
Multiscale Monitoring Using Machine Learning Methods: New Methodology and an Industrial Application to a Photovoltaic System




Abstract
:1. Introduction and Bibliographical Review
2. Kernel Principal Component Analysis
2.1. Notations and Symbols
2.2. Principle
- [Polynomial kernel]
- [Sigmoid kernel]
- [Radial kernel]
2.3. Fault Detection and Control Limits
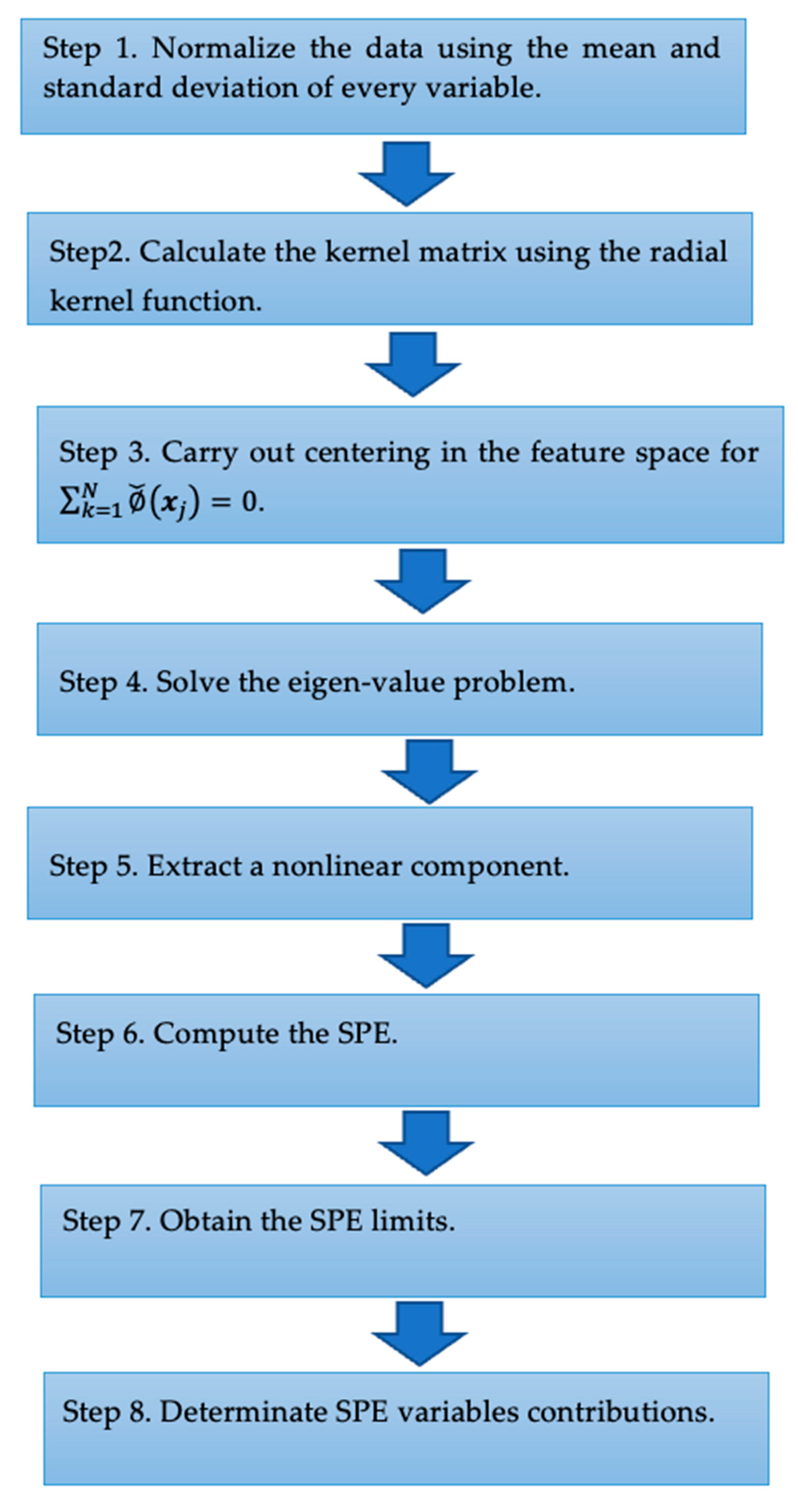
2.4. Kernel PCA Algorithm
3. Multiscale Monitoring Using Kernel PCA
3.1. Principle
- Step 1: Decompose multivariate data into wavelet coefficients with the help of the DWT. We introduce “haar” as a mother wavelet and use DWT on five scales.
- Step 2: Apply the kernel PCA to coefficients of approximation. At that level (scale), the SPE is employed for identifying defects, while the coefficients displaying an overrun pertaining to the control thresholds are reserved for data reconstruction.
- Step 3: Reconstruct with the inverse of DWT.
- Step 4: Use the kernel PCA to the reconstructed data to identify and isolate defects. Note that bulleted lists look as in Figure 1.
3.2. Numerical Example
- -
- The traditional PCA does not detect fault at the time-frequency scales.
- -
- The neural PCA slightly assesses the stimulated defect, that is, the defect is identified only at the variable .
- -
- The proposed method identifies the stimulated defects at the level of wavelet coefficients, that is, the defect is identified in variables and .
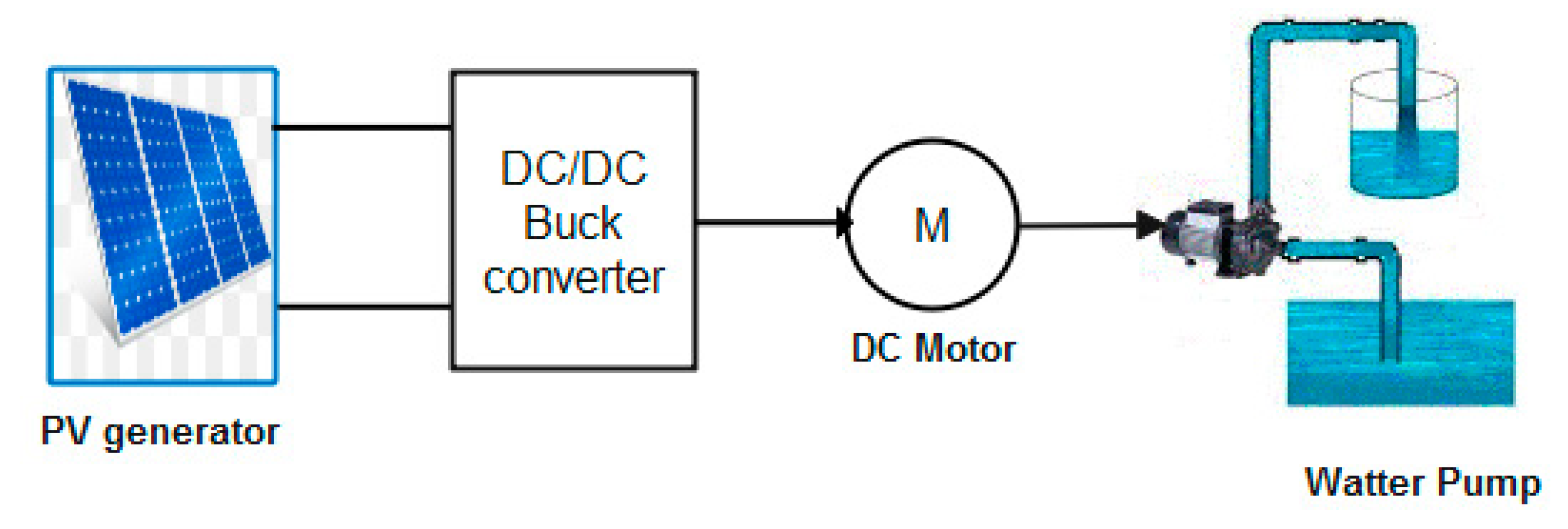
4. Experimental Results
4.1. Power Voltage System Parameters
4.2. Power Voltage System Data Matrix
- -
- : motor current.
- -
- : the angular speed.
- -
- : converter output voltage.
- -
- : photovoltaic system output.
4.3. Power Voltage System Monitoring Using the Developed Approach
- -
- Step 1: Use the DWT (mother wavelet:db5).
- -
- Step 2: Apply the kernel PCA algorithm to wavelet coefficients.
- -
- Step 3: Utilize the SPE for fault detection.
- -
- Step 4: Reconstruct data matrix using only defected coefficients.
- -
- Step 5: Employ the kernel PCA into a new matrix.
- -
- Step 6: Detect faults considering the SPE.
- -
- Step 7: Assess fault isolation by computing contributions.
4.4. Results
- (i)
- The data matrix —see expression given in (21)—is decomposed to wavelet coefficients using the DWT (with the haar wavelet).
- (ii)
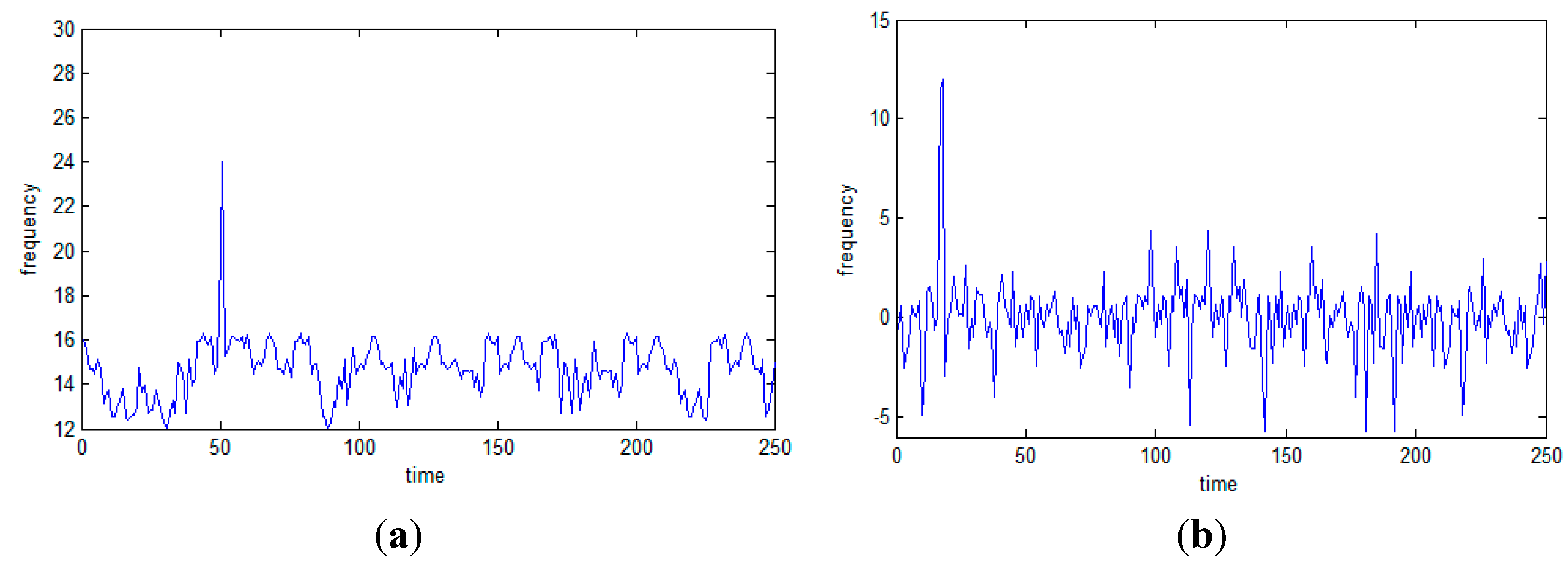
- To better evaluate our monitoring algorithm, we stimulate a fault at variable . Figure 9 presents the wavelet coefficients of the defected variable.
- (iii)
- The data matrix is then reconstructed using a defected scale (scale 4).
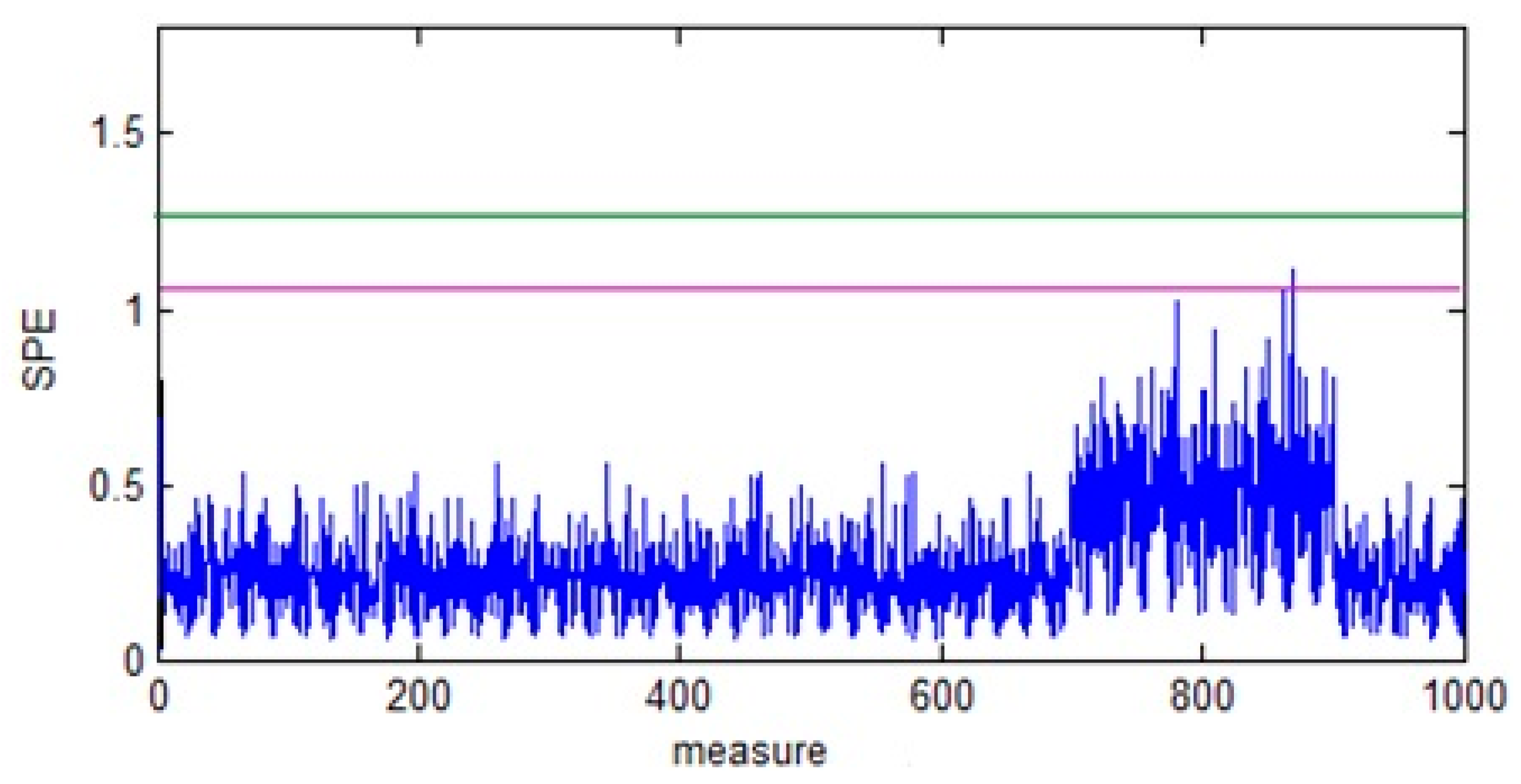
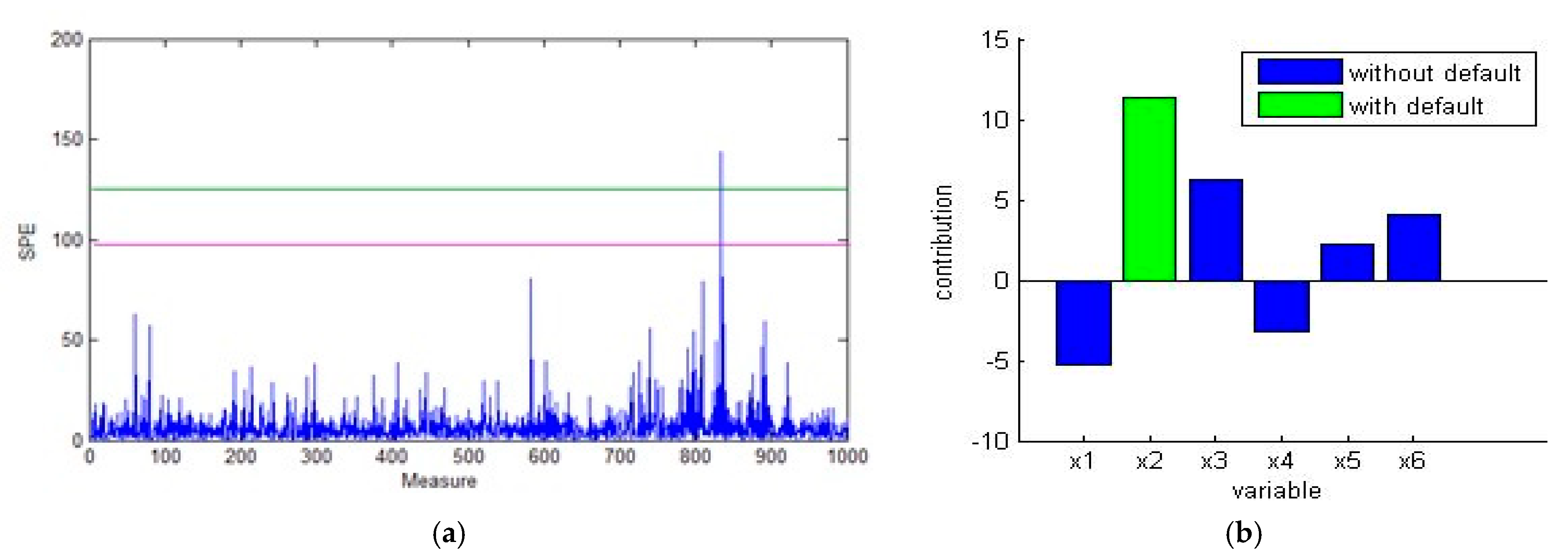
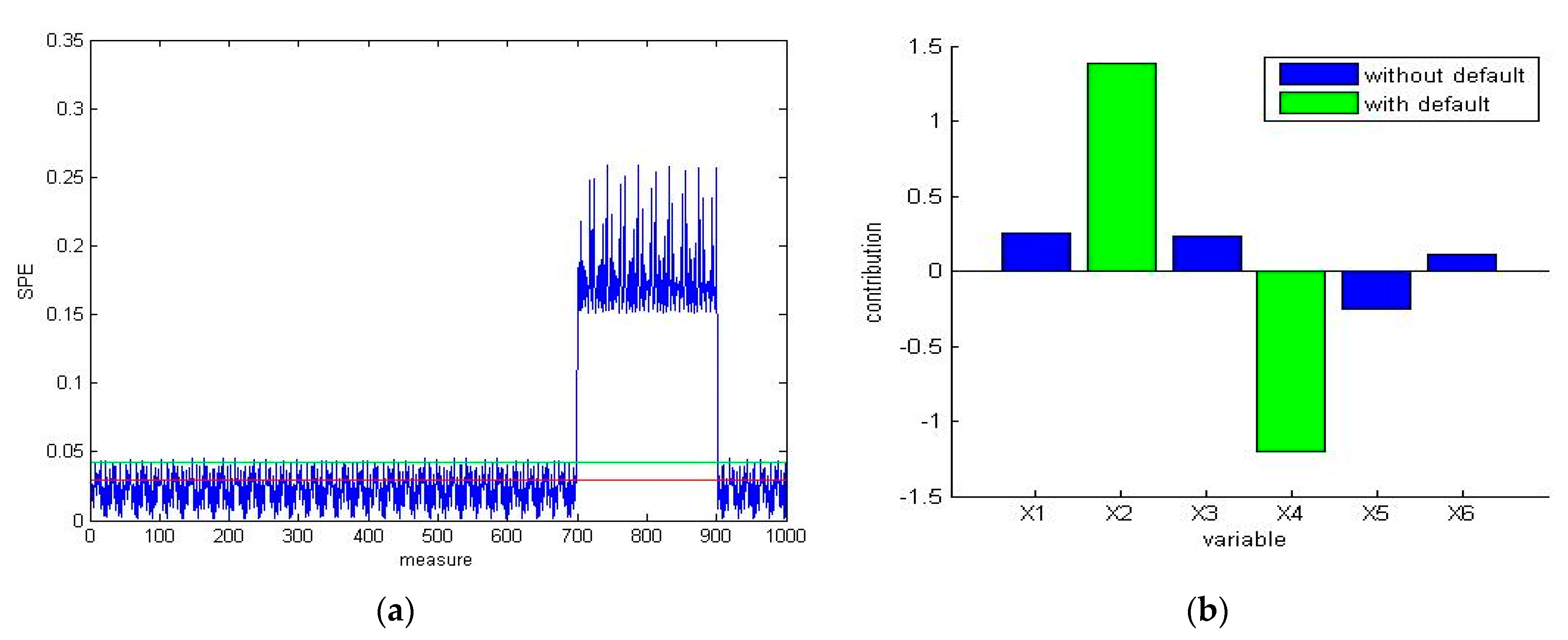
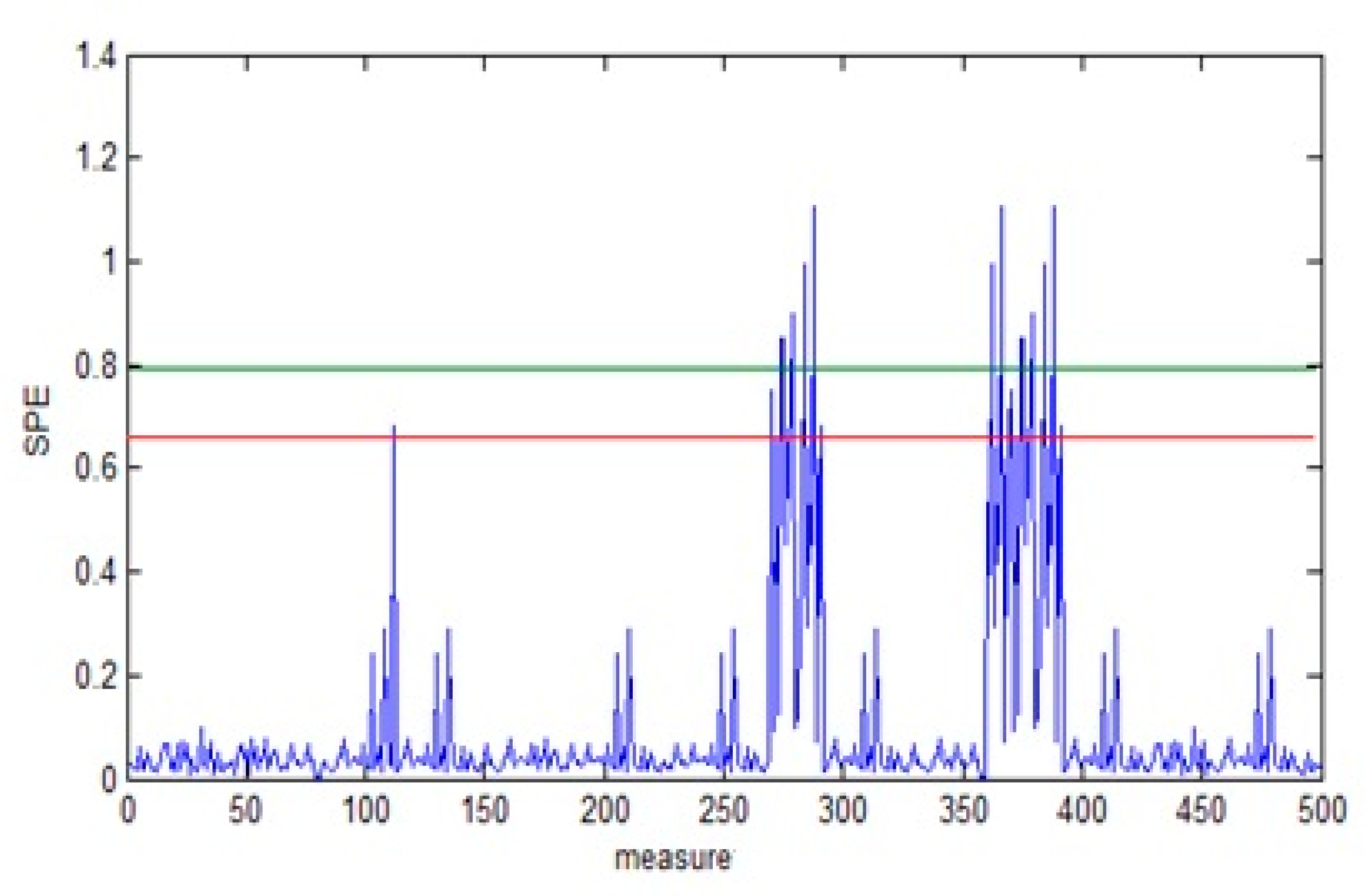
- (iv)
- We apply the SPE for fault detection to the reconstructed matrix as shown in Figure 10. Note that there is an exceeding of limits which proves the existence of defects.
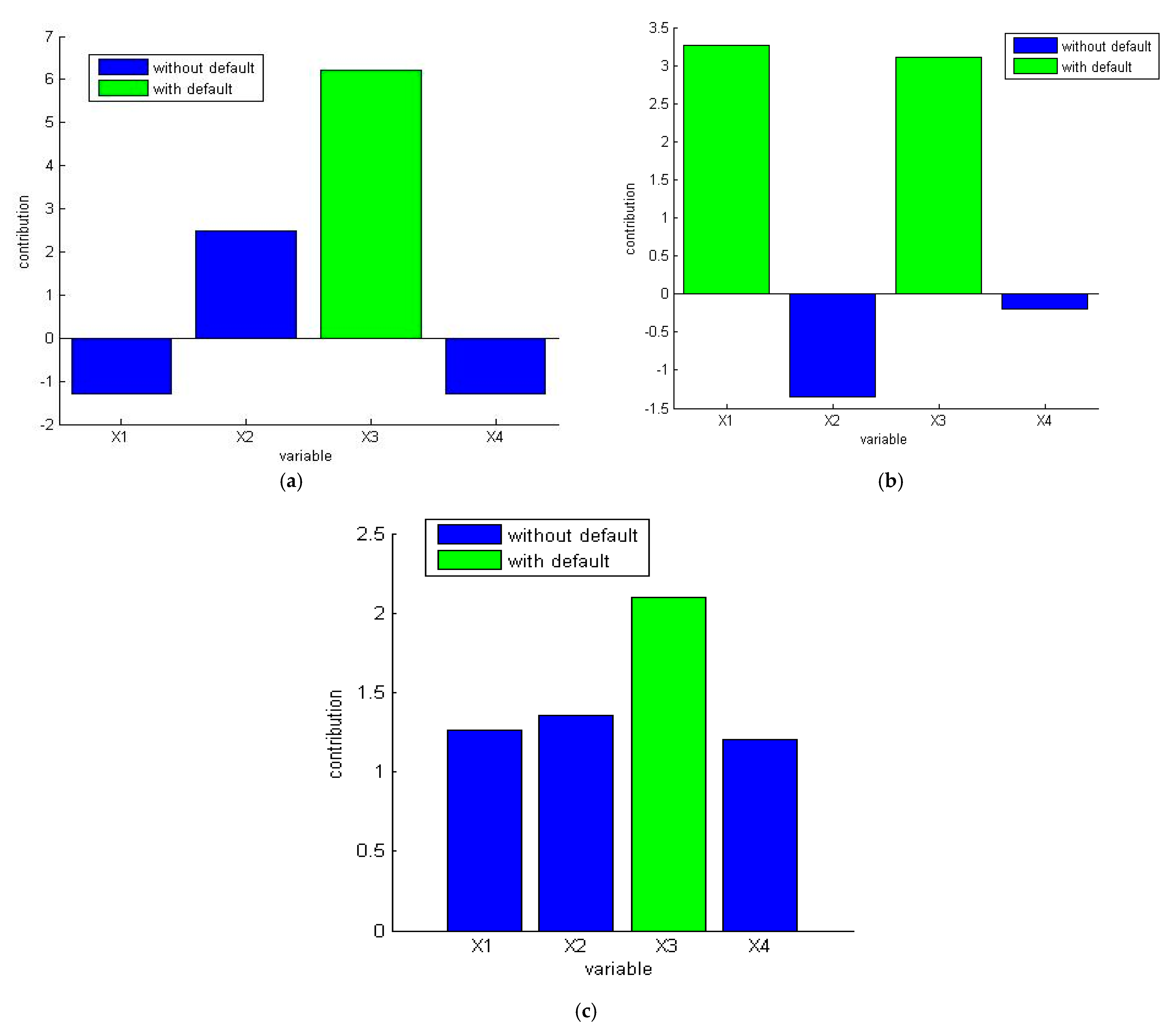
- (v)
- For identifying the location of the defect, we calculate the contribution of different variables of the data matrix. From Figure 11, we observe that the highest contribution corresponds to the variable (current motor). As a result, this variable is the origin of the defect.
4.5. Comparative Analysis with Other Monitoring Methods
5. Conclusions, Limitations, and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nguyen, T.H.; Nguyen, T.L.; Sidorov, D.N.; Dreglea, A. Robust approach to detect gas bubbles through images analysis. Intell. Decis. Technol. 2020, 14, 153–158. [Google Scholar] [CrossRef]
- Aykroyd, R.G.; Leiva, V.; Ruggeri, F. Recent developments of control charts, identification of big data sources and future trends of current research. Technol. Forecast. Soc. Chang. 2019, 144, 221–232. [Google Scholar] [CrossRef]
- Bustos, N.; Tello, M.; Droppelmann, G.; Garcia, N.; Feijoo, F.; Leiva, V. Machine learning techniques as an efficient alternative diagnostic tool for COVID-19 cases. Signa Vitae 2022, 18, 23–33. [Google Scholar]
- Ma, L.; Zhang, Y.; Leiva, V.; Liu, S.; Ma, T. A new clustering algorithm based on a radar scanning strategy with applications to machine learning data. Expert Syst. Appl. 2022, 191, 116143. [Google Scholar] [CrossRef]
- Mahdi, E.; Leiva, V.; Mara’Beh, S.; Martin-Barreiro, C. A new approach to predicting cryptocurrency returns based on the gold prices with support vector machines during the COVID-19 pandemic using sensor-related data. Sensors 2021, 21, 6319. [Google Scholar] [CrossRef]
- Nor, A.K.M.; Pedapati, S.R.; Muhammad, M.; Leiva, V. Overview of explainable artificial intelligence for prognostic and health management of industrial assets based on preferred reporting items for systematic reviews and meta-analyses. Sensors 2021, 21, 8020. [Google Scholar] [CrossRef] [PubMed]
- Nor, A.K.M.; Pedapati, S.R.; Muhammad, M.; Leiva, V. Abnormality detection and failure prediction using explainable Bayesian deep learning: Methodology and case study with industrial data. Mathematics 2022, 10, 554. [Google Scholar] [CrossRef]
- Palacios, C.A.; Reyes-Suarez, J.A.; Bearzotti, L.A.; Leiva, V.; Marchant, C. Knowledge discovery for higher education student retention based on data mining: Machine learning algorithms and case study in Chile. Entropy 2021, 23, 485. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, R.; Maniak, T.; Doctor, F.; Karyotis, C. Fault detection and isolation in industrial processes using deep learning approaches. IEEE Trans. Ind. Inform. 2019, 15, 3077–3084. [Google Scholar] [CrossRef]
- Fazai, R.; Ben Abdellafou, K.; Said, M.; Taouali, O. Online fault detection and isolation of an AIR quality monitoring network based on machine learning and metaheuristic methods. Int. J. Adv. Manuf. Technol. 2018, 99, 2789–2802. [Google Scholar] [CrossRef]
- Hamadache, M.; Lee, D. Principal component analysis based signal to noise ratio improvement for inchoate faulty signals: Application to ball bearing fault detection. Int. J. Control Autom. Syst. 2017, 15, 506–517. [Google Scholar] [CrossRef]
- Harkat, M.F.; Djelel, S.; Doghmane, N.; Benouaret, M. Sensor fault detection, isolation and reconstruction using nonlinear principal component analysis. Int. J. Autom. Comput. 2007, 4, 149–155. [Google Scholar] [CrossRef]
- Wang, G.; Luo, H.; Peng, K. Quality-related fault detection using linear and nonlinear principal component regression. J. Frankl. Inst. 2016, 353, 2159–2177. [Google Scholar] [CrossRef]
- Said, M.; Fazai, R.; Abdellafou, K.B.; Taouali, O. Decentralized fault detection and isolation using bond graph and PCA methods. Int. J. Adv. Manuf. Technol. 2018, 99, 517–529. [Google Scholar] [CrossRef]
- Cherry, G.A.; Qin, S.J. Multiblock principal component analysis based on a combined index for semiconductor fault detection and diagnosis. IEEE Trans. Semicond. Manuf. 2006, 19, 159–172. [Google Scholar] [CrossRef]
- Sheriff, M.Z.; Mansouri, M.; Karim, M.N.; Nounou, H.; Nounou, M. Fault detection using multiscale PCA-based moving window GLRT. J. Process. Control 2017, 54, 47–64. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, C. Fault diagnosis of nonlinear processes using multiscale kPCA and multiscale kPLS. Chem. Eng. Sci. 2011, 66, 64–72. [Google Scholar] [CrossRef]
- Yellapu, V.S.; Vajpayee, V.; Tiwari, A.P. Online fault detection and isolation in advanced heavy water reactor using multiscale principal component analysis. IEEE Trans. Nucl. Sci. 2019, 66, 1790–1803. [Google Scholar] [CrossRef]
- He, Q.H.; He, X.Y.; Zhu, J.X. Fault detection of excavator’s hydraulic system based on dynamic principal component analysis. J. Cent. South Univ. Technol. 2008, 15, 700–705. [Google Scholar] [CrossRef]
- Luo, R.; Misra, M.; Himmelblau, D.M. Sensor fault detection via multiscale analysis and dynamic PCA. Ind. Eng. Chem. Res. 1999, 38, 1489–1495. [Google Scholar] [CrossRef]
- Molloy, M.; Martin, E.B. Application of multiway principal component analysis for identification of process improvements in pharmaceutical manufacture. IFAC Proc. 2013, 46, 283–288. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Bao, J.; Skyllas-Kazacos, M.; Welch, B.J.; Akhmetov, S. Fault detection and diagnosis in hall heroult cells based on individual anode current measurements using dynamic kernel PCA. Metall. Mater. Trans. B 2018, 49, 2077–2088. [Google Scholar] [CrossRef]
- Jiang, Q.; Yan, X.; Lv, Z.; Guo, M. Fault detection in nonlinear chemical processes based on kernel entropy component analysis and angular structure. Korean J. Chem. Eng. 2013, 30, 1181–1186. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Golinval, J.C. Fault detection based on kernel principal component analysis. Eng. Struct. 2010, 32, 3683–3691. [Google Scholar] [CrossRef]
- Mansouri, M.; Nounou, M.; Nounou, H.; Karim, N. Kernel PCA-based GLRT for nonlinear fault detection of chemical processes. J. Loss Prev. Process Ind. 2016, 40, 334–347. [Google Scholar] [CrossRef]
- Navi, M.; Davoodi, M.; Meskin, N. Sensor fault detection and isolation of an autonomous underwater vehicle using partial kernel pca. In Proceedings of the 2015 IEEE Conference on Prognostics and Health Management, Beijing, China, 21–23 October 2015; pp. 1–9. [Google Scholar]
- Bakshi, B.R. Multiscale PCA with application to multivariate statistical process monitoring. AIChE J. 1998, 44, 1596–1610. [Google Scholar] [CrossRef]
- Popli, R.; Kansal, I.; Garg, A.; Goyal, N.; Garg, K. Classification and recognition of online hand-written alphabets using machine learning methods. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1022, 012111. [Google Scholar] [CrossRef]
- Popli, R.; Sethi, M.; Kansal, I.; Garg, A.; Goyal, N. Machine learning based security solutions in MANETs: State of the art approaches. J. Phys. Conf. Ser. 2021, 1950, 012070. [Google Scholar] [CrossRef]
- Jeong, M.K.; Lu, J.C.; Huo, X.; Vidakovic, B.; Chen, D. Wavelet-based data reduction techniques for process fault detection. Technometrics 2006, 48, 27–28. [Google Scholar] [CrossRef] [Green Version]
- Jeong, M.K.; Chen, D.; Lu, J.C. Thresholded scalogram and its applications in process fault detection. Appl. Stoch. Models Bus. Ind. 2003, 19, 231–244. [Google Scholar] [CrossRef]
- Lee, D.S.; Park, J.M.; Vanrolleghem, P.A. Adaptive multiscale principal component analysis for on-line monitoring of a sequencing batch reactor. J. Biotechnol. 2005, 116, 195–210. [Google Scholar] [CrossRef] [PubMed]
- Nomikos, P.; MacGregor, J.F. Monitoring batch processes using multiway principal component analysis. AIChE J. 1994, 40, 1361–1375. [Google Scholar] [CrossRef]
- Wang, W.; McFadden, P. Application of wavelets to gearbox vibration signals for fault detection. J. Sound Vib. 1996, 192, 927–939. [Google Scholar] [CrossRef]
- Charfeddine, S.; Jerbi, H. A Benchmarking analysis of analytical and advanced nonlinear tracking control techniques. J. Eng. Res. 2021, 9, 250–267. [Google Scholar] [CrossRef]
- Charfeddine, S.; Boudjemline, A.; Ben Aoun, S.; Jerbi, H.; Kchaou, M.; Alshammari, O.; Elleuch, Z.; Abbassi, R. Design of a fuzzy optimization control structure for nonlinear systems: A disturbance-rejection method. Appl. Sci. 2021, 11, 2612. [Google Scholar] [CrossRef]
- Chaouch, H.; Charfedine, S.; Ouni, K.; Jerbi, H.; Nabli, L. Intelligent supervision approach based on multilayer neural PCA and nonlinear gain scheduling. Neural Comput. Appl. 2019, 31, 1153–1163. [Google Scholar] [CrossRef]
- Martin-Barreiro, C.; Ramirez-Figueroa, J.A.; Nieto, A.B.; Leiva, V.; Martin-Casado, A.; Galindo-Villardón, M.P. A new algorithm for computing disjoint orthogonal components in the three-way Tucker model. Mathematics 2021, 9, 203. [Google Scholar] [CrossRef]
- Martin-Barreiro, C.; Ramirez-Figueroa, J.A.; Cabezas, X.; Leiva, V.; Galindo-Villardón, M.P. Disjoint and functional principal component analysis for infected cases and deaths due to COVID-19 in South American countries with sensor-related data. Sensors 2021, 21, 4094. [Google Scholar] [CrossRef]
- Martin-Barreiro, C.; Ramirez-Figueroa, J.A.; Nieto, A.B.; Leiva, V.; Galindo-Villardón, M.P. A new principal component analysis by particle swarm optimization with an environmental application for data science. Stoch. Environ. Res. Risk Assess. 2021, 35, 1969–1984. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| KPCA | Kernel principal components analysis |
| F | Feature space |
| Covariance matrix in the feature space | |
| Nonlinear mapping function | |
| Eigen-value | |
| Eigen-vector | |
| SPE | Square predictive error |
| N | Number of observations |
| M | Number of variables |
| Data matrix of the normal system | |
| t | Vector for measures of variables |
| SPE threshold | |
| Degrees of freedom | |
| Confidence threshold | |
| k(., .) | Kernel function |
| Parameter | Value |
|---|---|
| 4.4 A | |
| 52.75 × 10−6 A | |
| 6.73 V | |
| 4000 × 10−6 F | |
| 24 V | |
| 12 A | |
| 45 × 10−6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaouch, H.; Charfeddine, S.; Ben Aoun, S.; Jerbi, H.; Leiva, V. Multiscale Monitoring Using Machine Learning Methods: New Methodology and an Industrial Application to a Photovoltaic System. Mathematics 2022, 10, 890. https://doi.org/10.3390/math10060890
Chaouch H, Charfeddine S, Ben Aoun S, Jerbi H, Leiva V. Multiscale Monitoring Using Machine Learning Methods: New Methodology and an Industrial Application to a Photovoltaic System. Mathematics. 2022; 10(6):890. https://doi.org/10.3390/math10060890
Chicago/Turabian StyleChaouch, Hanen, Samia Charfeddine, Sondess Ben Aoun, Houssem Jerbi, and Víctor Leiva. 2022. "Multiscale Monitoring Using Machine Learning Methods: New Methodology and an Industrial Application to a Photovoltaic System" Mathematics 10, no. 6: 890. https://doi.org/10.3390/math10060890
APA StyleChaouch, H., Charfeddine, S., Ben Aoun, S., Jerbi, H., & Leiva, V. (2022). Multiscale Monitoring Using Machine Learning Methods: New Methodology and an Industrial Application to a Photovoltaic System. Mathematics, 10(6), 890. https://doi.org/10.3390/math10060890