
Kinematic Modes Identification and Its Intelligent Control of Micro-Nano Particle Manipulated by Acoustic Signal





Abstract
1. Introduction
2. Particle Kinematic Modes
2.1. Identification of The Modes
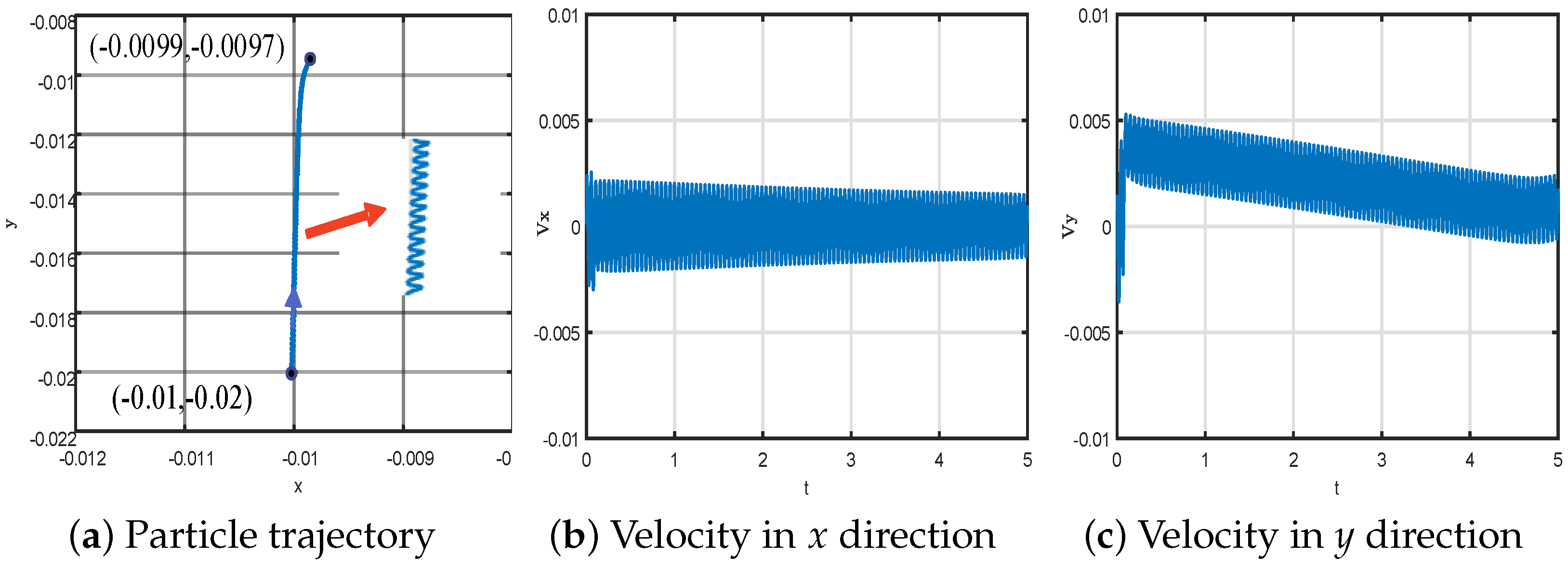
2.2. Simulations Analysis
3. Dynamics of the Particle
4. Particle Trajectory Control Based on Ladrc
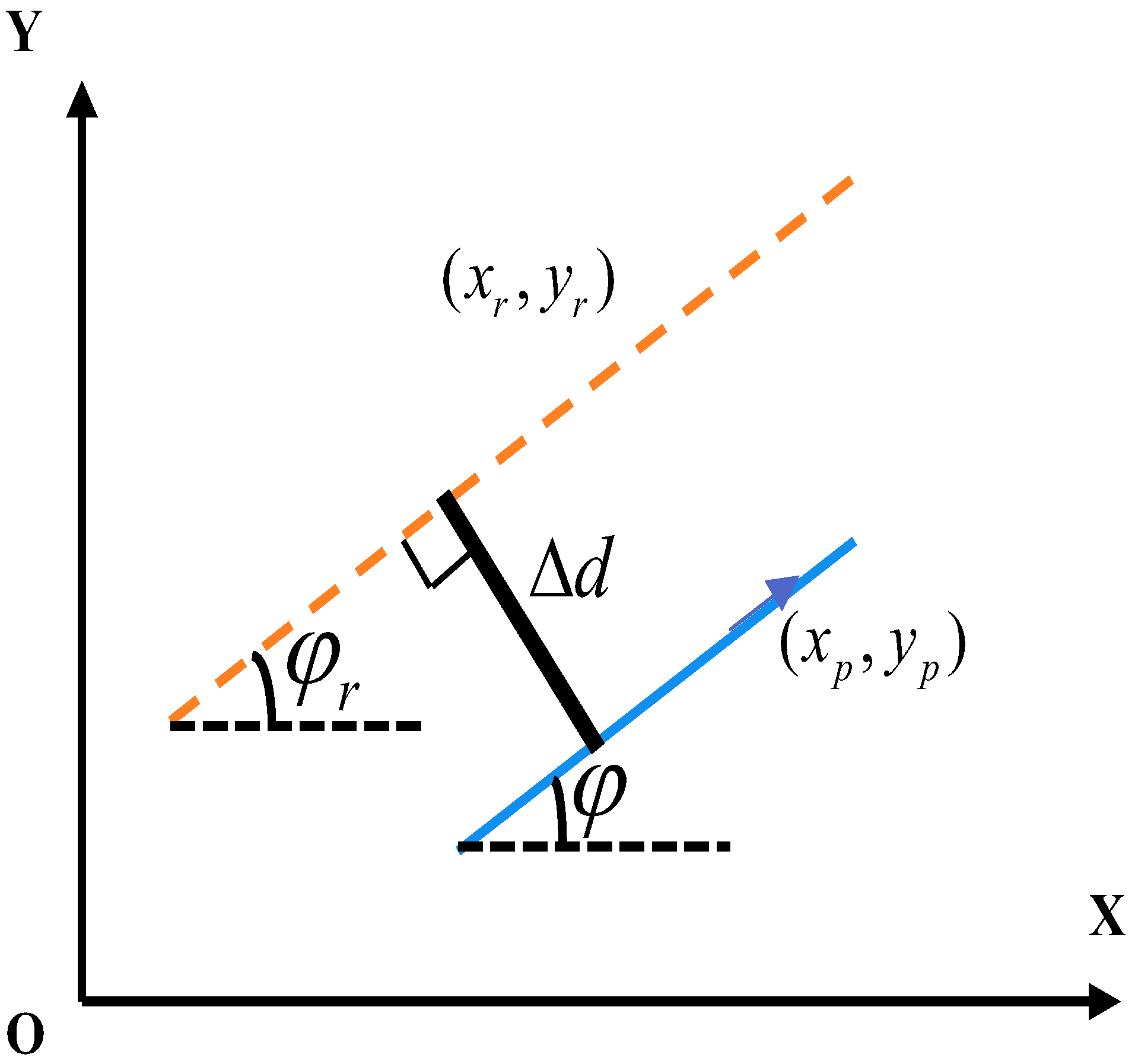
4.1. Control Algorithm and Mechanism
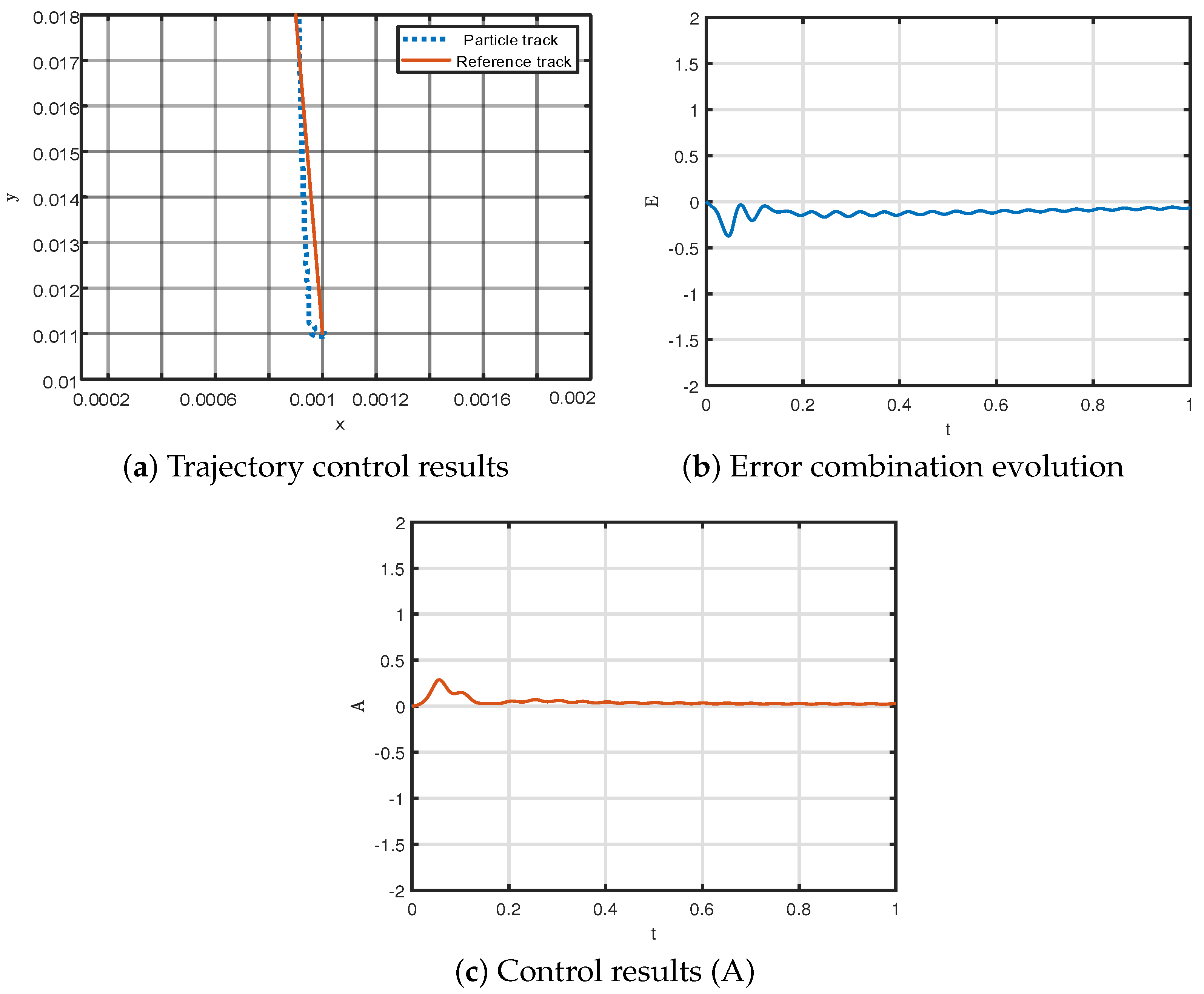
4.2. Control Results Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Utadiya, S.; Joshi, S.; Patel, N.; Patel, C.; Joglekar, M.; Cahhniwal, V.; O’Connor, T.; Javidi, B.; An, A. Integrated self-referencing single shot digital holographic microscope and optical tweezer. Light. Adv. Manuf. 2022, 3, 37. [Google Scholar] [CrossRef]
- Kotnala, A.; Gordon, R. Double nanohole optical tweezers visualize protein p53 suppressing unzipping of single DNA-hairpins. Biomed. Opt. Express 2014, 5, 1886–1894. [Google Scholar] [CrossRef]
- Tao, T.; Li, J.; Long, Q.; Wu, X. 3D trapping and manipulation of micro-particles using holographic optical tweezers with optimized computer-generated holograms. Chin. Opt. Lett. 2011, 9, 120010. [Google Scholar] [CrossRef]
- Zhu, X.; Li, N.; Yang, J.; Chen, X. Revolution of trapped particle in counter-propagating dual-beams optical tweezers under low pressure. Opt. Express 2021, 29, 11169–11180. [Google Scholar] [CrossRef] [PubMed]
- Thomas, R.G.; Unnithan, A.R.; Moon, M.J.; Surendran, S.P.; Batgerel, T.; Park, C.H.; Kim, C.S.; Jeong, Y.Y. Electromagnetic manipulation enabled calcium alginate Janus microsphere for targeted delivery of mesenchymal stem cells. Int. J. Biol. Macromol. Struct. Funct. Interact. 2018, 110, 465–471. [Google Scholar] [CrossRef]
- Yu, S.; Cheng, J.; Li, Z.; Liu, W.; Cheng, H.; Tian, J.; Chen, S. Electromagnetic wave manipulation based on few-layer metasurfaces and polyatomic metasurfaces. Chem. Phys. Mater. 2022, 1, 6–16. [Google Scholar] [CrossRef]
- Wang, Y.; Luo, L.; Ke, M.; Liu, Z. Acoustic Subwavelength Manipulation of Particles with a Quasiperiodic Plate. Phys. Rev. Appl. 2022, 17, 014026. [Google Scholar] [CrossRef]
- Zhou, Q.; Sariola, V.; Latifi, K.; Liimatainen, V. Controlling the motion of multiple objects on a Chladni plate. Nat. Commun. 2016, 7, 12764. [Google Scholar] [CrossRef]
- Wijaya, H.; Latifi, K.; Zhou, Q. Two-Dimensional Manipulation in Mid-Air Using a Single Transducer Acoustic Levitator. Micromachines 2019, 10, 257. [Google Scholar] [CrossRef]
- Ahmed, D.; Ozcelik, A.; Bojanala, N. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 5120–5125. [Google Scholar] [CrossRef]
- Lee, T.; Kwon, H.B.; Song, W.; Lee, S.; Kim, Y.J. Microfluidic ultrafine particle dosimeter using an electrical detection method with a machine-learning-aided algorithm for real-time monitoring of particle density and size distribution. Lab Chip 2021, 21, 1503–1516. [Google Scholar] [CrossRef] [PubMed]
- Jia, W.N.; Neild, A. Multiple outcome particle manipulation using cascaded surface acoustic waves (CSAW). Microfluid. Nanofluid 2021, 25, 16. [Google Scholar]
- Yiannacou, K.; Sariola, V. Controlled Manipulation and Active Sorting of Particles Inside Microfluidic Chips Using Bulk Acoustic Waves and Machine Learning. Langmuir 2021, 37, 4192–4199. [Google Scholar] [CrossRef]
- Xu, D.; Cai, F.Y.; Chen, M. Acoustic manipulation of particles in a cylindrical cavity: Theoretical and experimental study on the effects of boundary conditions. Ultrasonics 2019, 93, 4192–4199. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.H. An introduction to acoustic micro/nano manipulations. Appl. Phys. 2016, 6, 114–118. [Google Scholar] [CrossRef]
- Devendran, C.; Collins, D.J.; Neild, A. The role of channel height and actuation method on particle manipulation in surface acoustic wave (SAW)-driven microfluidic devices. Microfluid. Nanofluid. 2022, 26, 9. [Google Scholar] [CrossRef]
- Luo, Y.; Feng, R.; Li, X.; Liu, D. A simple approach to determine the mode shapes of Chladni plates based on the optical lever method. Eur. J. Phys. 2019, 40, 065001. [Google Scholar] [CrossRef]
- Tuan, P.H.; Wen, C.P.; Chiang, P.Y.; Yu, Y.T. Exploring the resonant vibration of thin plates: Reconstruction of Chladni patterns and determination of resonant wave numbers. J. Acoust. Soc. Am. 2015, 137, 2113–2123. [Google Scholar] [CrossRef]
- Grabec, I. Vibration driven random walk in a Chladni experiment. Phys. Lett. A 2017, 381, 59–64. [Google Scholar] [CrossRef]
- Greshilov, A.G.; Sukhinin, S.V. Chladni figures of acircular plate floating in bounded and unbounded water bodies with securing support at the center. Sib. Zhurnal Ind. Mat. 2017, 20, 31–40. [Google Scholar]
- Ding, X.Y.; Lin, S.C.S.; Kiraly, B. On-chip manipulation of single microparticles, cells, and organisms using surface acoustic waves. Proc. Natl. Acad. Sci. USA 2012, 109, 11105–11109. [Google Scholar] [CrossRef] [PubMed]
- Fornell, A. Droplet microfluidics. In Acoustic Manipulation of Cells and Microbeads in Droplet Microfluidics; Department of Biomedical Engineering, Lund University: Lund, Sweden; Publishing House: Lund, Sweden, 2018. [Google Scholar]
- Teruyuki, K.; Takuya, Y.; Masahiro, T.; Shin-ichi, H. Two-dimensional acoustic manipulation in air using interference of standing wave field by three sound waves. Jpn. J. Appl. Phys. 2022, 62, SG1063. [Google Scholar]
- Ali, N.; Mohsen, E.H.; Saeed, E.A.; Javad, V.A. Vibration of a thin rectangular plate subjected to series of moving inertial loads. Mech. Res. Commun. 2014, 55, 105–113. [Google Scholar]
- Aman, K.; Anirvan, D. Wave-induced dynamics of a particle on a thin circular plate. Nonlinear Dyn. 2021, 103, 293–308. [Google Scholar]
- Zaslavskii, O.B. Acceleration of particles by rotating black holes: Near-horizon geometry and kinematics. Gravit. Cosmol. 2011, 2, 139–142. [Google Scholar] [CrossRef]
- Fleishman, D.; Asscher, Y.; Urbakh, M. Directed transport induced by asymmetric surface vibrations: Making use of friction. J. Phys. Condens. Matter 2007, 19, 096004. [Google Scholar] [CrossRef]
- Zewei, H.; Zhitao, Z.; Zengyao, L.; Yongmao, P. Particles separation using the inverse Chladni pattern enhanced local Brazil nut effect. Extrem. Mech. Lett. 2021, 49, 101466. [Google Scholar]
- Ikpe, A.E.; Ndon, A.E.; Etuk, E.M. Response variation of chladni patterns on vibrating elastic plate under electro-mechanical oscillation. Niger. J. Technol. 2019, 30, 540–548. [Google Scholar] [CrossRef]
- Ali, N.; Fayaz, R.R. Parametric study of the dynamic response of thin rectangular plates traversed by a moving mass. Acta Mech. 2012, 223, 15–27. [Google Scholar]
- Qinghua, S.; Jiahao, S.; Zhanqiang, L.; Yi, W. Dynamic analysis of rectangular thin plates of arbitrary boundary conditions under moving loads. Int. J. Mech. Sci. 2016, 117, 16–29. [Google Scholar]
- Zheng, Y.; Tao, J.; Sun, Q.; Sun, H.; Chen, Z.; Sun, M.; Xie, G. Soft Actor-Critic based active disturbance rejection path following control for unmanned surface vessel under wind and wave disturbances. Ocean Eng. 2022, 247, 110631. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Sun, M.; Sun, Q.; Piao, M. On Sign Projected Gradient Flow Optimized Extended State Observer Design for a Class of Systems with Uncertain Control Gain. IEEE T Ind. Electron. 2021, 70, 773–782. [Google Scholar] [CrossRef]
- Bie, G.; Chen, X. UAV trajectory tracking based on ADRC control algorithm. In ITM Web of Conferences; EDP Sciences: Les Ulis, France, 2022; Volume 47, p. 02017. [Google Scholar]
- Karimi, A.H.; Alahdadi, S.; Ghayour, M. Dynamic analysis of a rectangular plate subjected to a mass moving with variable velocity on a predefined path or an arbitrary one. Thin-Walled Struct. 2021, 160, 107340. [Google Scholar] [CrossRef]
- Park, I.; Lee, U.; Park, D. Transverse Vibration of the Thin Plates: Frequency-Domain Spectral Element Modeling and Analysis. Math. Probl. Eng. Theory Methods Appl. 2015, 24, 1–15. [Google Scholar] [CrossRef]
- Henk, J.G.; Martin, A.; Devaraj, M.; Ko, W. Inversion of Chladni patterns by tuning the vibrational acceleration. Phys. Rev. E 2010, 82, 012301. [Google Scholar]
- Bettayeb, M.; Mansouri, R.; Al-Saggaf, U.M.; Al-Saggaf, A.U.; Moinuddin, M. New LADRC scheme for fractional-order systems. Alex. Eng. J. 2022, 61, 11313–11323. [Google Scholar] [CrossRef]
- Chang-Mei, H.U.; Ren, J. Study and Application of LADRC for Drum Water-Level Cascade Three-Element Control. Electr. Power 2014, 47, 1–4. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | n | |
|---|---|---|
| 1 | 1 | 126.5475 |
| 1 | 2 | 315.5072 |
| 1 | 3 | 631.0144 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, X.; Tao, J.; Sun, H.; Sun, Q. Kinematic Modes Identification and Its Intelligent Control of Micro-Nano Particle Manipulated by Acoustic Signal. Mathematics 2022, 10, 4156. https://doi.org/10.3390/math10214156
Jiao X, Tao J, Sun H, Sun Q. Kinematic Modes Identification and Its Intelligent Control of Micro-Nano Particle Manipulated by Acoustic Signal. Mathematics. 2022; 10(21):4156. https://doi.org/10.3390/math10214156
Chicago/Turabian StyleJiao, Xiaodong, Jin Tao, Hao Sun, and Qinglin Sun. 2022. "Kinematic Modes Identification and Its Intelligent Control of Micro-Nano Particle Manipulated by Acoustic Signal" Mathematics 10, no. 21: 4156. https://doi.org/10.3390/math10214156
APA StyleJiao, X., Tao, J., Sun, H., & Sun, Q. (2022). Kinematic Modes Identification and Its Intelligent Control of Micro-Nano Particle Manipulated by Acoustic Signal. Mathematics, 10(21), 4156. https://doi.org/10.3390/math10214156