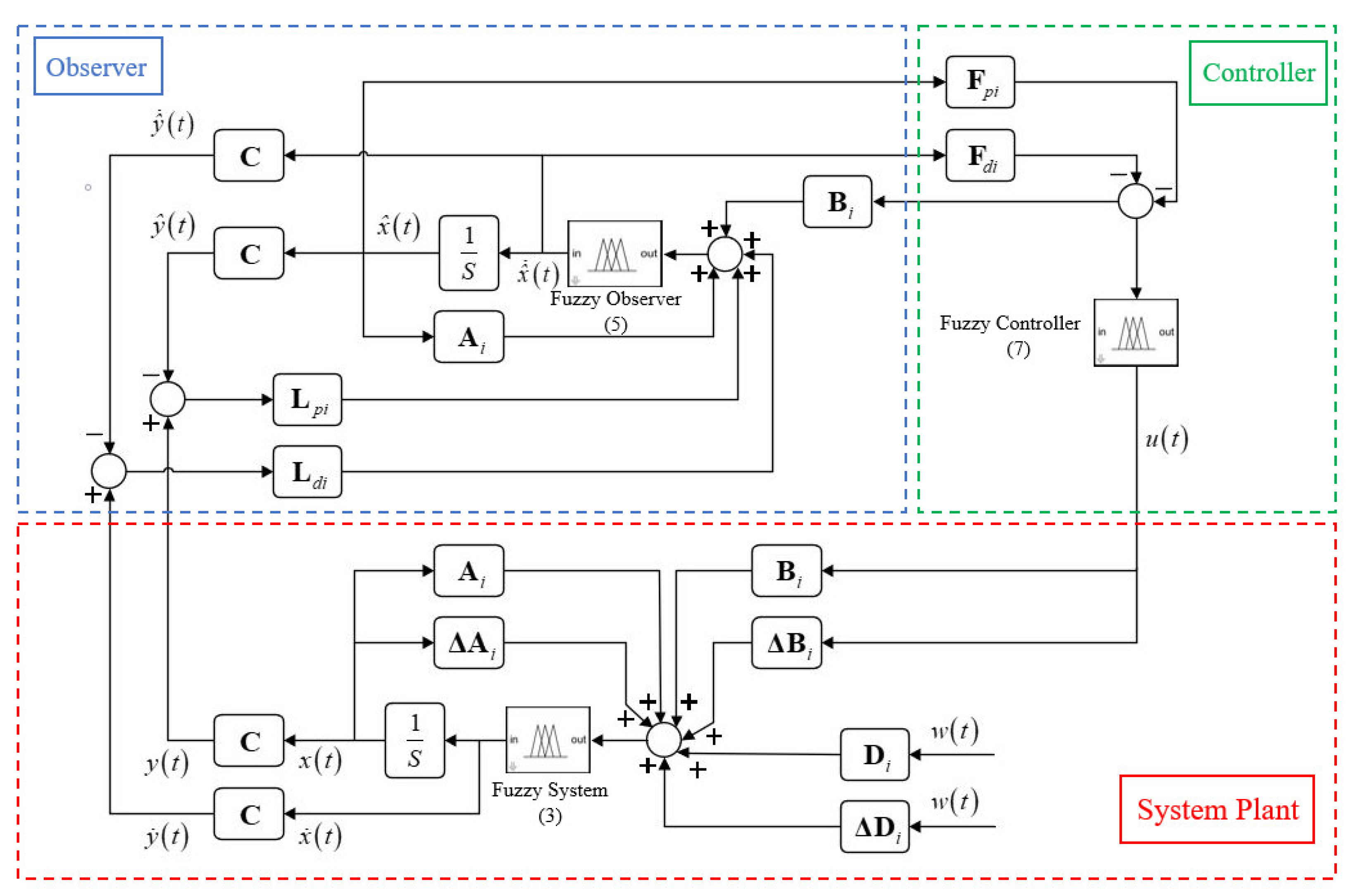
The following figure is provided to illustrate the relationship between the module of all components in a clear and comprehensive manner. Firstly, the T-SFSS (3) in the System Plant part is established for the representation of an uncertain nonlinear singular system under the effect of external disturbances. Then, the fuzzy observer (4) is designed with the same premise part of the fuzzy model and the overall fuzzy observer (5) in the Observer part is developed to estimate the unmeasured states of the T-SSFSS (3). Thus, the estimated states
and derivative of states
obtained by the fuzzy observer (5) can be applied as the feedback signal for the fuzzy controller (7), which is presented in the Controller Part. Finally, the control input
provided by the fuzzy controller (7) is designed by the OBPD fuzzy controller design method in the next section. Additionally, the control input can be applied to guarantee the stability and MPRs of the nonlinear singular system under the effect of uncertainty and external disturbance (
Figure 1).
Some useful definitions and lemmas are provided next before the stability conditions is derived.
Definition 1. ([
24]
). If the following inequality is held given , and , then the system is passive with the external disturbance and output for all terminal time .
The performance cost function associated with system (3) is defined as follows:where and are positive definite symmetric matrices with approximate dimensions. The following definition of GCC for system (3) is defined.
Definition 2. ([
32]
). If there is a controller (7) and a positive scalar such that system (3a) is asymptotically stable, and the value of the cost function (13) satisfies , then is considered to be a guaranteed cost.
Lemma 1. ([
30]
). Given real appropriate dimension matrices , and with and a scalar , one can find the result as follows: 4. Numerical Examples
The effectiveness of the proposed design method is illustrated in this section using a nonlinear bio-economic system that was studied in [
1,
31]. Firstly, the nonlinear bio-economic system is presented as follows.
where
and
represent the population density of juvenile species and adult species, respectively.
represents the harvest effort on the immature population and
represents the policy for adjusting the tax.
represents the price constant per individual population,
represents the cost coefficient and
represents the economic interest of harvesting. The more detailed meaning of the parameters of Equation (41) can be found in [
1].
To protect resources and promote economic development, the government implements the adjustment on tax to increase or decrease the cost for harvesting so that the bio-economy system can achieve sustainable development. Referring to [
1], the operating points were chosen as
and
. The other system coefficients were chosen as
,
,
,
,
,
and
. Additionally, the nonlinear model (41) can be rewritten as the following form by the setting
,
and
:
In addition, we added uncertainty terms to represent modeling errors for simulating the real operating conditions. With these considerations, the corresponding T-S fuzzy model can be expressed as follows:
where
,
,
,
,
,
,
,
,
,
,
,
,
,
and
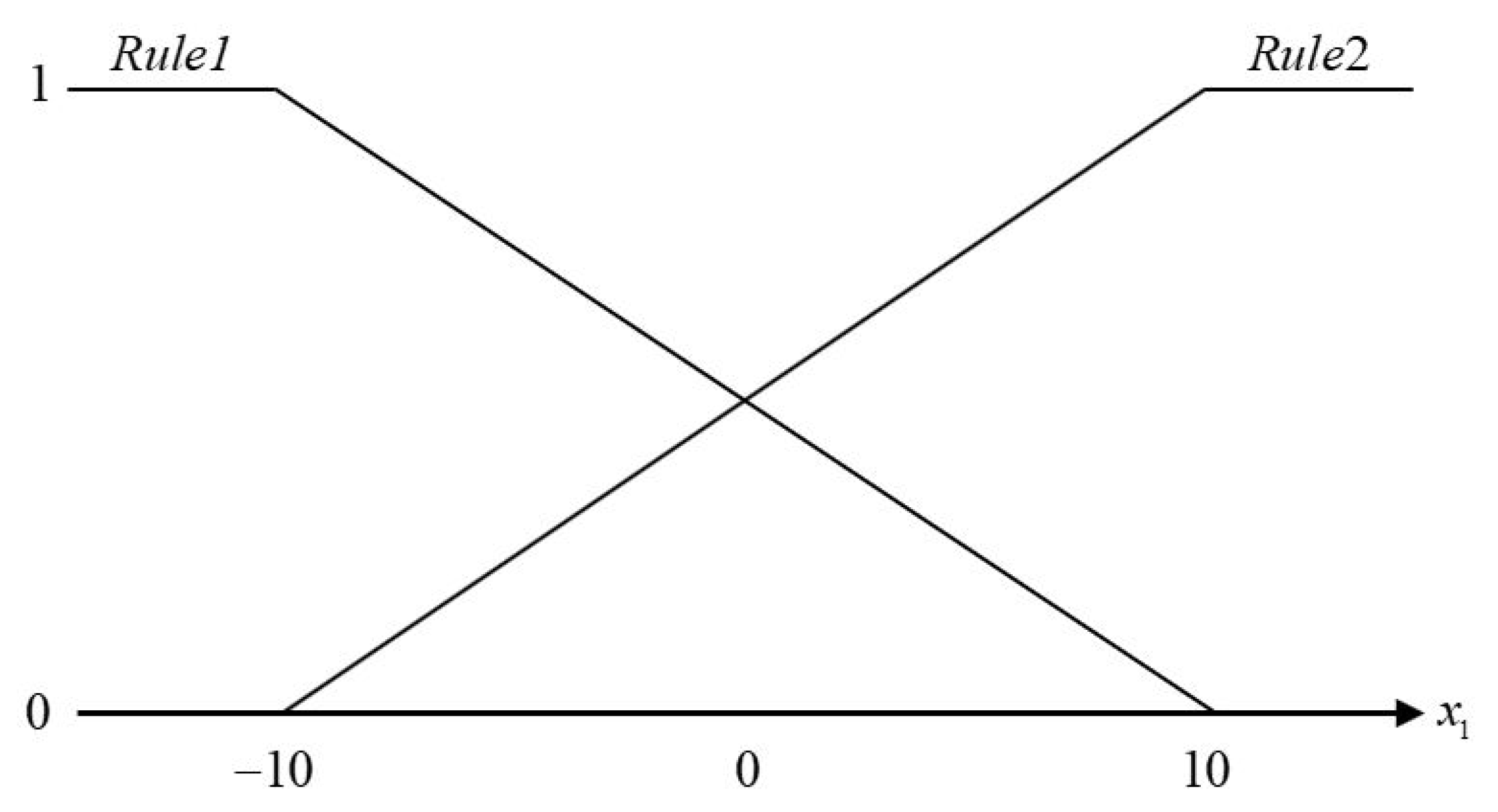
. The membership functions are
and
, which are presented in
Figure 2. Moreover, the uncertain parameters are assumed to be as follows from Equation (2):
, , , , , , and .
Based on Assumption 1, the following matrices
,
and
are obtained by compositing
:
By setting a scalar
and the matrices
,
and
, the following gains and positive definite matrix can be directly calculated using the convex optimization algorithm:
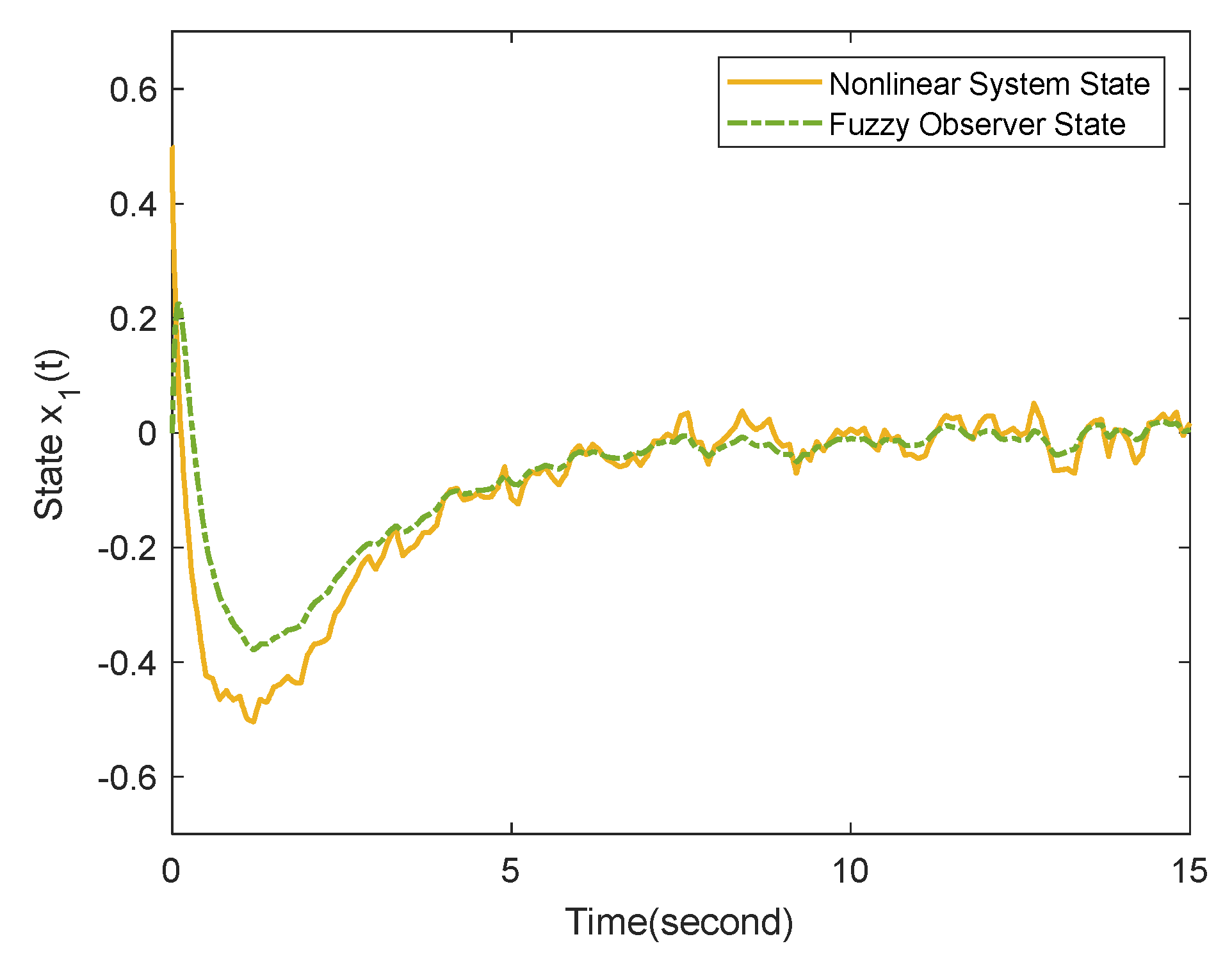
Via the gains presented in Equation (44), the proposed OBPD controller (7) can be designed with the observed states of a fuzzy observer (5) to control the nonlinear bio-economic system. Thus, the state responses of system (42) are depicted in
Figure 3,
Figure 4 and
Figure 5 with the initial conditions
and
, respectively.
Based on the simulation results in
Figure 3,
Figure 4 and
Figure 5, the passive performance can also be verified as follows. Firstly, the following inequality can be obtained from the passive performance constraint (12) in Definition 1 with the setting of
,
and
in this simulation:
From the inequality (45), one can know that if the value obtained with output
and external disturbance
is larger than the threshold value 0.8, the passive performance can be guaranteed for the nonlinear bio-economic system. According to the setting of
,
,
,
and
for the T-S fuzzy model (43), the value based on the term of the right-hand side of Equation (43) was obtained via the simulation results.
Obviously, comparing the value of Equation (46) with the threshold value 0.8 in inequality (45), one can find that the passive performance constraint in Definition 1 is satisfied. Therefore, the effect of external disturbance can be effectively attenuated. From the responses in
Figure 3,
Figure 4 and
Figure 5, it becomes evident that the stability of nonlinear bio-economic system was achieved by applying the proposed OBPD fuzzy controller (7) even under the effects of external disturbance and uncertainty. Additionally, it was also seen that the states of the nonlinear system (41) were successfully estimated by the designed fuzzy observer.
Referring to [
1,
31], the convergence of system states implies that all the states can be controlled to the positive equilibriums for
,
and
. This also means the juvenile species, the adult species and the harvest effort on the immature population must reach a balance so that the population of the species can be protected from endangerment. Moreover, the proposed OBPD fuzzy controller design method can be provided as a good choice for the government policy to adjust taxes and regulate the cost of harvesting.
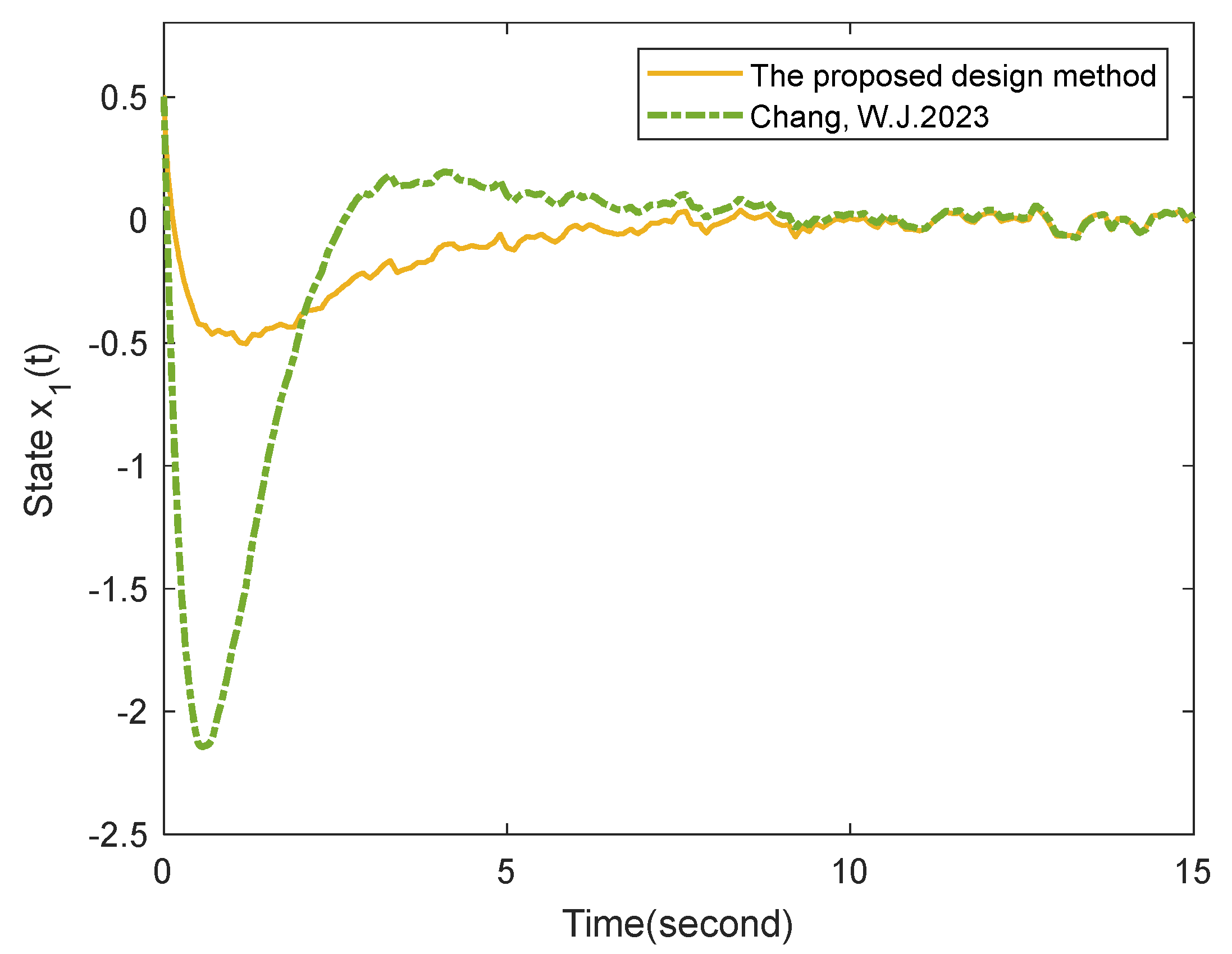
To demonstrate the effectiveness of the proposed OBPD fuzzy control method in the control of nonlinear singular systems, the simulation results comparing the proposed method with the design method in [
31] are presented below. Applying the fuzzy control method in [
31], the following gains of fuzzy controller and fuzzy observer can be obtained based on the T-SFSS (43):
Via selecting the same initial condition
and
, the state responses of the nonlinear system (41) are presented in
Figure 6,
Figure 7,
Figure 8 and
Figure 9 applying the OBPD fuzzy controller (7) and the fuzzy observer (5).
It is worth noting that, although the robust OBPD fuzzy controller subject to passive constraint has also been developed in [
31], the GCC performance requirement was considered in this research. However, the stability analysis will become more difficult and challenging if the multi-performance constraints are simultaneously considered in the fuzzy controller design method. Through application of some efficient mathematical techniques, this problem was efficiently solved by the proposed design method. Therefore, the designed fuzzy controller (15) with the gains (44) can achieve stability under the effect of uncertainty and external disturbance by using the smaller control force. From the responses in
Figure 9, it is obvious that the control input of the proposed OBPD fuzzy controller design method was smaller than the design method in [
31]. On top of that, one can find that the small overshoot of state responses presented in
Figure 6,
Figure 7 and
Figure 8 were obtained by the proposed OBPD fuzzy controller. Additionally, the settling time of all state responses obtained with both design methods was almost the same. Therefore, it can be concluded that the proposed OBPD fuzzy controller design method can obtain better state responses with a more cost-effective control force even when affected by uncertainty and external disturbances.
Based on the simulation results in
Figure 6,
Figure 7,
Figure 8 and
Figure 9, the variance values and the overshoot of all states are presented to compare the two design methods. Note that the variance value of external disturbance was selected as 0.5 in this simulation. Comparing the variance values in
Table 1 with the variance values of external disturbance, it can be verified that the effect of disturbance was successfully attenuated by two design methods. Additionally, the proposed OBPD fuzzy controller can converge close to zero more accurately with disturbance for states
and
. Additionally, the value of max overshoot is also presented for each state in
Table 1. From the measurements in
Table 1 and
Figure 6,
Figure 7,
Figure 8 and
Figure 9, one can see that the proposed OBPD fuzzy controller design method can achieve a smaller overshoot and similar settling time. Additionally, the lower fuzzy control force presented in
Figure 9 can be provided by the proposed design method. It is worth noting that the variance value of state
was not satisfied by applying the design method of [
31] because of the excessive overshoot. Thus, the effectiveness of the proposed design method can also be verified from
Table 1 by comparing with the design method in [
31].
For the bio-economic system, the results in
Figure 6 and
Figure 7 indicate that the population density of the juvenile species and adult species can smoothly achieve an equilibrium. Additionally, the harvest effort on the immature population can be determined more accurately. The larger overshoot of state responses in
Figure 6 and
Figure 7 indicates that the population density of the species is rapidly changed, which may not be in accordance with a biological system. Based on the results of
Figure 9, the tax is imposed with the smaller and smoother value such that the more economical purpose can be achieved. Therefore, the proposed OBPD fuzzy controller design method not only achieved a better control performance for the nonlinear singular system with uncertainty and external disturbance, but it also can provide a more cost-effective fuzzy control method for practical applications.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}