
Evaluation of sEMG Signal Features and Segmentation Parameters for Limb Movement Prediction Using a Feedforward Neural Network


Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Acquisition
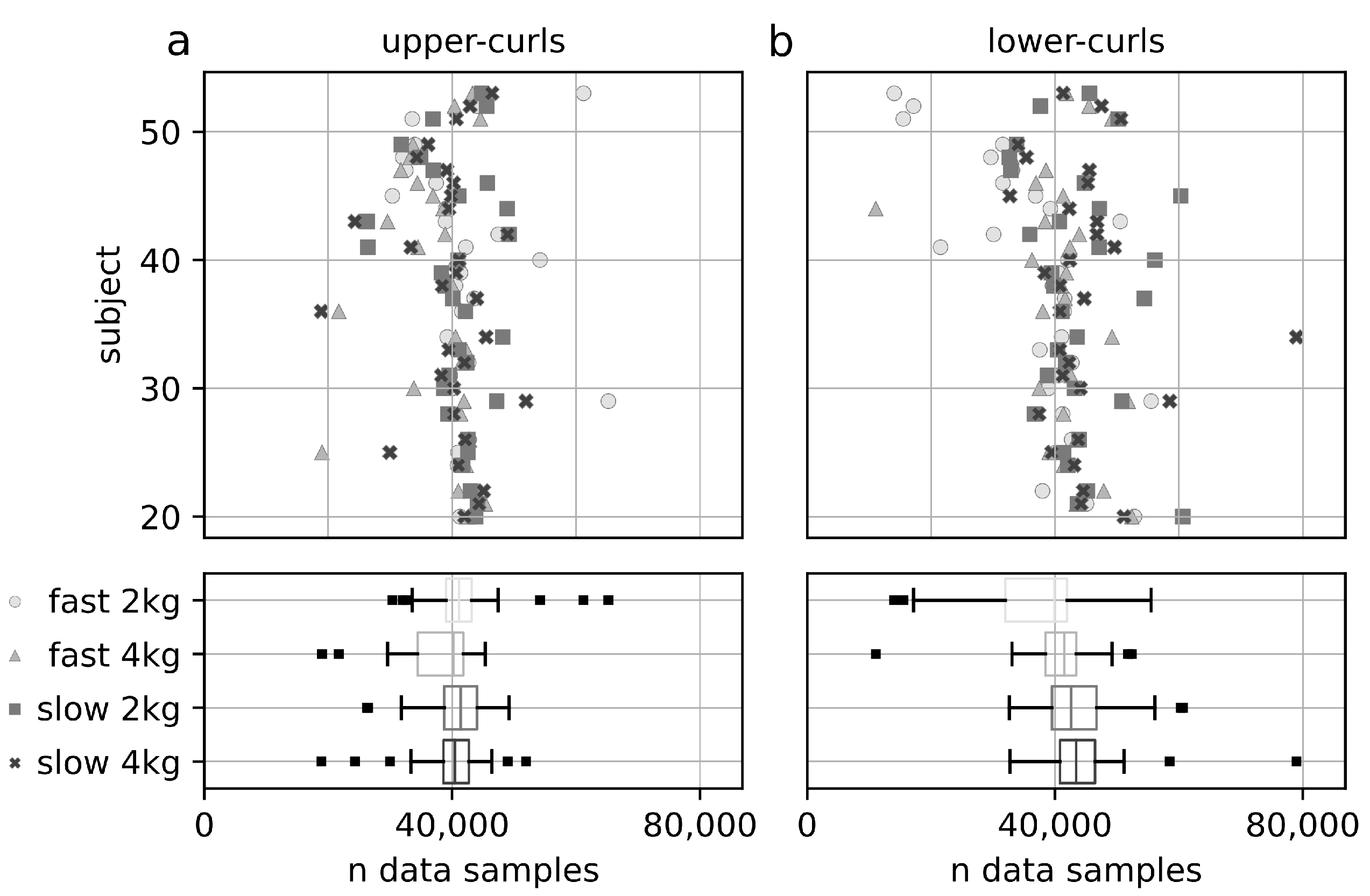
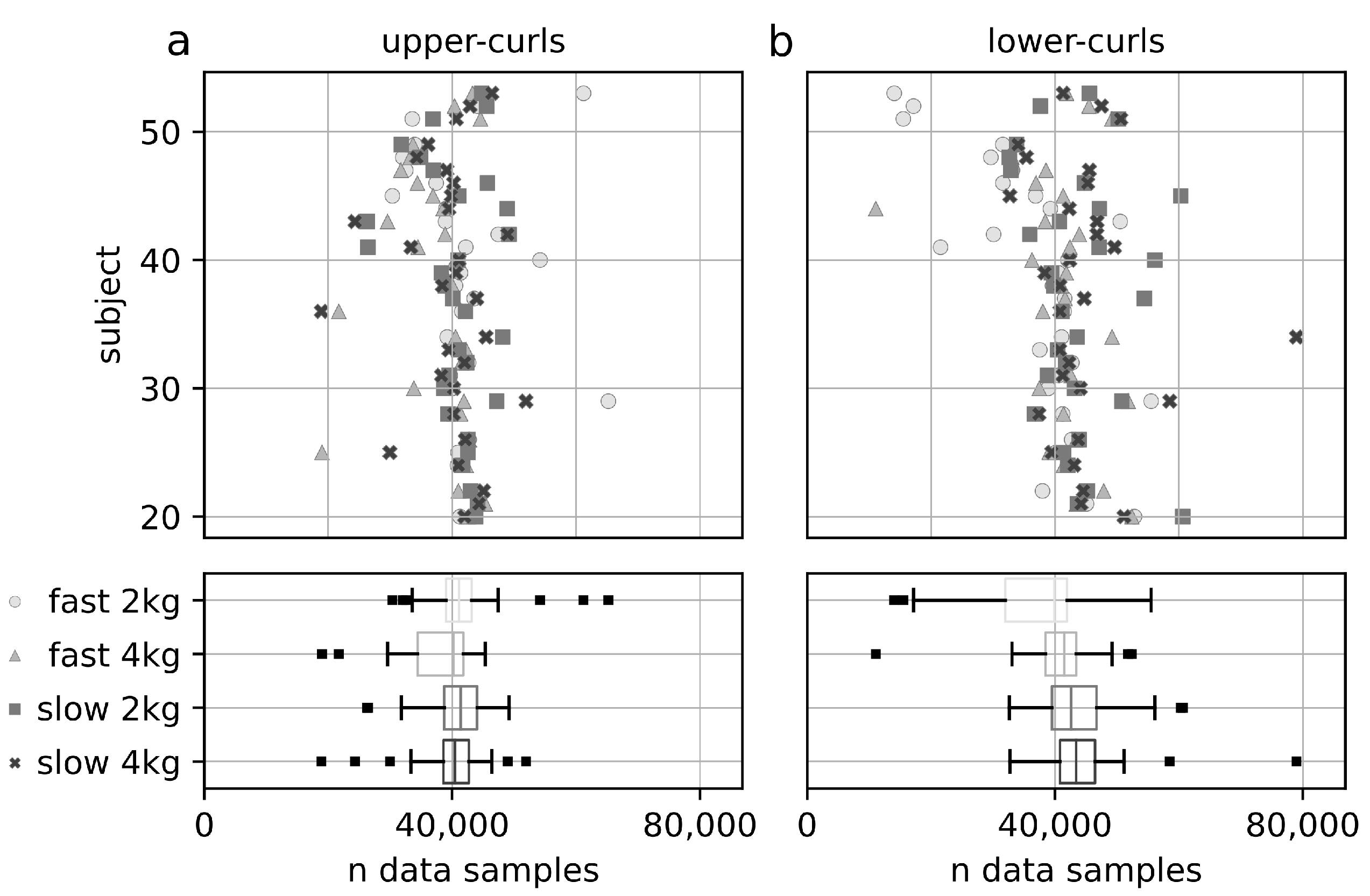
2.1.1. Subjects and Exercises
2.1.2. Recording of sEMG Data
2.1.3. Measurement of the Elbow-Joint Angle
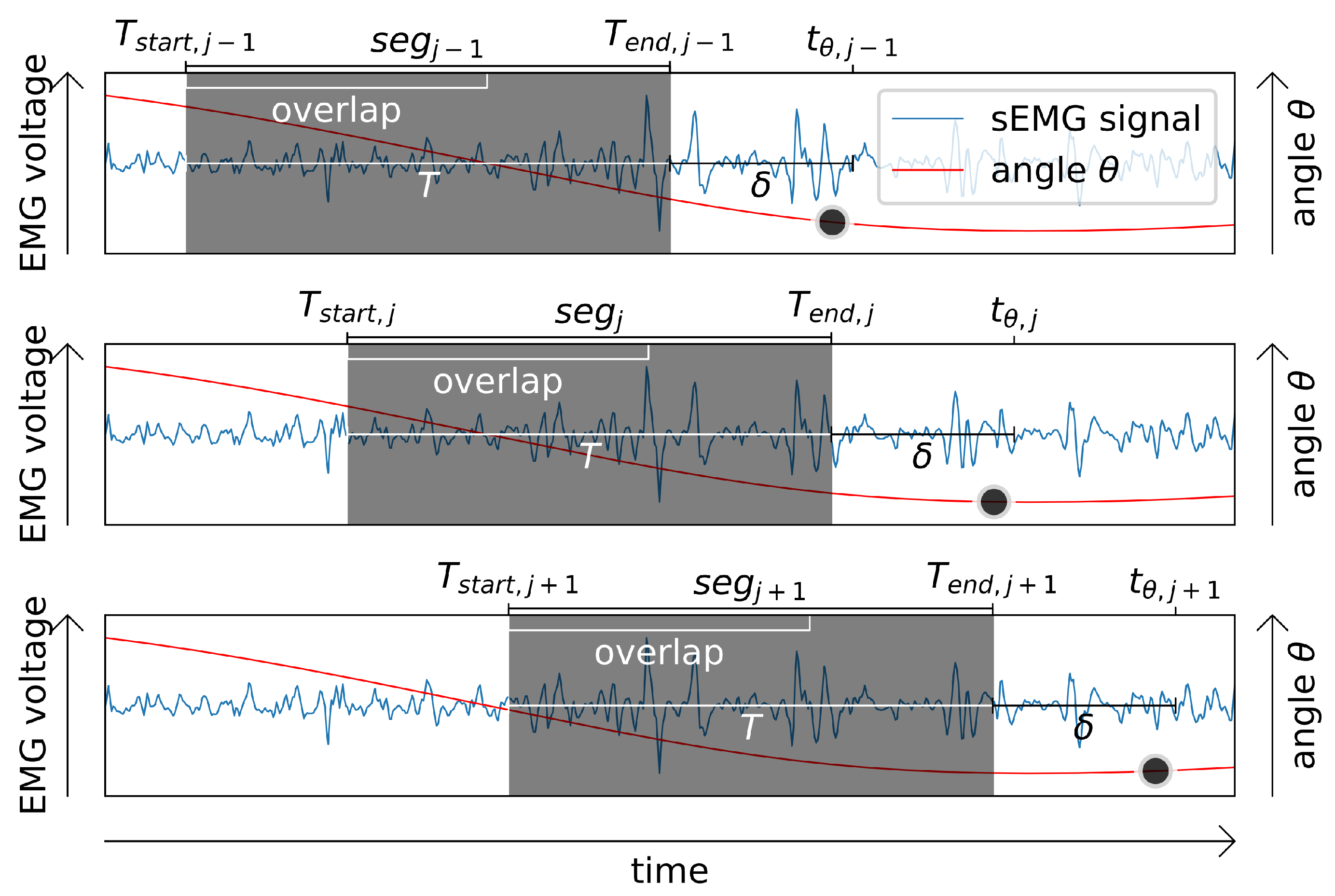
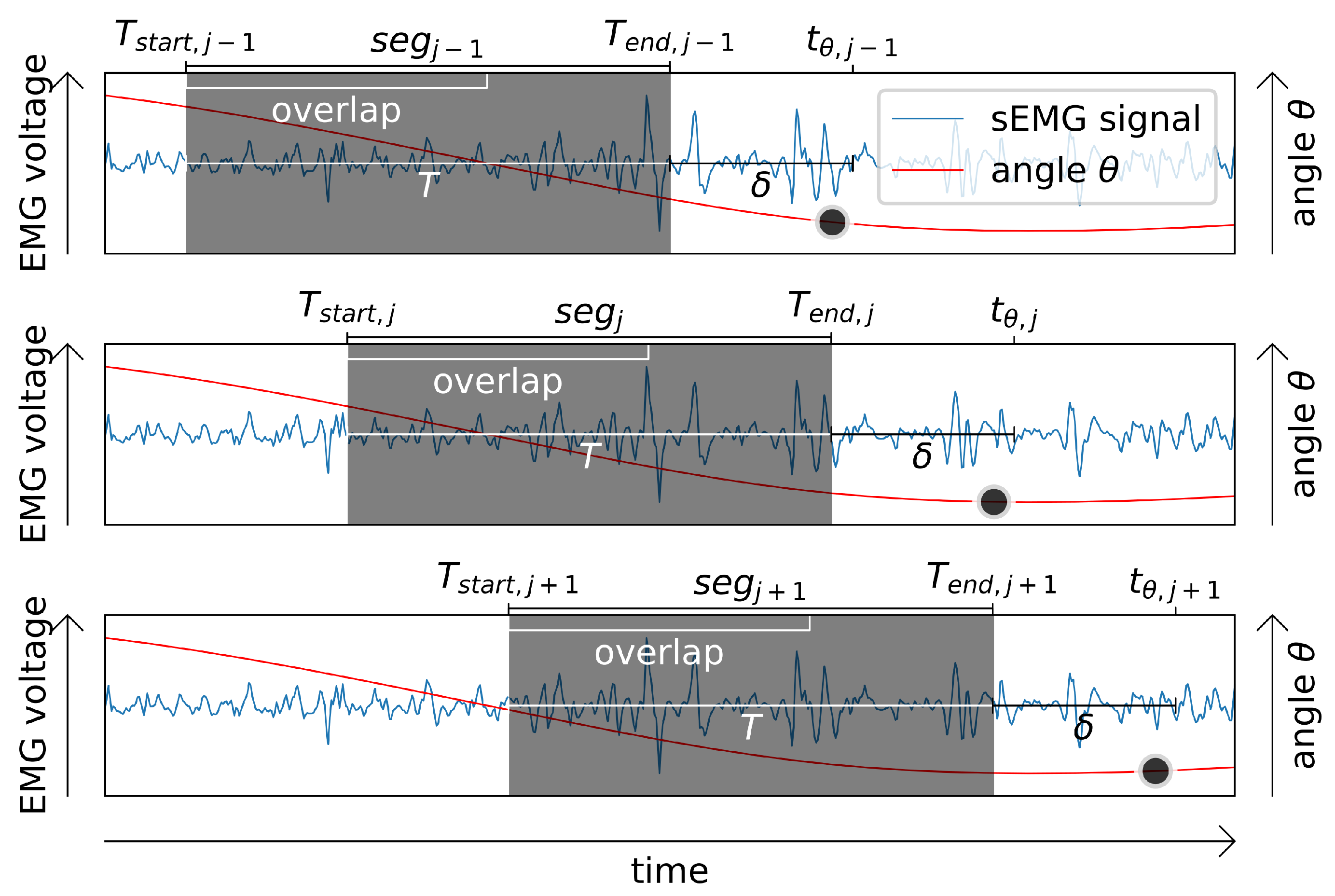
2.2. Segmentation of sEMG Data in the Time Domain
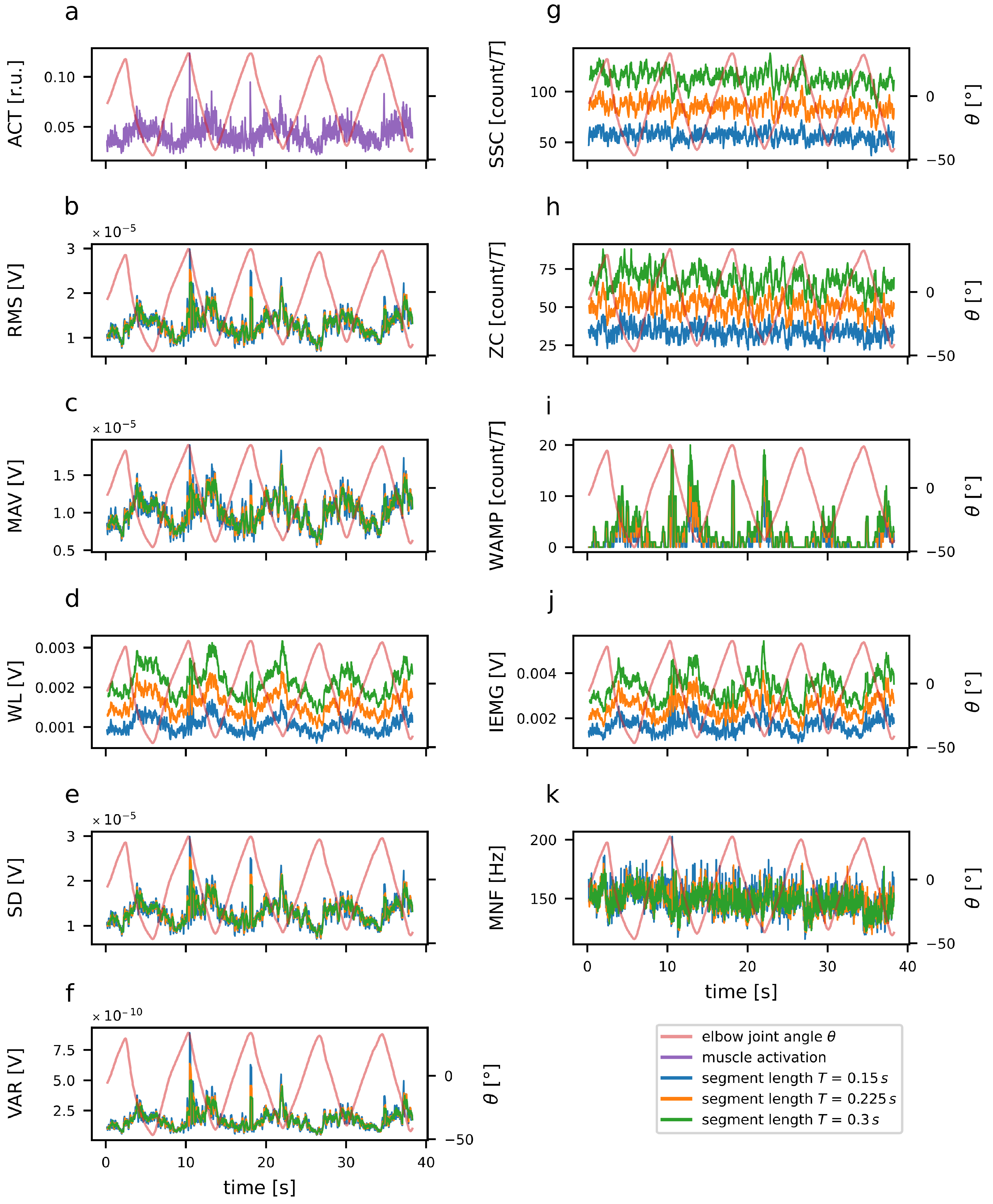
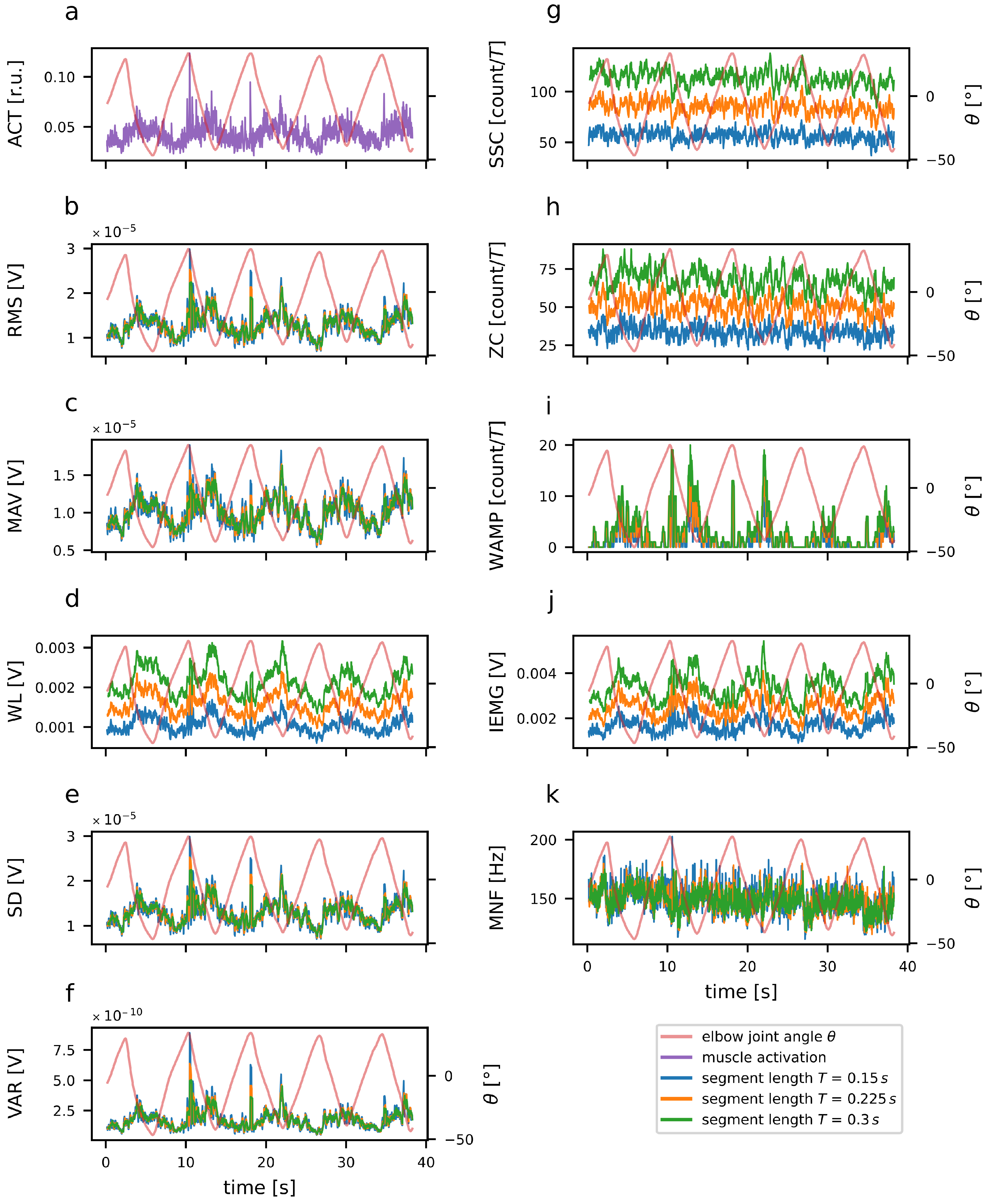
2.3. Signal Features for EMG-Based Movement Prediction
2.3.1. Muscle Activation Dynamics
2.3.2. Features with Low-Pass Filter Character
2.3.3. Event-Based Features
2.3.4. Integral-Based Features
2.3.5. Frequency Domain Features
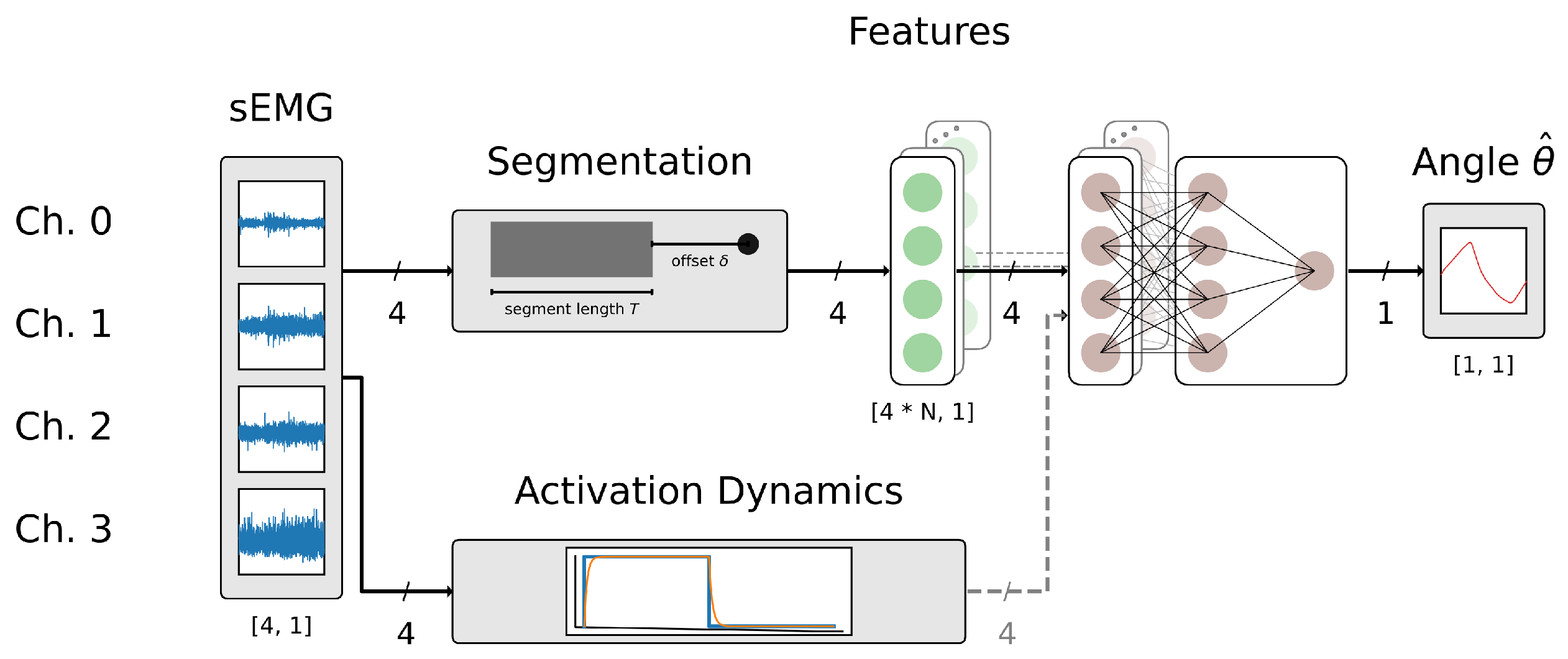
2.4. Feedforward Neural Network
2.5. Comparative Rating Metric
3. Results
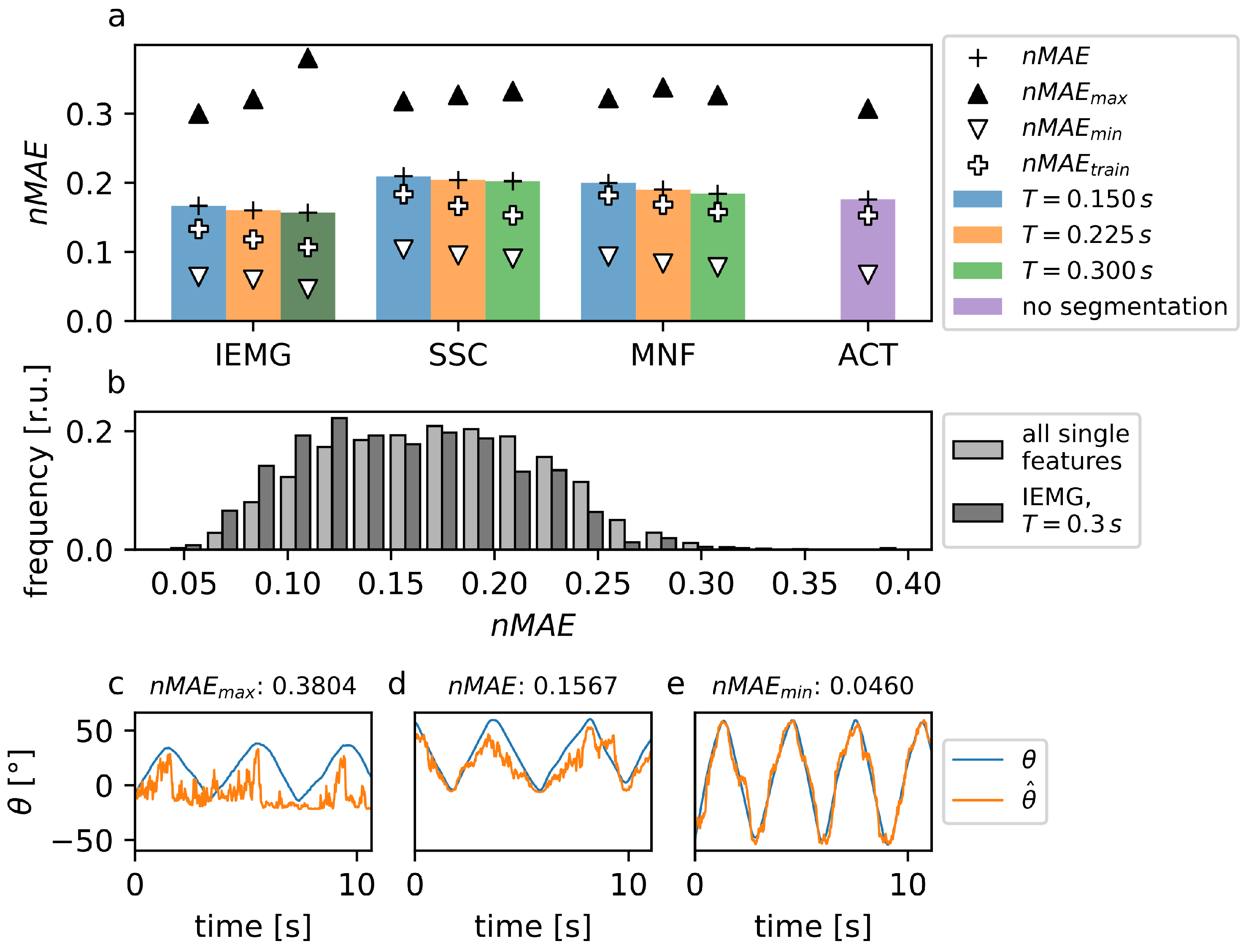
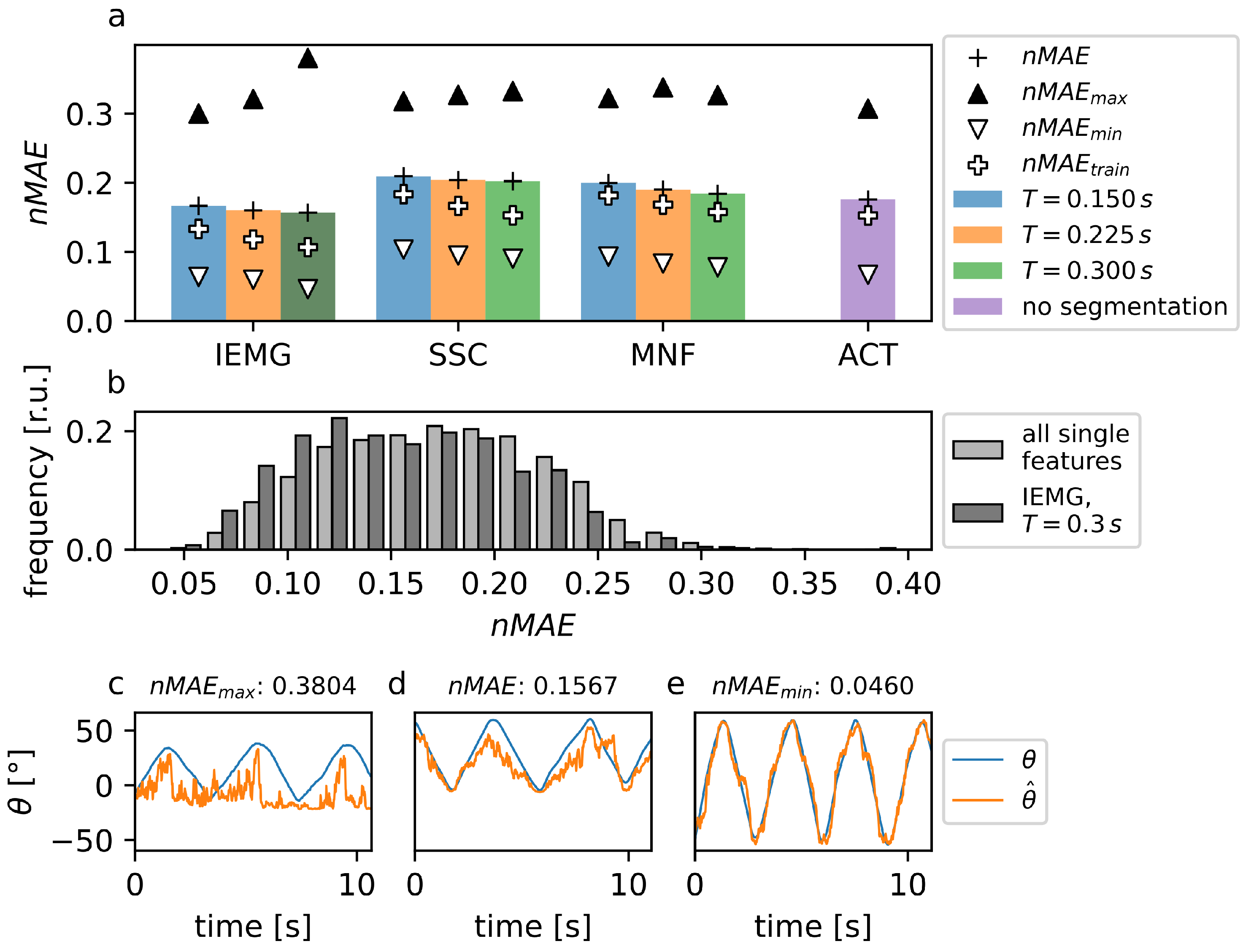
3.1. Single Features
3.2. Segmentation
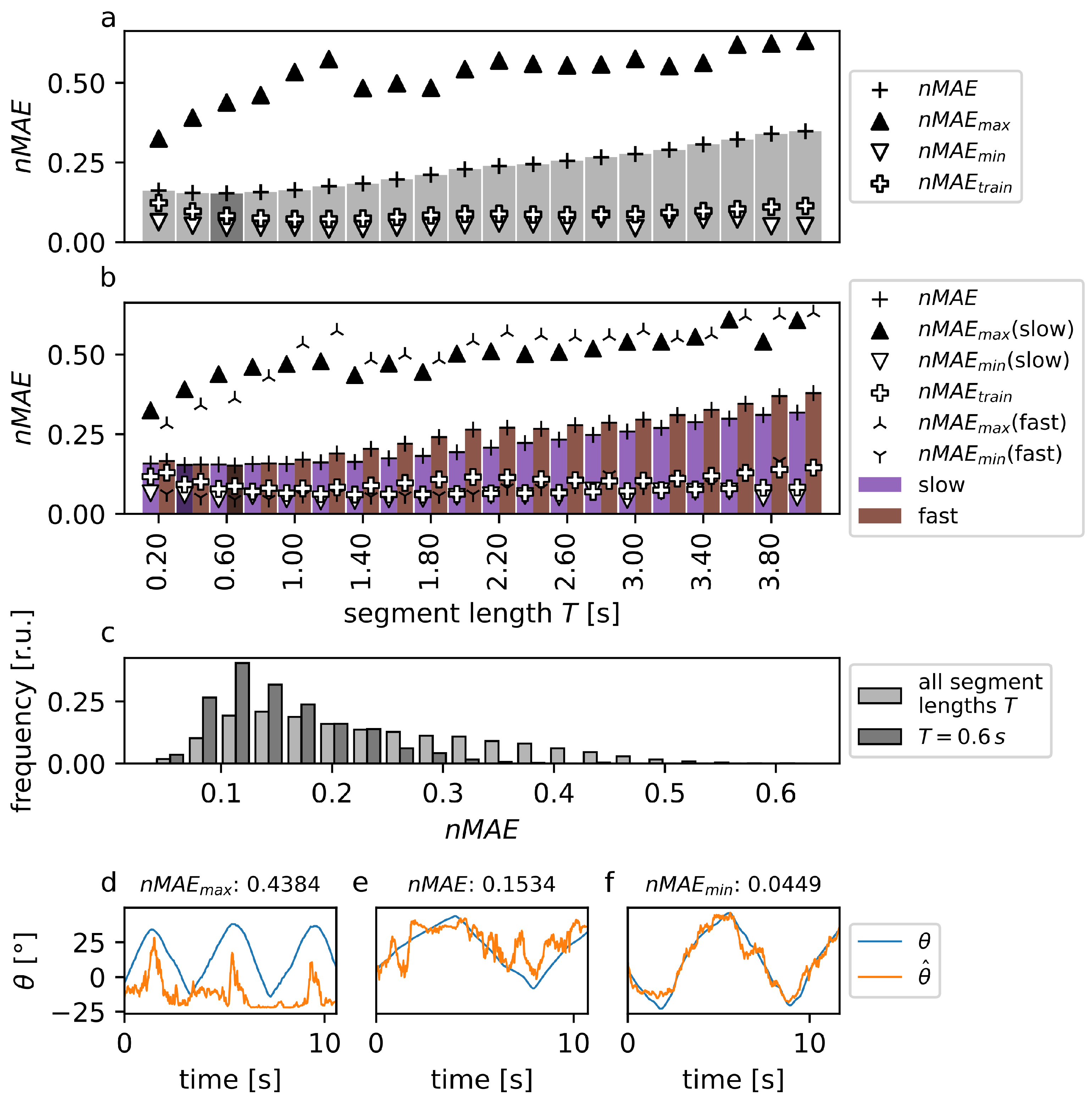
3.2.1. Evaluation of Segment Length
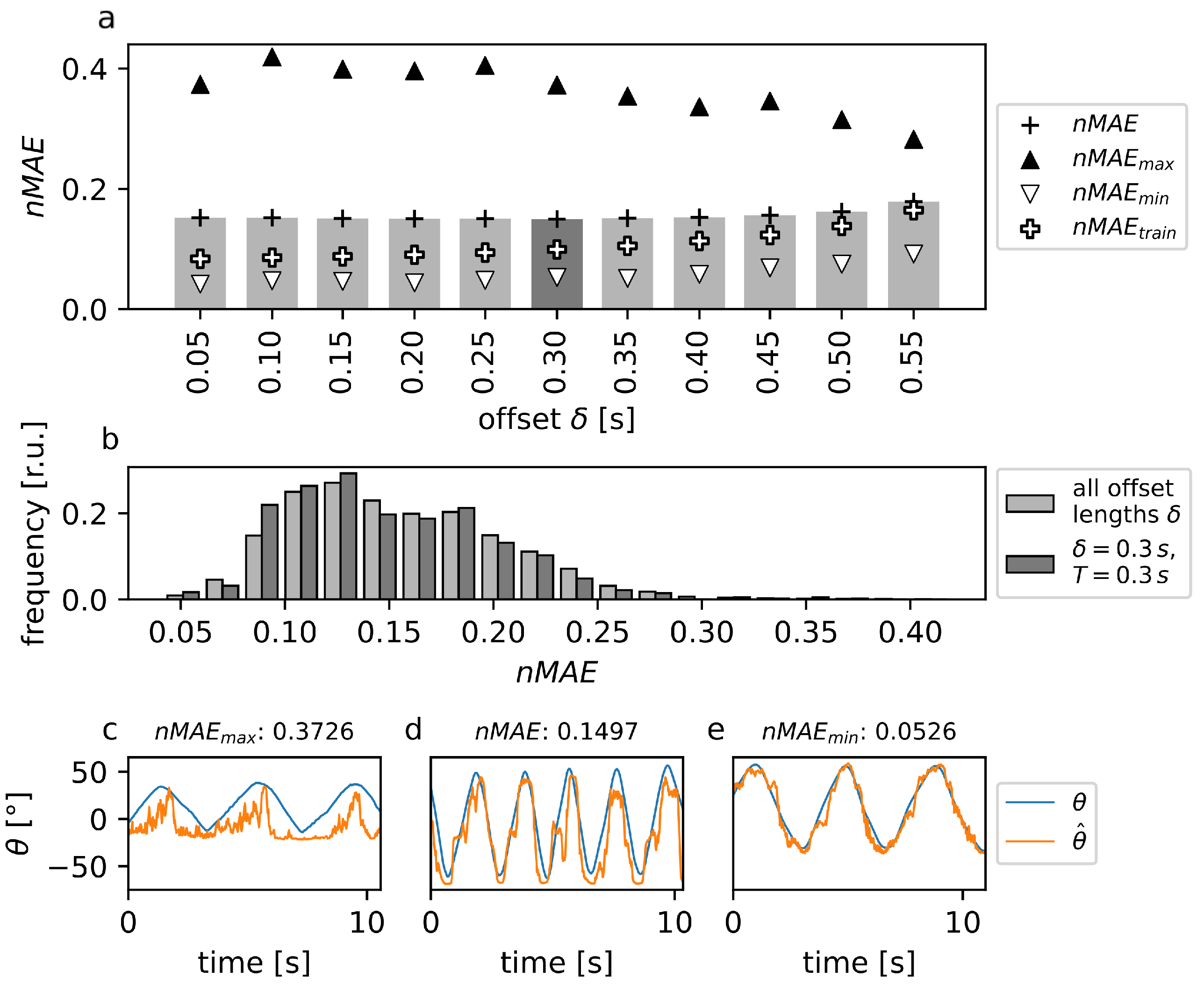
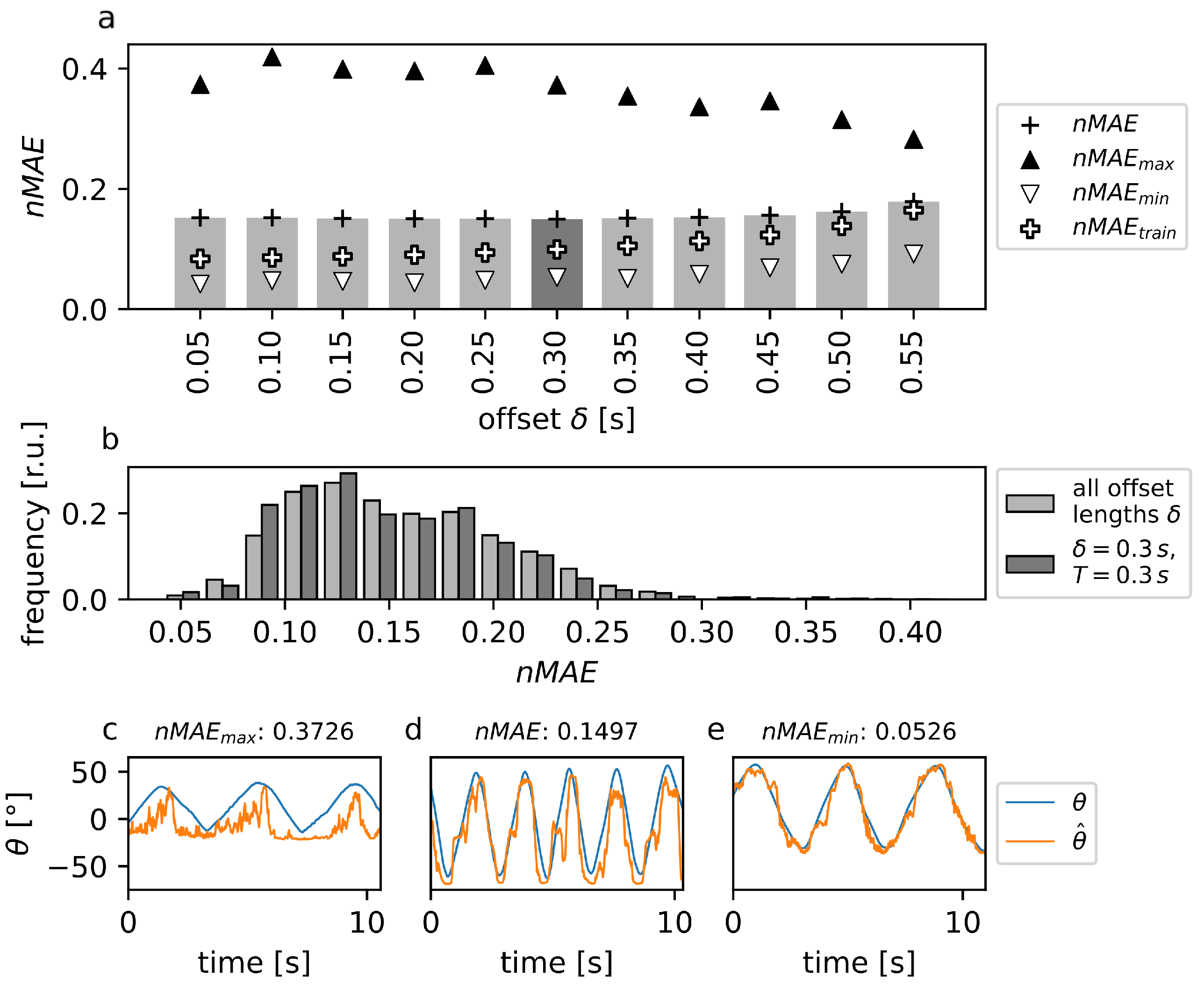
3.2.2. Evaluation of the Segment Boundary Offset
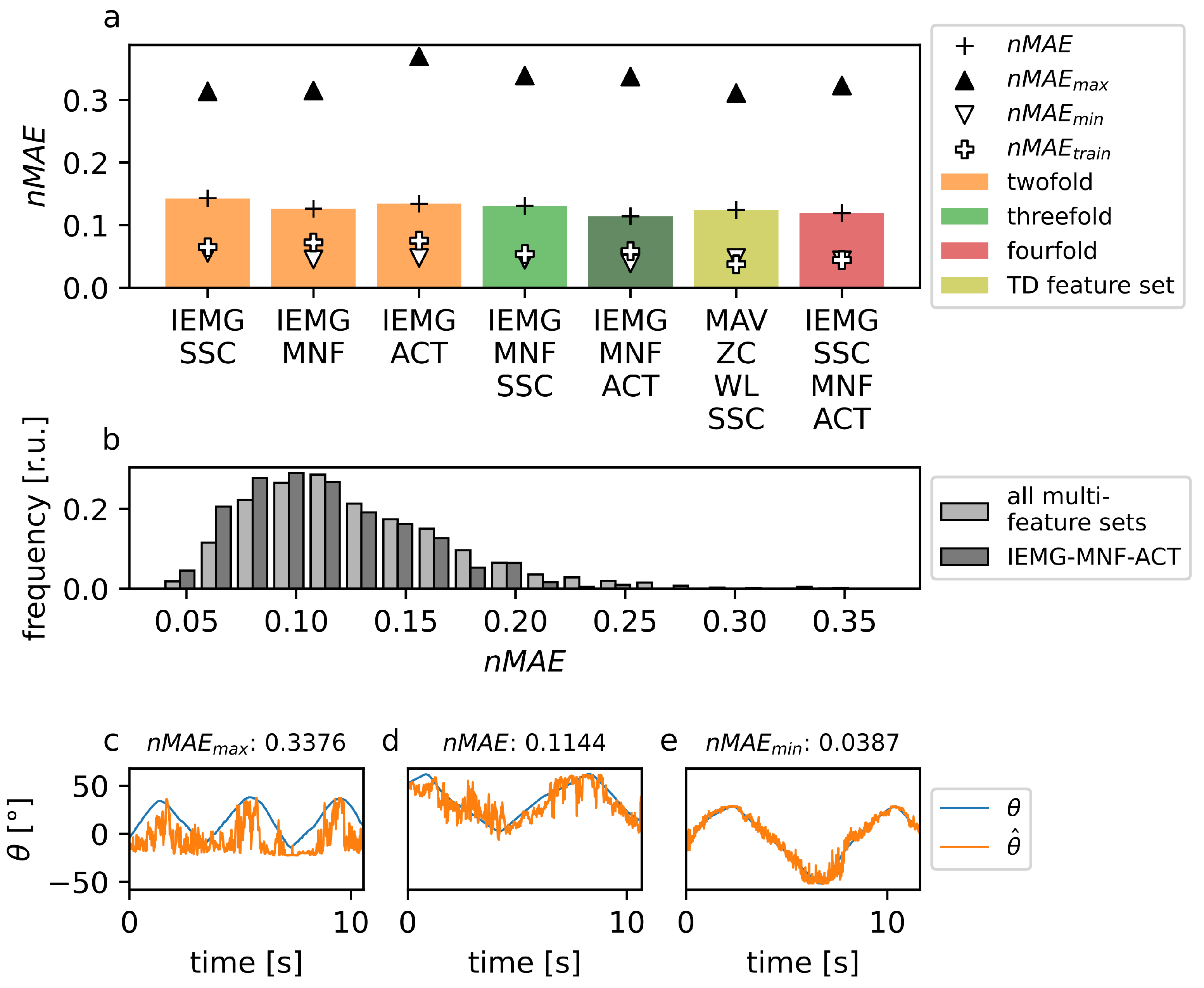
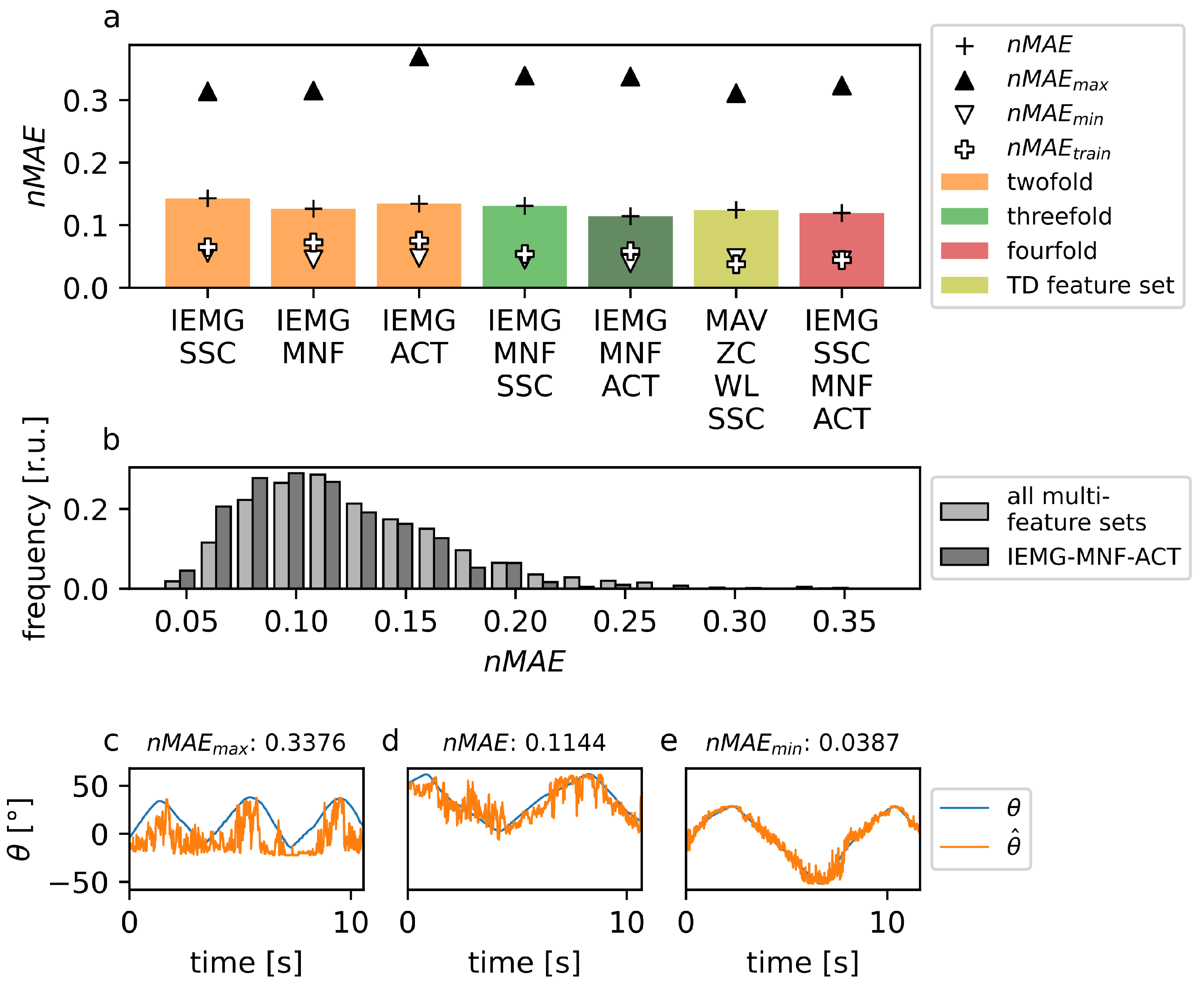
3.3. Multi-Feature Sets
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EMG | electromyography |
| sEMG | surface electromyography |
| TD | time domain |
| FD | frequency domain |
| FFNN | feed forward neural network |
| RMS | root mean square |
| MAV | mean absolute value |
| ZC | zero crossings |
| SSC | slope sign changes |
| VAR | variance |
| SD | standard deviation |
| WL | waveform length |
| WAMP | Willison amplitude |
| IEMG | integrated EMG |
| AR | autoregressive coefficients |
| MNF | mean of signal frequencies |
| FFT | Fast Fourier transform |
| ACT | muscle activation |
| MSE | mean squared error |
| MAE | mean absolute error |
| nMAE | normalized mean absolute error |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Age | Sex | Height in m | Weight in kg | |
|---|---|---|---|---|
| subject_20 | 23 | female | 1.64 | 68.00 |
| subject_21 | 25 | male | 1.76 | 75.00 |
| subject_22 | 25 | male | 1.90 | 85.00 |
| subject_24 | 24 | male | 1.83 | 60.00 |
| subject_25 | 25 | - | 1.93 | 85.00 |
| subject_26 | 25 | male | 1.80 | 65.00 |
| subject_28 | 22 | male | 1.83 | 73.00 |
| subject_29 | 26 | male | 1.76 | 80.00 |
| subject_30 | 25 | male | 1.90 | 130.00 |
| subject_31 | 26 | - | 1.77 | 67.00 |
| subject_32 | 29 | male | 1.78 | 110.00 |
| subject_33 | 25 | male | 1.87 | 90.00 |
| subject_34 | 23 | male | 1.75 | 63.00 |
| subject_36 | 26 | female | 1.75 | 67.00 |
| subject_37 | 29 | male | 1.84 | 70.00 |
| subject_38 | 24 | male | 1.80 | 75.00 |
| subject_39 | 24 | male | 1.86 | 82.00 |
| subject_40 | 25 | male | 1.82 | 68.00 |
| subject_41 | 23 | male | 1.67 | 69.00 |
| subject_42 | 23 | male | 1.87 | 81.00 |
| subject_43 | 22 | male | 1.76 | 58.00 |
| subject_44 | 25 | male | 1.86 | 85.00 |
| subject_45 | 34 | male | 1.90 | 90.00 |
| subject_46 | 27 | - | 1.96 | 105.00 |
| subject_47 | 24 | male | 1.91 | 86.00 |
| subject_48 | 28 | male | 1.86 | 98.00 |
| subject_49 | 22 | male | 1.89 | 85.00 |
| subject_51 | 24 | male | 1.94 | 79.00 |
| subject_52 | 32 | male | 1.90 | 74.00 |
| subject_53 | 23 | female | 1.60 | 47.00 |
| mean | 25.27 | - | 1.82 | 79.00 |
| standard deviation | 2.76 | - | 0.09 | 16.46 |
| 2 kg | 4 kg | ||||
|---|---|---|---|---|---|
| x | - | x | - | x | - |
| x | - | x | - | - | x |
| x | - | - | x | x | - |
| x | - | - | x | - | x |
| - | x | x | - | x | - |
| - | x | x | - | - | x |
| - | x | - | x | x | - |
| - | x | - | x | - | x |
References
- Aida, T.; Nozaki, H.; Kobayashi, H. Development of muscle suit and application to factory laborers. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1027–1032. [Google Scholar] [CrossRef]
- Kim, W.; Lee, H.; Lim, D.; Han, J.; Han, C. Development of a Lower Extremity Exoskeleton System for Walking Assistance While Load Carrying. In WORLD SCIENTIFIC Proceedings of the 16th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines-University of Technology Sydney, Australia, 14–17 July 2012; World Scientific: Singapore, 2013; pp. 35–42. [Google Scholar] [CrossRef]
- Silveira, A.; Abreu de Souza, M.; Fernandes, B.; Nohama, P. From the past to the future of therapeutic orthoses for upper limbs rehabilitation. Res. Biomed. Eng. 2018, 34, 368–380. [Google Scholar] [CrossRef]
- Pundik, S.; McCabe, J.; Kesner, S.; Skelly, M.; Fatone, S. Use of a myoelectric upper limb orthosis for rehabilitation of the upper limb in traumatic brain injury: A case report. J. Rehabil. Assist. Technol. Eng. 2020, 7, 2055668320921067. [Google Scholar] [CrossRef] [PubMed]
- Wehner, M.; Rempel, D.; Kazerooni, H. Lower Extremity Exoskeleton Reduces Back Forces in Lifting. In WORLD SCIENTIFIC Proceedings of the 16th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, University of Technology Sydney, Sydney, Australia, 14–17 July 2012; World Scientific: Singapore, 2013; pp. 49–56. [Google Scholar] [CrossRef]
- Hasegawa, Y.; Muramatsu, M. Wearable lower-limb assistive device for physical load reduction of caregiver on transferring support. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 1027–1032. [Google Scholar] [CrossRef]
- Tsuzura, M.; Nakakuki, T.; Misaki, D. A mechanism design of waist power assist suit for a caregiver by using torsion springs. In Proceedings of the 2013 13th International Conference on Control, Automation and Systems (ICCAS 2013), Gwangju, Korea, 20–23 October 2013; pp. 866–868. [Google Scholar] [CrossRef]
- Giovacchini, F.; Vannetti, F.; Fantozzi, M.; Cempini, M.; Cortese, M.; Parri, A.; Yan, T.; Lefeber, D.; Vitiello, N. A light-weight active orthosis for hip movement assistance. Robot. Auton. Syst. 2015, 73, 123–134. [Google Scholar] [CrossRef]
- Boschmann, A.; Platzner, M. Towards robust HD EMG pattern recognition: Reducing electrode displacement effect using structural similarity. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; Volume 2014, pp. 4547–4550. [Google Scholar]
- Kim, J.; Koo, B.; Nam, Y.; Kim, Y. sEMG-Based Hand Posture Recognition Considering Electrode Shift, Feature Vectors, and Posture Groups. Sensors 2021, 21, 7681. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Liu, G.; Zhang, B.; Zhang, D.; Han, J. Electrode Shifts Estimation and Adaptive Correction for Improving Robustness of sEMG-Based Recognition. IEEE J. Biomed. Health Inform. 2021, 25, 1101–1110. [Google Scholar] [CrossRef]
- Hill, A.V. The effect of load on the heat of shortening of muscle. Proc. R. Soc. Lond. Ser. Biol. Sci. 1964, 159, 297–318. [Google Scholar]
- Zajac, F.E. Muscle and tendon: Properties, models, scaling, and application to biomechanics and motor control. Crit. Rev. Biomed. Eng. 1989, 17, 359–411. [Google Scholar]
- Buchanan, T.S.; Lloyd, D.G.; Manal, K.; Besier, T.F. Neuromusculoskeletal modeling: Estimation of muscle forces and joint moments and movements from measurements of neural command. J. Appl. Biomech. 2004, 20, 367–395. [Google Scholar] [CrossRef] [Green Version]
- Côté-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep Learning for Electromyographic Hand Gesture Signal Classification Using Transfer Learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 760–771. [Google Scholar] [CrossRef] [Green Version]
- Aung, Y.M.; Al-Jumaily, A. Estimation of Upper Limb Joint Angle Using Surface EMG Signal. Int. J. Adv. Robot. Syst. 2013, 10, 369. [Google Scholar] [CrossRef] [Green Version]
- Kiguchi, K.; Hayashi, Y. An EMG-Based Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE Trans. Syst. Man. Cybern. B Cybern. 2012, 42, 1064–1071. [Google Scholar] [CrossRef]
- El-Khoury, S.; Batzianoulis, I.; Antuvan, C.W.; Contu, S.; Masia, L.; Micera, S.; Billard, A. EMG-based learning approach for estimating wrist motion. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 6732–6735. [Google Scholar] [CrossRef] [Green Version]
- Oskoei, M.A.; Hu, H. Support Vector Machine-Based Classification Scheme for Myoelectric Control Applied to Upper Limb. IEEE Trans. Biomed. Eng. 2008, 55, 1956–1965. [Google Scholar] [CrossRef]
- López-Delis, A.; Ruiz-Olaya, A.F.; Freire-Bastos, T.; Delisle-Rodríguez, D. A Comparison of Myoelectric Pattern Recognition Methods to Control an Upper Limb Active Exoskeleton. In Progress in Pattern Recognition, Image Analysis, Computer Vision, and Applications; Ruiz-Shulcloper, J., Sanniti di Baja, G., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 100–107. [Google Scholar] [CrossRef]
- David Orjuela-Cañón, A.; Ruíz-Olaya, A.F.; Forero, L. Deep neural network for EMG signal classification of wrist position: Preliminary results. In Proceedings of the 2017 IEEE Latin American Conference on Computational Intelligence (LA-CCI), Arequipa, Peru, 8–10 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Akhundov, R.; Saxby, D.J.; Edwards, S.; Snodgrass, S.; Clausen, P.; Diamond, L.E. Development of a deep neural network for automated electromyographic pattern classification. J. Exp. Biol. 2019, 222, jeb198101. [Google Scholar] [CrossRef] [Green Version]
- Rainoldi, A.; Merletti, R.; Barbero, M. Atlas of Muscle Innervation Zones: Understanding Surface Electromyography and Its Applications; Springer: Milan, Italy, 2012. [Google Scholar]
- Fuentes, S.; Wei, Y.; Olmeda, E.; Ren, L.; Wei, G.; Díaz, V. Validation of a Low-Cost Electromyography (EMG) System via a Commercial and Accurate EMG Device: Pilot Study. Sensors 2019, 19, 5214. [Google Scholar] [CrossRef] [Green Version]
- Huxley, A.F.; Niedergerke, R. Structural changes in muscle during contraction: Interference microscopy of living muscle fibres. Nature 1954, 173, 971–973. [Google Scholar] [CrossRef]
- Huxley, H.; Hanson, J. Changes in the cross-striations of muscle during contraction and stretch and their structural interpretation. Nature 1954, 173, 973–976. [Google Scholar] [CrossRef]
- Lymn, R.; Taylor, E.W. Mechanism of adenosine triphosphate hydrolysis by actomyosin. Biochemistry 1971, 10, 4617–4624. [Google Scholar] [CrossRef]
- Inman, V.T.; Ralston, H.J.; Saunders, J.B.; Feinstein, B.; Wright, E.W.J. Relation of human electromyogram to muscular tension. Electroencephalogr. Clin. Neurophysiol. 1952, 4, 187–194. [Google Scholar] [CrossRef]
- Howatson, G. The impact of damaging exercise on electromechanical delay in biceps brachii. J. Electromyogr. Kinesiol. 2010, 20, 477–481. [Google Scholar] [CrossRef]
- Pulliam, C.L.; Lambrecht, J.M.; Kirsch, R.F. Electromyogram-based neural network control of transhumeral prostheses. J. Rehabil. Res. Dev. 2011, 48, 739–754. [Google Scholar] [CrossRef]
- Winters, J.M. An improved muscle-reflex actuator for use in large-scale neuro-musculoskeletal models. Ann. Biomed. Eng. 1995, 23, 359–374. [Google Scholar] [CrossRef] [PubMed]
- Luca, C.J.D. The Use of Surface Electromyography in Biomechanics. J. Appl. Biomech. 1997, 13, 135–163. [Google Scholar] [CrossRef] [Green Version]
- Gupta, S.D. Estimation of Arm Joint Angles from Surface Electromyography signals using Artificial Neural Networks. IOSR J. Comput. Eng. 2013, 15, 38–44. [Google Scholar] [CrossRef]
- Hudgins, B.; Parker, P.; Scott, R.N. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B. A robust, real-time control scheme for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2003, 50, 848–854. [Google Scholar] [CrossRef]
- Mattioli, F.E.R.; Lamounier, E.A.J.; Cardoso, A.; Soares, A.B.; Andrade, A.O. Classification of EMG signals using artificial neural networks for virtual hand prosthesis control. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 7254–7257. [Google Scholar]
- Akhtar, A.; Hargrove, L.; Bretl, T. Prediction of distal arm joint angles from EMG and shoulder orientation for prosthesis control. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; Volume 2012, pp. 4160–4163. [Google Scholar] [CrossRef]
- Ahsan, M.R.; Ibrahimy, M.; Khalifa, O. The Use of Artificial Neural Network in the Classification of EMG Signals. In Proceedings of the 2012 Third FTRA International Conference on Mobile, Ubiquitous, and Intelligent Computing, Vancouver, BC, Canada, 26–28 June 2012; pp. 225–229. [Google Scholar] [CrossRef]
- Jahan, M.; Manas, M.; Sharma, B.B.; Gogoi, B.B. Feature extraction and pattern recognition of EMG-based signal for hand movements. In Proceedings of the 2015 International Symposium on Advanced Computing and Communication (ISACC), Silchar, India, 14–15 September 2015; pp. 49–52. [Google Scholar] [CrossRef]
- Noble, J.; Retheep, R.; Adithya, P.K.; Sivanadan, K.S. Classification of forearm movements from sEMG time domain features using machine learning algorithms. In Proceedings of the TENCON 2017-2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 1624–1628. [Google Scholar] [CrossRef]
- Abadi, M.; Agarwal, A.; Barham, P.; Brevdo, E.; Chen, Z.; Citro, C.; Corrado, G.S.; Davis, A.; Dean, J.; Devin, M.; et al. TensorFlow: Large-Scale Machine Learning on Heterogeneous Systems. 2015. Available online: tensorflow.org (accessed on 5 February 2022).
- Van Rossum, G.; Drake, F.L., Jr. Python Reference Manual; Centrum voor Wiskunde en Informatica: Amsterdam, The Netherlands, 1995. [Google Scholar]
- Bejani, M.M.; Ghatee, M. A systematic review on overfitting control in shallow and deep neural networks. Artif. Intell. Rev. 2021, 54, 6391–6438. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leserri, D.; Grimmelsmann, N.; Mechtenberg, M.; Meyer, H.G.; Schneider, A. Evaluation of sEMG Signal Features and Segmentation Parameters for Limb Movement Prediction Using a Feedforward Neural Network. Mathematics 2022, 10, 932. https://doi.org/10.3390/math10060932
Leserri D, Grimmelsmann N, Mechtenberg M, Meyer HG, Schneider A. Evaluation of sEMG Signal Features and Segmentation Parameters for Limb Movement Prediction Using a Feedforward Neural Network. Mathematics. 2022; 10(6):932. https://doi.org/10.3390/math10060932
Chicago/Turabian StyleLeserri, David, Nils Grimmelsmann, Malte Mechtenberg, Hanno Gerd Meyer, and Axel Schneider. 2022. "Evaluation of sEMG Signal Features and Segmentation Parameters for Limb Movement Prediction Using a Feedforward Neural Network" Mathematics 10, no. 6: 932. https://doi.org/10.3390/math10060932
APA StyleLeserri, D., Grimmelsmann, N., Mechtenberg, M., Meyer, H. G., & Schneider, A. (2022). Evaluation of sEMG Signal Features and Segmentation Parameters for Limb Movement Prediction Using a Feedforward Neural Network. Mathematics, 10(6), 932. https://doi.org/10.3390/math10060932