
Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power


 ,
,  ,
,  and
and
Abstract
:1. Introduction
- To begin, power plants can be powered by a number of fuels, including fossil, natural gas, and so on. As a result, it is possible to utilize various cost coefficients for different fuels.
- In thermal power plants, a large number of valves are employed to regulate steam flow and unit output power. It is worth noting that opening the steam-admission valves can cause rapid variations in active power losses. In addition, it adds additional ripples to the cost function of generators as a result of the abrupt increase in active power losses.
- Presenting and employing a novel proposed meta-heuristic methodologies for a transmission system with unexpected wind power and FACTS devices.
- Thermal power and wind power cost models are presented in this paper in detail.
- The models of three facts devices (TCSC, TCPS, and SVC) are presented in this paper in detail.
- This paper proposes a meta-heuristic optimization technique known as hybrid gradient-based optimizer and moth-flame optimization algorithm (GBO-MFO) technique to minimize the generation cost, reduce the power losses, minimize the cost and power losses, and compare with three other techniques (GBO, MFO, SMA, and CFA).
- Four cases are studied in this paper with the following aims: minimizing the generation cost, reducing the power losses, minimizing the cost and power losses, and minimizing the cost and power losses with uncertain load demand.
- Three facts devices are incorporated in the IEEE 30-bus (TCSC, TCPS, and SVC), and the location and rating of three types of FACTS devices are optimized in case studies with objectives of minimizing cost and system real power loss.
2. Thermal Unit Fuel or Generating Costs
2.1. Wind Energy Cost Estimation
2.1.1. Wind Energy’s Direct Cost
2.1.2. Cost Analysis of Unreliable Wind Power
3. Modeling of FACTS Devices
3.1. Model of Thyristor-Controlled Series Compensator Phase Shifter (TCSC)
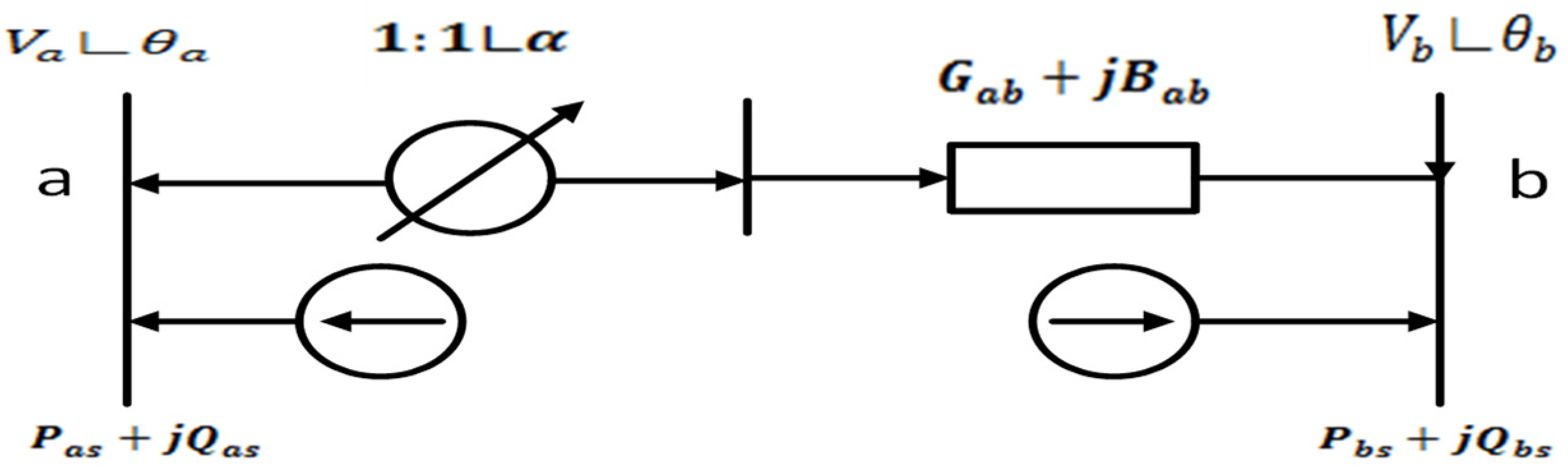
3.2. Model of Thyristor-Controlled Phase Shifter (TCPS)
3.3. The Model of Static var Compensator (SVC)
4. Objective of Optimization
- Total costs of generation
- Active power losses
- Voltage deviation
4.1. Equality and Inequality Constraints
4.1.1. Operational Equality Constraints
4.1.2. Operational Inequality Constraints
- Generator constraints:
- Transformer tap setting constraints:
- FACTS devices constraints:where , and are the numbers of FACTS devices.
5. Modified Moth–Flame Optimization and Gradient-Based Optimizer (GBO-MFO)
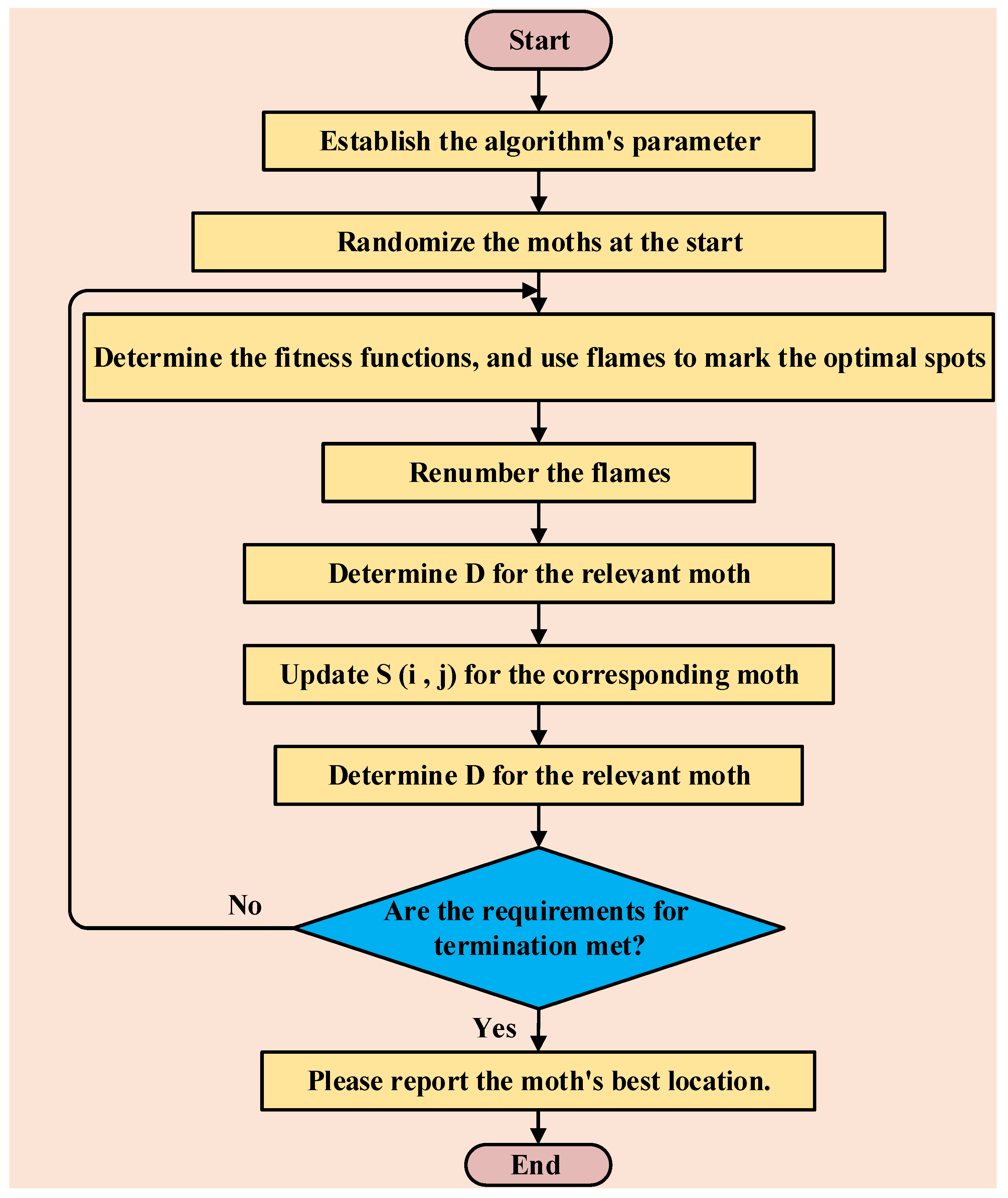
5.1. Moth–Flame Optimization (MFO) Algorithm
5.1.1. Creating the Initial Moth Population
5.1.2. Positions of the Moths Are Being Updated
- The moth should be the initial point on the spiral.
- The flame’s location should be the spiral’s termination point.
- The range of the spiral should not fluctuate beyond the search space.
5.1.3. Updating the Number of Flames
5.2. Gradient-Based Optimizer (GBO)
5.2.1. Initialization Process
5.2.2. Gradient Search Rule (GSR) Process
5.2.3. The Local Escaping Operator (LEO) Process
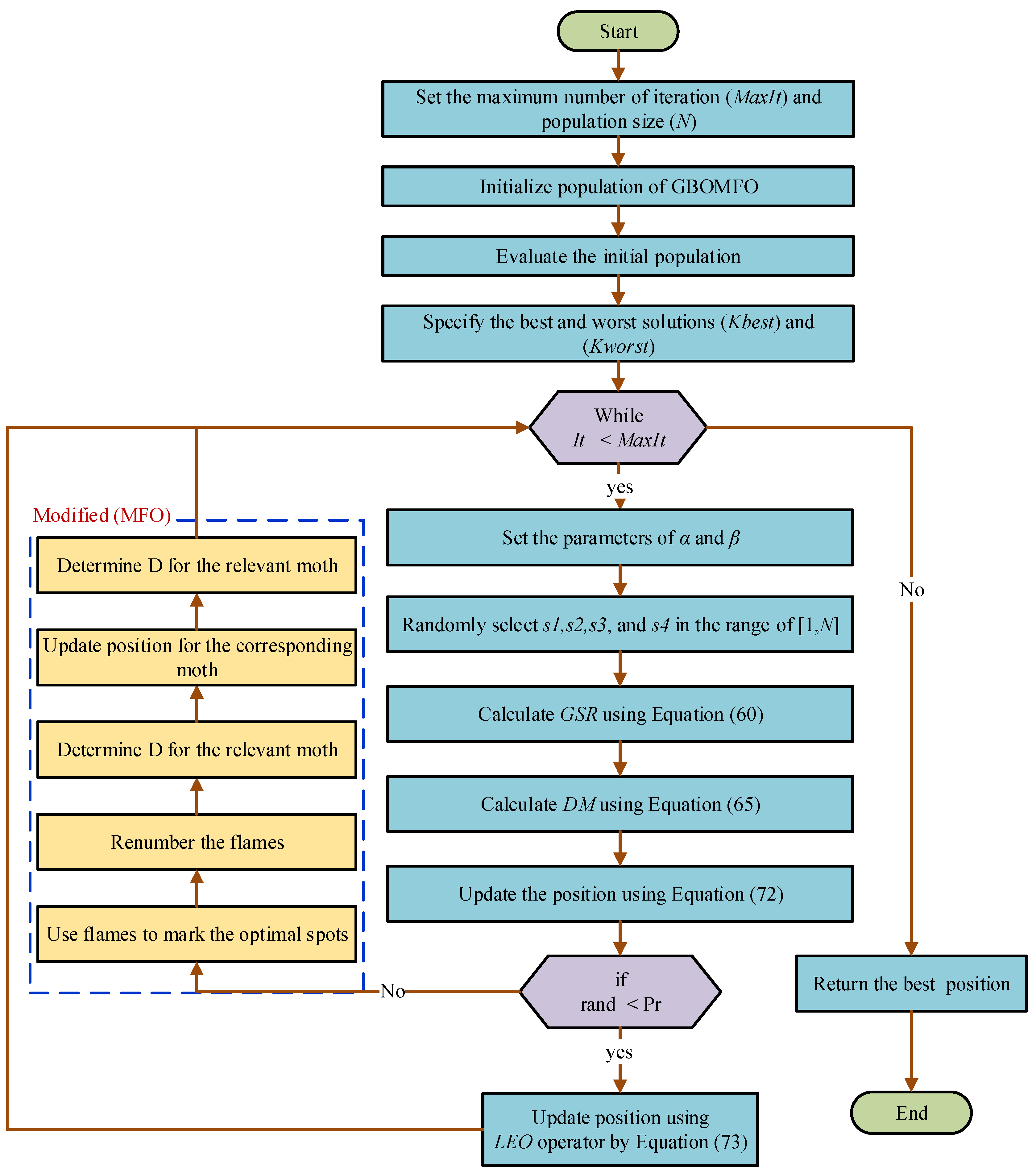
5.3. Proposed GBO-MFO Algorithm
6. Simulation Results and Discussion of the IEEE 30-Bus Test Network
- Case A: Minimizing the cost generation.
- Case B: Minimizing power losses.
- Case C: Minimizing cost and power losses.
- Case D: Load demand uncertainty
- Case A: Minimizing the Cost Generation
- Case B: Minimizing power losses
- Case C: Minimizing cost and power losses
- Case D: Load demand uncertainty
7. Discussion
8. Conclusions
9. Future Recommendation
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, K.; Park, Y.; Ortiz, J. A united approach to optimal real and reactive power dispatch. IEEE Trans. Power App. Syst. 1985, 104, 1147–1153. [Google Scholar] [CrossRef]
- Alsaç, O.; Bright, J.; Prais, M.; Stott, B. Further developments in LP-based optimal power flow. IEEE Trans. Power Syst. 1990, 5, 697–711. [Google Scholar] [CrossRef]
- Momoh, J.A.; El-Hawary, M.E.; Adapa, R. A review of selected optimal power flow literature to 1993. II. Newton, linear programming and interior point methods. IEEE Trans. Power Syst. 1999, 14, 105–111. [Google Scholar] [CrossRef]
- He, S.; Wen, J.Y.; Prempain, E.; Wu, Q.H.; Fitch, J.; Mann, S. An improved particle swarm optimization for optimal power flow. In Proceedings of the International Conference on Power System Technology (POWERCON), Singapore, 21–24 November 2004; pp. 1633–1637. [Google Scholar]
- Abido, M.A. Optimal power flow using tabu search algorithm. Electr. Power Compon. Syst. 2002, 30, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Quintana, V.H. Improving an interior-point-based off by dynamic adjustments of step sizes and tolerances. IEEE Trans. Power Syst. 1999, 14, 709–716. [Google Scholar]
- Olofsson, M.; Andersson, G.; Soder, L. Linear programming based optimal power flow using second order sensitivities. IEEE Trans. Power Syst. 1995, 10, 1691–1697. [Google Scholar] [CrossRef]
- Sun, D.I.; Ashley, B.; Brewer, B.; Hughes, A.; Tinney, W.F. Optimal power flow by Newton approach. IEEE Trans. Power App. Syst. 1984, PAS-103, 2864–2880. [Google Scholar] [CrossRef]
- Roy, P.K.; Paul, C. Optimal power flow using krill herd algorithm. Int. Trans. Electr. Energy Syst. 2015, 25, 1397–1419. [Google Scholar] [CrossRef]
- Mohamed, A.-A.A.; Mohamed, Y.S.; El-Gaafary, A.A.M.; Hemeida, A.M. Optimal power flow using moth swarm algorithm. Electr. Power Syst. Res. 2017, 142, 190–206. [Google Scholar] [CrossRef]
- Mahdad, B.; Srairi, K. Blackout risk prevention in a smart grid based flexible optimal strategy using Grey Wolf-pattern search algorithms. Energy Convers. Manag. 2015, 98, 411–429. [Google Scholar] [CrossRef]
- El-Fergany, A.; Hasanien, H.M. Salp swarm optimizer to solve optimal power flow comprising voltage stability analysis. Neural Comput. Appl. 2019, 32, 5267–5283. [Google Scholar] [CrossRef]
- Hassan, M.H.; Kamel, S.; Selim, A.; Khurshaid, T.; Domínguez-García, J.L. A modified Rao-2 algorithm for optimal power flow incorporating renewable energy sources. Mathematics 2021, 9, 1532. [Google Scholar] [CrossRef]
- Naderi, E.; Pourakbari-Kasmaei, M.; Cerna, F.V.; Lehtonen, M. A novel hybrid self-adaptive heuristic algorithm to handle single-and multi-objective optimal power flow problems. Int. J. Electr. Power Energy Syst. 2021, 125, 106492. [Google Scholar] [CrossRef]
- Abido, M.A. Optimal power flow using particle swarm optimization. Int. J. Electr. Power Energy Syst. 2002, 24, 563–571. [Google Scholar] [CrossRef]
- Roa-Sepulveda, C.A.; Pavez-Lazo, B.J. A solution to the optimal power flow using simulated annealing. Int. J. Electr. Power Energy Syst. 2003, 25, 47–57. [Google Scholar] [CrossRef]
- Bouktir, T.; Slimani, L.; Belkacemi, M. A genetic algorithm for solving the optimal power flow problem. Leonardo J. Sci. 2004, 4, 44–58. [Google Scholar]
- Mukherjee, A.; Mukherjee, V. Solution of optimal power flow using chaotic krill herd algorithm. Chaos Solitons Fract. 2015, 78, 10–21. [Google Scholar] [CrossRef]
- Kaymaz, E.; Duman, S.; Guvenc, U. Optimal power flow solution with stochastic wind power using the Lévy coyote optimization algorithm. Neural Comput. Appl. 2020, 33, 6775–6804. [Google Scholar] [CrossRef]
- Yunus, A.M.S.; Abu-Siada, A.; Mosaad, M.I.; Albalawi, H.; Aljohani, M.; Jin, J.X. Application of SMES Technology in Improving the Performance of a DFIG-WECS Connected to a Weak Grid. IEEE Access 2021, 9, 124541–124548. [Google Scholar] [CrossRef]
- Mosaad, M.I.; Alenany, A.; Abu-Siada, A. Enhancing the performance of wind energy conversion systems using unified power flow controller IET Generation. Transm. Distrib. 2020, 14, 1922–1929. [Google Scholar] [CrossRef]
- Panda, A.; Tripathy, M. Security constrained optimal power flow solution of wind-thermal generation system using modified bacteria foraging algorithm. Energy 2015, 93, 816–827. [Google Scholar] [CrossRef]
- Marley, J.F.; Vrakopoulou, M.; Hiskens, I.A. An AC-QP optimal power flow algorithm considering wind forecast uncertainty. In Proceedings of the Innovative Smart Grid Technologies-Asia (ISGT-Asia), Melbourne, Australia, 28 November–1 December 2016; pp. 317–323. [Google Scholar]
- Mosaad, M.I.; Ramadan, H.S.; Aljohani, M.; Sherif, M.F.E.; Ghoneim, S.S.M. Near-Optimal PI Controllers of STATCOM for Efficient Hybrid Renewable Power System. IEEE Access 2021, 9, 34119–34130. [Google Scholar] [CrossRef]
- Mosaad, M.I.; Sabiha, N.A. Ferroresonance Overvoltage Mitigation using STATCOM for Grid-Connected Wind Energy Conversion Systems. J. Mod. Power Syst. Clean Energy 2021, 1–9. [Google Scholar]
- Nusair, K.; Alasali, F.; Hayajneh, A.; Holderbaum, W. Optimal placement of FACTS devices and power-flow solutions for a power network system integrated with stochastic renewable energy resources using new metaheuristic optimization techniques. Int. J. Energy Res. 2021, 45, 18786–18809. [Google Scholar] [CrossRef]
- Rambabu, M.; Nagesh Kumar, G.V.; Sivanagaraju, S. Optimal power flow of integrated renewable energy system using a thyristor controlled SeriesCompensator and a grey-wolf algorithm. Energies 2019, 12, 2215. [Google Scholar] [CrossRef] [Green Version]
- Inkollu, S.R.; Kota, V.R. Optimal setting of FACTS devices for voltage stability improvement using PSO adaptive GSA hybrid algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 1166–1176. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, A.; Mukherjee, V. Solution of optimal power flow with FACTS devices using a novel oppositional krill herd algorithm. Int. J. Electr. Power Energy Syst. 2016, 78, 700–714. [Google Scholar] [CrossRef]
- Pandiarajan, K.; Babulal, C.K. Fuzzy Harmony search algorithm based optimal power flow for power system security enhancement. Int. J. Electr. Power Energy Syst. 2016, 78, 72–79. [Google Scholar] [CrossRef]
- Rao, B.V.; Nagesh-Kumar, G.V. Optimal power flow by BAT search algorithm for generation reallocation with unified power flow controller. Int. J. Electr.Power Energy Syst. 2015, 68, 81–88. [Google Scholar]
- Acharjee, P. Optimal power flow with UPFC using security constrained self a adaptive differential evolutionary algorithm for restructured power system. Int. J. Electr. Power Energy Syst. 2016, 76, 69–81. [Google Scholar] [CrossRef]
- Prasad, D.; Mukherjee, V. A novel symbiotic organism’s search algorithm for optimal power flow of power system with FACTS devices. Eng. Sci. Technol. Int. J. 2016, 19, 79–89. [Google Scholar]
- Rahman, J.; Feng, C.; Zhang, J. A learning-augmented approach for AC optimal power flow. Int. J. Electr. Power Energy Syst. 2021, 130, 106908. [Google Scholar] [CrossRef]
- Abd El-sattar, S.; Kamel, S.; Ebeed, M.; Jurado, F. An improved version of salp swarm algorithm for solving optimal power flow problem. Soft Comput. 2021, 25, 4027–4052. [Google Scholar] [CrossRef]
- Su, Q.; Khan, H.U.; Khan, I.; Choi, B.J.; Wu, F.; Aly, A.A. An optimized algorithm for optimal power flow based on deep learning. Energy Rep. 2021, 7, 2113–2124. [Google Scholar] [CrossRef]
- Shilaja, C. In Perspective of Combining Chaotic Particle Swarm Optimizer and Gravitational Search Algorithm Based on Optimal Power Flow in Wind Renewable Energy. In Soft Computing Techniques and Applications; Springer: Singapore, 2021; pp. 477–490. [Google Scholar]
- Ehsan, N.; Mahdi, P.; Hamdi, A. An efficient particle swarm optimization algorithm to solve optimal power flow problem integrated with FACTS devices. Appl. Soft Comput. J. 2019, 80, 243–262. [Google Scholar]
- Biswas, P.P.; Suganthan, P.N.; Amaratunga, G.A.J. Optimal power flow solutions incorporating stochastic wind and solar power. Energy Convers. Manag. 2017, 148, 1194–1207. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Qu, B.Y.; Amaratunga, G.A.J. Multiobjective economic-environmental power dispatch with stochastic wind-solar-small hydro power. Energy 2018, 150, 1039–1057. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Mallipeddi, R.; Amaratunga, G.A.J. Optimal power flow solutions using differential evolution algorithm integrated with effective constraint handling techniques. Eng. Appl. Artif. Intell. 2018, 68, 81–100. [Google Scholar] [CrossRef]
- Alsac, O.; Stott, B. Optimal Load Flow with Steady-State Security. IEEE Trans. Power Appar. Syst. 1974, PAS-93, 745–751. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Premkumar, M.; Jangir, P.; Ramakrishnan, C.; Nalinipriya, G.; Alhelou, H.H.; Kumar, B.S. Identification of solar photovoltaic model parameters using an improved gradient-based optimization algorithm with chaotic drifts. IEEE Access 2021, 9, 62347–62379. [Google Scholar] [CrossRef]
- Rajeshkumar, G.; Sujatha, T.P. Optimal positioning and sizing of distributed generators using hybrid MFO-WC algorithm. J. Comput. Mech. Power Syst. Control 2019, 2, 19–27. [Google Scholar] [CrossRef]
- Zimmerman, R.D.; Murillo-Sánchez, C.E. Matpower (Version 7.0). 2019. Available online: https://matpower.org (accessed on 10 December 2021).
- Li, S.; Chen, H.; Wang, M.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Aghaei, J.; Akbari, E.; Li, L. CFA optimizer: A new and powerful algorithm inspired by Franklin’s and Coulomb’s laws theory for solving the economic load dispatch problems. Int. Trans. Electr. Energy Syst. 2018, 28, e2536. [Google Scholar]
- Mohseni-Bonab, S.M.; Rabiee, A.; Mohammadi-Ivatloo, B. Voltage stability constrained multi-objective optimal reactive power dispatch under load and wind power uncertainties: A stochastic approach. Renew. Energy 2016, 85, 598–609. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.N.; Mallipeddi, R.; Amaratunga, G.A.J. Optimal reactive power dispatch with uncertainties in load demand and renewable energy sources adopting scenario-based approach. Appl. Soft Comput. 2019, 75, 616–632. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Generator | Location | a ($/h) | b ($/MWh) | c ($/MW2h) | d ($/h) | e (rad/MW) |
|---|---|---|---|---|---|---|
| (TG1) | 1 | 0 | 2 | 0.00375 | 18 | 0.0375 |
| (TG2) | 2 | 0 | 1.75 | 0.0175 | 16 | 0.038 |
| (TG8) | 8 | 0 | 3.25 | 0.00834 | 12 | 0.045 |
| (TG13) | 13 | 0 | 3 | 0.025 | 13.5 | 0.041 |
| Control Variable | Minimum | Maximum | Case A | Case B | Case C |
|---|---|---|---|---|---|
| 20 | 80 | 40.36711 | 25.17703 | 39.96882 | |
| 0 | 75 | 49.60228 | 74.99606 | 74.99998 | |
| 10 | 35 | 10.00001 | 34.99992 | 34.99953 | |
| 0 | 60 | 42.08583 | 59.99999 | 60 | |
| 12 | 40 | 12.00002 | 39.99076 | 25.3085 | |
| 0.95 | 1.10 | 1.077394 | 1.055951 | 1.05933 | |
| 0.95 | 1.10 | 1.062138 | 1.050173 | 1.054368 | |
| 0.95 | 1.10 | 1.039988 | 1.039544 | 1.045164 | |
| 0.95 | 1.10 | 1.040376 | 1.045106 | 1.0472 | |
| 0.95 | 1.10 | 1.094419 | 1.095728 | 1.096266 | |
| 0.95 | 1.10 | 1.054076 | 1.080656 | 1.068085 | |
| 0.90 | 1.10 | 0.998881 | 1.02985 | 1.010771 | |
| 0.90 | 1.10 | 0.974578 | 0.942647 | 0.989468 | |
| 0.90 | 1.10 | 0.970168 | 1.011504 | 1.006795 | |
| 0.90 | 1.10 | 0.98209 | 0.978315 | 0.987358 | |
| FACTS ratings | |||||
| 0 | 50% | 0.261798 | 0.499378 | 0.260031 | |
| 0 | 50% | 0.256903 | 0.180707 | 0.499985 | |
| −5 | 5 | 2.891543 | 4.606817 | 2.906457 | |
| −5 | 5 | −0.07969 | −2.38928 | −0.99951 | |
| −10 | 10 | 9.998593 | 5.468421 | 9.441854 | |
| −10 | 10 | 9.967787 | 9.980042 | 9.999946 | |
| FACTS locations | |||||
| TCSC1 Branch | 1 | 40 | 5 | 34 | 2 |
| TCSC2 Branch | 1 | 41 | 2 | 41 | 9 |
| TCPS1 Branch | 1 | 40 | 14 | 35 | 33 |
| TCPS2 Branch | 1 | 41 | 39 | 14 | 5 |
| SVC1 Bus | 3 | 29 | 7 | 19 | 24 |
| SVC2 Bus | 3 | 30 | 24 | 24 | 21 |
| Parameters | |||||
| 50 | 200 | 134.9094224 | 50.0016021 | 49.9999977 | |
| 20 - | 150 | 5.7579908 | −3.37055433 | −2.3974411 | |
| 20 - | 60 | 19.0386182 | 9.216845035 | 9.67332152 | |
| 30 - | 35 | 19.5321975 | 21.38442996 | 22.2010301 | |
| −15 | 48.7 | 34.73924937 | 31.42417937 | 31.0560877 | |
| −25 | 30 | 24.97840417 | 27.42443353 | 27.6472454 | |
| −15 | 44.7 | 9.24650880 | 25.99634823 | 17.2964094 | |
| Objective function | |||||
| 807.120060 | 939.3285458 | 916.651707 | |||
| 5.56466263 | 1.76537072 | 1.87682289 | |||
| 1363.586323 | 1115.86561 | 1104.33400 | |||
| 0.6622278 | 0.862291816 | 0.83473561 | |||
| Emission | 0.213568466 | 0.141615940 | 0.14196922 | ||
| Algorithms | The Control Parameter |
|---|---|
| Common parameters | Number of population size = 200 |
| Iterations number = 500 | |
| Dimensions number = 27 | |
| Number of runs = 20 | |
| GBO-MFO | b = 1 and a decreases linearly from −1 to −2 (Default), pr = 0.5 |
| MFO | b = 1 and a decreases linearly from −1 to −2 (Default) |
| GBO | pr = 0.5 |
| CFA | Pc and the value equal to 0.5 |
| SMA | (vb) is a parameter with a range of (−a, a) and gradually approaches zero as the iterations increase. The value of oscillates between (−1, 1) and tends to zero eventually. |
| Technique | SMA | CFA | GBO-MFO | GBO | MFO | |
|---|---|---|---|---|---|---|
| Case A | 807.277 | 807.4699193 | 807.12006 | 807.2502 | 807.4733 | |
| 5.5798 | 5.628556222 | 5.56466263 | 5.6002 | 5.6304 | ||
| 1.370 × 103 | 1370.325541 | 1363.586323 | 1367.3 | 1.370 × 103 | ||
| 0.8747 | 0.75741542 | 0.6622278 | 0.8514 | 0.6534 | ||
| Emission | 0.2136 | 0.21360518 | 0.213568466 | 0.2136 | 0.2136 | |
| Case B | 936.6358 | 939.30095 | 939.3285458 | 938.649 | 1.120 × 103 | |
| 1.8149 | 1.796401 | 1.76537072 | 1.7717 | 1.8102 | ||
| 1.120 × 103 | 1118.941 | 1115.86561 | 1115.8 | 1.120 × 103 | ||
| 0.8391 | 0.82594 | 0.862291816 | 0.8927 | 0.8551 | ||
| Emission | 0.1414 | 0.14157 | 0.141615939 | 0.1416 | 0.1416 | |
| Case C | 918.7776 | 916.62101 | 916.651707 | 918.4229 | 918.0247 | |
| 1.8602 | 1.90008 | 1.876822891 | 1.8608 | 1.9179 | ||
| 1104.8 | 1106.65064 | 1104.334003 | 1104.5 | 1109.8 | ||
| 0.9109 | 0.85175 | 0.834735606 | 0.9166 | 0.8610 | ||
| Emission | 0.1416 | 0.1416933 | 0.141969216 | 0.1417 | 0.1418 |
| Loading Scenario | ||
|---|---|---|
| SCA | 54.749 | 0.15866 |
| SCB | 0.15866 | 0.34134 |
| SCC | 74.599 | 0.34134 |
| SCD | 85.251 | 0.15866 |
| Algortihms | Case 1 | Case 2 | Case 3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| R+ | R− | p-Value | H0 | R+ | R− | p-Value | H0 | R+ | R− | p-Value | H0 | |
| GBO-MFO vs. GBO | 141 | 69 | 1.79 × 10−1 | Yes | 74 | 136 | 2.47 × 10−1 | Yes | 133 | 77 | 2.96 × 10−1 | Yes |
| GBO-MFO vs. MFO | 179 | 31 | 5.73 × 10−3 | No | 190 | 20 | 1.51 × 10−3 | No | 206 | 4 | 1.63 × 10−4 | No |
| GBO-MFO vs. CFA | 166 | 44 | 2.28 × 10−2 | No | 159 | 51 | 4.38 × 10−2 | No | 183 | 27 | 3.59 × 10−3 | No |
| GBO-MFO vs. SMA | 186 | 24 | 2.49 × 10−3 | No | 183 | 27 | 3.59 × 10−3 | No | 92 | 118 | 6.27 × 10−1 | Yes |
| Control Variable | Scenario A | Scenario B | Scenario C | Scenario D |
|---|---|---|---|---|
| PTG 2 (MW) | 20 | 20 | 20.22 | 22.756 |
| PWG 5 (MW) | 36.9422 | 52.126 | 62.24 | 73.61 |
| PTG 8 (MW) | 10 | 10.9434 | 20.83 | 28.769 |
| PWG 11 (MW) | 27.19 | 41.31 | 47.29 | 52.04 |
| PTG 13 (MW) | 12 | 12 | 12 | 15.81 |
| V1 (p. u) | 1.057 | 1.056 | 1.0594 | 1.058 |
| V2 (p. u) | 1.052 | 1.0507 | 1.0539 | 1.053 |
| V5 (p. u) | 1.044 | 1.044 | 1.0470 | 1.047 |
| V11 (p. u) | 1.045 | 1.042 | 1.0473 | 1.047 |
| V12 (p. u) | 1.0629 | 1.07 | 1.0641 | 1.095 |
| V13 (p. u) | 1.061168 | 1.062836 | 1.065 | 1.067 |
| T11 (p. u) | 1.042204 | 0.990643 | 1.0085 | 1.055 |
| T12 (p. u) | 0.949792 | 0.969312 | 0.9837 | 0.908 |
| T15 (p. u) | 0.992094 | 1.000278 | 1.0099 | 0.9944 |
| T36 (p. u) | 0.987191 | 0.984462 | 0.98495 | 0.986 |
| FACTS ratings | ||||
| 0.219086 | 0.219927 | 0.136841 | 0.844894 | |
| 0.063736 | 0.222954 | 0.446708 | 2.262013 | |
| 1.174577 | 1.763584 | 2.946295 | 0.132565 | |
| −4.85577 | 1.061893 | 0.170417 | 0.485028 | |
| 2.837804 | 7.110695 | 9.916534 | 7.510003 | |
| 8.046143 | 6.707114 | 6.721043 | 9.988798 | |
| FACTS locations | ||||
| TCSC1 Branch | 14 | 14 | 14 | 11 |
| TCSC2 Branch | 23 | 23 | 23 | 33 |
| TCPS1 Branch | 24 | 24 | 24 | 22 |
| TCPS2 Branch | 41 | 41 | 41 | 39 |
| SVC1 Bus | 21 | 21 | 21 | 7 |
| SVC2 Bus | 24 | 24 | 24 | 24 |
| Parameters | ||||
| PTG 1 (MW) | 50 | 50 | 50 | 50 |
| QTG 1 (MVAr) | −2.57 | −2.04 | −1.66 | −2.04 |
| QTG 2 (MVAr) | 2.76 | 5.51 | 7.38 | 5.65 |
| QWG 5 (MVAr) | 10.76 | 11.40 | 15.95 | 15.52 |
| QTG 8 (MVAr) | 14.22 | 19.46 | 25.62 | 24.52 |
| QWG 11 (MVAr) | 12.68 | 12.56 | 9.34 | 29.89 |
| QTG 13 (MVAr) | 8.56 | 11.96 | 12.37 | 14.62 |
| Objective function | ||||
| 418.1275 | 520.6703 | 624.6884 | 749.3056 | |
| 0.9748 | 1.0649 | 1.1673 | 1.3674 | |
| 515.6028 | 627.1640 | 741.4172 | 886.0478 886.0478 | |
| 1.0190 | 0.9441 | 0.9822 | 0.9400 | |
| Emission | 0.1547 | 0.1 544 | 0.1525 | 0.1491 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, A.A.; Kamel, S.; Hassan, M.H.; Mosaad, M.I.; Aljohani, M. Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power. Mathematics 2022, 10, 361. https://doi.org/10.3390/math10030361
Mohamed AA, Kamel S, Hassan MH, Mosaad MI, Aljohani M. Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power. Mathematics. 2022; 10(3):361. https://doi.org/10.3390/math10030361
Chicago/Turabian StyleMohamed, Amal Amin, Salah Kamel, Mohamed H. Hassan, Mohamed I. Mosaad, and Mansour Aljohani. 2022. "Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power" Mathematics 10, no. 3: 361. https://doi.org/10.3390/math10030361
APA StyleMohamed, A. A., Kamel, S., Hassan, M. H., Mosaad, M. I., & Aljohani, M. (2022). Optimal Power Flow Analysis Based on Hybrid Gradient-Based Optimizer with Moth–Flame Optimization Algorithm Considering Optimal Placement and Sizing of FACTS/Wind Power. Mathematics, 10(3), 361. https://doi.org/10.3390/math10030361