
Construction of Cubic Trigonometric Curves with an Application of Curve Modelling





Abstract
:1. Introduction
- To work on cubic TBF using trigonometric Bézier basis functions with some appropriate choice of SP .
- To demonstrate how the form parameter affects TBS basic functions and TBS curves.
- To derive different properties of CTBS along with their continuities in both polynomial and rational form.
- To construct different objects using CTBS and their applications in practical life.
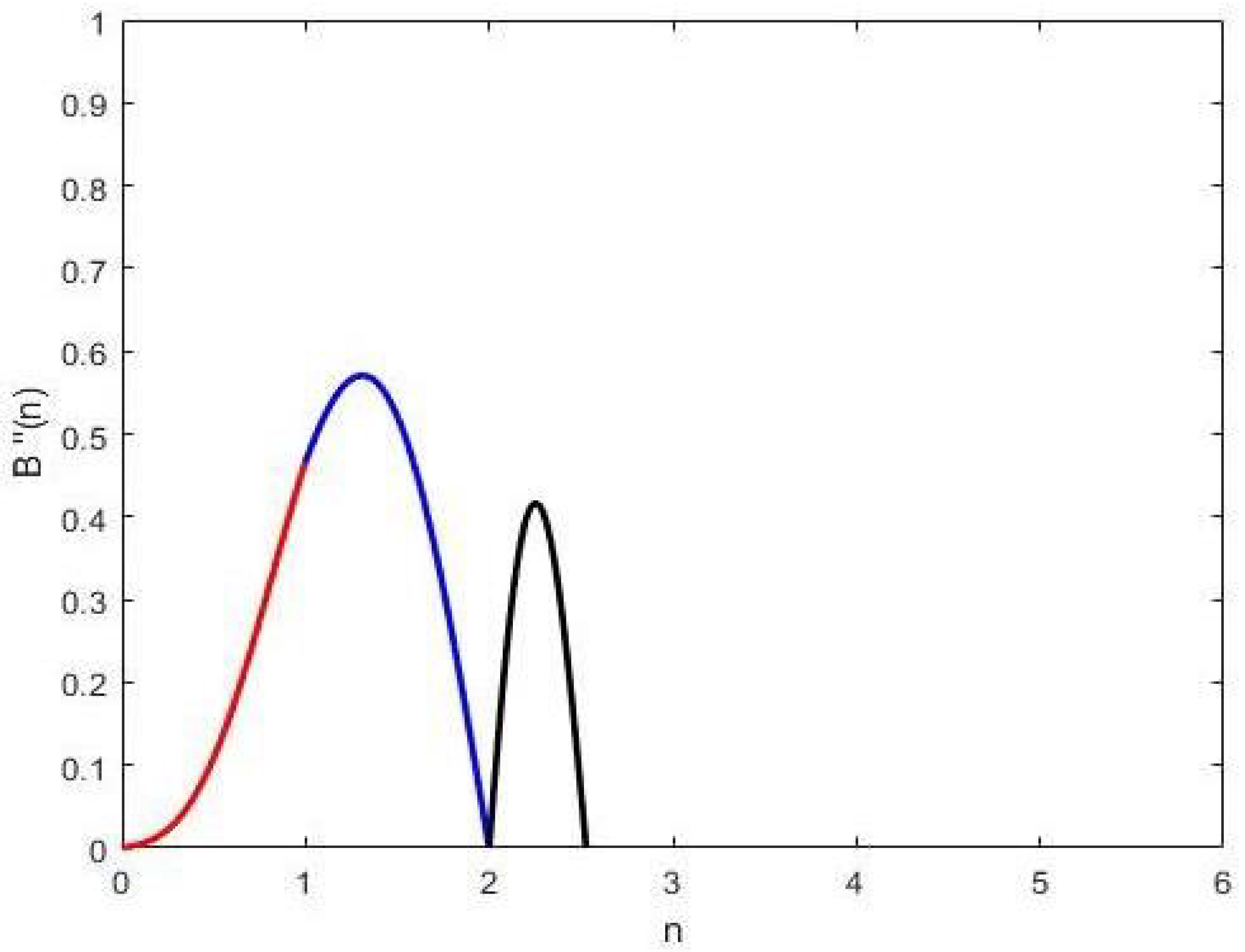
2. Cubic Trigonometric B-Spline Basis Functions
Properties of the Basis Functions
3. Cubic Trigonometric B-Spline Curve
3.1. Properties of Cubic Trigonometric B-Spline Curve
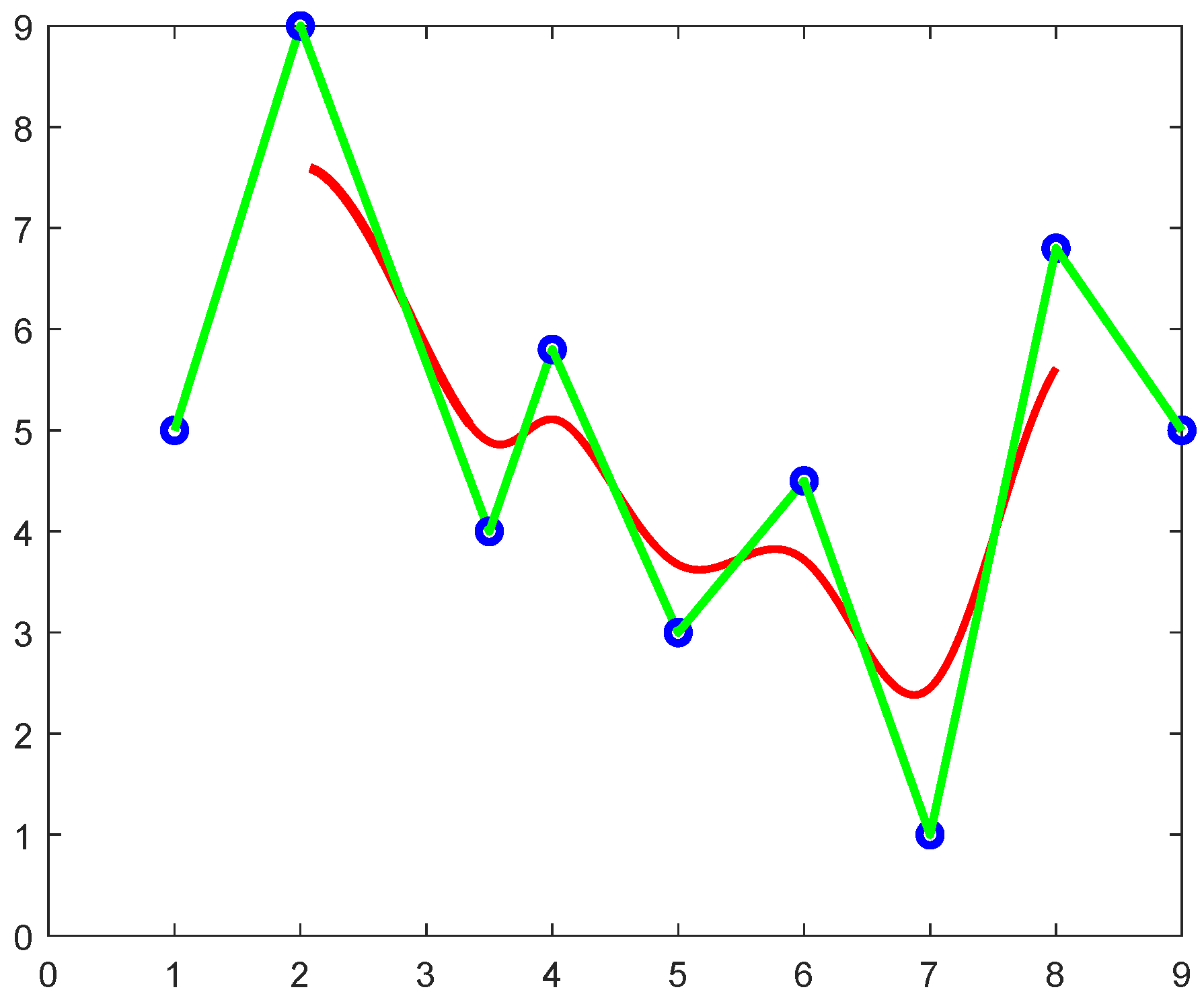
- Local Control: The cubic TBS curve has the property of local control i.e., in B-spline curve only that segment will be changed where that particular control point is located. Figure 7 shows that the cubic TBS curve does not pass though the extreme points.
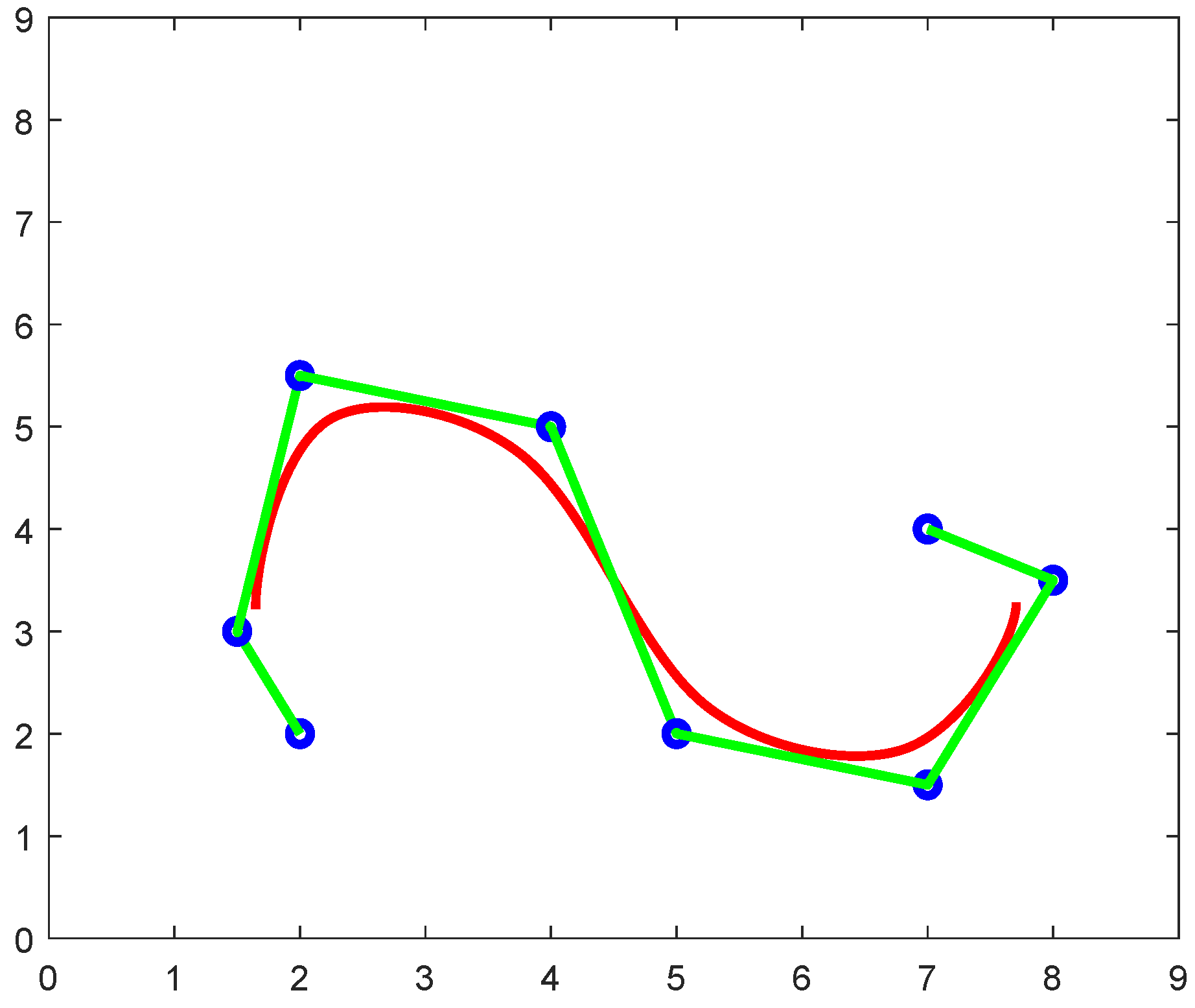
- Convex Hull Property: This property shows that all the points of the cubic TBS curve always lie inside the convex hull of its control polygon, i.e., for CHP is shown below in Figure 8.
- Invariance under affine transformation: Let T be an affine transformation, such as rotation, scaling, transformation and reflection. This implies
- Continuity of Trigonometric B-spline Curve: The TBS curve has continuity for UK. Let k be the multiplicity of the knot vectors , and then the curve has continuity. Whereas the continuity at implies that the curve is discontinuous.In the knot interval , the derivatives are evaluated as follows.Derivatives at knotSimilarly,Derivatives at knot
3.2. Validity of Proposed Scheme
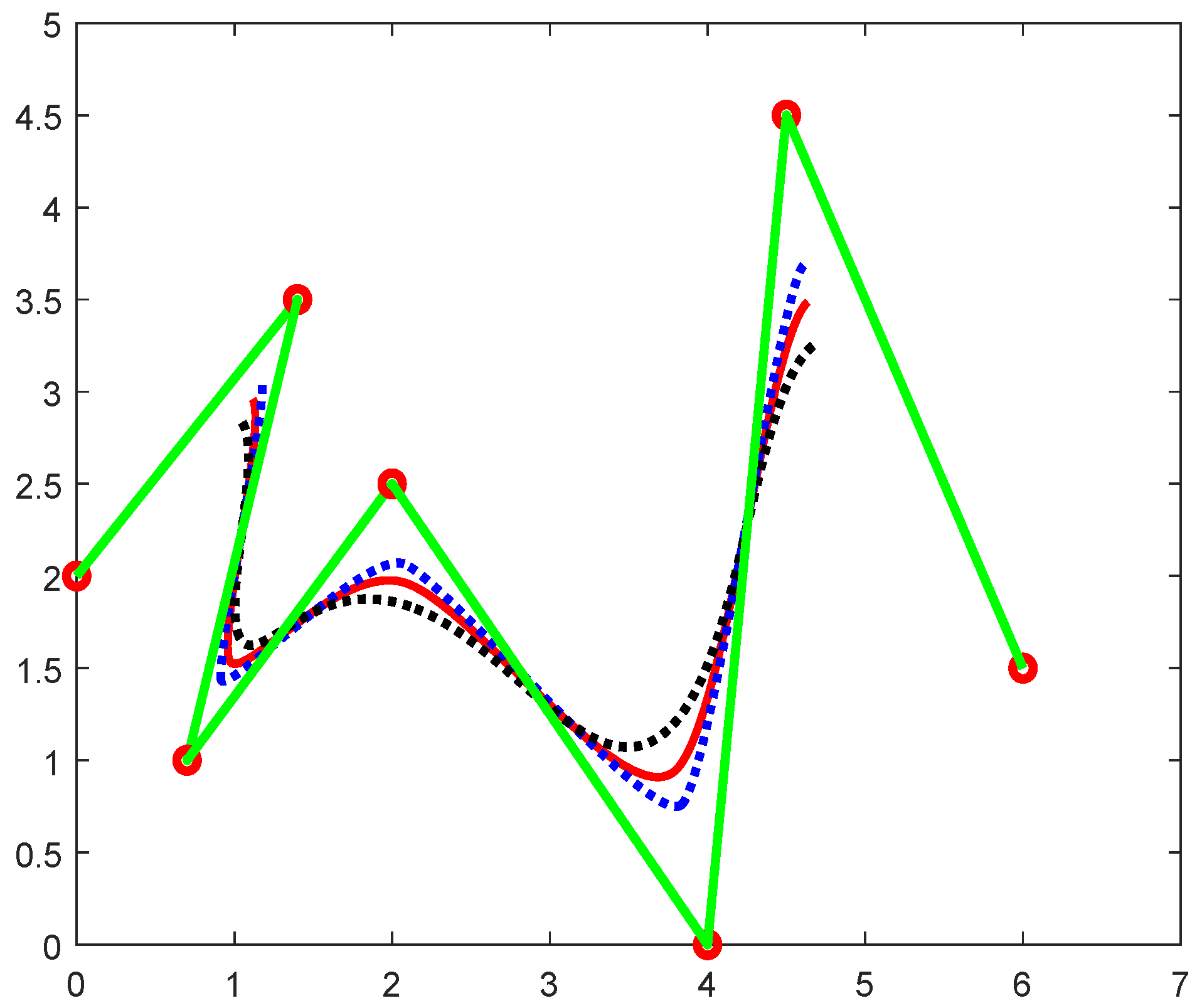
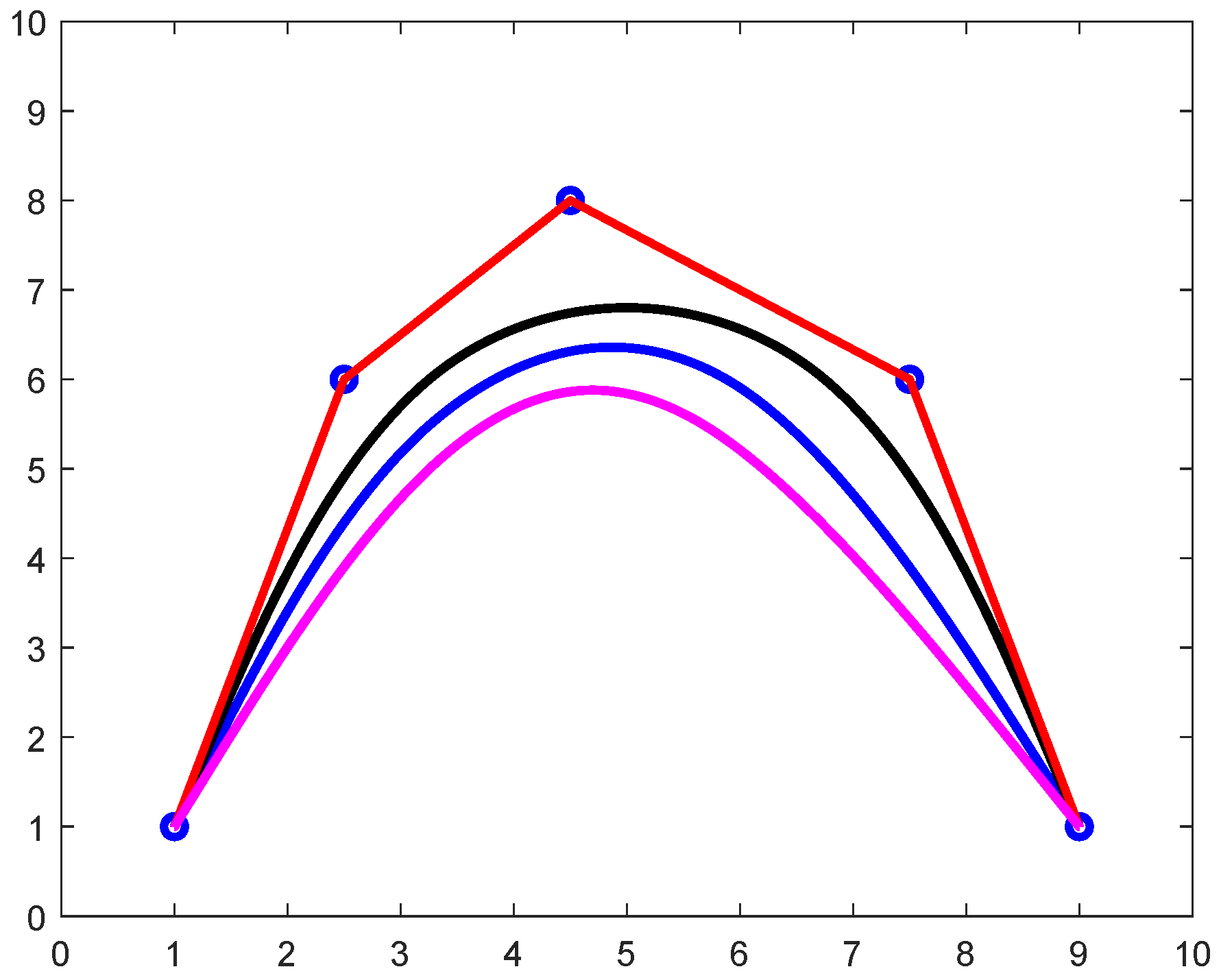
- Open Trigonometric B-spline Curve: The given TBS basis functions are verified by constructing an open B-spline curve by using the SP and the knot vectors . In Figure 9, by taking SP , an open curve was constructed, and thus it also lies in the convex hull of its defining control polygon.The effect of SP is shown in Figure 10 by using different colours. These coloured curves were designed by taking different values of SP, and black is used for , red for and blue for .
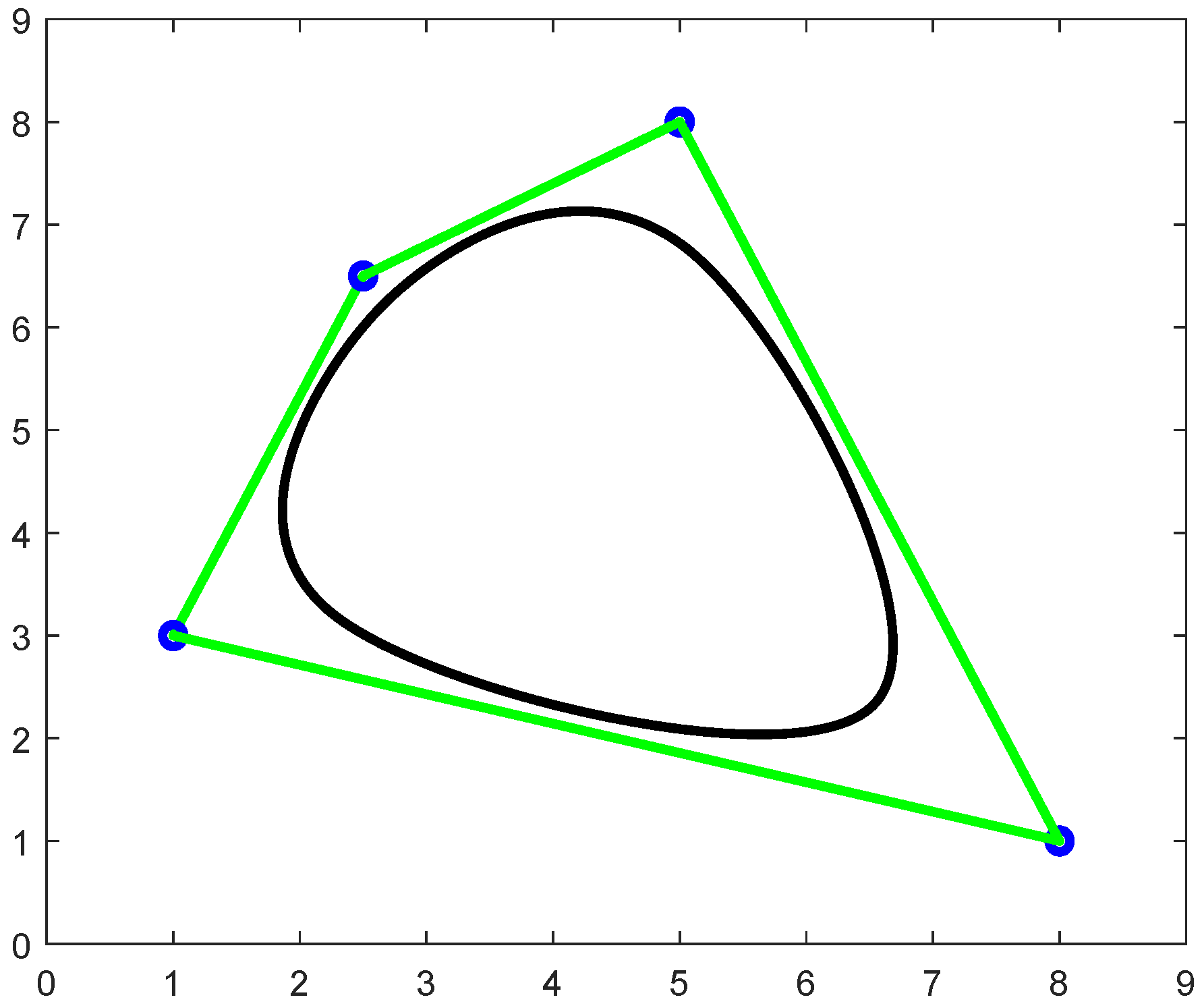
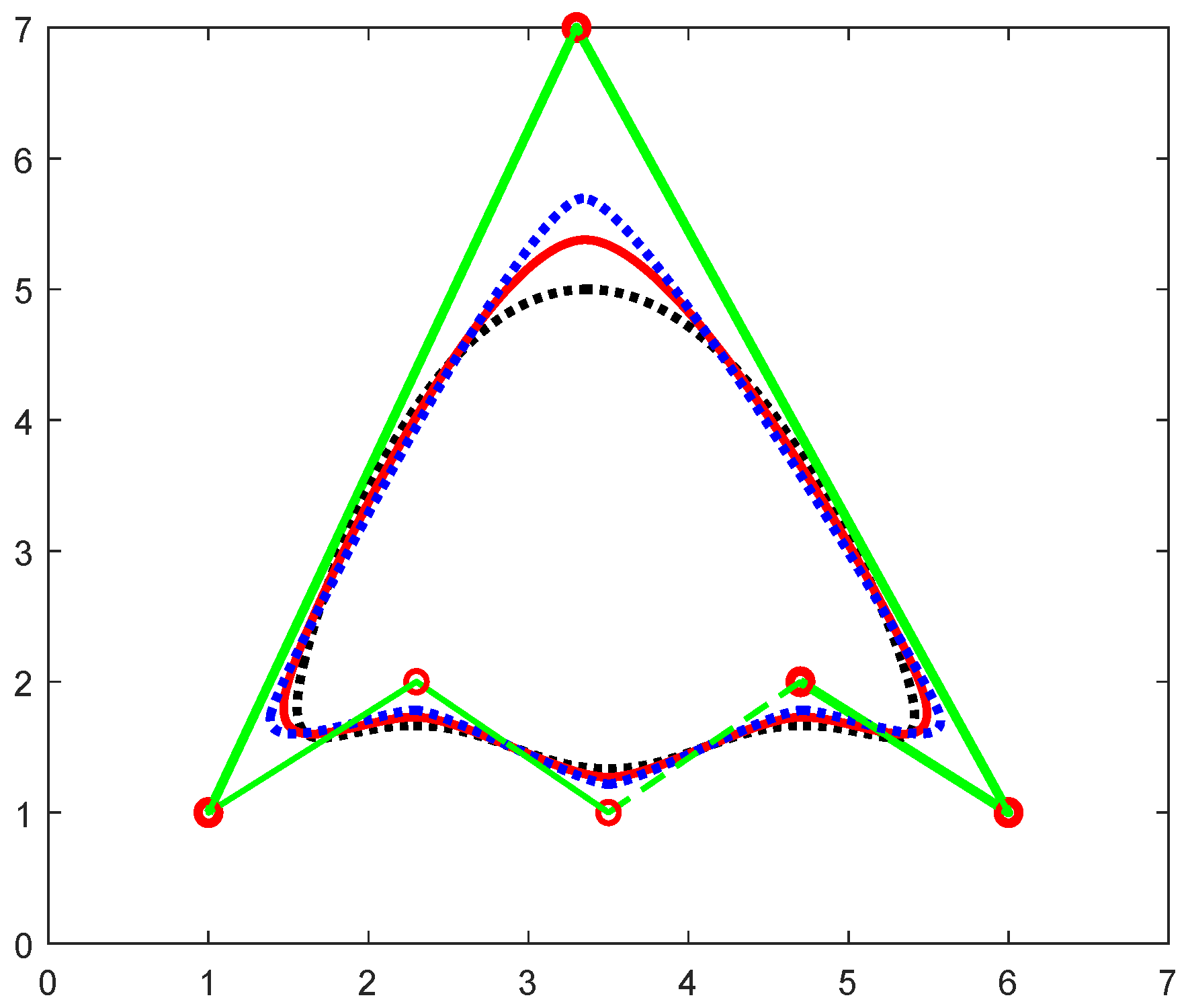
- Closed Trigonometric B-spline Curve: In Figure 11, a closed curve was constructed by using the knot vectors in the interval and specified by using the shape parameter (SP) .Therefore, the proposed basis function is applicable for both open and closed cubic TBS curves, and the effect of SP by taking various values of is shown in Figure 12 with blue used for , red for and black for .Therefore, it is proven that, by increasing the value of , we obtain more refined forms of curves, which are closer to the control polygon.
4. Cubic Trigonometric Rational B-Spline Basis Functions
Properties of Rational Trigonometric Cubic B-Spline Basis Functions
5. Rational Trigonometric Cubic B-Spline Curve
5.1. Properties of Rational Trigonometric Cubic B-Spline Curve
- Convex Hull Property (CHP): Rational B-spline curve has convex hull property, i.e., every point of curve lies inside the convex hull of its defining polygon. This implies for , as shown in Figure 13;
- Local Control:Figure 14 shows that, in B-splines, the curve is always controlled by changing the weights and the control points.
- Invariance Under Affine Transformation: Let T be an affine transformation, and then
- Continuity of Cubic Rational B-spline Curve: The cubic TRBS curve has continuity at UK vector n. Consider m is the multiplicity of the knot vectors n, which is equal to the order of the cubic B-spline curve, and then the curve has continuity , and continuity implies that the curve is discontinuous.For , the continuity of the knot vectors is given asDifferentiating Equation (10) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we obtainDifferentiating Equation (11) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we obtainDifferentiating Equation (12) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we obtainDifferentiating Equation (13) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we findDifferentiating Equation (14) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we obtainDifferentiating Equation (15) w.r.t ‘n’ and then substituting in the first derivative of rational curve defined on , we obtain
5.2. Open and Close Trigonometric Rational B-Spline Curve
- Open Rational B-Spline Curve: An open TRBS curve can be constructed by using control point multiplicity as shown in Figure 15 and obtain an end point interpolated curve.
- Close Rational B-spline Curve: By using the uniform knots (UK), we can construct closed or periodic cubic trigonometric rational B-spline (TRBS) curve as shown in Figure 16. The curve in blue colour is constructed by taking . Black colour shows the value of SP as . Whereas for we use red colour. The effect of shape parameter (SP) is observed in the figure below and Table 2 shows the effect of weights.
6. Applications
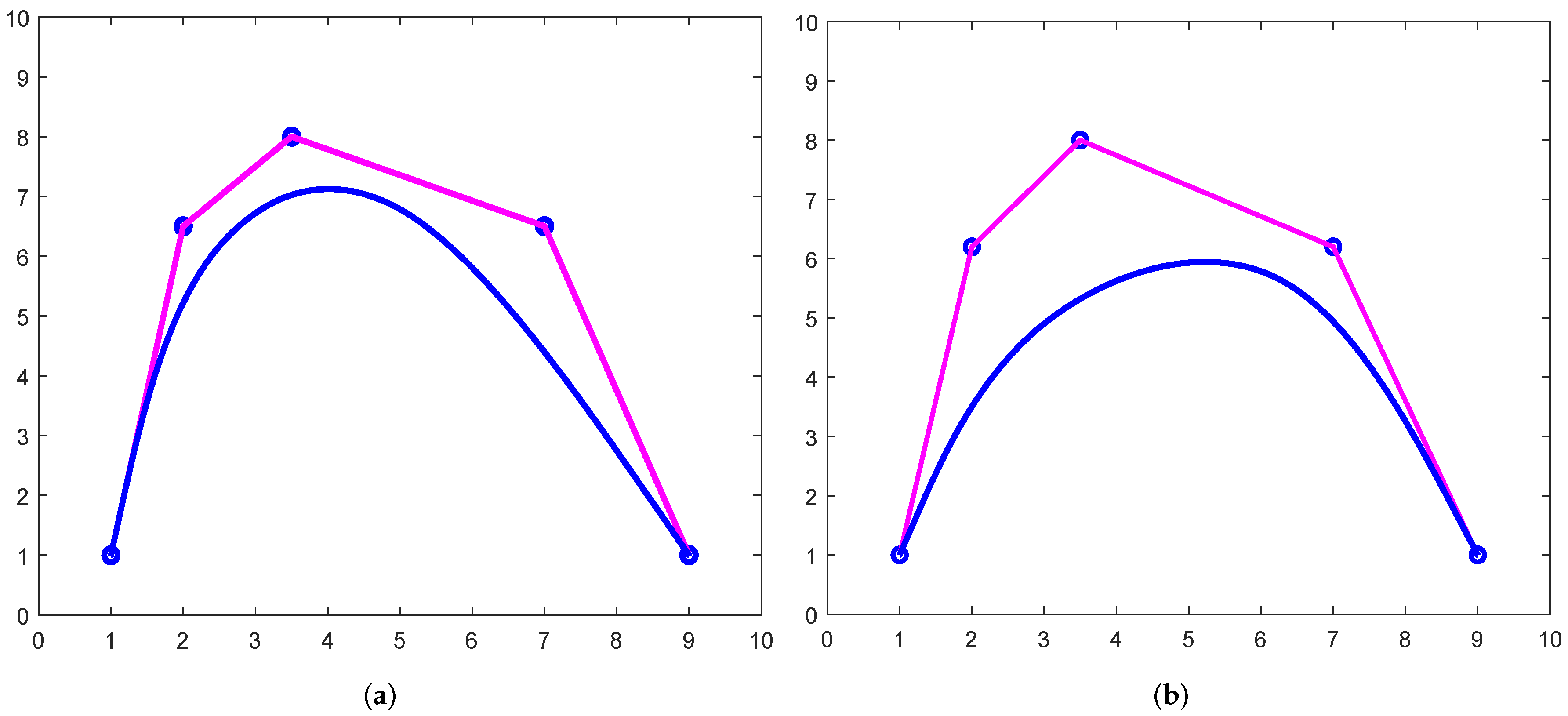
- Alphabet Designing: Twelve control points are used for the designing of an alphabet M. Thus it is seen that by change the value of SP, we obtain a more refined shape of the letter M. In Figure 17a firstly we take and then in Figure 17b we take . As we increase the value of SP we see that an alphabet become more finer.
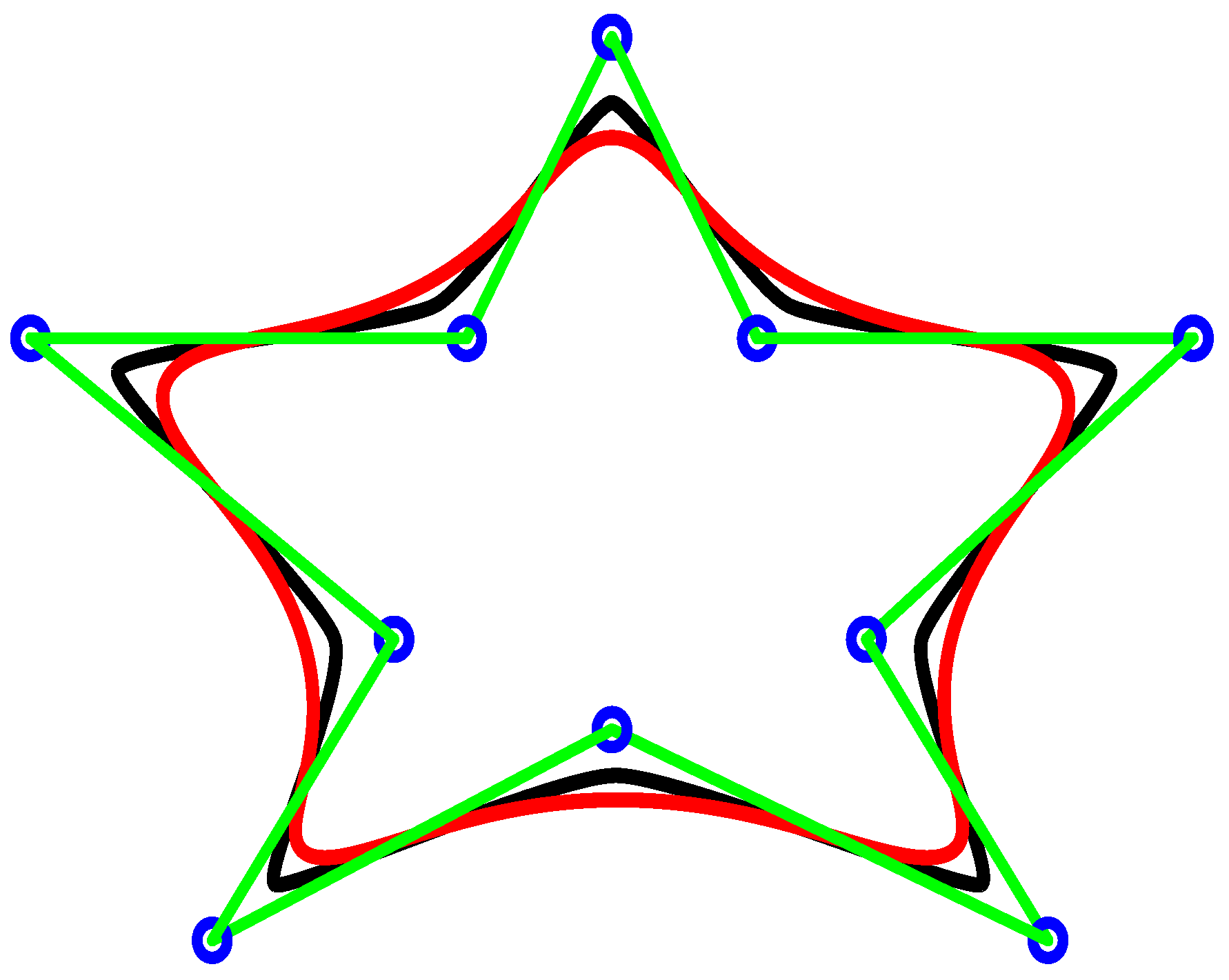
- Star Designing: The cubic trigonometric rational B-spline (TRBS) curve is used in the designing of star by taking 10 control points. In the star construction, the SP is used in black colour. Whereas in red colour indicates the effect of SP and weights as seen in Figure 18.
- Butterfly design: A butterfly was constructed by using a cubic TBS curve as shown in Figure 19. A total of 92 control points are used in the construction of butterfly. By using different values of SP, such as at , the wings of the butterfly are designed. furthermore, for the remaining part of the butterfly was designed. The adjustment in the value of SP works efficiently and gives a finer object.
- 3D cube construction: A geometrical model of a cube in a 3-dimensional manner was designed in the figure below by using cubic TRBs curve. The free parameter was used in this model. Different colour curves are used to represent the effect of control points. Thus, it was seen that all the curves lies inside its defining polygon as shown in Figure 20.
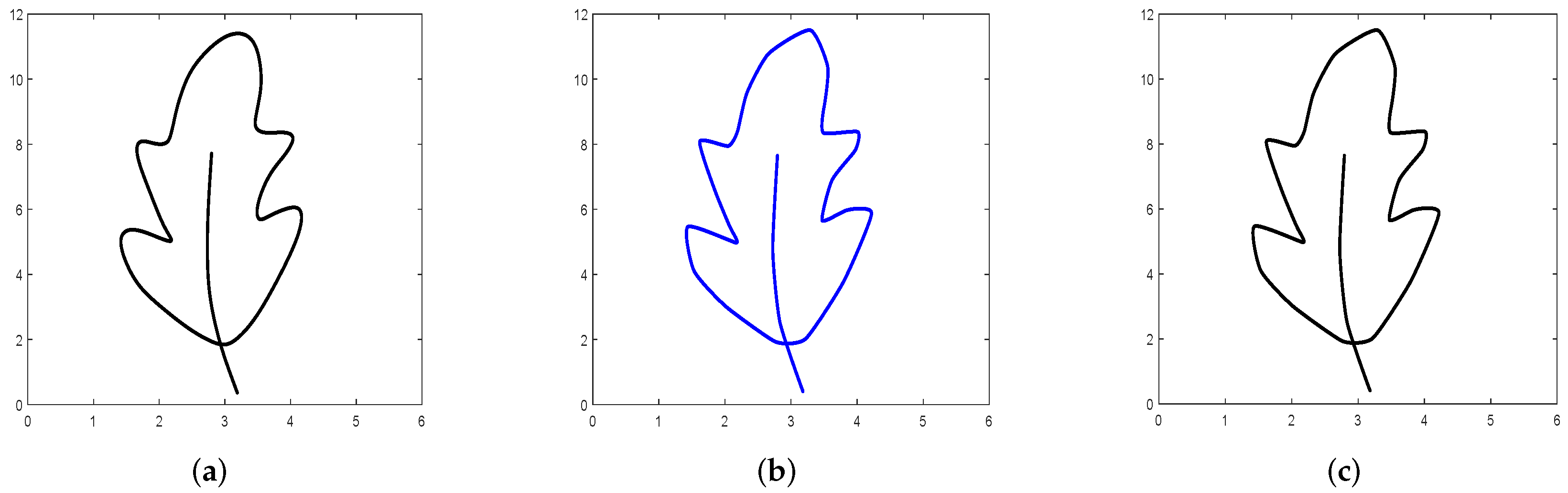
- Leaf Design: Trigonometric B-spline curve was used to create a geometrical design of a leaf. The model of leaf in Figure 21a was formed by using the value of SP . Then we take in Figure 21b to construct the geometrical design of a leaf whereas in Figure 21c we take the value of SP at .Therefore, we see that the shape of the leaf becomes finer as the value of the SP is raised.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Farin, G.E.; Josef, H.; Myung-Soo, K. Handbook of Computer Aided Geometric Design; Elsevier: Boston, MA, USA; London, UK; New York, NY, USA, 2002. [Google Scholar]
- Farin, G.E. Curves and Surfaces for Computer-Aided Geometric Design: A Practical Code; Academic Press Inc.: Cambridge, MA, USA, 1996. [Google Scholar]
- Majeed, A.; Abbas, M.; Miura, K.T.; Kamran, M.; Nazir, T. Surface modeling from 2D contours with an application to craniofacial fracture construction. Mathematics 2020, 8, 1246. [Google Scholar] [CrossRef]
- Li, F.; Hu, G.; Abbas, M.; Miura, K.T. The generalized H-Bézier model: Geometric continuity conditions and applications to curve and surface modeling. Mathematics 2020, 8, 924. [Google Scholar] [CrossRef]
- Hu, X.; Hu, G.; Abbas, M.; Misro, M.Y. Approximate multi-degree reduction of Q-Bézie curves via generalized Bernstein polynomial functions. Adv. Differ. Equ. 2020, 2020, 413. [Google Scholar] [CrossRef]
- Sánchez-Reyes, J. Harmonic rational Bézier curves, p-Bézier curves and trigonometric polynomials. Comput. Aided Geom. Des. 1998, 15, 909–923. [Google Scholar] [CrossRef]
- González, C.; Albrecht, G.; Paluszny, M.; Lentini, M. Design of C2 algebraic-trigonometric pythagorean hodograph splines with shape parameters. Comput. Appl. Math. 2018, 37, 1472–1495. [Google Scholar]
- Pelosi, F.; Farouki, R.T.; Manni, C.; Sestini, A. Geometric Hermite interpolation by spatial Pythagorean-hodograph cubics. Adv. Comput. Math. 2005, 22, 325–352. [Google Scholar] [CrossRef]
- Zhu, Y.; Han, X. New trigonometric basis possessing exponential shape parameters. J. Comput. Math. 2015, 33, 642–684. [Google Scholar]
- Levent, A.; Sahin, B. Cubic Bézier-like transition curves with new basis function. Proc. Inst. Math. Mech. Natl. Acad. Sci. Azerbaijan 2018, 44, 222–228. [Google Scholar]
- Han, X.A.; Ma, Y.; Huang, X. The cubic trigonometric Bézier curve with two shape parameters. Appl. Math. Lett. 2009, 22, 226–231. [Google Scholar] [CrossRef] [Green Version]
- Troll, E. Constrained modification of the cubic trigonometric Bézier curve with two shape parameters. Ann. Math. Inform. 2014, 43, 145–156. [Google Scholar]
- Chen, Q.; Wang, G. A class of Bézier-like curves. Comput. Aided Geom. Des. 2003, 20, 29–39. [Google Scholar] [CrossRef]
- Chen, X.; Tan, J.; Liu, Z.; Xie, J. Approximation of functions by a new family of generalized Bernstein operators. J. Math. Anal. Appl. 2017, 450, 244–261. [Google Scholar] [CrossRef]
- Oruç, H.; Phillips, G.M. q-Bernstein polynomials and Bézier curves. J. Comput. Appl. Math. 2003, 151, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Ait-Haddou, R.; Barton, M. Constrained multi-degree reduction with respect to Jacobi norms. Comput. Aided Geom. Des. 2016, 42, 23–30. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, H.M.; Ansari, K.J.; Ozger, F.; OdemisOzger, Z. A link between approximation theory and summability methods via four-dimensional infinite matrices. Mathematics 2021, 9, 1895. [Google Scholar] [CrossRef]
- Schoenberg, I.J. On trigonometric spline interpolation. J. Math. Mech. 1964, 13, 795–825. [Google Scholar]
- Troll, E.M.; Hoffmann, M. Geometric properties and constrained modification of trigonometric spline curves of Han. Ann. Math. Inform. 2010, 37, 165–175. [Google Scholar]
- Dung, V.T.; Tjahjowidodo, T. A direct method to solve optimal knots of B-spline curves: An application for non-uniform B-spline curves fitting. PLoS ONE 2017, 12, e0173857. [Google Scholar] [CrossRef]
- Han, X. Quadratic trigonometric polynomial curves with a shape parameter. Comput. Aided Geom. Des. 2002, 19, 503–512. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer: New York, NY, USA, 1995. [Google Scholar]
- Marsh, D. Applied Geometry for Computer Graphics and CAD; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Choubey, N.; Ojha, A. Trigonometric splines with variable shape parameter. Rocky Mt. J. Math. 2008, 38, 91–105. [Google Scholar] [CrossRef]
- Han, X. Cubic trigonometric polynomial curves with a shape parameter. Comput. Aided Geom. Des. 2004, 21, 535–548. [Google Scholar] [CrossRef]
- Yan, L. Cubic trigonometric nonuniform spline curves and surfaces. Math. Probl. Eng. 2016, 2016, 7067408. [Google Scholar] [CrossRef] [Green Version]
- Yan, L.; Liang, J. A class of algebraic–trigonometric blended splines. J. Comput. Appl. Math. 2011, 235, 1713–1729. [Google Scholar] [CrossRef]
- Hu, G.; Qin, X.; Ji, X.; Wei, G.; Zhang, S. The construction of μ-B-spline curves and its application to rotational surfaces. Appl. Math. Comput. 2015, 266, 194–211. [Google Scholar] [CrossRef]
- Majeed, A.; Qayyum, F. New rational cubic trigonometric B-spline curves with two shape parameters. Comput. Appl. Math. 2020, 39, 198. [Google Scholar] [CrossRef]
- Pagani, L.; Scott, P.J. Curvature based sampling of curves and surfaces. Comput. Aided Geom. Des. 2018, 59, 32–48. [Google Scholar] [CrossRef]
- Walz, G. Identities for trigonometric B-splines with an application to curve design. BIT Numer. Math. 1997, 37, 189–201. [Google Scholar] [CrossRef]
- Majeed, A.; Mt Piah, A.R.; Gobithaasan, R.U.; Yahya, Z.R. Craniofacial reconstruction using rational cubic ball curves. PLoS ONE 2015, 10, e0122854. [Google Scholar] [CrossRef]
- Majeed, A.; Rafique, M.; Abdullah, J.Y.; Rajion, Z.A. NURBS curves with the application of multiple bones fracture reconstruction. Appl. Math. Comput. 2017, 315, 70–84. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr No. | Curves | |
|---|---|---|
| 1 | red | |
| 2 | black | |
| 3 | magenta | |
| 4 | blue |
| value of | 9 | 19 | 17 |
| value of | 7 | 10 | 5 |
| value of | 8 | 18 | 12 |
| value of | 7 | 27 | 47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majeed, A.; Naureen, M.; Abbas, M.; Miura, K.T. Construction of Cubic Trigonometric Curves with an Application of Curve Modelling. Mathematics 2022, 10, 1087. https://doi.org/10.3390/math10071087
Majeed A, Naureen M, Abbas M, Miura KT. Construction of Cubic Trigonometric Curves with an Application of Curve Modelling. Mathematics. 2022; 10(7):1087. https://doi.org/10.3390/math10071087
Chicago/Turabian StyleMajeed, Abdul, Mehwish Naureen, Muhammad Abbas, and Kenjiro T. Miura. 2022. "Construction of Cubic Trigonometric Curves with an Application of Curve Modelling" Mathematics 10, no. 7: 1087. https://doi.org/10.3390/math10071087
APA StyleMajeed, A., Naureen, M., Abbas, M., & Miura, K. T. (2022). Construction of Cubic Trigonometric Curves with an Application of Curve Modelling. Mathematics, 10(7), 1087. https://doi.org/10.3390/math10071087