
IFS-Based Image Reconstruction of Binary Images with Functional Networks

 , , , ,
, , , ,  , and
, and
Abstract
1. Introduction
1.1. Motivation
1.2. Previous Work
1.3. Aim and Main Contributions of This Paper
- Novelty: As discussed above, a major feature of the functional networks is their ability to replicate the mathematical structure of any given problem. This feature is not present in other artificial intelligence paradigms such as neural networks, where the activation function belongs to some prescribed families of functions unrelated to the problem at hand, and the learning process is driven by the scalar weights. On the contrary, the functional networks can learn the mathematical formulation of any functional expression by using functions of one or several variables instead of weights. This makes them very well-suited for problems such as the one addressed in this paper. In spite of these powerful features, to the best of our knowledge, no previous work reported so far in the literature has applied functional network formalism to the IFS inverse problem. This work opens a promising line of research towards the application of this methodology to the reconstruction of binary images through IFS.
- Generality: The method does not impose any constraints on the input binary image. As a result, it is very general and can be applied to any binary image and for any number of contractive functions. The limitations of previous methods with regard to the number of contractive maps and/or the size of the input images can be avoided with our proposal.
- Good performance: As discussed in Section 6, the method performs quite well, being able to reproduce the input image with good visual quality. The numerical results of the comparative analysis in Section 6.4 also show that this method outperforms other alternative approaches described in the literature, such as neural networks, simulated annealing, genetic algorithms, and the firefly algorithm.
- Low computational complexity: The order of complexity of the method is comparable to state-of-the-art techniques in artificial intelligence such as neural networks, genetic algorithms, or particle swarm optimization. Furthermore, the method requires fewer operations than these alternative methods.
1.4. Structure of This Paper
2. Mathematical Concepts and Definitions
2.1. Contractive Maps and Banach Fixed-Point Theorem
2.2. Iterated Function Systems
2.3. Hausdorff Metric and Hutchinson Operator
2.4. Rendering the IFS Attractor
2.5. The Chaos Game
2.6. The Collage Theorem
3. Functional Networks
3.1. Artificial Neural Networks
3.2. Functional Networks
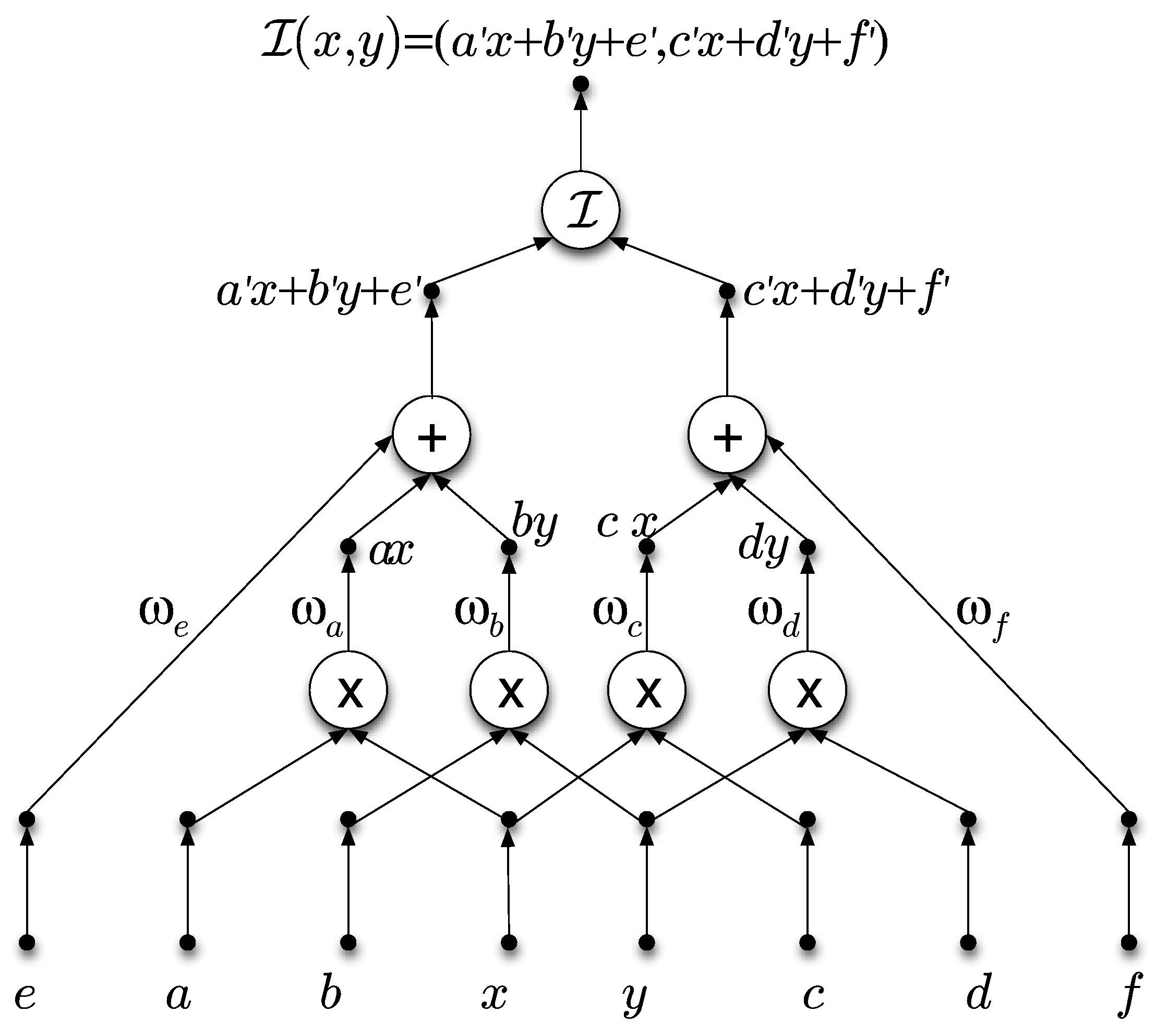
- Layers of neurons. Similar to ANNs, neurons are represented by circles with the name of the corresponding neural function inside. For example, in Figure 1, we have two intermediate layers comprised of four and two neurons, respectively. The neural functions in the first layer and the second layer correspond to the × and the + operators, respectively.
- Layers of storing units. This is a new component with respect to the traditional ANNs. The storing units are not neurons, and they do not process information; their task is to store intermediate information. They are represented graphically by small circles in black. The storing units are optional and generally used to allow connections of more than one neuron output to the same unit. In Figure 1, and moving upwards, we can see a first layer of eight input units storing the input information, a second layer of four storing units containing the products of two inputs, a third layer of two storing units containing the transformations of the initial variable x and y under the action of the affine contractive function in Equation (5), and a fourth (output) layer combining both outputs into a single 2D vector.
- A set of directed links. Similar to ANNs, they are used to connect the input or intermediate layers to its adjacent layer of neurons. These connections are graphically represented by arrows to show the bottom-up flow direction from the input layer to the output layer.
- A set of weights. Similar to ANNs, the output of the neurons can also be modulated by scalar weights. In Figure 1, there are six scalar weights corresponding to the parameters of Equation (5). These weights modify the initial parameters into new values . The weights are not fixed but change dynamically by reinforcement, learning along the iterations during the learning process.
4. The Problem
5. The Method
5.1. Overview of the Method
5.2. Similarity Error Function
6. Computational Procedure and Results
6.1. Computational Procedure
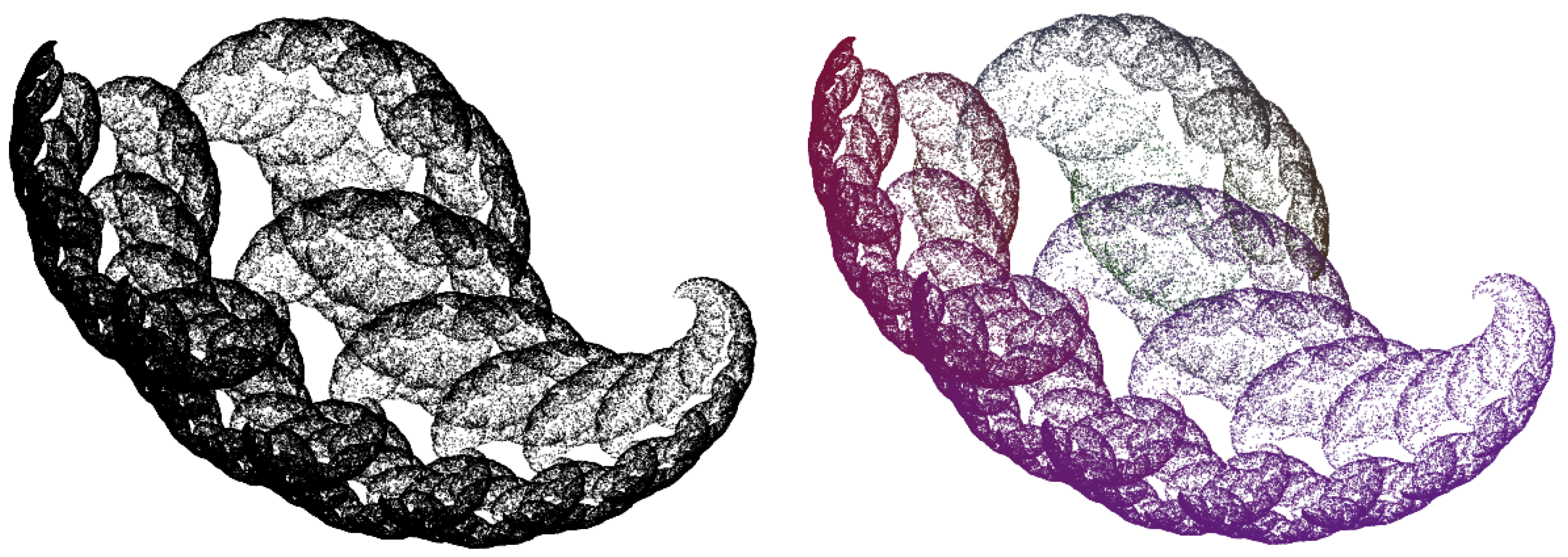
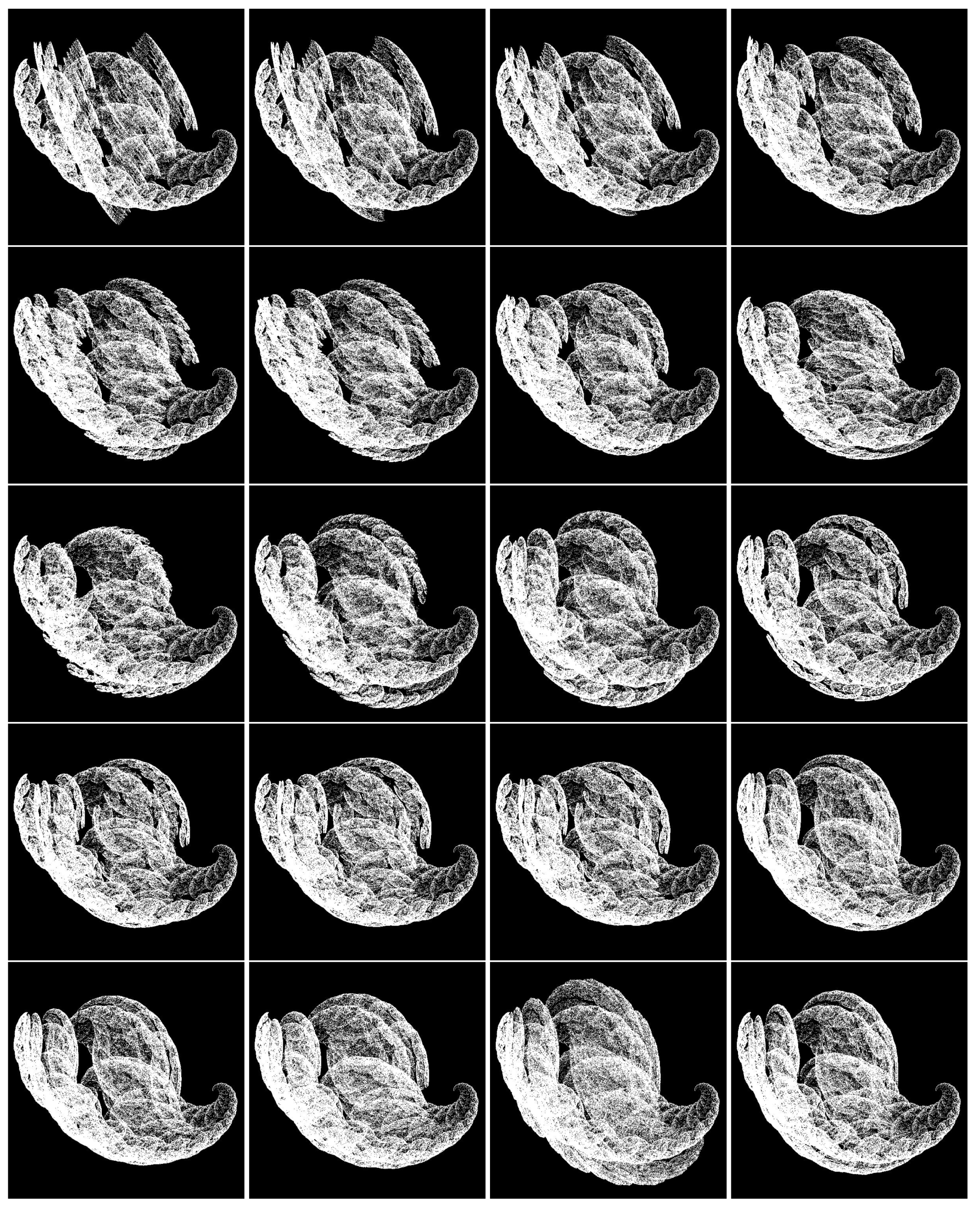
6.2. Graphical Results
6.3. Numerical Results
6.4. Comparison with Other Approaches
6.5. Computational Issues and CPU Times
6.6. Computational Complexity
7. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barnsley, M.F. Fractals Everywhere, 2nd ed.; Academic Press: San Diego, CA, USA, 1993. [Google Scholar]
- Barnsley, M.F.; Hurd, L.P. Fractal Image Compression; AK Peters/CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Falconer, K. Fractal Geometry: Mathematical Foundations and Applications, 2nd ed.; John Wiley & Sons: Chichester, UK, 2003. [Google Scholar]
- Fisher, Y. (Ed.) Fractal Image Compression: Theory and Applications; Springer: Berlin, Germany, 1995. [Google Scholar]
- Peitgen, H.O.; Jurgens, H.; Saupe, D. Chaos and Fractals. New Frontiers of Science; Springer: New York, NY, USA, 1993. [Google Scholar]
- Gutiérrez, J.M.; Iglesias, A.; Rodríguez, M.A.; Rodríguez, V.J. Generating and rendering fractal images. Math. J. 1997, 7, 6–13. [Google Scholar]
- Barnsley, M.F.; Demko, S. Iterated function systems and the global construction of fractals. Proc. R. Soc. Lond. 1985, A399, 243–275. [Google Scholar]
- Barnsley, M.F.; Ervin, V.; Hardin, D.; Lancaster, J. Solution of an inverse problem for fractal and other sets. Proc. Natl. Acad. Sci. USA 1986, 83, 1975–1977. [Google Scholar] [CrossRef] [PubMed]
- Hutchinson, J.E. Fractals and self similarity. Indiana Univ. Math. J. 1981, 30, 713–747. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Process, 4th ed.; Pearson: London, UK, 2018. [Google Scholar]
- Barnsley, M.F.; Sloan, A.D. A better way to compress images. BYTE Magazine, January 1988. [Google Scholar]
- Jacquin, A.E. Image coding based on a fractal theory of iterated contractive image transformations. IEEE Trans. Image Process. 1992, 1, 18–30. [Google Scholar] [CrossRef]
- Berkner, K. A wavelet-based solution to the inverse problem for fractal interpolation functions. In Fractals in Engineering’97; Véhel, L., Lutton, E., Tricot, C., Eds.; Springer: London, UK, 1997. [Google Scholar]
- Wadstromer, N. An approach to the inverse IFS problem using the Kantorovich metric. Fractals 1997, 5, 89–99. [Google Scholar] [CrossRef]
- Abenda, S.; Demko, S.; Turchetti, G. Local moments and inverse problem for fractal measures. Inv. Probl. 1992, 8, 739–750. [Google Scholar] [CrossRef]
- Forte, B.; Vyrscay, E.R. Solving the inverse problem for measures using iterated function systems: A new approach. Adv. Appl. Prob. 1995, 27, 800–820. [Google Scholar] [CrossRef]
- Vyrscay, E.R. Moment and collage methods for the inverse problem of fractal construction with iterated function systems. In Fractals in the Fundamental and Applied Sciences; Peitgen, H.O., Henriques, J.M., Penedo, L.F., Eds.; Elsevier: Amsterdam, The Netherlands, 1991. [Google Scholar]
- Saupe, D.; Hamzaoui, R. A review of the fractal image compression literature. Comput. Graph. 1994, 28, 268–276. [Google Scholar] [CrossRef]
- Gutiérrez, J.M.; Cofino, A.S.; Ivanissevich, M.L. An hybrid evolutive-genetic strategy for the inverse fractal problem of IFS Models. Proceedings of the International 7th Ibero-American Conference on AI, IBERAMIA 2000. In Advances in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1952, pp. 467–476. [Google Scholar]
- Lutton, E.; Véhel, J.L.; Cretin, G.; Glevarec, P.; Roll, C. Mixed IFS: Resolution of the Inverse Problem Using Genetic Programming; INRIA Rapport 2631; INRIA: Rocquencourt, France, 1995. [Google Scholar]
- Wu, M.S.; Teng, W.C.; Jeng, J.H.; Hsieh, J.G. Spatial correlation genetic algorithm for fractal image compression. Chaos Solitons Fractals 2006, 28, 497–510. [Google Scholar] [CrossRef]
- Wu, M.S.; Jeng, J.H.; Hsieh, J.G. Schema genetic algorithm for fractal image compression. Eng. Appl. Artif. Intell. 2007, 20, 531–538. [Google Scholar] [CrossRef]
- Yuan, W.X.; Ping, L.F.; Guo, W.S. Fractal image compression based on spatial correlation and hybrid genetic algorithm. J. Vis. Commun. Image R 2009, 20, 505–510. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, G.R.; Niu, X.X. An improved fractal image compression approach by using iterated function system and genetic algorithm. Comput. Math. Appl. 2006, 51, 1727–1740. [Google Scholar] [CrossRef]
- Dasgupta, D.; Hernandez, G.; Niño, F. An evolutionary algorithm for fractal coding of binary images. IEEE Trans. Evol. Comput. 2000, 4, 172–181. [Google Scholar] [CrossRef]
- Gálvez, A.; Iglesias, A.; Diaz, J.A.; Fister, I.; López, J.; Fister, I., Jr. Modified OFS-RDS bat algorithm for IFS encoding of bitmap fractal binary images. Adv. Eng. Inform. 2021, 47, 101222. [Google Scholar] [CrossRef]
- Muruganandham, A.; Wahida, R.S.D. Adaptive fractal image compression using PSO. Procedia Comput. Sci. 2010, 1, 338–344. [Google Scholar] [CrossRef]
- Tseng, C.C.; Hsieh, J.G.; Jeng, J.H. Fractal image compression using visual-based particle swarm optimization. Image Vis. Comput. 2008, 26, 1154–1162. [Google Scholar] [CrossRef]
- Evans, A.K.; Turner, M.J. Specialisation of evolutionary algorithms and data structures for the IFS inverse problem. In Proceedings of the Second IMA Conference on Image Processing: Mathematical Methods, Algorithms, and Applications; Turner, M.J., Ed.; Ellis Horwood Ltd.: New York, NY, USA, 1998. [Google Scholar]
- Goentzel, B. Fractal image compression with the genetic algorithm. Complex. Int. 1994, 1, 111–126. [Google Scholar]
- Nettleton, D.J.; Garigliano, R. Evolutionary algorithms and a fractal inverse problem. Biosystems 1994, 33, 221–231. [Google Scholar] [CrossRef]
- Shonkwiler, R.; Mendivil, F.; Deliu, A. Genetic algorithms for the 1-D fractal inverse problem. In Proceedings of the Fourth International Conference on Genetic Algorithms; Morgan Kaufmann: Burlington, MA, USA, 1991; pp. 495–501. [Google Scholar]
- Wadstromer, N. An automatization of Barnsley’s algorithm for the inverse problem of iterated function systems. IEEE Trans. Image Process. 2003, 12, 1388–1397. [Google Scholar] [CrossRef]
- Gálvez, A.; Fister, I.; Iglesias, A. Image reconstruction of colored bitmap fractal images through bat algorithm and color-based image clustering. In 16th International Conference on Soft Computing Models in Industrial and Environmental Applications, SOCO 2021, Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2021; Volume 1401, pp. 222–232. [Google Scholar]
- Gálvez, A.; Fister, I.; Deb, S.; Fister, I., Jr.; Iglesias, A. Cuckoo search algorithm and K-means for IFS reconstruction of fractal colored images. In Proceedings of the 8th International Conference on Soft Computing & Machine Intelligence, ISCMI-2021, Cario, Egypt, 26–27 November 2021; pp. 91–95. [Google Scholar]
- Elton, J.H. An ergodic theorem for iterated maps. Ergod. Theory Dynam. Syst. 1987, 7, 481–488. [Google Scholar] [CrossRef]
- Gutiérrez, J.M.; Iglesias, A.; Rodríguez, M.A. A multifractal analysis of IFSP invariant measures with application to fractal image generation. Fractals 1996, 4, 17–27. [Google Scholar] [CrossRef]
- Graf, S. Barnsley’s scheme for the fractal encoding of images. J. Complex. 1992, 8, 72–78. [Google Scholar] [CrossRef]
- Haykin, S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Prentice Hall: Hoboken, NJ, USA, 1998. [Google Scholar]
- Castillo, E. Functional networks. Neural Process. Lett. 1998, 7, 151–159. [Google Scholar] [CrossRef]
- Castillo, E.; Iglesias, A.; Ruiz-Cobo, R. Functional Equations in Applied Sciences; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Gálvez, A.; Iglesias, A.; Cobo, A.; Puig-Pey, J.; Espinola, J. Bézier curve and surface fitting of 3D point clouds through genetic algorithms, functional networks and least-squares approximation. Lect. Notes Comput. Sci. 2007, 4706, 680–693. [Google Scholar]
- Iglesias, A.; Gálvez, A. Hybrid functional-neural approach for surface reconstruction. Math. Probl. Eng. 2014, 2014, 13p. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D., Jr.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Yang, X.S. Firefly algorithms for multimodal optimization. Lect. Notes Comput. Sci. 2009, 5792, 169–178. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| iter | iter | iter | ||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 124,490 | 0.654194 | 400 | 73,862 | 0.794828 | 800 | 76,166 | 0.788108 |
| 20 | 98,949 | 0.725142 | 420 | 73,462 | 0.795939 | 820 | 75,293 | 0.790853 |
| 40 | 91,295 | 0.746403 | 440 | 77,395 | 0.785014 | 840 | 73,471 | 0.795914 |
| 60 | 87,760 | 0.756222 | 460 | 75,033 | 0.791575 | 860 | 71,392 | 0.801689 |
| 80 | 85,995 | 0.761125 | 480 | 74,333 | 0.793519 | 880 | 70,191 | 0.805025 |
| 100 | 82,018 | 0.772172 | 500 | 74,090 | 0.794194 | 900 | 69,386 | 0.807261 |
| 120 | 79,734 | 0.778517 | 520 | 73,809 | 0.794975 | 920 | 69,748 | 0.806256 |
| 140 | 79,378 | 0.779506 | 540 | 73,675 | 0.795347 | 940 | 68,745 | 0.809042 |
| 160 | 78,553 | 0.781797 | 560 | 73,255 | 0.796514 | 960 | 67,943 | 0.811269 |
| 180 | 78,114 | 0.780239 | 580 | 72,105 | 0.792569 | 980 | 67,748 | 0.811811 |
| 200 | 77,582 | 0.784494 | 600 | 72,627 | 0.799708 | 1000 | 66,850 | 0.814306 |
| 220 | 75,410 | 0.790528 | 620 | 72,599 | 0.798258 | 1020 | 65,969 | 0.816753 |
| 240 | 74,693 | 0.792519 | 640 | 73,439 | 0.798336 | 1040 | 65,295 | 0.818625 |
| 260 | 73,954 | 0.794572 | 660 | 73,558 | 0.796003 | 1060 | 65,869 | 0.817031 |
| 280 | 73,626 | 0.795483 | 680 | 72,219 | 0.795672 | 1080 | 64,776 | 0.820067 |
| 300 | 73,551 | 0.795692 | 700 | 72,841 | 0.799392 | 1100 | 63,046 | 0.824872 |
| 320 | 72,172 | 0.799522 | 720 | 72,214 | 0.797664 | 1120 | 62,897 | 0.825286 |
| 340 | 73,999 | 0.794447 | 740 | 74,251 | 0.799406 | 1140 | 61,036 | 0.830456 |
| 360 | 74,667 | 0.792592 | 760 | 77,714 | 0.793747 | 1160 | 59,856 | 0.833733 |
| 380 | 74,256 | 0.793733 | 780 | 76,281 | 0.784128 | 1180 | 57,551 | 0.840136 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gálvez, A.; Fister, I.; Iglesias, A.; Fister, I., Jr.; Gómez-Jauregui, V.; Manchado, C.; Otero, C. IFS-Based Image Reconstruction of Binary Images with Functional Networks. Mathematics 2022, 10, 1107. https://doi.org/10.3390/math10071107
Gálvez A, Fister I, Iglesias A, Fister I Jr., Gómez-Jauregui V, Manchado C, Otero C. IFS-Based Image Reconstruction of Binary Images with Functional Networks. Mathematics. 2022; 10(7):1107. https://doi.org/10.3390/math10071107
Chicago/Turabian StyleGálvez, Akemi, Iztok Fister, Andrés Iglesias, Iztok Fister, Jr., Valentín Gómez-Jauregui, Cristina Manchado, and César Otero. 2022. "IFS-Based Image Reconstruction of Binary Images with Functional Networks" Mathematics 10, no. 7: 1107. https://doi.org/10.3390/math10071107
APA StyleGálvez, A., Fister, I., Iglesias, A., Fister, I., Jr., Gómez-Jauregui, V., Manchado, C., & Otero, C. (2022). IFS-Based Image Reconstruction of Binary Images with Functional Networks. Mathematics, 10(7), 1107. https://doi.org/10.3390/math10071107