
Image Reconstruction Algorithm Using Weighted Mean of Ordered-Subsets EM and MART for Computed Tomography

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminary
3. Results
3.1. Proposed Method
- Weighted geometric mean:
- Weighted hybrid mean:
3.2. Theoretical Findings
- Discrete-time systems:
- Continuous-time systems:
3.3. Fast Discretization Algorithm
3.4. Time Varying System
4. Experiments and Discussion
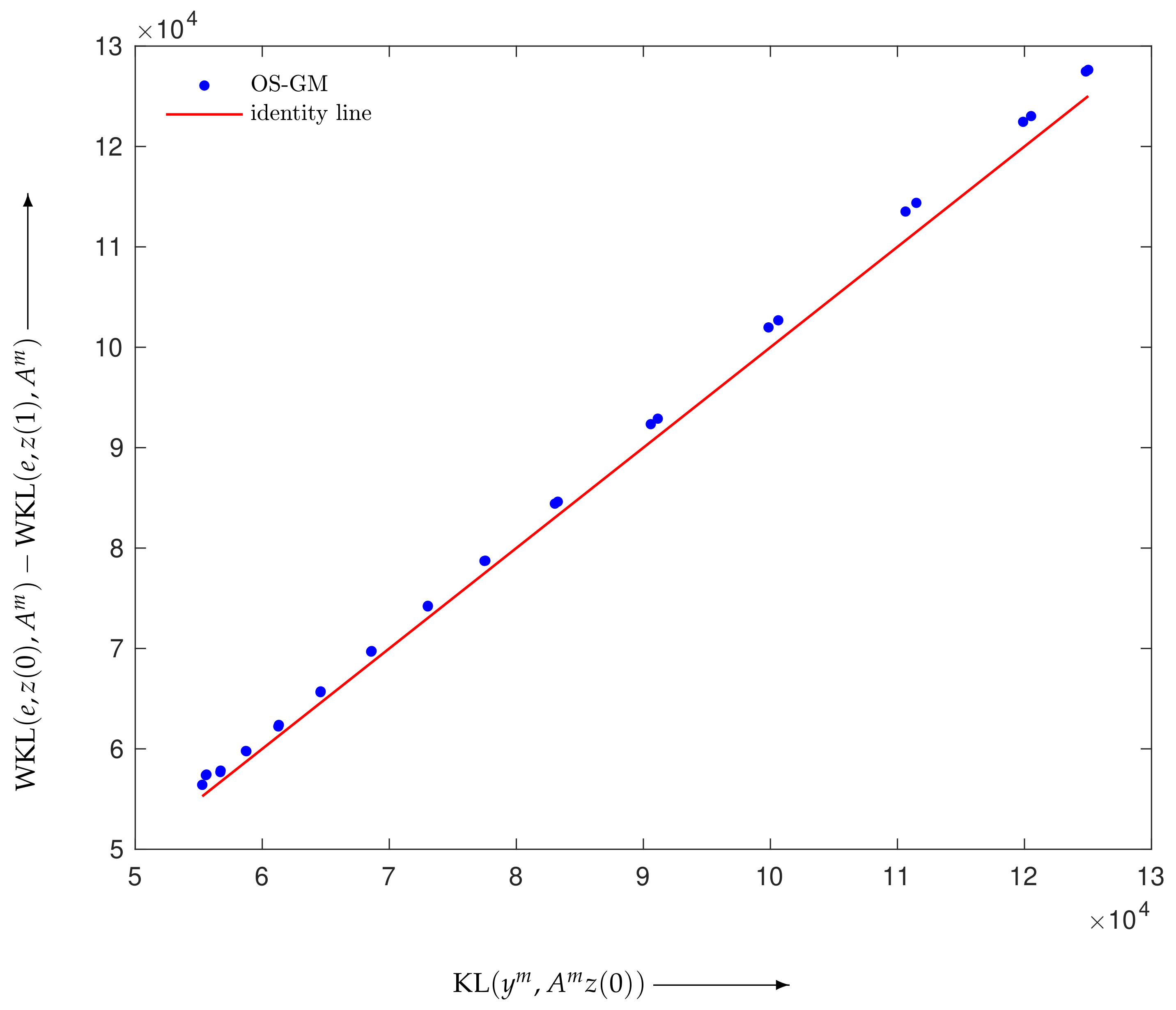
4.1. Verification of Theory
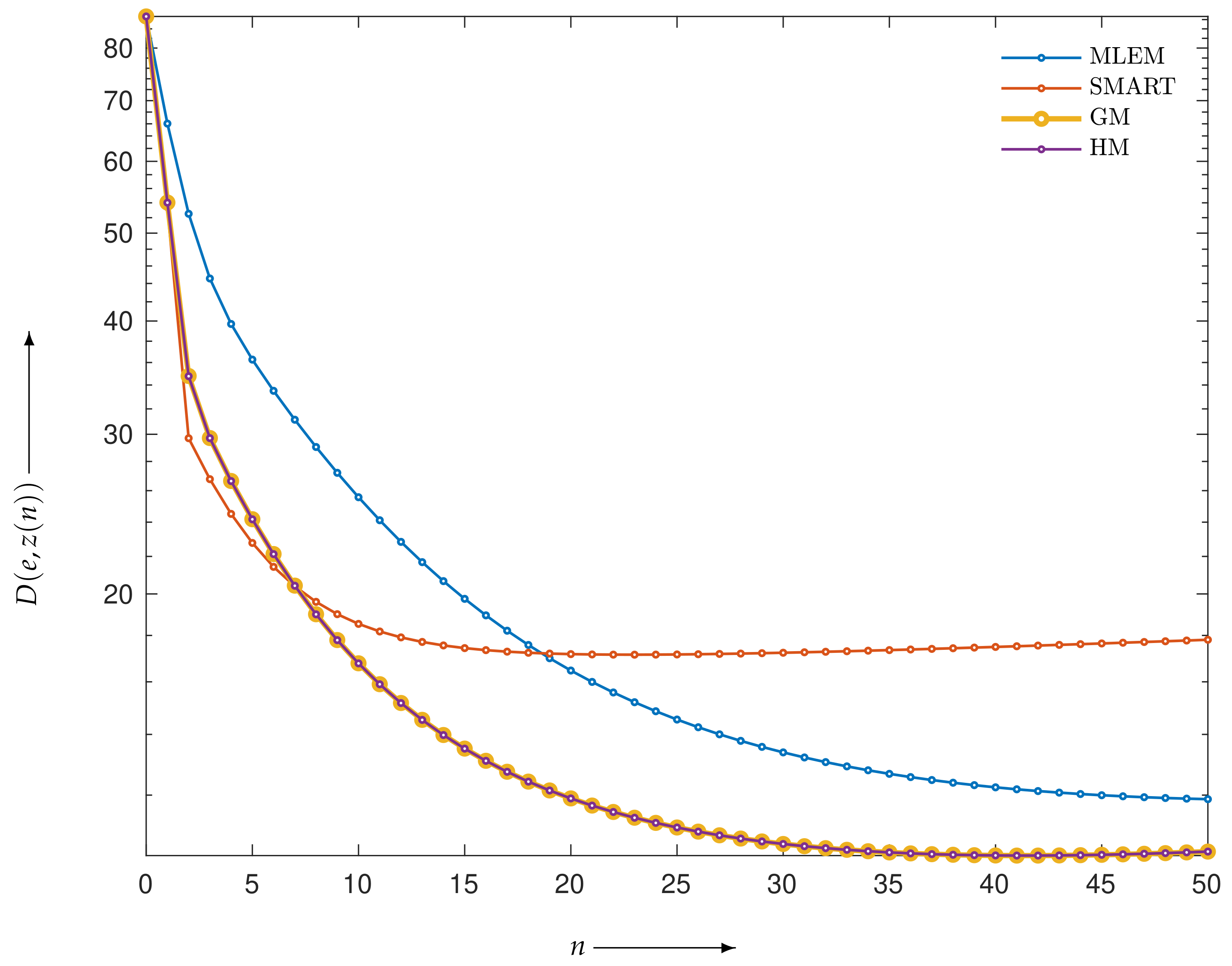
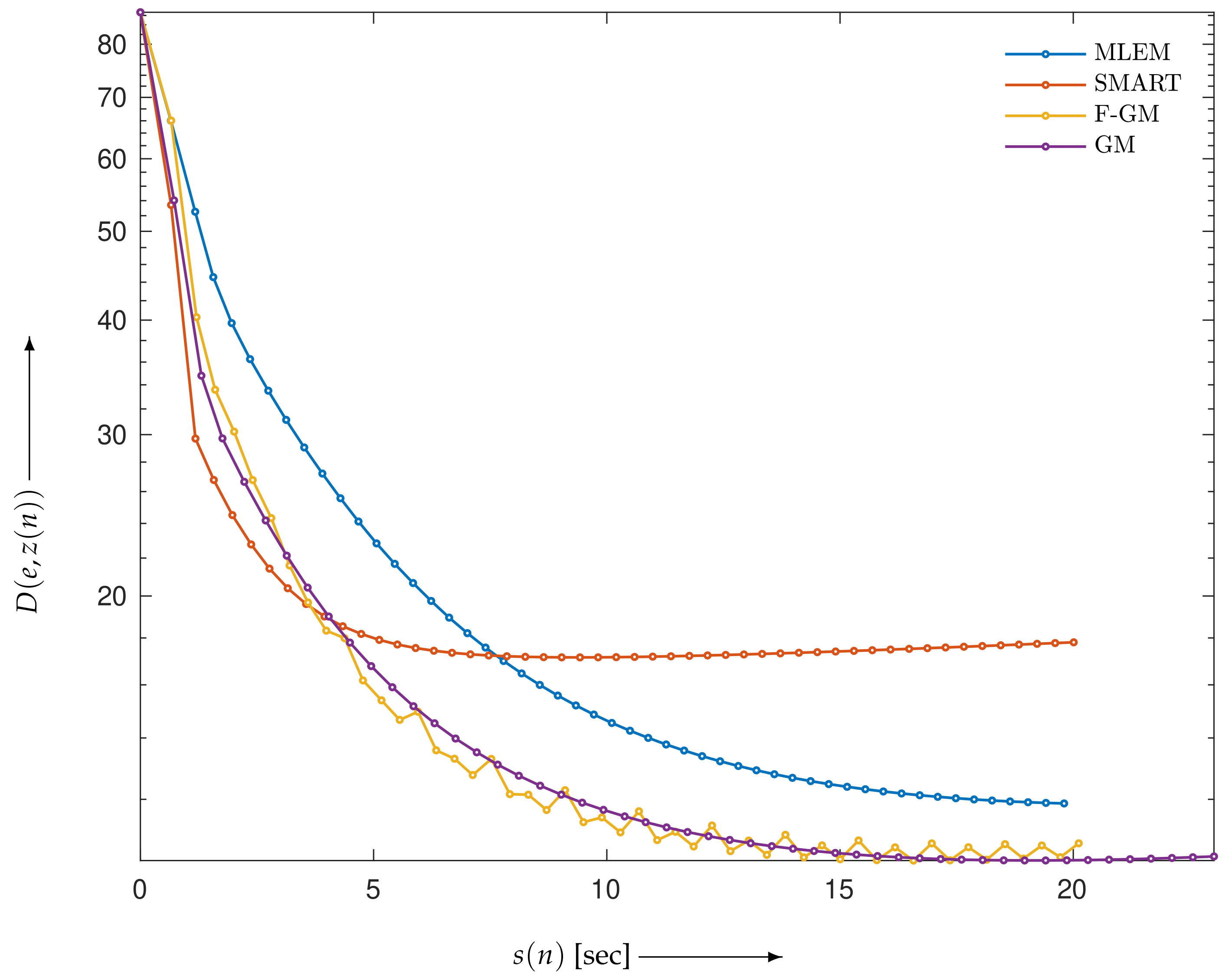
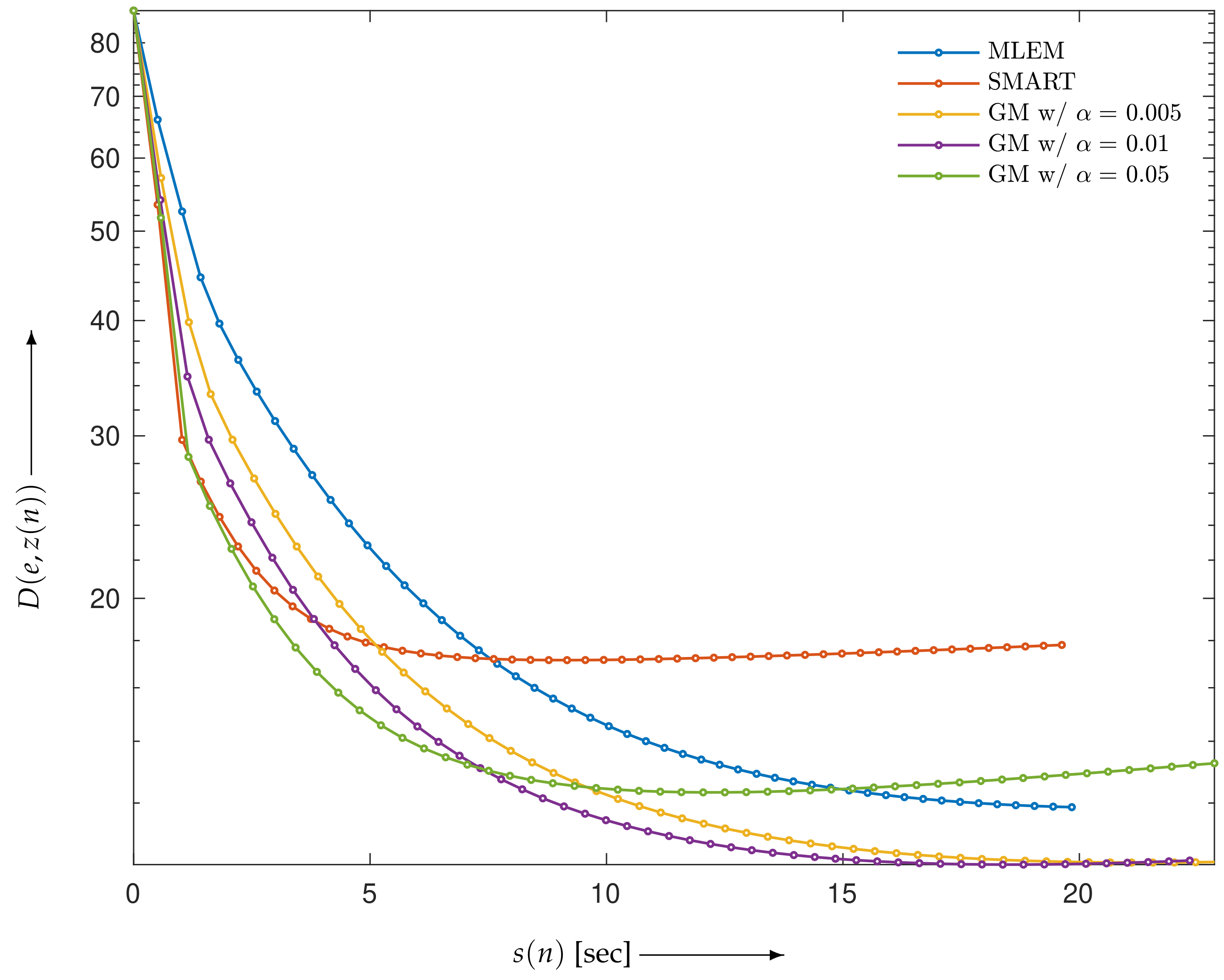
4.2. Evaluation of Reconstructed Images
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ramachandran, G.N.; Lakshminarayanan, A.V. Three-dimensional reconstruction from radiographs and electron micrographs: Application of convolutions instead of Fourier transforms. Proc. Natl. Acad. Sci. USA 1971, 68, 2236–2240. [Google Scholar] [CrossRef] [PubMed]
- Shepp, L.A.; Vardi, Y. Maximum likelihood reconstruction for emission tomography. IEEE Trans. Med. Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Lewitt, R.M. Reconstruction algorithms: Transform methods. Proc. IEEE 1983, 71, 390–408. [Google Scholar] [CrossRef]
- Natterer, F. Computerized tomography. In The Mathematics of Computerized Tomography; Springer: Berlin/Heidelberg, Germany, 1986; pp. 1–8. [Google Scholar]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; IEEE Press: Piscataway, NJ, USA, 1988. [Google Scholar]
- Stark, H. Image Recovery: Theory and Application; Academic Press: Washington, DC, USA, 1987. [Google Scholar]
- Hudson, H.M.; Larkin, R.S. Accelerated image reconstruction using ordered subsets of projection data. IEEE Trans. Med. Imaging 1994, 13, 601–609. [Google Scholar] [CrossRef] [PubMed]
- Gordon, R.; Bender, R.; Herman, G.T. Algebraic reconstruction techniques (ART) for three-dimensional electron microscopy and X-ray photography. J. Theor. Biol. 1970, 29, 471–481. [Google Scholar] [CrossRef]
- Fessler, J.A.; Hero, A.O. Penalized maximum-likelihood image reconstruction using space-alternating generalized EM algorithms. IEEE Trans. Image Process. 1995, 4, 1417–1429. [Google Scholar] [CrossRef]
- Byrne, C.L. Accelerating the EMML algorithm and related iterative algorithms by rescaled block-iterative methods. IEEE Trans. Image Process. 1998, 7, 100–109. [Google Scholar] [CrossRef]
- DoSik, H.; Gengsheng, Z.L. Convergence study of an accelerated ML-EM algorithm using bigger step size. Phys. Med. Biol. 2006, 51, 237–252. [Google Scholar]
- Darroch, J.; Ratcliff, D. Generalized iterative scaling for log-linear models. Ann. Math. Stat. 1972, 43, 1470–1480. [Google Scholar] [CrossRef]
- Schmidlin, P. Iterative separation of sections in tomographic scintigrams. J. Nucl. Med. 1972, 11, 1–16. [Google Scholar] [CrossRef]
- Badea, C.; Gordon, R. Experiments with the nonlinear and chaotic behaviour of the multiplicative algebraic reconstruction technique (MART) algorithm for computed tomography. Phys. Med. Biol. 2004, 49, 1455–1474. [Google Scholar] [CrossRef]
- Byrne, C.L. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103–120. [Google Scholar] [CrossRef]
- Gustavsson, B. Tomographic inversion for ALIS noise and resolution. J. Geophys. Res. Space Phys. 1998, 103, 26621–26632. [Google Scholar] [CrossRef]
- Jiang, W.; Zhang, X. Relaxation Factor Optimization for Common Iterative Algorithms in Optical Computed Tomography. Math. Probl. Eng. 2017, 2017, 4850317. [Google Scholar] [CrossRef]
- Schropp, J. Using dynamical systems methods to solve minimization problems. Appl. Numer. Math. 1995, 18, 321–335. [Google Scholar] [CrossRef]
- Airapetyan, R.G.; Ramm, A.G.; Smirnova, A.B. Continuous analog of gauss-newton method. Math. Model. Methods Appl. Sci. 1999, 9, 463–474. [Google Scholar] [CrossRef]
- Airapetyan, R.G.; Ramm, A.G. Dynamical systems and discrete methods for solving nonlinear ill-posed problems. In Applied Mathematics Reviews; GA, A., Ed.; World Scientific Publishing Company: Singapore, 2000; Volume 1, pp. 491–536. [Google Scholar]
- Airapetyan, R.G.; Ramm, A.G.; Smirnova, A.B. Continuous methods for solving nonlinear ill-posed problems. In Operator Theory and Its Applications; Ramm, A.G., Shivakumar, P.N., Vilgelmovich Strauss, A., Eds.; American Mathematical Society: Providence, RI, USA, 2000; Volume 25, pp. 111–136. [Google Scholar]
- Ramm, A.G. Dynamical systems method for solving operator equations. Commun. Nonlinear Sci. Numer. Simul. 2004, 9, 383–402. [Google Scholar] [CrossRef]
- Li, L.; Han, B. A dynamical system method for solving nonlinear ill-posed problems. Appl. Math. Comput. 2008, 197, 399–406. [Google Scholar] [CrossRef]
- Fujimoto, K.; Abou Al-Ola, O.M.; Yoshinaga, T. Continuous-time image reconstruction using differential equations for computed tomography. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 1648–1654. [Google Scholar] [CrossRef]
- Abou Al-Ola, O.M.; Fujimoto, K.; Yoshinaga, T. Common Lyapunov function based on Kullback–Leibler divergence for a switched nonlinear system. Math. Probl. Eng. 2011, 2011, 723509. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Fujimoto, K.; Abou Al-Ola, O.M.; Yoshinaga, T. Continuous-time image reconstruction for binary tomography. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2081–2087. [Google Scholar] [CrossRef]
- Tateishi, K.; Yamaguchi, Y.; Abou Al-Ola, O.M.; Yoshinaga, T. Continuous Analog of Accelerated OS-EM Algorithm for Computed Tomography. Math. Probl. Eng. 2017, 2017, 1564123. [Google Scholar] [CrossRef]
- Kasai, R.; Yamaguchi, Y.; Kojima, T.; Yoshinaga, T. Tomographic Image Reconstruction Based on Minimization of Symmetrized Kullback-Leibler Divergence. Math. Probl. Eng. 2018, 2018, 8973131. [Google Scholar] [CrossRef]
- Kasai, R.; Yamaguchi, Y.; Kojima, T.; Abou Al-Ola, O.M.; Yoshinaga, T. Noise-Robust Image Reconstruction Based on Minimizing Extended Class of Power-Divergence Measures. Entropy 2021, 23, 1005. [Google Scholar] [CrossRef] [PubMed]
- Lyapunov, A.M. Stability of Motion; Academic Press: New York, NY, USA, 1966. [Google Scholar]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Byrne, C.L. Iterative image reconstruction algorithms based on cross-entropy minimization. IEEE Trans. Image Process. 1993, 2, 96–103. [Google Scholar] [CrossRef]
- Byrne, C.L. Block-iterative algorithms. Int. Trans. Oper. Res. 2009, 16, 427–463. [Google Scholar] [CrossRef]
- Tateishi, K.; Yamaguchi, Y.; Abou Al-Ola, O.M.; Kojima, T.; Yoshinaga, T. Continuous analog of multiplicative algebraic reconstruction technique for computed tomography. In Proceedings of the SPIE, Medical Imaging 2016; SPIE Medical Imaging: San Diego, CA, USA, 2016; Volume 9783-4Q. [Google Scholar]
- Aniszewska, D. Multiplicative Runge–Kutta methods. Nonlinear Dyn. 2007, 50, 265–272. [Google Scholar] [CrossRef]
- Bashirov, A.E.; Kurpinar, E.M.; Oezyapici, A. Multiplicative calculus and its applications. J. Math. Anal. Appl. 2008, 337, 36–48. [Google Scholar] [CrossRef]
- Jeffreys, H. Theory of Probability; Clarendon Press: Oxford, UK, 1939. [Google Scholar]
- Jeffreys, H. An invariant form for the prior probability in estimation problems. R. Soc. Lond. 1946, 186, 453–461. [Google Scholar]
- Ishikawa, K.; Yamaguchi, Y.; Abou Al-Ola, O.M.; Kojima, T.; Yoshinaga, T. Block-Iterative Reconstruction from Dynamically Selected Sparse Projection Views Using Extended Power-Divergence Measure. Entropy 2022, 24, 740. [Google Scholar] [CrossRef]
- Tiwari, S.; Srivastava, R. A Hybrid-Cascaded Iterative Framework for Positron Emission Tomography and Single-Photon Emission Computed Tomography Image Reconstruction. J. Med. Imaging Health Inform. 2016, 6, 1001–1012. [Google Scholar] [CrossRef]
- Kazantsev, I.G.; Matej, S.; Lewitt, R.M. Optimal Ordering of Projections using Permutation Matrices and Angles between Projection Subspaces. Electron. Notes Discret. Math. 2005, 20, 205–216. [Google Scholar] [CrossRef]
- Van Dijke, M.C. Iterative Methods in Image Reconstruction. Ph.D. Thesis, Rijksuniversiteit Utrecht, Utrecht, The Netherlands, 1992. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abou Al-Ola, O.M.; Kasai, R.; Yamaguchi, Y.; Kojima, T.; Yoshinaga, T. Image Reconstruction Algorithm Using Weighted Mean of Ordered-Subsets EM and MART for Computed Tomography. Mathematics 2022, 10, 4277. https://doi.org/10.3390/math10224277
Abou Al-Ola OM, Kasai R, Yamaguchi Y, Kojima T, Yoshinaga T. Image Reconstruction Algorithm Using Weighted Mean of Ordered-Subsets EM and MART for Computed Tomography. Mathematics. 2022; 10(22):4277. https://doi.org/10.3390/math10224277
Chicago/Turabian StyleAbou Al-Ola, Omar M., Ryosuke Kasai, Yusaku Yamaguchi, Takeshi Kojima, and Tetsuya Yoshinaga. 2022. "Image Reconstruction Algorithm Using Weighted Mean of Ordered-Subsets EM and MART for Computed Tomography" Mathematics 10, no. 22: 4277. https://doi.org/10.3390/math10224277
APA StyleAbou Al-Ola, O. M., Kasai, R., Yamaguchi, Y., Kojima, T., & Yoshinaga, T. (2022). Image Reconstruction Algorithm Using Weighted Mean of Ordered-Subsets EM and MART for Computed Tomography. Mathematics, 10(22), 4277. https://doi.org/10.3390/math10224277