1. Introduction
Compared with the traditional rigid structure, the flexible structure has the characteristics of low cost, high flexibility, and high energy efficiency. Therefore, flexible systems are widely used [
1,
2,
3,
4]. In practical engineering, harmful transverse vibrations can be generated due to the influence of external disturbances and the physical structure characteristics of the system itself, which may reduce the productivity of the system. To solve those unwanted vibrations, the first step is to establish an accurate flexible system model. The dynamic model of flexible system is essentially a distributed parameter system with infinite dimensional state space. If we use the traditional finite-dimensional approximation method, it has some advantages in system structure analysis and controller design, but it will cause the loss of system signal and seriously affect the performance of the controller. Using partial differential equations (PDEs) to model distributed parameter systems can avoid such disadvantages. Therefore, we use partial differential equations to build the system model. This modeling approach has been widely used in practical systems, such as submarine resource transmission operation [
5], wind power plant [
6], and satellite attitude adjustment [
7], and so on.
Up to now, the boundary control problem has become the most common problem in flexible systems modeled by PDEs [
8,
9,
10,
11]. In the boundary control scheme, sensors and actuators are placed at the boundary of the system, which not only does not affect the modeling and analysis of other locations of the flexible system, but is also easy to implement [
12,
13]. In fact, there have been many research results in the field of boundary control [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24]. Boundary controllers have been used to suppress vibrations of systems modeled as flexible strings [
14,
15]. The Lyapunov direct method was used to design boundary control schemes to achieve the reduction in additional vibrations of the system [
16,
17]. In [
18,
19,
20,
21,
22], a boundary feedback strategy was proposed to achieve the control of the angle and the reduction in the system’s vibration objective by designing the controller and the observer simultaneously. In [
23], the solution of the closed-loop system is constructed and the existence of the solution is proved by constructing a suitable Lyapunov function and proving the exponential stability of the system, using the Galerkin approximation scheme. It is worth noting that the two ends of the above physical system are the free end and the fixed end, respectively. However, for an axially moving flexible system with fixed ends, we cannot simply use the control scheme mentioned in the above references if we want to achieve better control results.
A belt, as a typical axially moving flexible structural system, whose transverse vibration always produces huge noise, will pollute the environment. In order to improve the transmission and control efficiency of the belt system, scholars have put forward many useful control strategies. In [
24], a boundary control scheme for an auxiliary system was proposed to deal with the problem using actuator saturation constraint. In [
25], by a combination of adaptive technology and the Lyapunov analysis method, authors put forward adaptive boundary control to suppress belt transverse vibration and design adaptive law for the influence of unknown system parameters to deal with the situation that some variables of the belt system are unknown. In [
26], the adaptive method is used to deal with the uncertainty of parameters and interfere with observers to eliminate the influence of unknown boundary disturbances. In [
27], the boundary controller is designed by the Lyapunov function to suppress vibration, while the axially moving belt system is divided into a controllable domain and an uncontrollable domain. In the references mentioned above, we find that there is little information about the boundary vibration constraint of an axially moving belt system. For the belt system, the boundary vibration constraint problem is worth paying attention to and solving. In general, the speed of the belt operation varies according to the different production requirements. Due to the limited tension of the belt system material and the physical characteristics of the close connection between the rotating shaft and the belt, the transverse vibration of the belt must not exceed the safe range. Once the transverse vibration exceeds the system boundary vibration constraint, coupled with the belt variable speed motion, it will reduce the efficiency of the belt and damage the belt system in severe cases. Taking the system boundary vibration constraint into account in the control scheme design will make the controller design more challenging.
In addition, in the above references, the authors assume that the state information of the system can be obtained by sensors or corresponding algorithms, and designed a state control scheme based on these signals. However, due to the existence of noise in the actual system, the measurement of some system signals will be inaccurate. To avoid this problem, we introduce a high-gain observer to estimate these system signals. The introduction of the observer increases the challenge of the controller design scheme [
28,
29,
30].
In this paper, we consider the variable speed horizontal belt conveying system of surface mount technology equipment (SMTs) with boundary displacement restrain as model analysis. A form of the Lyapunov function, combining both the logarithmic function and the integral Lyapunov function, is employed for the control design and stability analysis of the axially moving belt system. According to the availability of the second derivative of the system signal, a state feedback controller and an output feedback controller are designed, respectively, and a high-gain observer is used in the design of the output feedback control scheme.
Compared with the existing results of belt systems, the main contributions of this paper can be summarized by the following two points:
- (1)
The problem of the boundary vibration constraints is considered. To the best of our knowledge, there are few research results on the boundary vibration constraint problem of belt systems. However, as far as the controllable area of the whole belt system is concerned, the vibration at the boundary is more intense. If the vibration at the boundary can satisfy the physical constraint of the belt system, then the whole belt system will not produce a strong transverse vibration.
- (2)
In practice, since the influence of many factors can make the measurement of the system boundary signal inaccurate, the control effect will be inevitably affected if the state feedback control scheme is used. For this reason, we designed a high-gain observer to observe the boundary signals and designed an output feedback control scheme based on the observed signals.
The remaining structure of this paper is as follows. In
Section 2, the dynamic equations of the system and the controller objectives we need to achieve are given. In
Section 3, the design method of the state and output feedback controller and the stability analysis of the closed-loop system are given. In
Section 4, the simulation results show the effectiveness of the designed controller, and the conclusion is provided in
Section 5.
2. System Description and Control Objectives
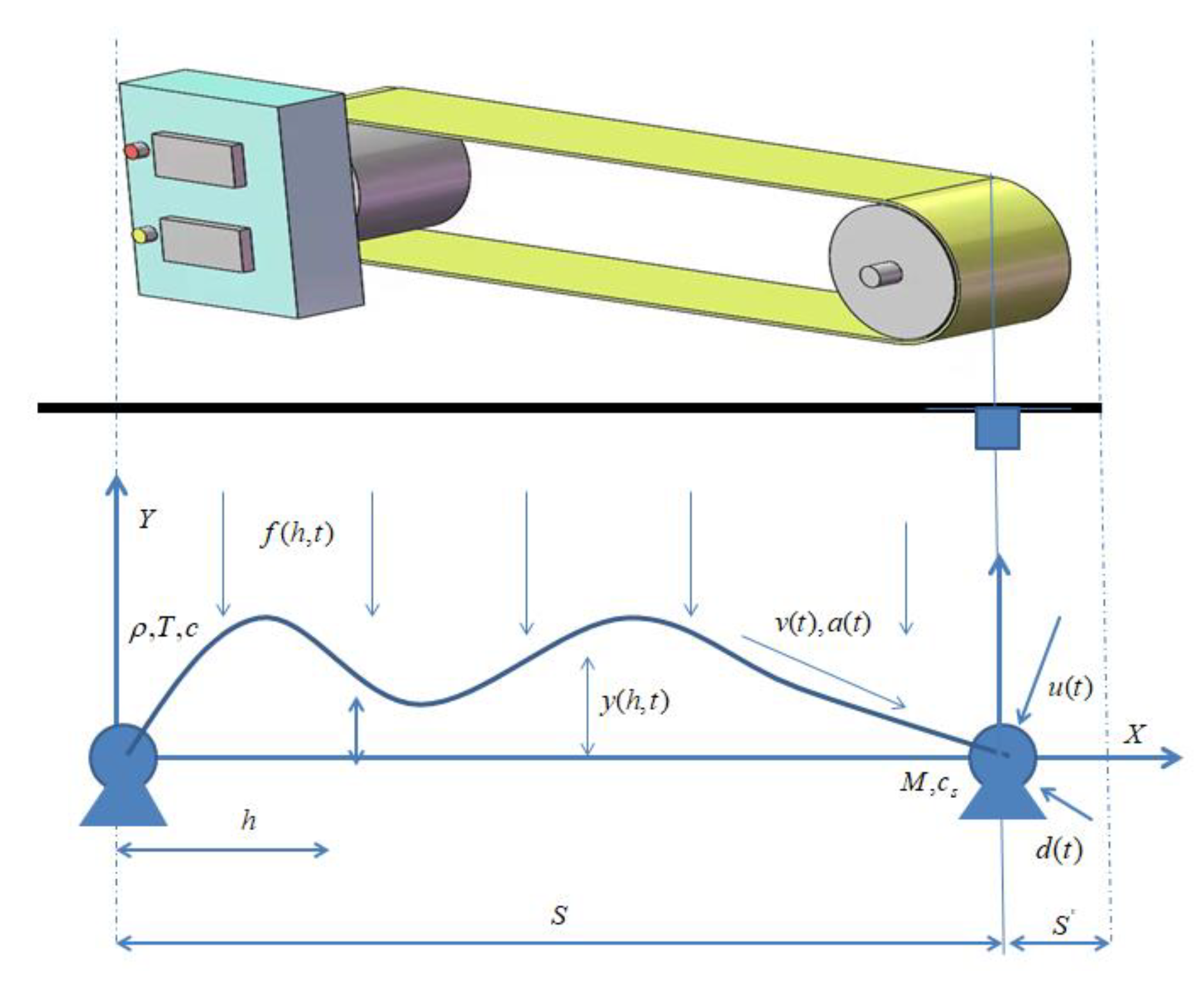
As shown in
Figure 1, this paper studies a class of horizontal belt transmission systems with the boundary vibration constraint. The parameters of the system and the meanings of the relevant variables are described in detail in
Table 1. The following abbreviations are defined for later interpretation:
The belt system with horizontal transmission and controllable acceleration has a governing equation, which is given as [
25]:
for
. The dynamics at the boundary are given by the following equations:
The control objectives of this paper are to design the boundary controller under the state feedback and the output feedback, respectively, which can reach the following aims: (1) suppress the transverse vibration of the belt system and make it as small as possible; (2) keep the boundary vibration so that it will not exceed the boundary of restraint, i.e., to assure achieves , where is a constant value that the boundary vibration cannot exceed due to the limitation of the belt system.
3. Boundary Control Design
In this paper, we take two system conditions into consideration: (i) the state feedback boundary control and (ii) the output feedback boundary control. In case (i), all system signals are directly obtained by sensors and the backward difference algorithms. As for case (ii), is unmeasurable and is estimated by the high-gain observer.
For the follow-up analysis, the following lemmas and assumptions are introduced first.
Lemma 1 ([
25]
). Let , , with , then there are the following two inequalities hold Lemma 2 ([
31]
). Let be a function with the domain of two independent variables, which satisfies the initial position is zero at any time, then there will be an inequality of the following form Lemma 3 ([
32]
). When the kinetic energy and potential energy of system are bounded , the states , , , and are deduced to be bounded , .
Assumption 1. Assume that,,, andmentioned in (1) and (2) are bounded. That is to say, there are some constants,,, and, such that,,, and, for.
This is an appropriate assumption. Because the power provided by the power roller cannot be large, wirelessly, , , and are generated by their boundaries. The boundary interference has limited energy, so it is also bounded.
3.1. State Feedback Boundary Controller Design
In this part, to keep the boundary displacement remaining in the constrained space, in the case where all the parameters in the considered system are known, the state feedback boundary control scheme is proposed. The Lyapunov stability theory will be applied to prove the system’s stability, and the design process of the controller is described as follows.
The following Lyapunov function is chosen
where
with
and
being design parameters,
being the boundary vibration constrained bound.
and
are the auxiliary signals, which are defined as
where
is constant.
Applying Lemma 1 to
yields
where
Then, we can obtain the following results by appropriately selecting the values of
and
Therefore, we find that is bounded and greater than zero.
Using (5), and taking the derivative of
along with time, we have
Substituting (1) into
, we have
Similarly, based on (1), we can obtain
as
Using the boundary condition (2), we can see that
In order to achieve control objectives, the state feedback controller is designed as
where
and
are constants.
Combining with (19) and (18), we can obtain
From (15)–(17) and (20), we have
where
,
and
are constants.
Appropriate parameters are chosen to make the following inequality hold
then, we deduce that
where
.
Combining with (14) and (23), we further obtain
where
.
Theorem 1. For a class of belt systems with horizontal transmission and variable speed represented by (1) and (2), under Assumption 1, if the initial state of the system is bounded and the inequality shown in (22) is satisfied by selecting appropriate parameters, then the designed controller (19) can guarantee that: (1) The vibration displacement of the system is stable near the equilibrium position; (2) All signals of the closed-loop system are bounded; and (3) The boundary vibration generated during the whole system operation will not exceed its constraint condition.
Proof of Theorem 1. The boundedness of is shown in the following.
After integrating (24), we can obtain
Then, for the boundedness of the initial state, we can see that
is bounded in any future time. Combining (4), (6) and (14), we have
According to (26) and (25), we can conclude that
for
.
Furthermore, for
, a direct computation yields
Based on (26), we find that
and
are bounded. According to the definition of
, the states of the system
and
are also bounded
. Subsequently, the boundedness of the kinetic energy and the potential energy are ensured [
25]. According to Lemma 3, we conclude that the signals
and
are bounded. According to (1), the state
is also bounded. Hence, all signals of the closed-loop system are bounded.
Next, it is an indication that satisfies its constrained condition, i.e., ,.
It is assumed that the vibration at the right boundary of the system has . Because of the definition of , we can obtain , as . However, the function of is bounded, which contradicts with . So given that , we have , .
Because of the similarity of systems, interested readers can refer to [
24] about the properties of system solutions. So, it is omitted here.
This completes the proof of Theorem 1. □
3.2. Output Feedback Boundary Controller Design
Different from the previous part, this section will explore the design of the boundary controller and the analysis of system stability when the second derivative of the system boundary signal cannot be directly used by the control scheme. The first derivative of the boundary signal of the system can be measured by sensors, so and can be used. For the existence of noise in actual systems, is unmeasured, which will affect the control performance. Therefore, a high-gain observer is used to estimate , and a controller is designed by using the observed value.
Before designing, the following important lemma is given.
Lemma 4 ([
33]
). Suppose that a system output and its first -order derivatives are bounded as with positive constants ,
, for the systemwhere is a small positive constant, and the parameters , for , are chosen such that the polynomial is Hurwitz. Then, we conclude the following propertywhere with denoting the -order derivative of .
In addition, there exist positive constants and such that , , for .
It is obvious from Lemma 4 that
converges to
, in which
represents the
-order derivative of
. When
satisfies the above lemma,
will tend to zero due to the existence of high gain
. So,
is chosen as an observer to estimate the
-order derivative of the unmeasurable signal. In this paper, we define
,
and the estimated value of
is
where
The following Lyapunov function is chosen
where
with
and
being design parameters.
and
are the auxiliary signals, which are defined as
where
is constant.
Applying the same method as, selecting the appropriate parameters
and
, it is easy to verify that
Then, from (33), we have
where
and
are constants. Therefore, we find that
is bounded and greater than zero.
Using (33) and taking the derivative of
along with time, we find
Using the governing Equation (1), it yields
Similarly, based on (1) and substituting (1) into
, we have
Using the boundary condition (2), we conclude that
In order to achieve control objectives, the output feedback controller is designed as
where
and
are constants.
By Lemma 1 and (44), (43) can be written as
where
and
are constants.
From (40)–(42) and (45), we have
where
,
, and
are constants.
Appropriate parameters are chosen to make the following inequality hold
then, we can deduce that
where
and
.
Combining (39) and (48), then the following gives
where
.
Theorem 2. For a class of belt systems with horizontal transmission, variable speed, and some unknown system states represented by (1) and (2), under Assumption 1, if the initial state of the system is bounded and the inequality shown in (47) is satisfied by selecting appropriate parameters, then the output feedback controller (44) is designed such that: (1) The transverse vibration in the whole controllable domain can be as small as possible by carefully adjusting the relevant parameters; (2) All signals in the closed-loop system are bounded; (3) The boundary vibration generated during the whole system operation will not exceed its constraint condition.
Proof of Theorem 2. The proof is similar to that in the state feedback part and considering the limited space, the proof process is omitted here. □
4. Simulation Example
In this part, the effectiveness of the designed controllers (19) and (44) is demonstrated by the following simulation examples. Use the finite difference (FD) method to approximate the solutions of the systems described in (1) and (2).
provided by the power roller is given in [
25], with
g and set the interval of time to
s. The initial values are given as
,
. The specific values of the system parameters and control design parameters we have selected are shown in
Table 2 and
Table 3.
Disturbances
and
suffered by the system are as follows
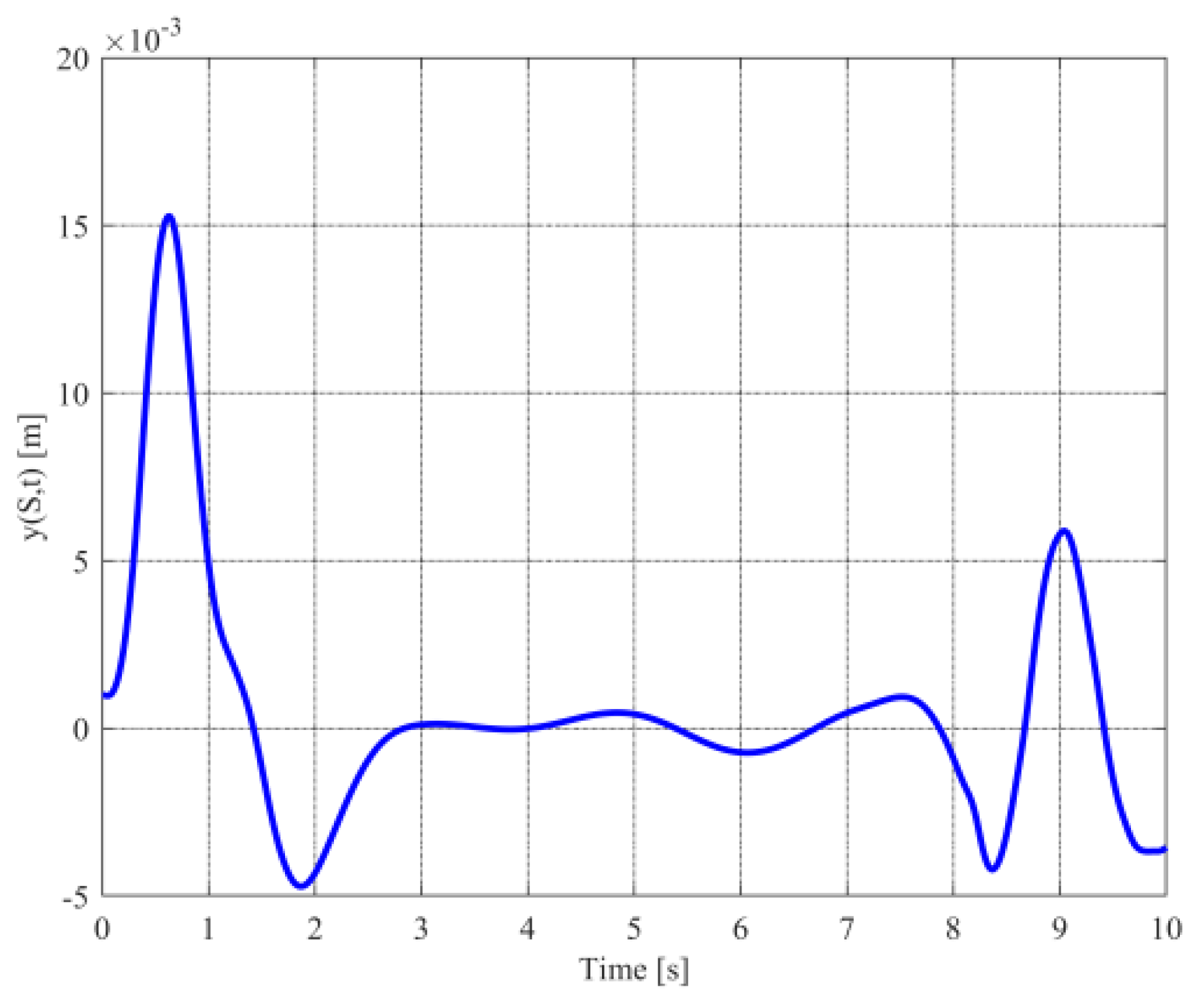
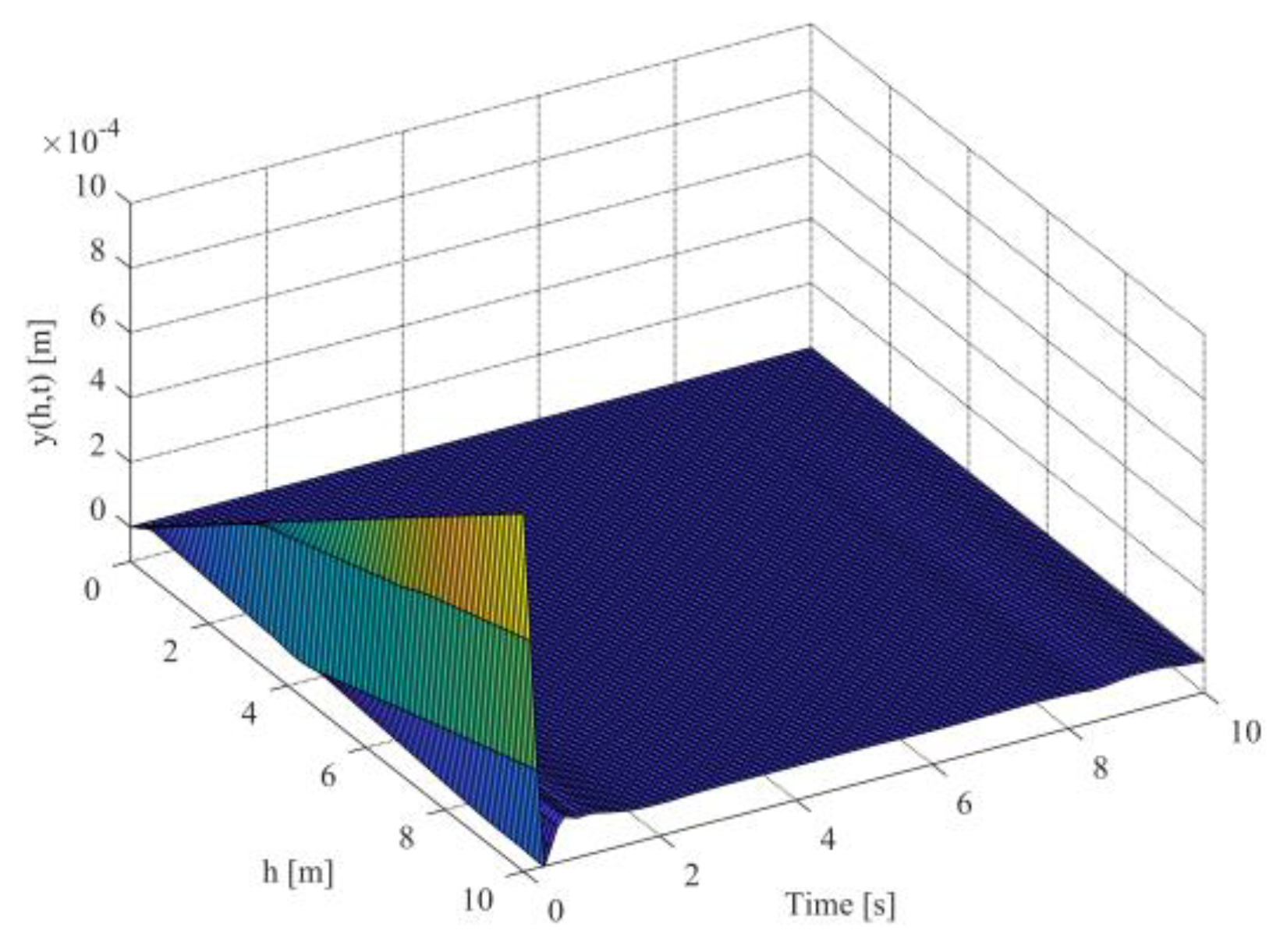
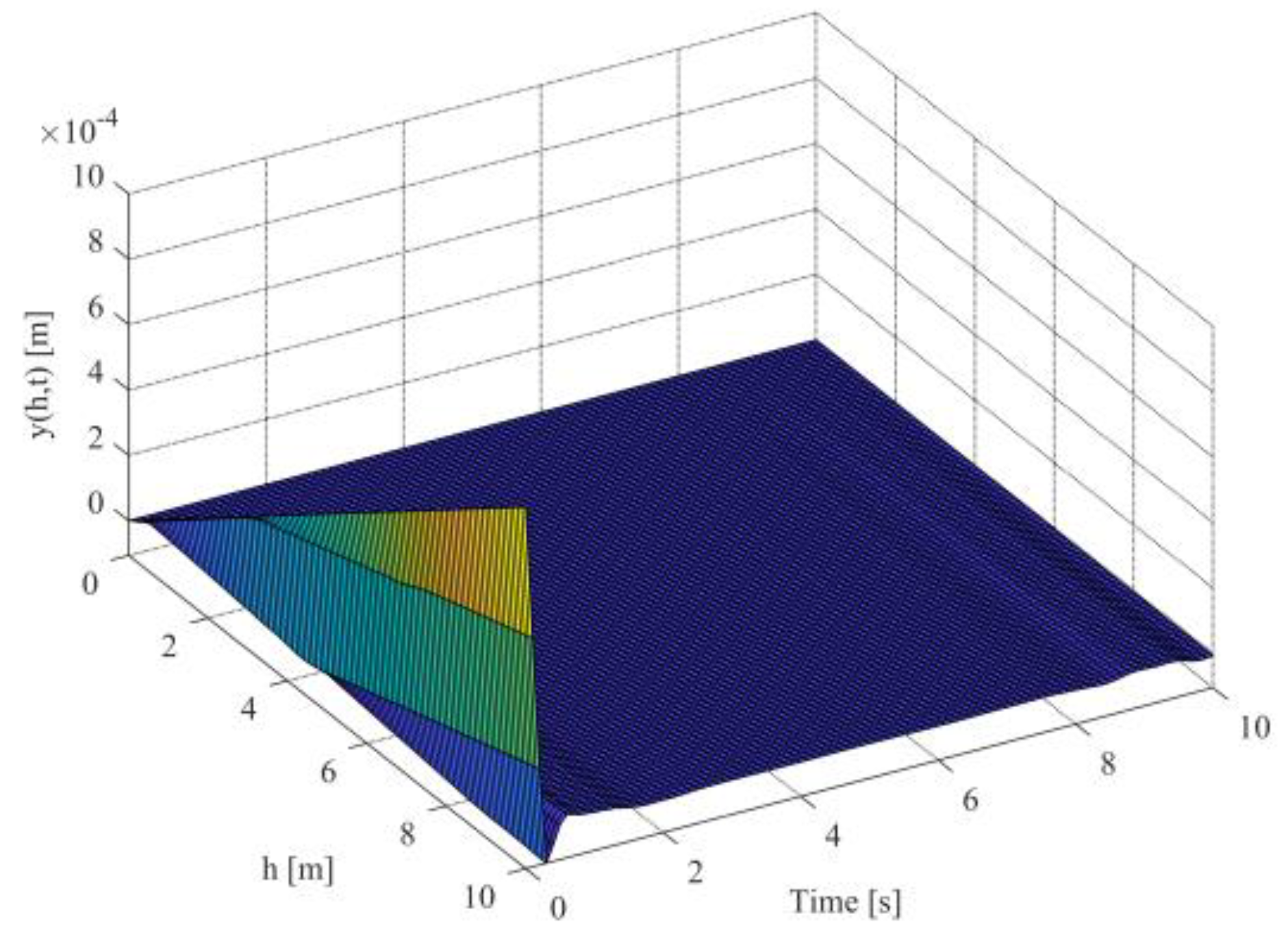
The three-dimensional vibration graph is shown in
Figure 2, and the vibration image of
is given in
Figure 3. From
Figure 2 and
Figure 3, we can clearly see that the belt system suffers from considerable vibration, which may lead to instability, and normal operation will be affected in practice.
Considering the situation when
can be directly used by the controller.
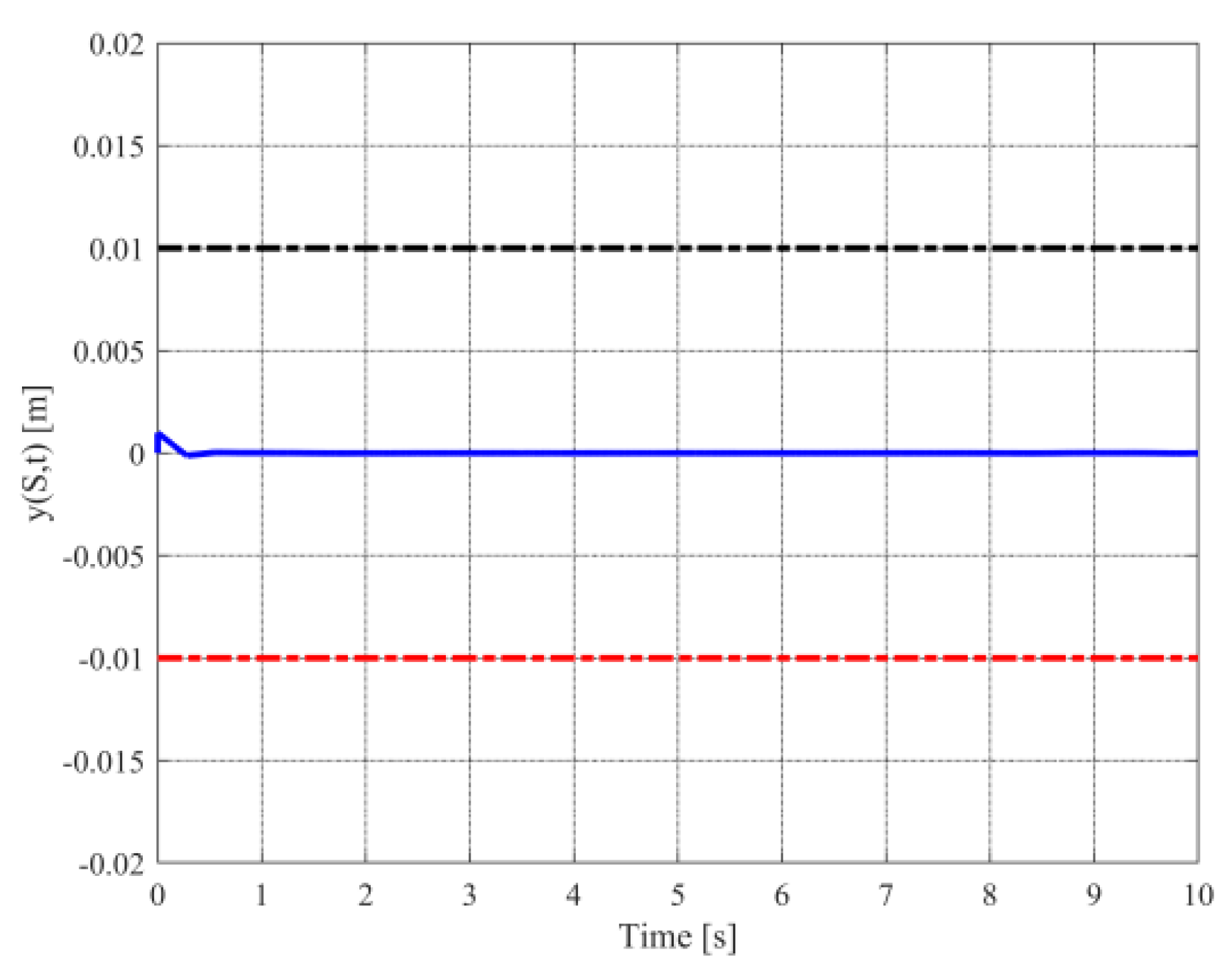
Figure 4 describes the displacement of belt under the state feedback boundary controller
. It is obvious that the system becomes steady quickly.
Figure 5 expresses the corresponding trajectory of the boundary vibration
, which implies that
holds all the time, i.e., the constraint conditions for
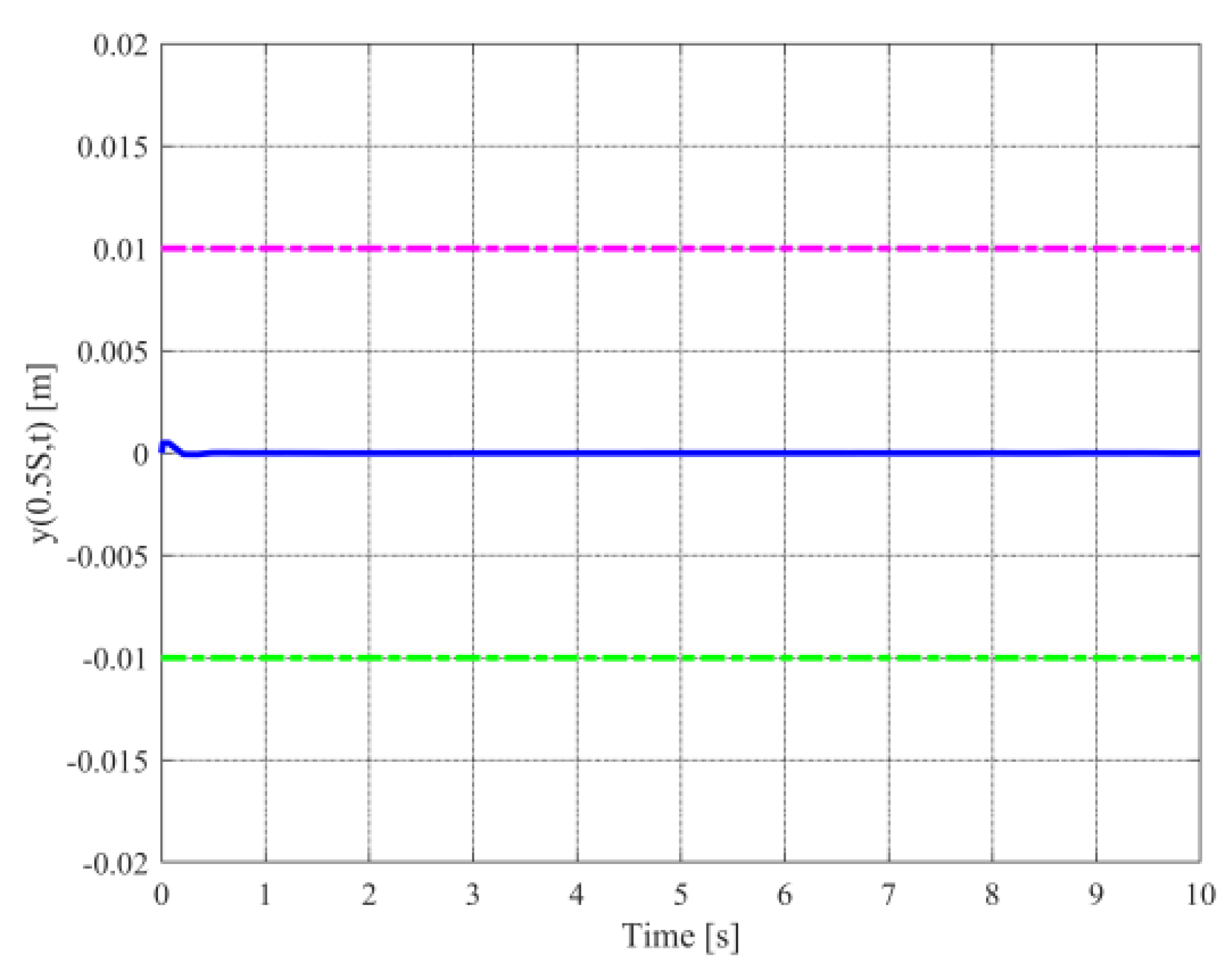
are satisfied. In order to further illustrate the control performance, we give the vibration curve at
in
Figure 6. It is easy to see that the vibration is within a small neighborhood of the equilibrium position.
Considering the state
cannot be directly used in the controller. In
Figure 7, the system vibration map under the output feedback controller
is given. It is concluded that although the state signal
is unavailable, the system can also become stable through the output feedback controller
. The curve of the boundary vibration
is shown in
Figure 8, from which we know that it meets the constraint conditions. Similarly, to further illustrate the control performance, we select the vibration image at
m in
Figure 9, which shows that the vibration at
m is bounded and very small.
Figure 10 shows the error between the true and estimated values of state
. The error is small and bounded, which, to a certain extent, explains the effectiveness of the designed observer.
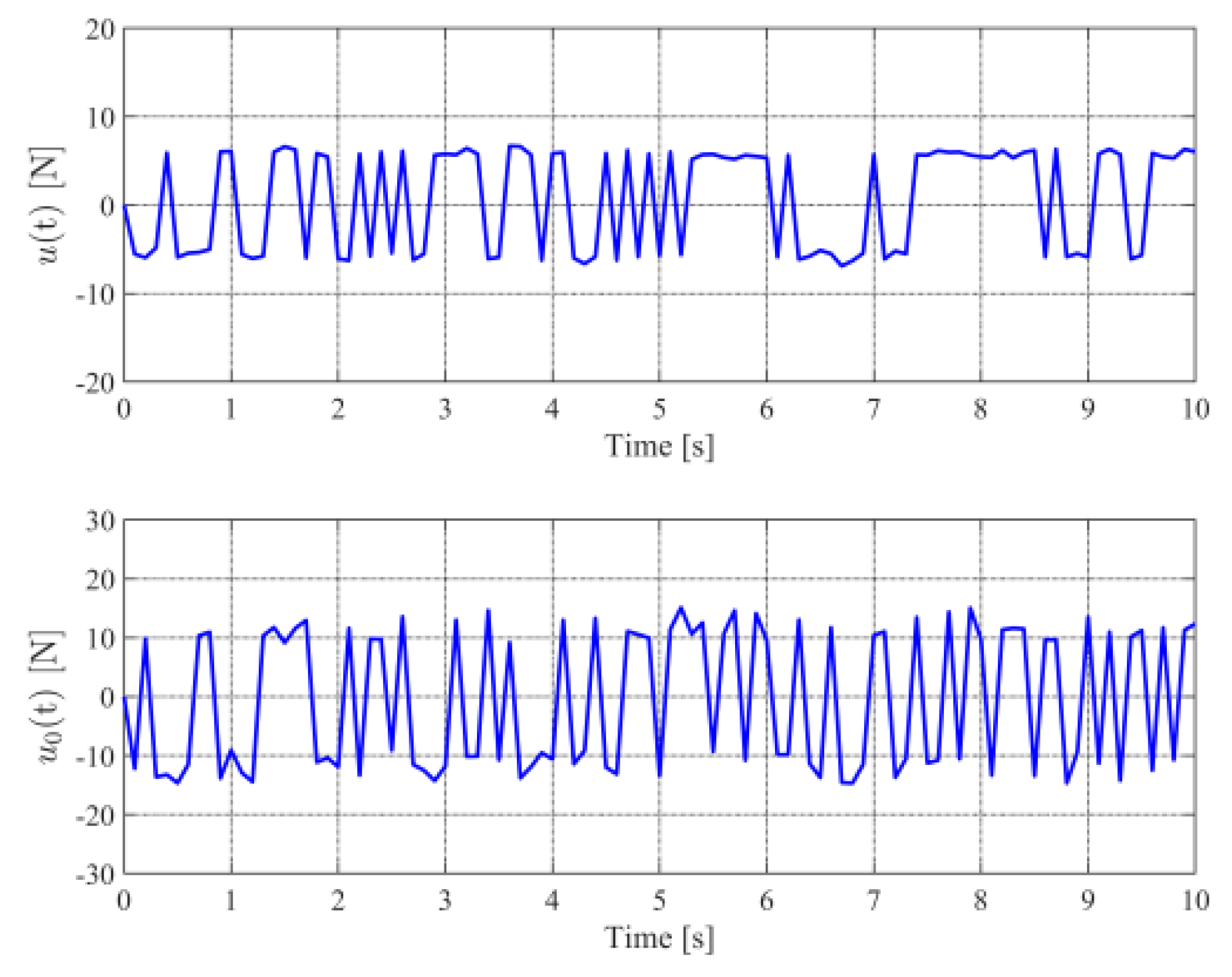
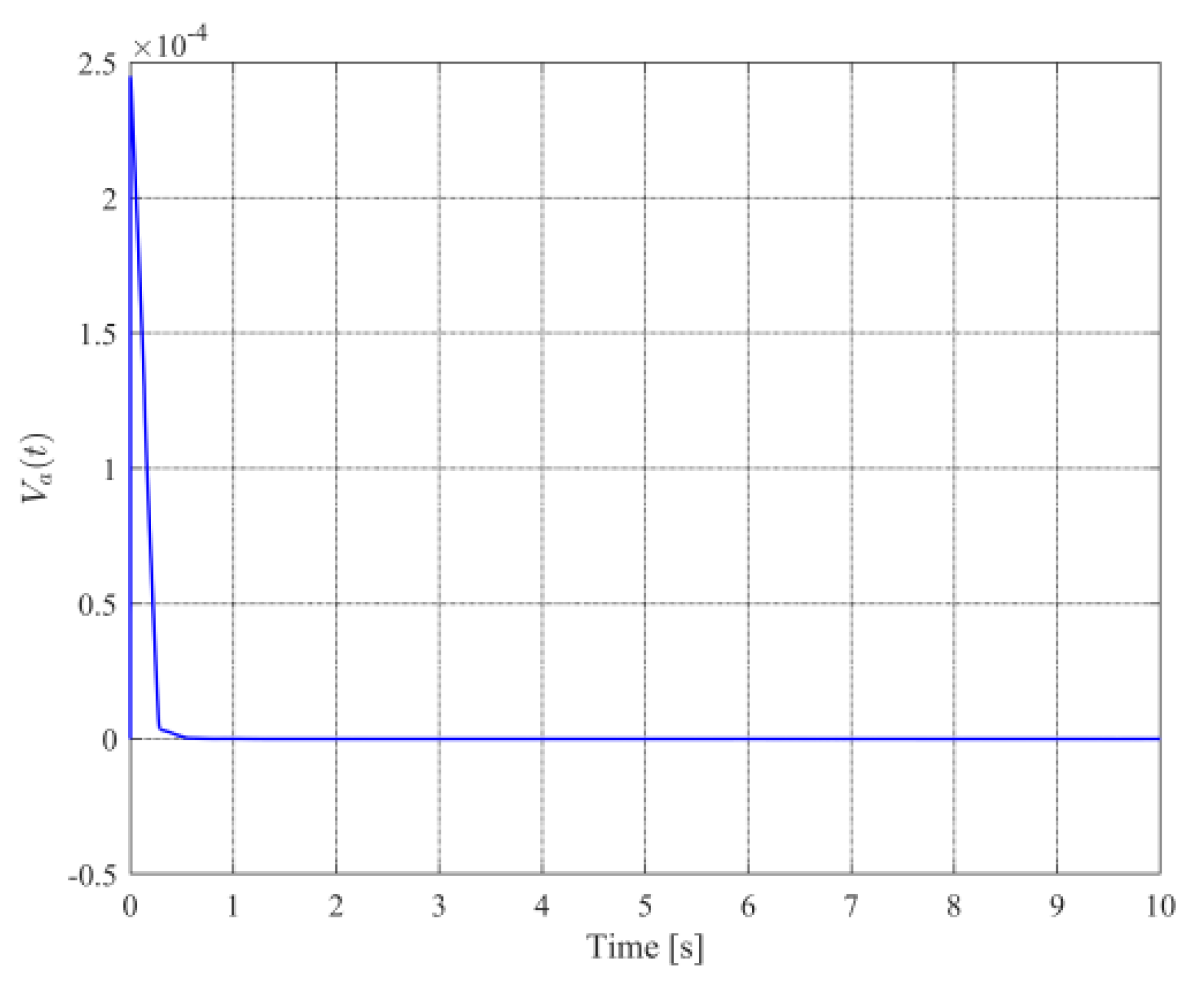
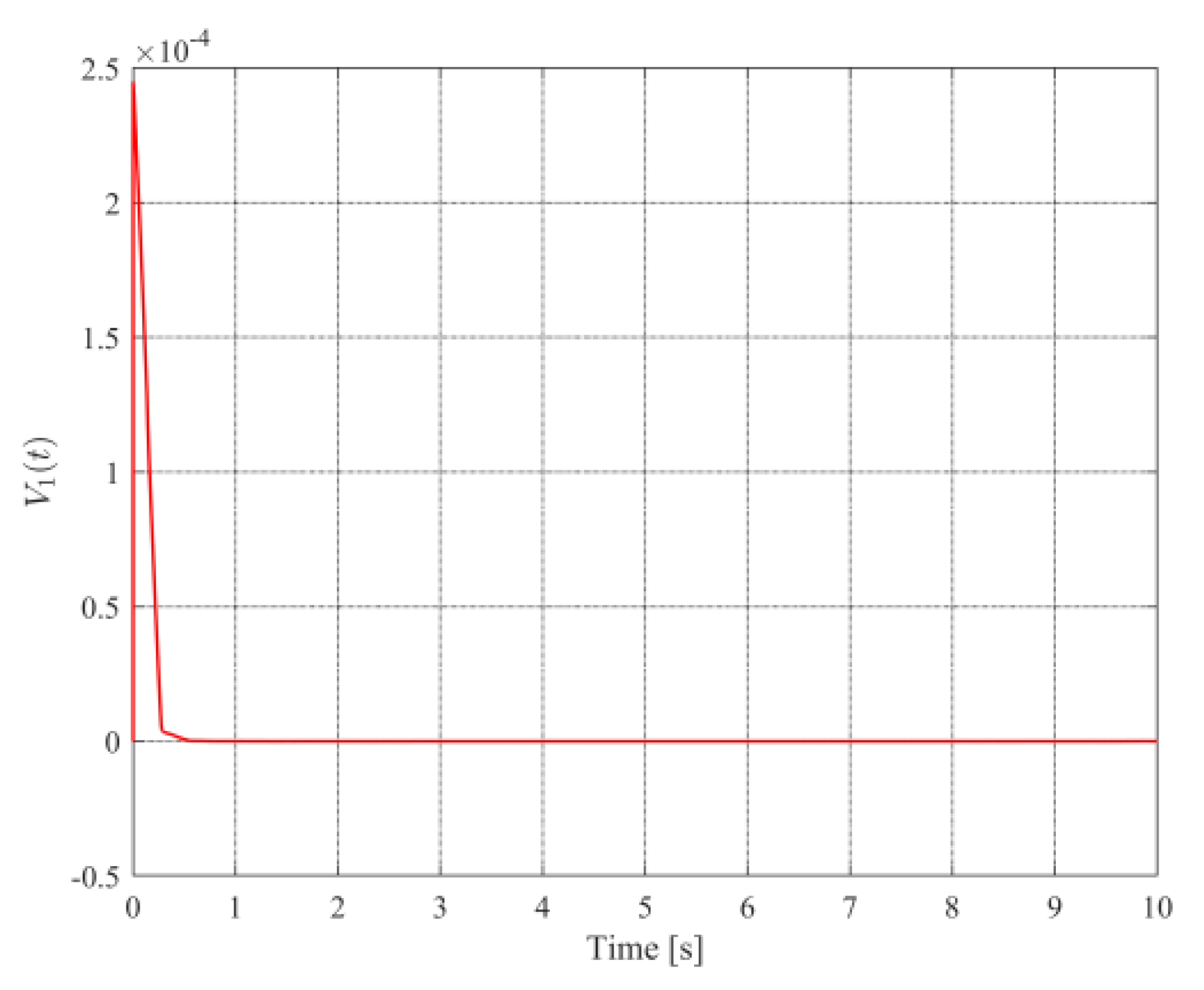
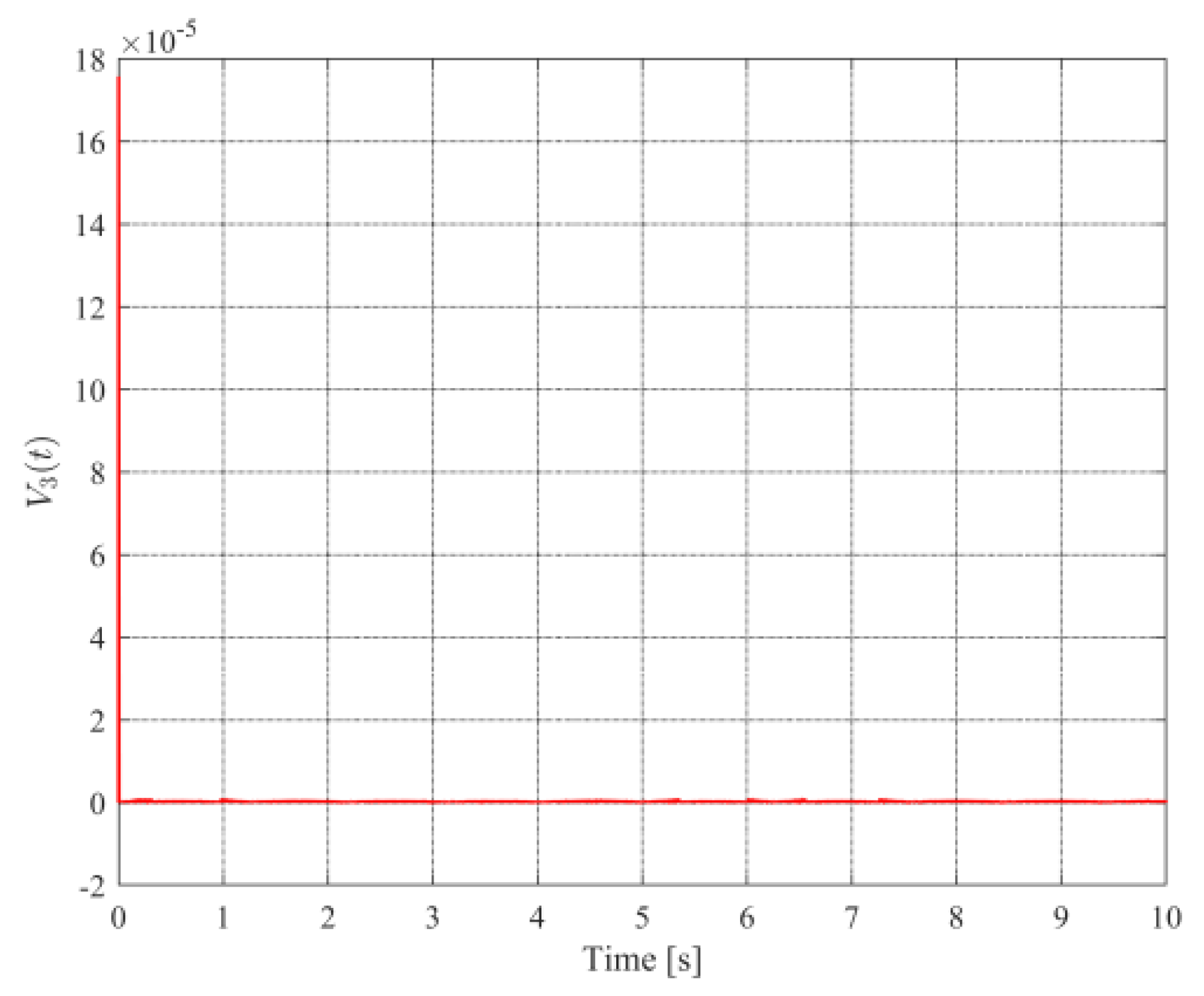
Figure 11 describes the trajectories of two controllers, it can also clearly be seen that the two controllers are bounded. Further, for the Lyapunov function candidates constructed for the considered two cases, we show their trajectories over time with
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16,
Figure 17,
Figure 18 and
Figure 19. It can be clearly seen that
and
are positive, definite, and bounded, thus indicating the suitability of our designed Lyapunov function candidates.
In conclusion, our designed state feedback and output feedback boundary control schemes can effectively deal with the system boundary vibration constraints and suppress the transverse vibration of the system, indicating that the two developed controllers stabilize the horizontal belt system with good performance.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}