
Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (i)
- The proposed SMC control can effectively compensate the unknown dynamic. Since the adaptive NN strategy is integrated in the control design, the proposed nonlinear SMC control can avoid requiring accurate dynamic acknowledge.
- (ii)
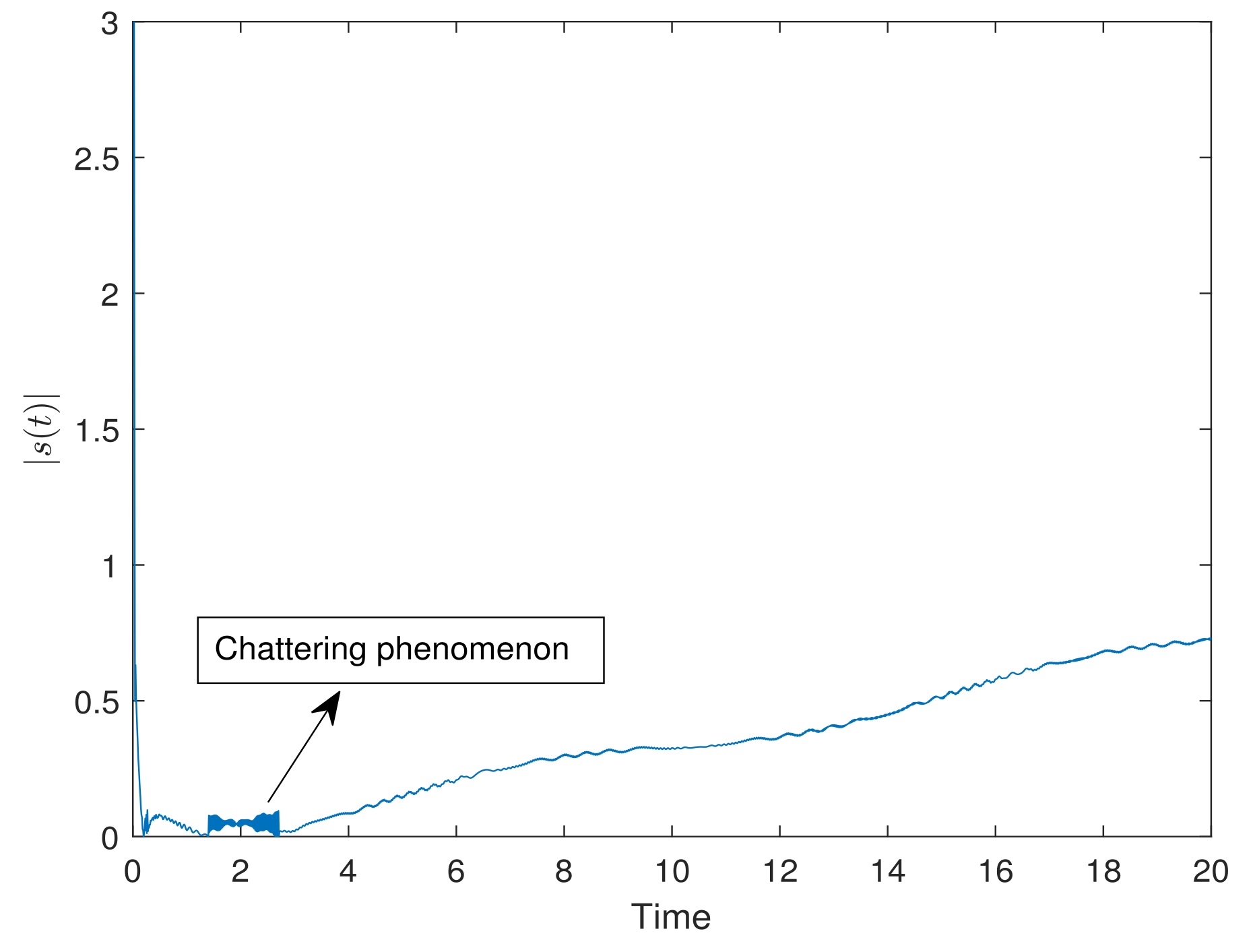
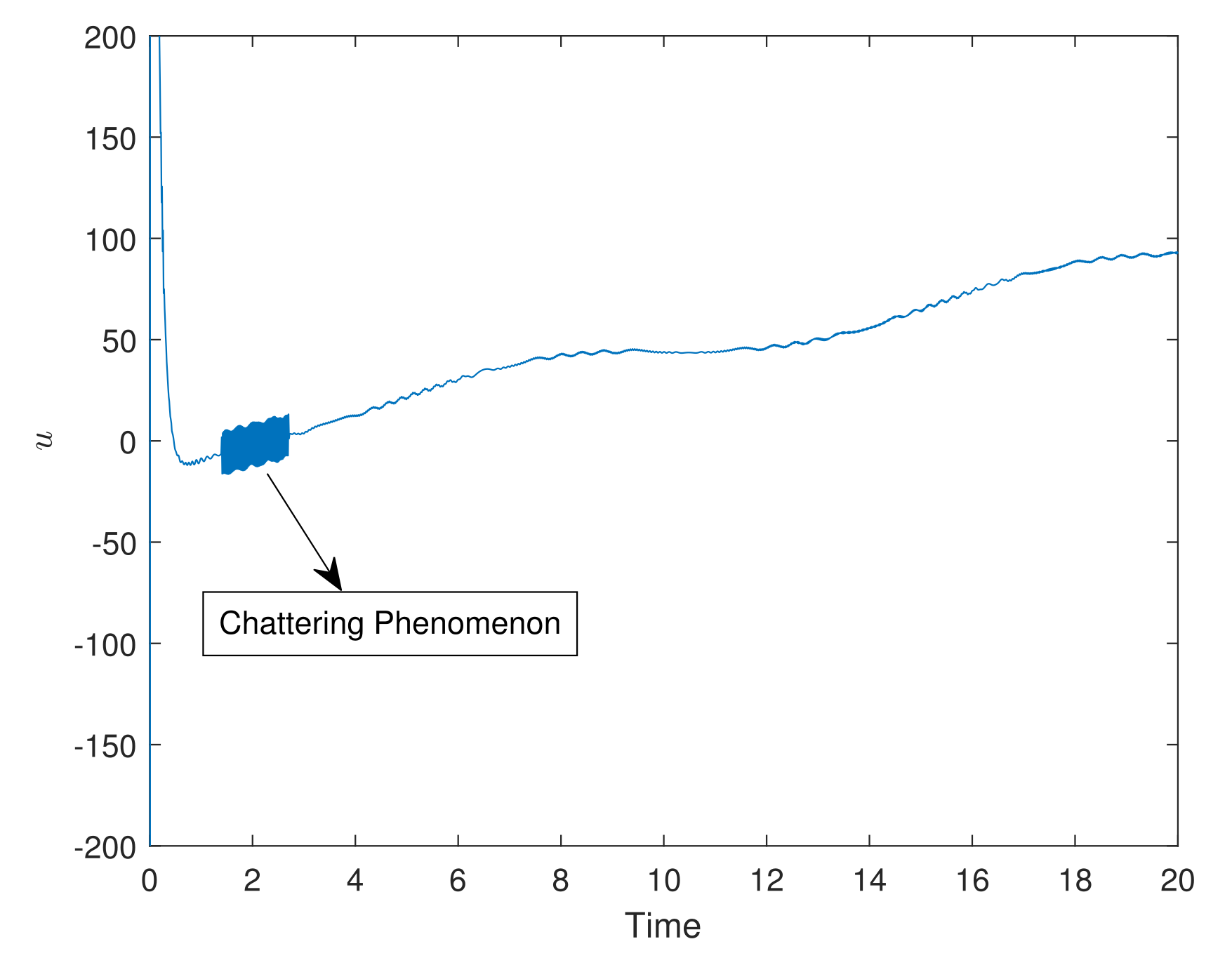
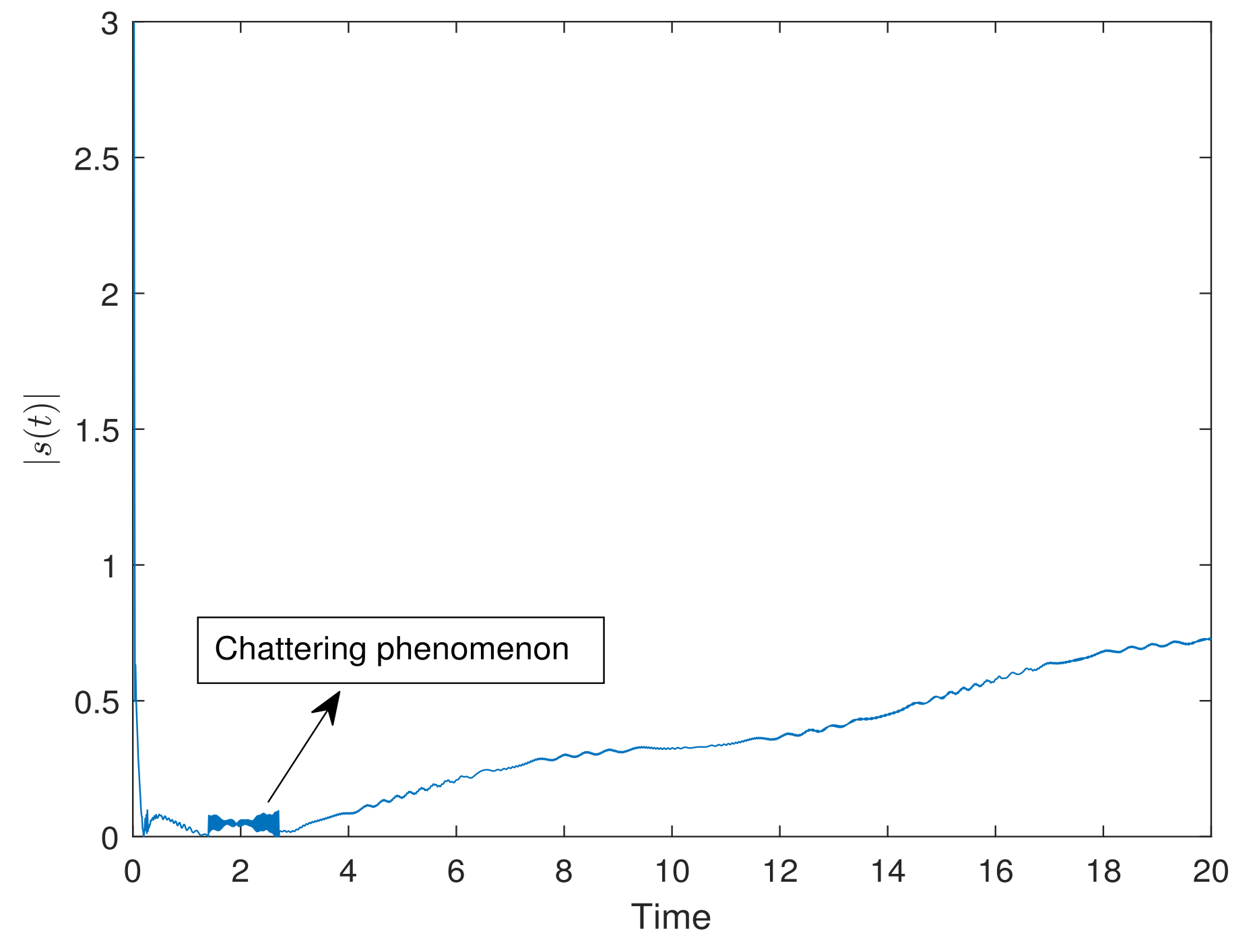
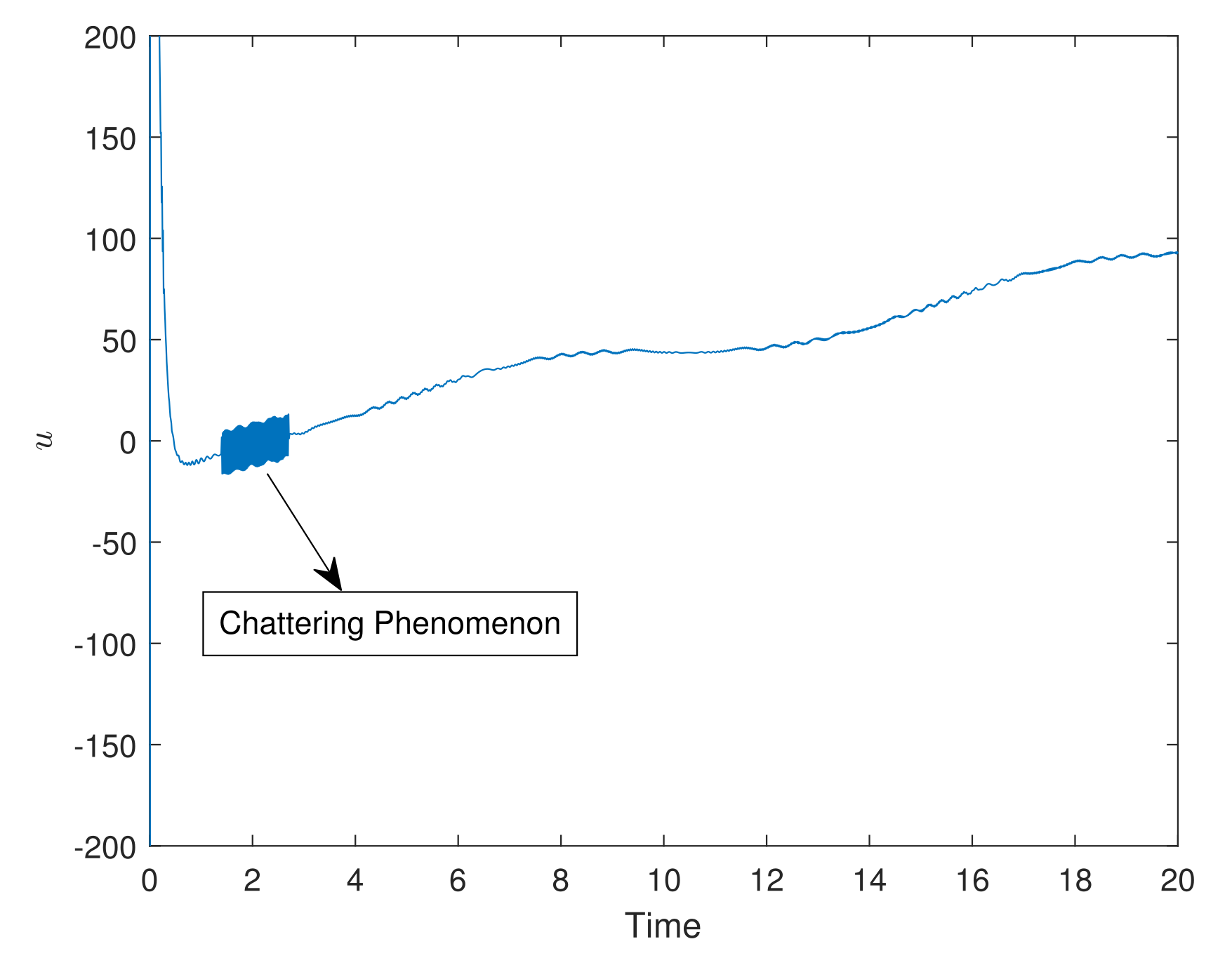
- The proposed SMC control can effectively alleviate the chattering problem by using the boundary layer. Since this method is to use the continuous proportional function to replace the discontinuous switching control, it can be more easily implemented.
2. Problem Statement
3. Main Results
4. Stability Analysis
- ( 1 )
- All error signals,of the closed loop control are SGUUB.
- ( 2 )
- The tracking errorconverges to a small neighborhood of zero.
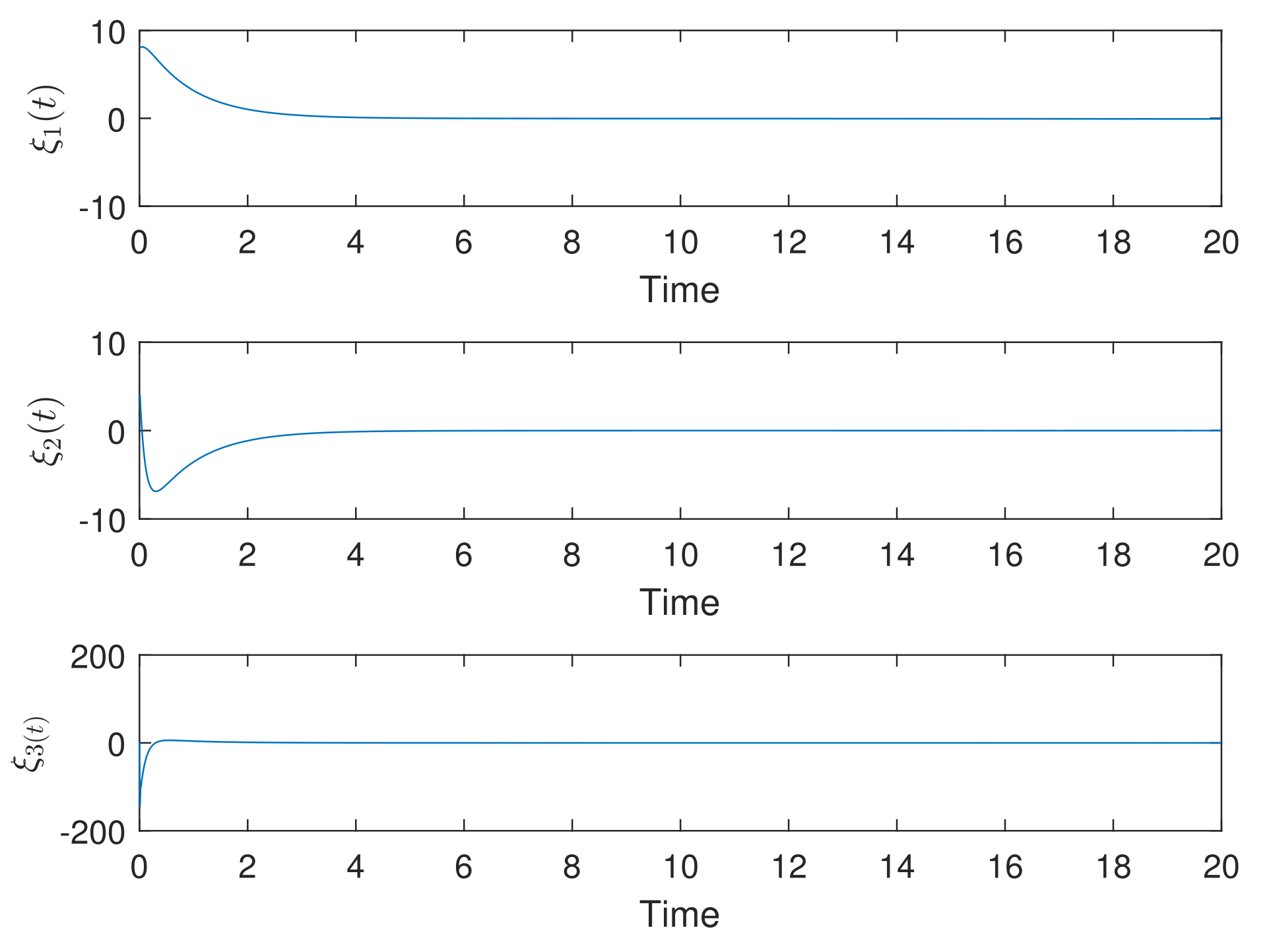
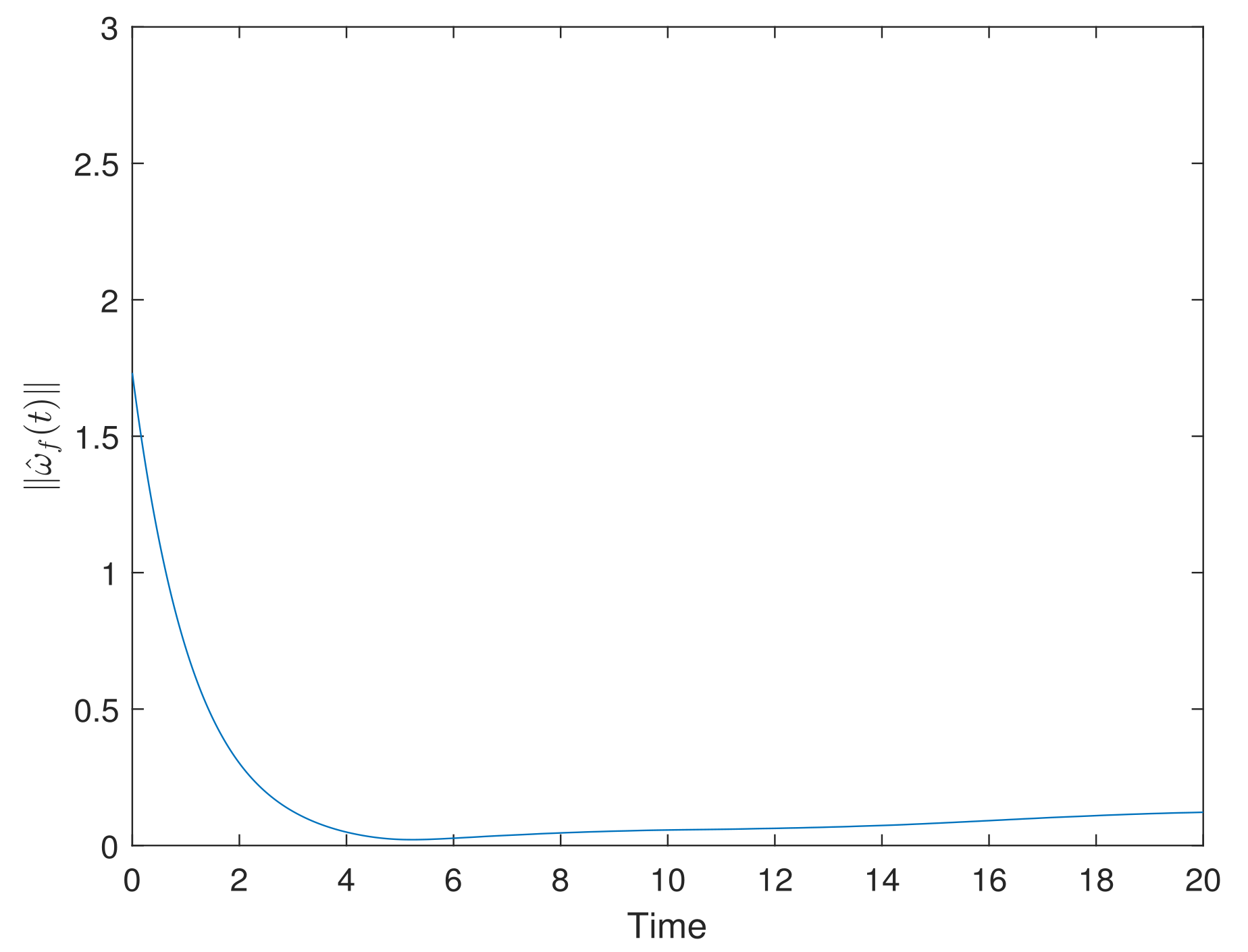
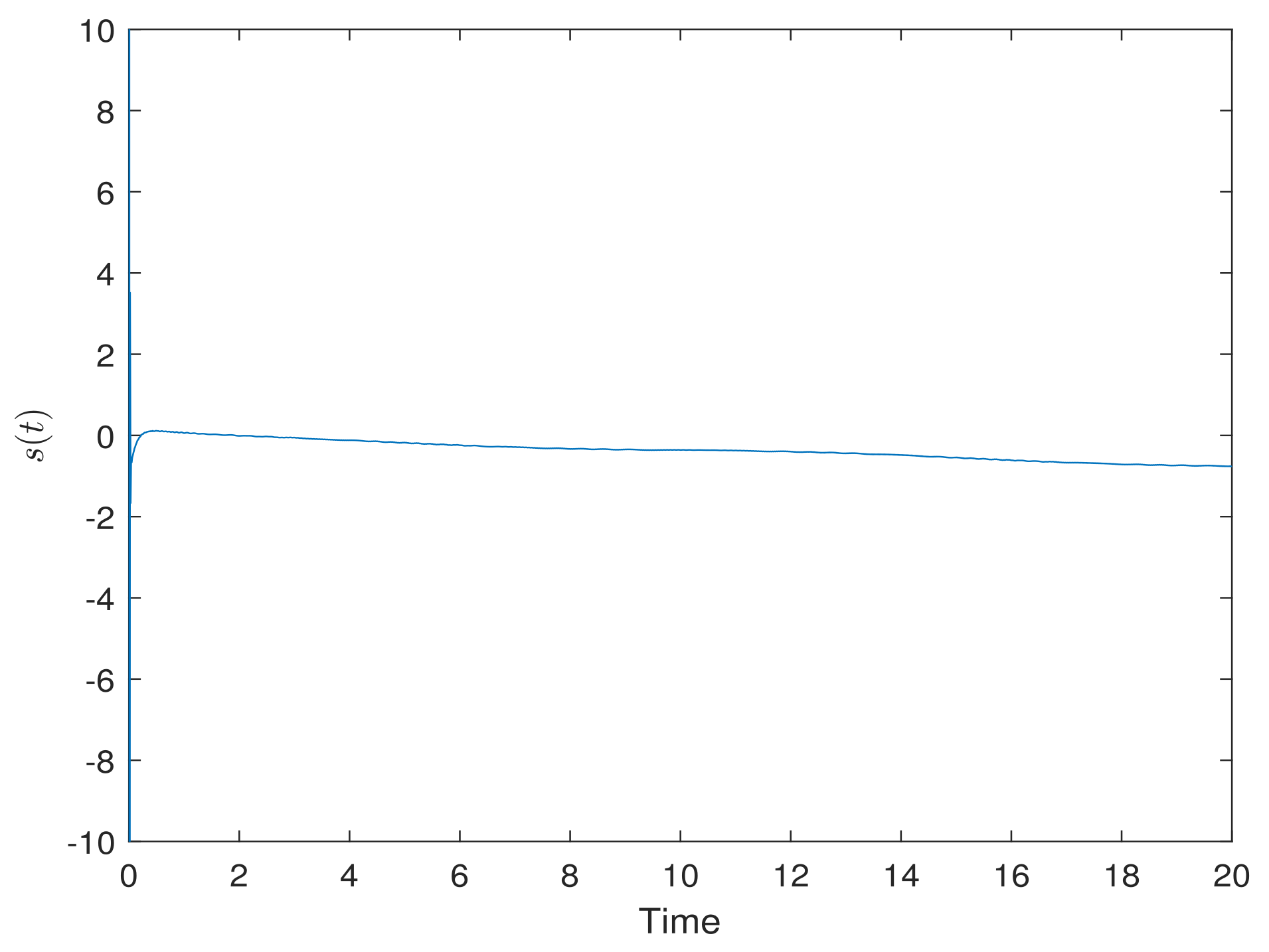
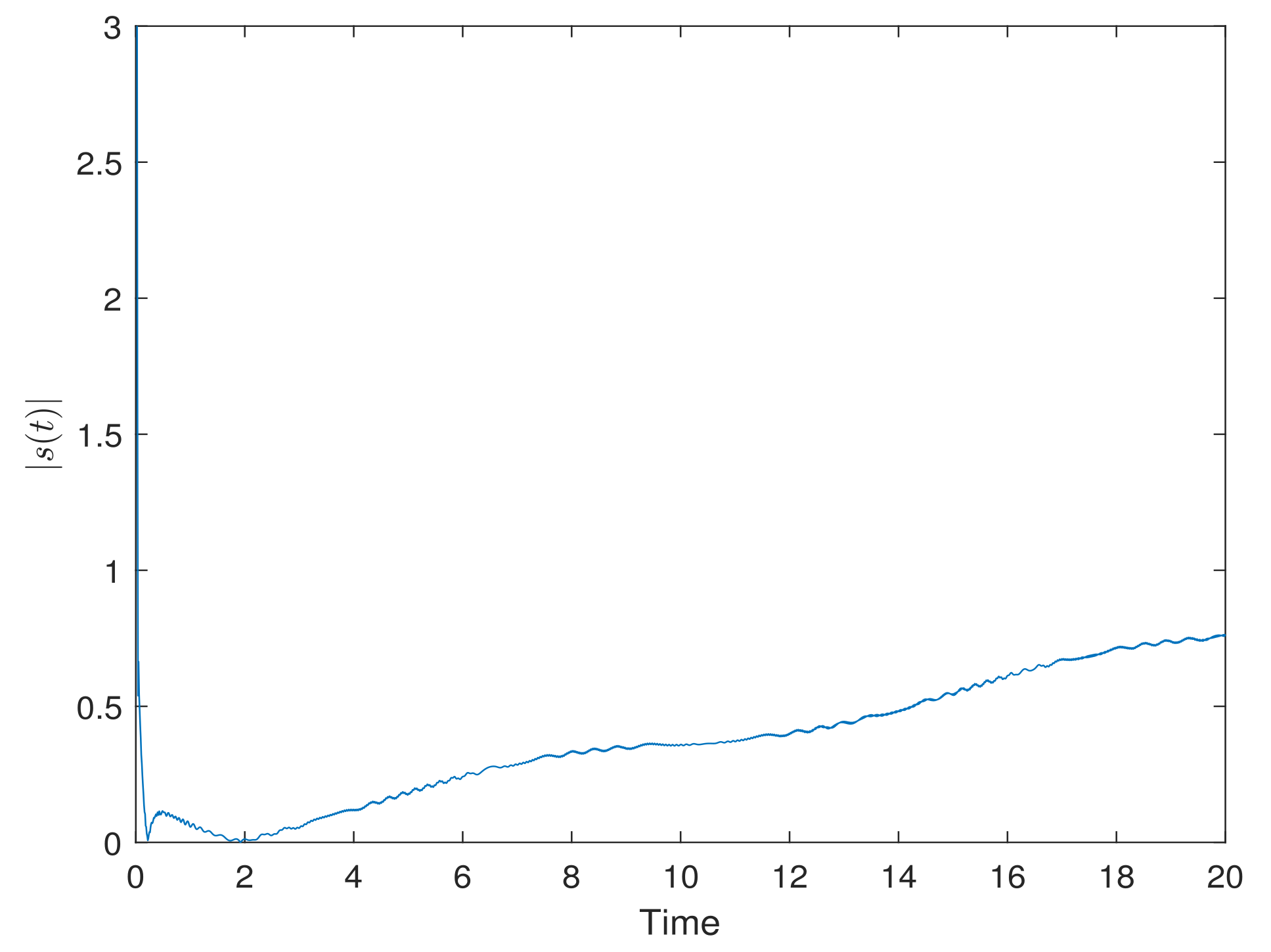
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hauser, J.; Sastry, S.; Meyer, G. Nonlinear control design for slightly non-minimum phase systems: Application to V/STOL aircraft. Automatica 1992, 28, 665–679. [Google Scholar] [CrossRef]
- Soares, O.; Gonçalves, H.; Martins, A.; Carvalho, A. Nonlinear control of the doubly-fed induction generator in wind power systems. Renew. Energy 2010, 35, 1662–1670. [Google Scholar] [CrossRef]
- Sirouspour, M.; Salcudean, S. Nonlinear control of hydraulic robots. IEEE Trans. Robot. Autom. 2001, 17, 173–182. [Google Scholar] [CrossRef] [Green Version]
- Polyakov, A. Sliding mode control design using canonical homogeneous norm. Int. J. Robust Nonlinear Control 2019, 29, 682–701. [Google Scholar] [CrossRef] [Green Version]
- Difonzo, F.V. Isochronous Attainable Manifolds for Piecewise Smooth Dynamical Systems. Qual. Theory Dyn. Syst. 2022, 21, 6. [Google Scholar] [CrossRef]
- Kaklamanos, P.; Kristiansen, K.U. Regularization and Geometry of Piecewise Smooth Systems with Intersecting Discontinuity Sets. SIAM J. Appl. Dyn. Syst. 2019, 18, 1225–1264. [Google Scholar] [CrossRef]
- Utkin, V.I.; Poznyak, A.S. Adaptive sliding mode control with application to super-twist algorithm: Equivalent control method. Automatica 2013, 49, 39–47. [Google Scholar] [CrossRef]
- Han, Y.; Liu, X. Continuous higher-order sliding mode control with time-varying gain for a class of uncertain nonlinear systems. ISA Trans. 2016, 62, 193–201. [Google Scholar] [CrossRef]
- SIRA-RAMÍREZ, H. On the dynamical sliding mode control of nonlinear systems. Int. J. Control 1993, 57, 1039–1061. [Google Scholar] [CrossRef]
- Polyakov, A.; Fridman, L. Stability notions and Lyapunov functions for sliding mode control systems. J. Frankl. Inst. 2014, 351, 1831–1865. [Google Scholar] [CrossRef] [Green Version]
- Precup, R.E.; Radac, M.B.; Roman, R.C.; Petriu, E.M. Model-free sliding mode control of nonlinear systems: Algorithms and experiments. Inf. Sci. 2017, 381, 176–192. [Google Scholar] [CrossRef]
- Yang, X.; Lu, J. Finite-Time Synchronization of Coupled Networks with Markovian Topology and Impulsive Effects. IEEE Trans. Autom. Control 2016, 61, 2256–2261. [Google Scholar] [CrossRef]
- Bartolini, G.; Pisano, A.; Punta, E.; Usai, E. A survey of applications of second-order sliding mode control to mechanical systems. Int. J. Control 2003, 76, 875–892. [Google Scholar] [CrossRef]
- Islam, S.; Liu, X.P. Robust Sliding Mode Control for Robot Manipulators. IEEE Trans. Ind. Electron. 2011, 58, 2444–2453. [Google Scholar] [CrossRef]
- Utkin, V. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Wu, Q.X.; Cui, R.X. Terminal sliding mode tracking control for a class of SISO uncertain nonlinear systems. ISA Trans. 2013, 52, 198–206. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, Z.C.; Liu, F.; Li, P.; Xie, G. Bio-Inspired Speed Curve Optimization and Sliding Mode Tracking Control for Subway Trains. IEEE Trans. Veh. Technol. 2019, 68, 6331–6342. [Google Scholar] [CrossRef]
- Yao, D.; Li, H.; Lu, R.; Shi, Y. Distributed Sliding-Mode Tracking Control of Second-Order Nonlinear Multiagent Systems: An Event-Triggered Approach. IEEE Trans. Cybern. 2020, 50, 3892–3902. [Google Scholar] [CrossRef]
- Wen, G.; Xu, L.; Li, B. Optimized Backstepping Tracking Control Using Reinforcement Learning for a Class of Stochastic Nonlinear Strict-Feedback Systems. IEEE Trans. Neural Netw. Learn. Syst. 2022. early access. [Google Scholar] [CrossRef]
- Wen, G.; Li, B.; Niu, B. Optimized Backstepping Control Using Reinforcement Learning of Observer-Critic-Actor Architecture Based on Fuzzy System for a Class of Nonlinear Strict-Feedback Systems. IEEE Trans. Fuzzy Syst. 2022. early access. [Google Scholar] [CrossRef]
- Fischle, K.; Schroder, D. An improved stable adaptive fuzzy control method. IEEE Trans. Fuzzy Syst. 1999, 7, 27–40. [Google Scholar] [CrossRef]
- Khonchaiyaphum, I.; Samorn, N.; Botmart, T.; Mukdasai, K. Finite-Time Passivity Analysis of Neutral-Type Neural Networks with Mixed Time-Varying Delays. Mathematics 2021, 9, 3321. [Google Scholar] [CrossRef]
- Singkibud, K.M.P. Robust passivity analysis of uncertain neutral-type neural networks with distributed interval time-varying delay under the effects of leakage delay. J. Math. Comput. Sci. 2022, 26, 269–290. [Google Scholar] [CrossRef]
- Tang, R.; Su, H.; Zou, Y.; Yang, X. Finite-Time Synchronization of Markovian Coupled Neural Networks with Delays via Intermittent Quantized Control: Linear Programming Approach. IEEE Trans. Neural Netw. Learn. Syst. 2021. early access. [Google Scholar] [CrossRef]
- Plestan, F.; Shtessel, Y.; Brégeault, V.; Poznyak, A. New methodologies for adaptive sliding mode control. Int. J. Control 2010, 83, 1907–1919. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive Sliding-Mode Control for Nonlinear Systems with Uncertain Parameters. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2008, 38, 534–539. [Google Scholar] [CrossRef]
- Tang, R.; Yang, X.; Wan, X. Finite-time cluster synchronization for a class of fuzzy cellular neural networks via non-chattering quantized controllers. Neural Netw. 2019, 113, 79–90. [Google Scholar] [CrossRef]
- Tang, R.; Yang, X.; Wan, X.; Zou, Y.; Cheng, Z.; Fardoun, H.M. Finite-time synchronization of nonidentical BAM discontinuous fuzzy neural networks with delays and impulsive effects via non-chattering quantized control. Commun. Nonlinear Sci. Numer. Simul. 2019, 78, 104893. [Google Scholar] [CrossRef]
- Utkin, V.; Lee, H. Chattering problem in sliding mode control systems. IFAC Proc. Vol. 2006, 39, 1. [Google Scholar] [CrossRef]
- Bartolini, G.; Ferrara, A.; Utkin, V. Adaptive sliding mode control in discrete-time systems. Automatica 1995, 31, 769–773. [Google Scholar] [CrossRef]
- Yang, X.; Lam, J.; Ho, D.W.C.; Feng, Z. Fixed-Time Synchronization of Complex Networks with Impulsive Effects via Nonchattering Control. IEEE Trans. Autom. Control 2017, 62, 5511–5521. [Google Scholar] [CrossRef]
- Parra-Vega, V.; Hirzinger, G. Chattering-free sliding mode control for a class of nonlinear mechanical systems. Int. J. Robust Nonlinear Control 2001, 11, 1161–1178. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Han, F. On nonsingular terminal sliding-mode control of nonlinear systems. Automatica 2013, 49, 1715–1722. [Google Scholar] [CrossRef]
- Guo, Y.; Huang, B.; Li, A.J.; Wang, C.Q. Integral sliding mode control for Euler–Lagrange systems with input saturation. Int. J. Robust Nonlinear Control 2019, 29, 1088–1100. [Google Scholar] [CrossRef]
- Feng, Y.; Han, F.; Yu, X. Chattering free full-order sliding-mode control. Automatica 2014, 50, 1310–1314. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, G.; Yi, B.; Zhang, W. Practical proportional integral sliding mode control for underactuated surface ships in the fields of marine practice. Ocean Eng. 2017, 142, 217–223. [Google Scholar] [CrossRef]
- Mobayen, S. An adaptive chattering-free PID sliding mode control based on dynamic sliding manifolds for a class of uncertain nonlinear systems. Nonlinear Dyn. 2015, 82, 53–60. [Google Scholar] [CrossRef]
- Boiko, I.M. Chattering in sliding mode control systems with boundary layer approximation of discontinuous control. Int. J. Syst. Sci. 2013, 44, 1126–1133. [Google Scholar] [CrossRef]
- Kuo, T.C.; Huang, Y.J.; Chang, S.H. Sliding mode control with self-tuning law for uncertain nonlinear systems. ISA Trans. 2008, 47, 171–178. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Ge, S.S. Simplified Optimized Backstepping Control for a Class of Nonlinear Strict-Feedback Systems with Unknown Dynamic Functions. IEEE Trans. Cybern. 2021, 51, 4567–4580. [Google Scholar] [CrossRef]
- Li, S.; An, X.; Ding, L.; Wang, Q.; Gao, H.; Hou, Y.; Deng, Z. Adaptive Neural Network-Based Finite-Time Tracking Control for Nonstrict Nonaffined MIMO Nonlinear Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 4814–4824. [Google Scholar] [CrossRef]
- Zhu, J.; Wen, G.; Li, B. Decentralized adaptive formation control based on sliding mode strategy for a class of second-order nonlinear unknown dynamic multi-agent systems. Int. J. Adapt. Control. Signal Process. 2022, 36, 1045–1058. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Li, B. Optimized Formation Control Using Simplified Reinforcement Learning for a Class of Multiagent Systems with Unknown Dynamics. IEEE Trans. Ind. Electron. 2020, 67, 7879–7888. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Zhu, J.; Zhou, R.; Wen, G. Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems. Mathematics 2022, 10, 1182. https://doi.org/10.3390/math10071182
Li B, Zhu J, Zhou R, Wen G. Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems. Mathematics. 2022; 10(7):1182. https://doi.org/10.3390/math10071182
Chicago/Turabian StyleLi, Bin, Jiahao Zhu, Ranran Zhou, and Guoxing Wen. 2022. "Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems" Mathematics 10, no. 7: 1182. https://doi.org/10.3390/math10071182
APA StyleLi, B., Zhu, J., Zhou, R., & Wen, G. (2022). Adaptive Neural Network Sliding Mode Control for a Class of SISO Nonlinear Systems. Mathematics, 10(7), 1182. https://doi.org/10.3390/math10071182