

A Combined Approach of Fuzzy Cognitive Maps and Fuzzy Rule-Based Inference Supporting Freeway Traffic Control Strategies †



Abstract
1. Introduction
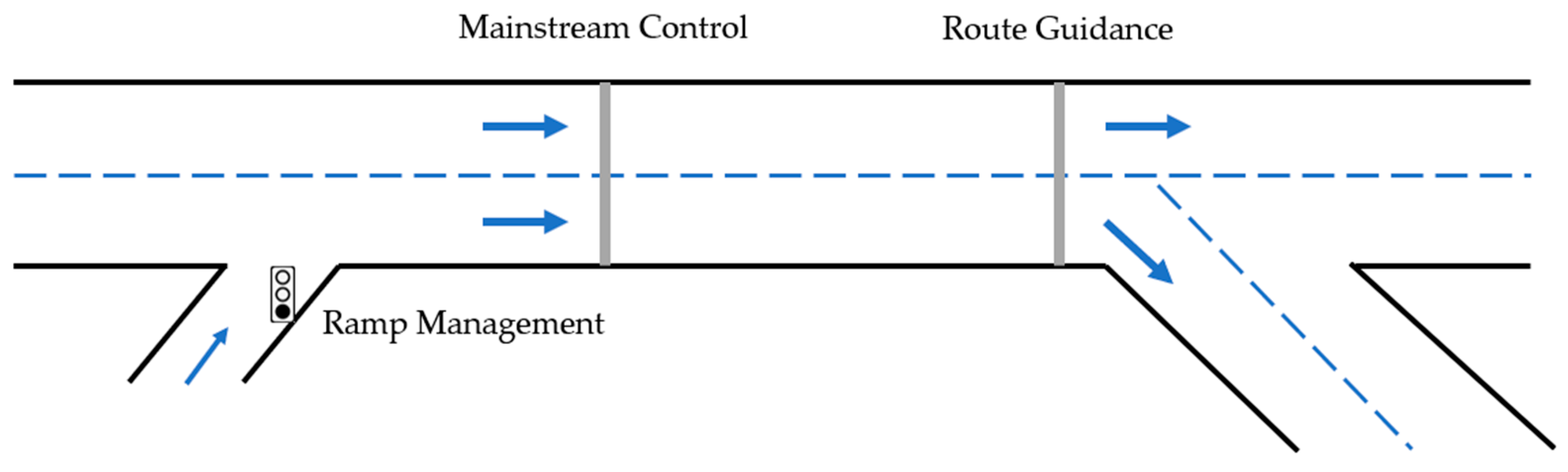
2. Traffic Control Strategies
3. Fuzzy System-Based Controllers in Transportation
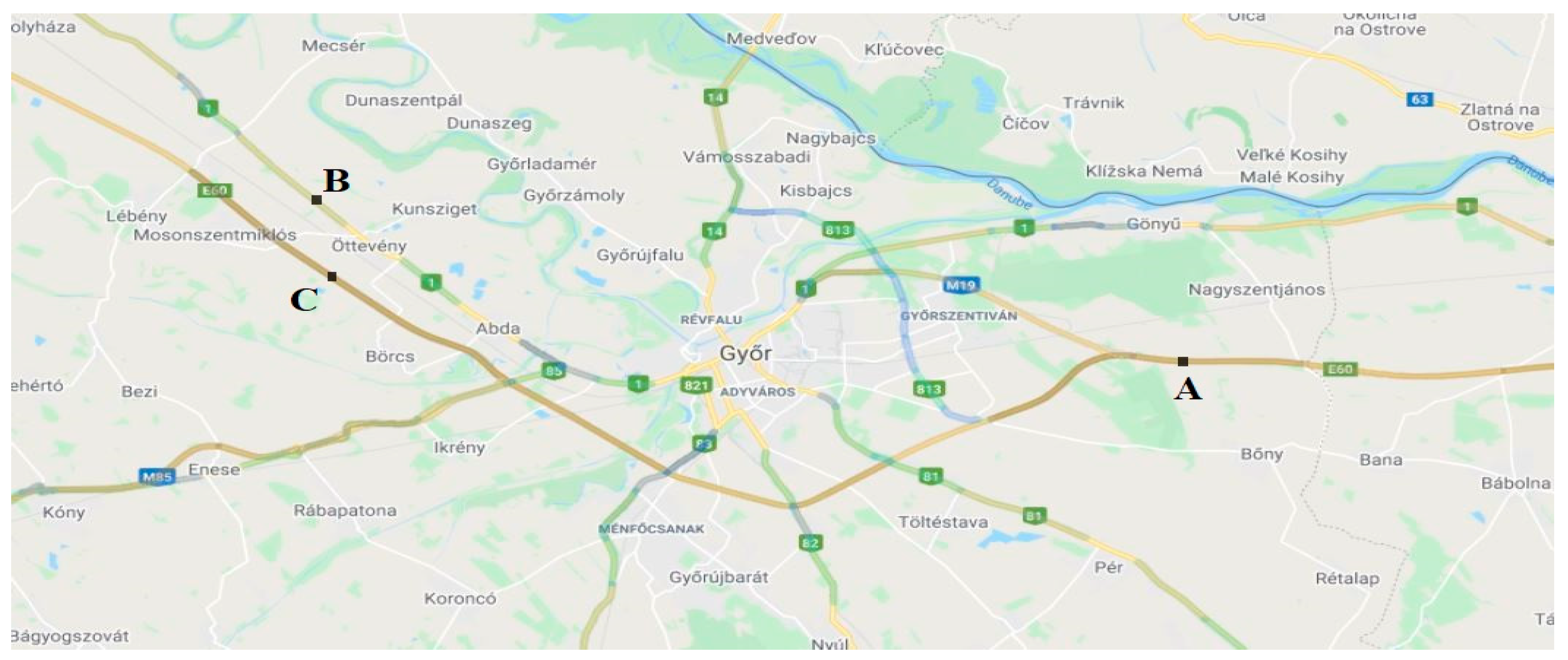
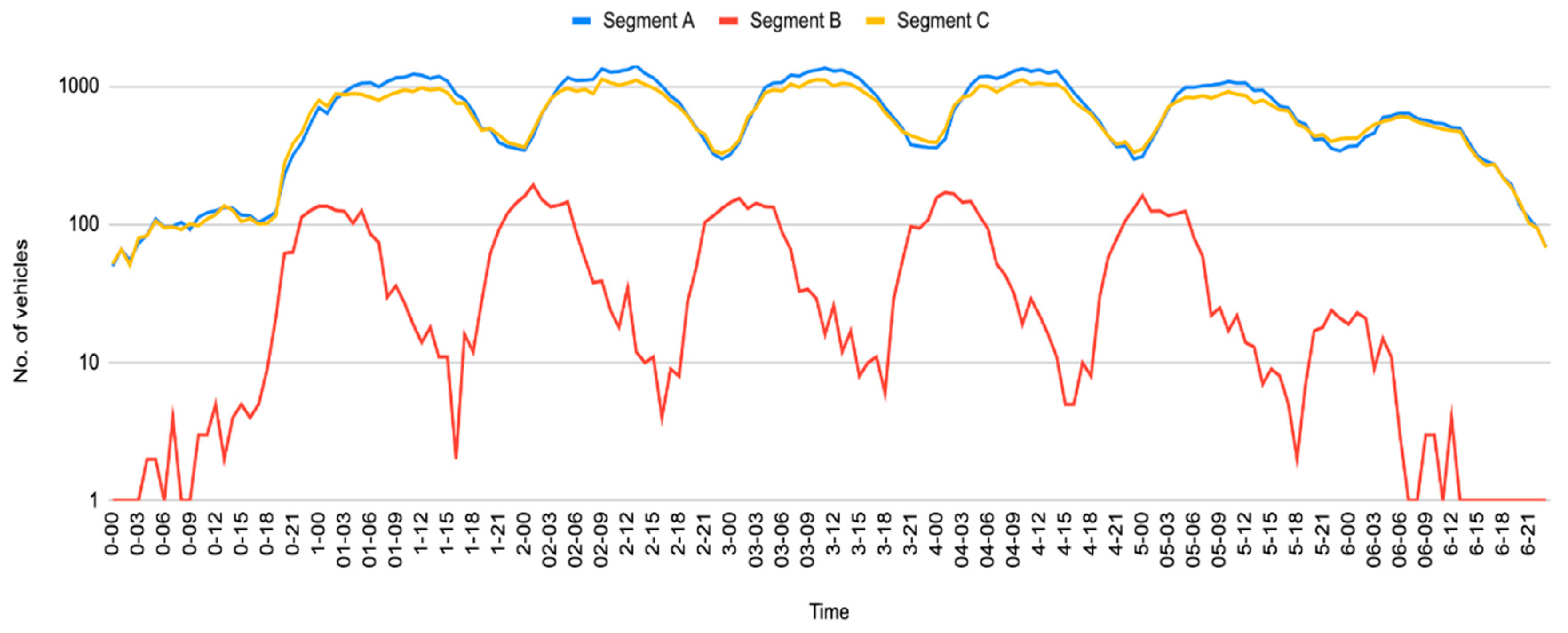
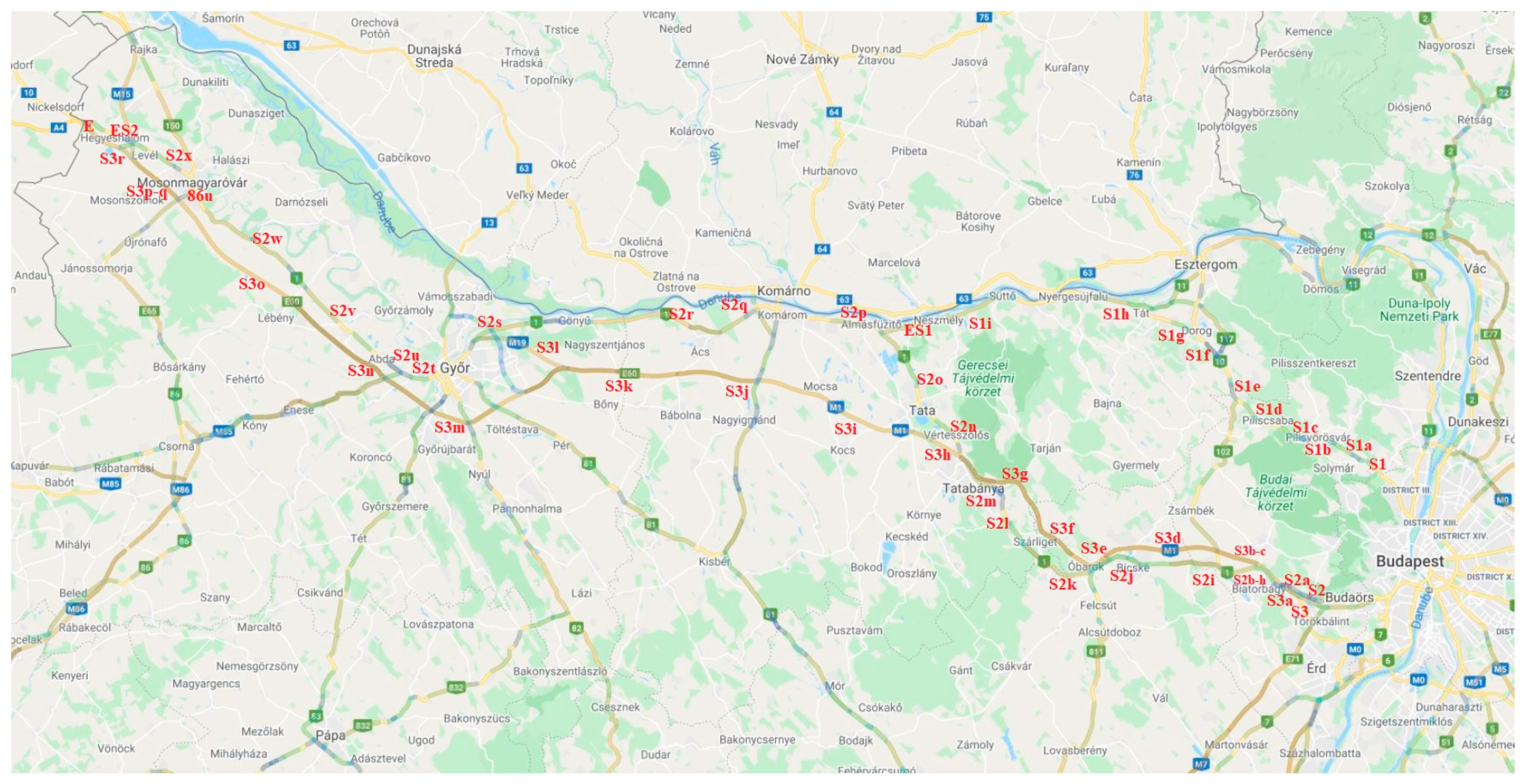
3.1. The Case Study
3.2. The Fuzzy Inference System
- Identifying the acceptable numerical interval for involved linguistic parameters (Table 1 and Table 2). The input parameters are as follows:
- Flow, rate expressed in terms of vehicles per minute,where q is the quantity of vehicles on average (n) passing a certain point in time (T).
- Length of each segment of freeway in kilometers.
- Lane, the number of lanes of the given segment.
- 2.
- Given that they capture and express the characteristics of the fuzzy set employed in the case study, triangular and trapezoidal membership functions are utilized to assess how directly the input and output parameters match. Equations (2) and (3) explain triangular and trapezoidal membership functions, respectively:
- 3.
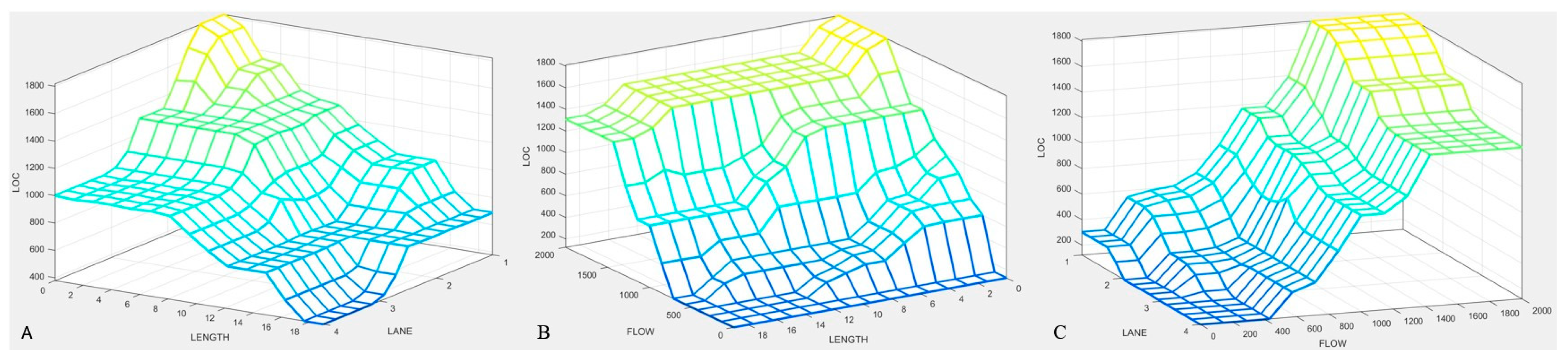
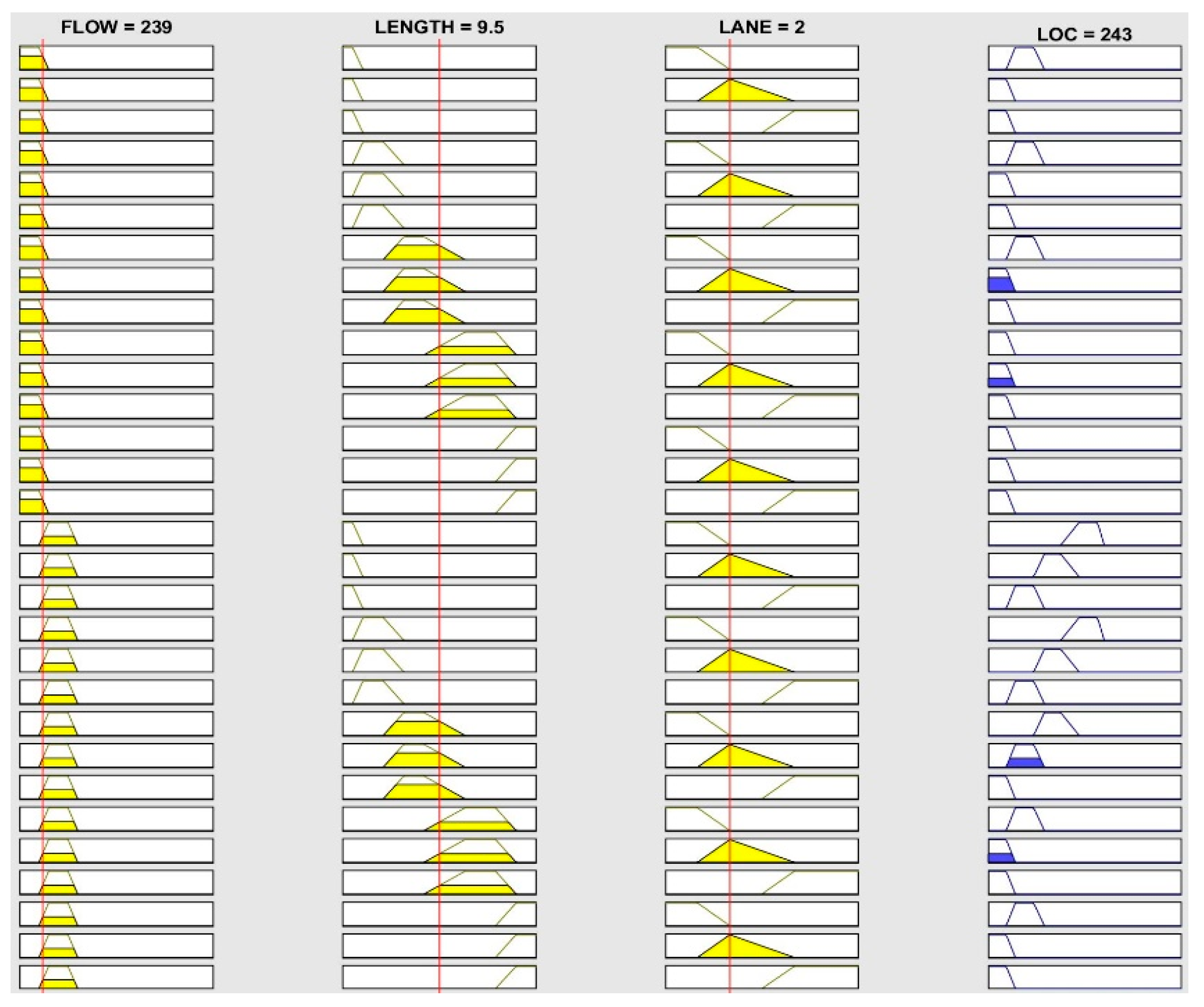
- Input–output links are constrained by if-then fuzzy rules. A total of 75 rules were implemented, mainly founded on the percentile distribution of the data, and expert evaluation. These rules were applied via the MATLAB Fuzzy Rule Editor in order to create the inference and nonlinear surface model.
- 4.
- Centroid of Area (COA) was utilized as the defuzzification operator to determine the corresponding action (i.e., in this study congestion level) to be conducted. The following denotes COA:where z is the fuzzy system output and aggregated output membership function is given as .
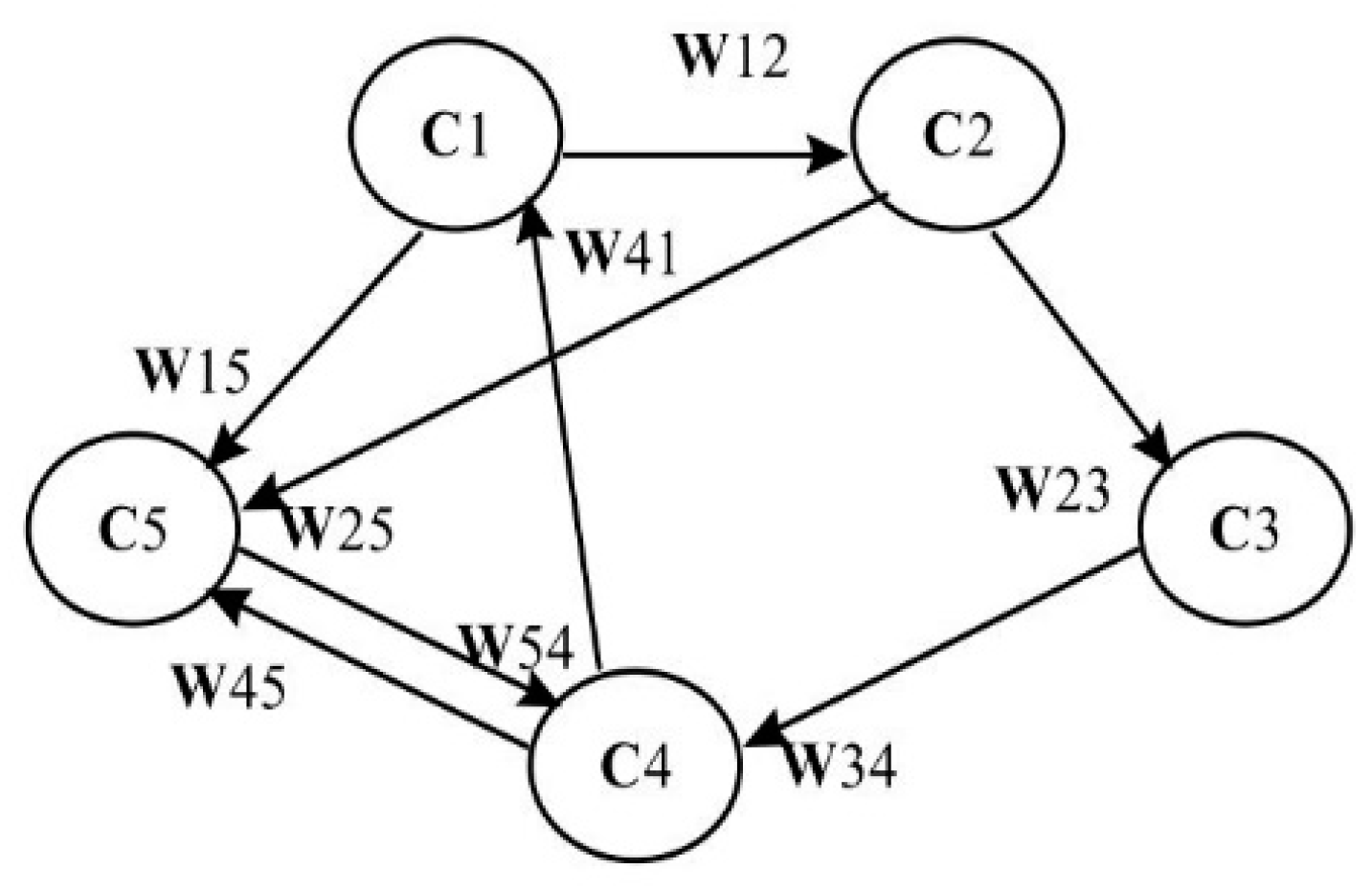
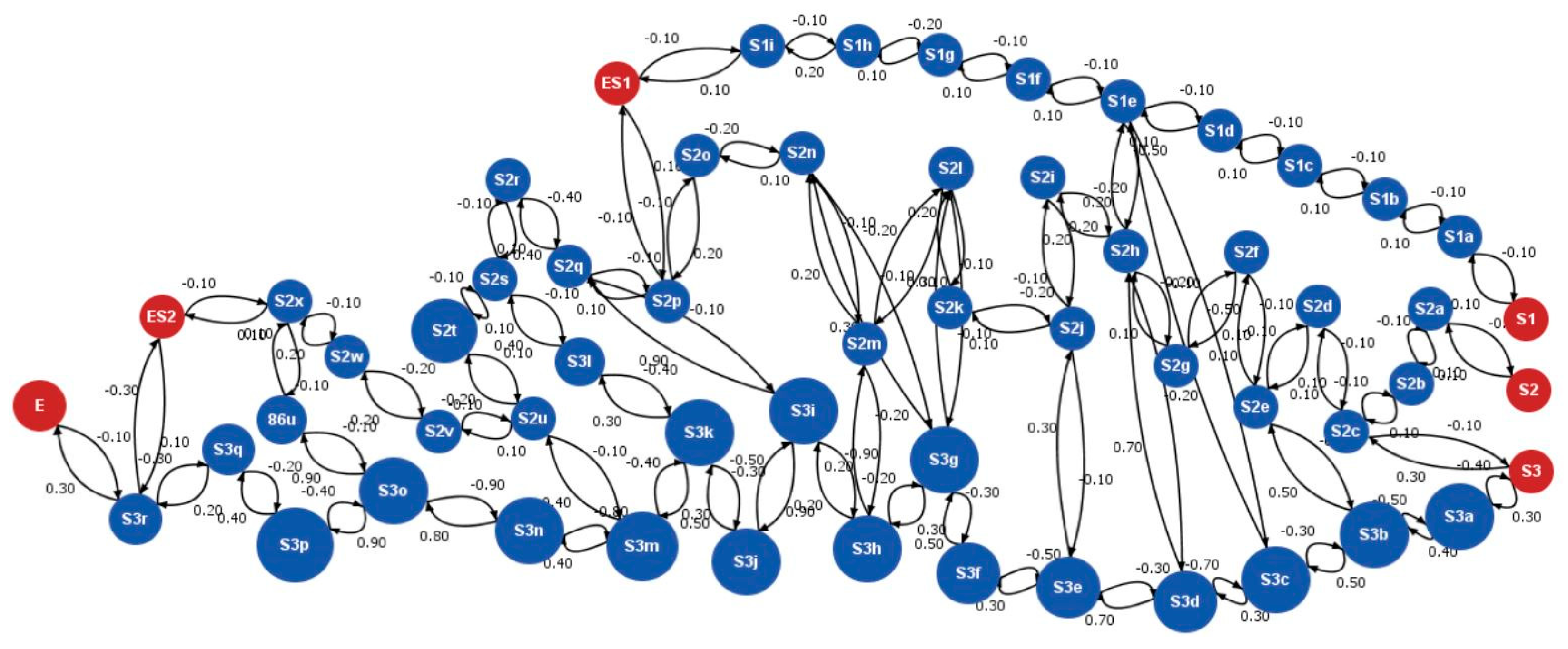
3.3. The Fuzzy Cognitive Map
- Calculating the value of concept Ci at time t, wherein the value of Ci may represent the calculated density in the given segment [38]:
- Calculating the value of concept Ci at time t, wherein the value of Ci may represent the calculated density in the given segment [30]:
4. Results and Discussion
4.1. FIS in Congestion Level Prediction
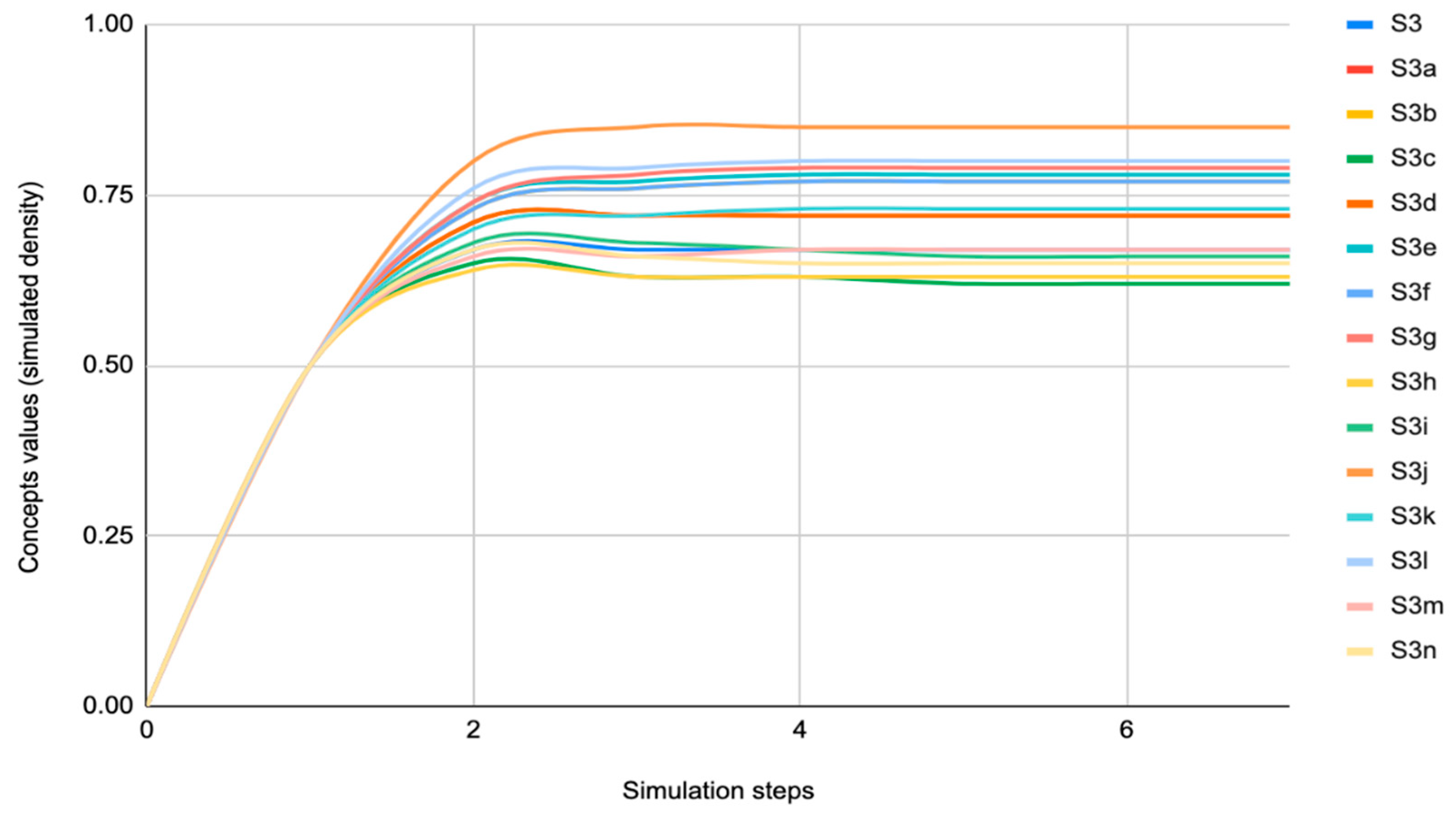
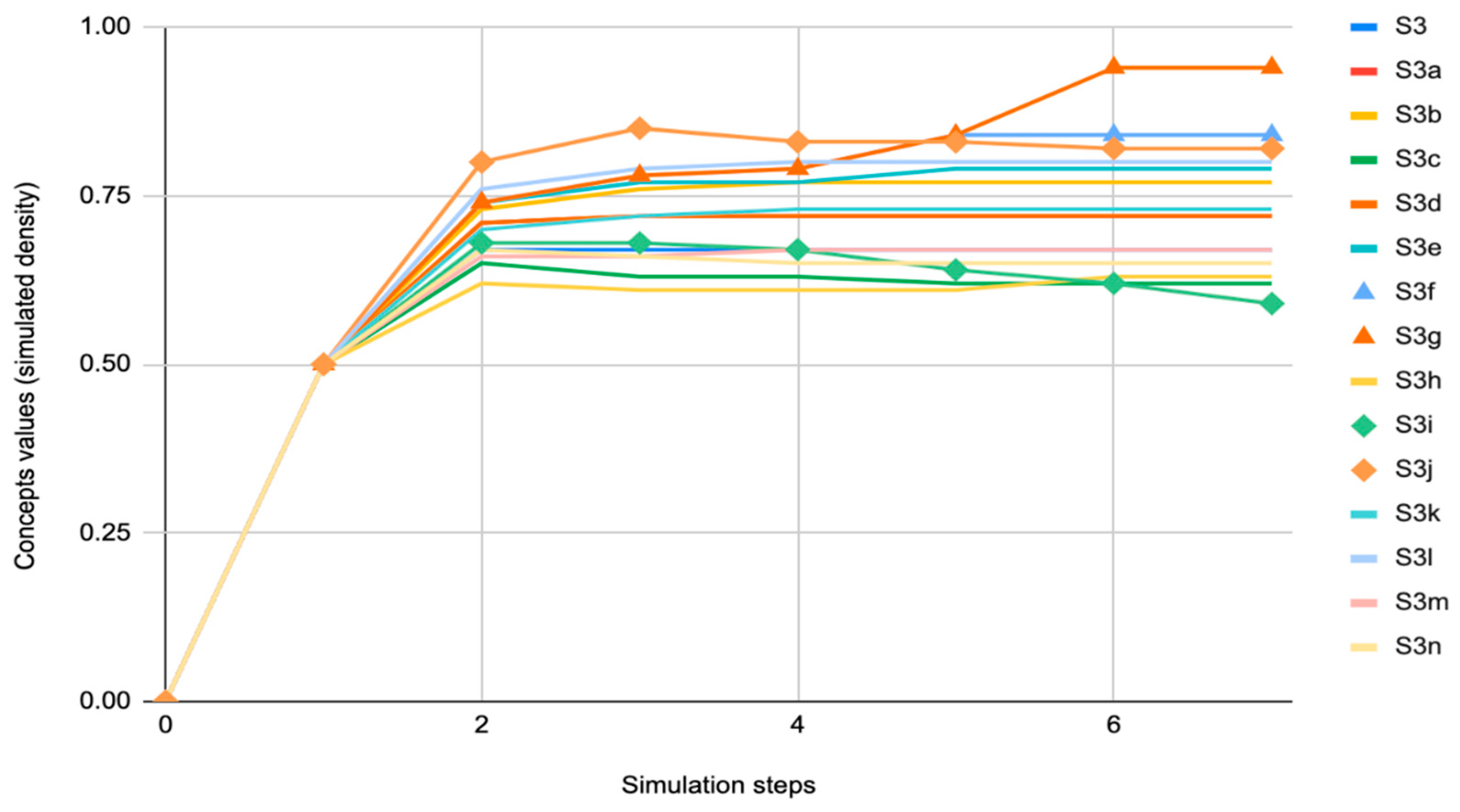
4.2. FCM in Traffic Flow Simulation
5. Conclusions and Future Direction
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhang, K.; Batterman, S. Air pollution and health risks due to vehicle traffic. Sci. Total Environ. 2013, 450, 307–316. [Google Scholar] [CrossRef] [PubMed]
- Ramazani, A.; Vahdat-Nejad, H. A new context-aware approach to traffic congestion estimation. In Proceedings of the 2014 4th International Conference on Computer and Knowledge Engineering (ICCKE), Mashhad, Iran, 29–30 October 2014; pp. 504–508. [Google Scholar]
- Cambridge Systematics. Traffic Congestion and Reliability: Trends and Advanced Strategies for Congestion Mitigation; Cambridge Systematics Inc.: Cambridge, MA, USA, 2005. [Google Scholar]
- Faris, H.; Yazid, S. Development of Communication Technology on VANET with a Combination of Ad-hoc, Cellular and GPS Signals as a Solution Traffic Problems. In Proceedings of the 2019 7th International Conference on Information and Communication Technology (ICoICT), Kuala Lumpur, Malaysia, 24–26 July 2019; pp. 1–9. [Google Scholar]
- Ferrara, A.; Sacone, S.; Siri, S. Freeway Traffic Modelling and Control; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar] [CrossRef]
- Pasquale, C.; Sacone, S.; Siri, S.; Ferrara, A. Traffic control for freeway networks with sustainability-related objectives: Review and future challenges. Annu. Rev. Control 2019, 48, 312–324. [Google Scholar] [CrossRef]
- Mavi, R.K.; Fathi, A.; Saen, R.F.; Mavi, N.K. Eco-innovation in transportation industry: A double frontier common weights analysis with ideal point method for Malmquist productivity index. Resour. Conserv. Recycl. 2019, 147, 39–48. [Google Scholar] [CrossRef]
- Amini, M.; Hatwagner, M.F.; Mikulai, G.C.; Koczy, L.T. A vehicular traffic congestion predictor system using Mamdani fuzzy inference. Syst. Theor. Control Comput. J. 2021, 1, 49–57. [Google Scholar] [CrossRef]
- Yu, X.; Xu, W.; Alam, F.; Potgieter, J.; Fang, C. Genetic fuzzy logic approach to local ramp metering control using microscopic traffic simulation. In Proceedings of the 2012 19th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 28–30 November 2012; pp. 290–297. [Google Scholar]
- Ghods, A.; Kian, A.; Tabibi, M. Adaptive freeway ramp metering and variable speed limit control: A genetic-fuzzy approach. IEEE Intell. Transp. Syst. Mag. 2009, 1, 27–36. [Google Scholar] [CrossRef]
- Liang, X.; Fan, Y. Freeway ramp pid controller regulated by bp neural network. In Proceedings of the 2009 Intelligent Vehicles Symposium, Xi’an, China, 3–5 June 2009; pp. 713–717. [Google Scholar]
- Liang, X.; Li, J.; Luo, N. Single neuron-based freeway traffic density control via ramp metering. In Proceedings of the 2010 2nd International Conference on Information Engineering and Computer Science (ICIECS), Wuhan, China, 25–26 December 2010; pp. 1–4. [Google Scholar]
- Li, J.; Liang, X. Freeway ramp control based on single neuron. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems (ICIS), Shanghai, China, 19–23 July; Volume 2, pp. 122–125.
- Qi, C.; Hou, Z.; Li, X. Freeway feedback ramp metering based on neuron adaptive control algorithm. In Proceedings of the 2008 International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 20–22 October 2008; Volume 1, pp. 349–353. [Google Scholar]
- Feng, C.; Yuanhua, J.; Jian, L.; Huixin, Y.; Zhonghai, N. Design of fuzzy neural network control method for ramp metering. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Shanghai, China, 6–7 January 2011; Volume 1, pp. 966–969. [Google Scholar]
- Amini, M.; Hatwagner, M.F.; Koczy, L.T. Fuzzy System-Based Solutions for Traffic Control in Freeway Networks Toward Sustainable Improvement. In Information Processing and Management of Uncertainty in Knowledge-Based Systems; IPMU 2022. Communications in Computer and Information Science; Springer: Cham, Switzerland, 2022; Volume 1602. [Google Scholar] [CrossRef]
- Mkhitaryan, S.; Giabbanelli, P.J.; Wozniak, M.K.; Napoles, G.; de Vries, N.K.; Crutzen, R. FCMpy: A Python Module for Constructing and Analyzing Fuzzy Cognitive Maps. arXiv 2021, arXiv:2111.12749. [Google Scholar] [CrossRef]
- Siri, S.; Pasquale, C.; Sacone, S.; Ferrara, A. Freeway traffic control: A survey. Automatica 2021, 130, 109655. [Google Scholar] [CrossRef]
- Castillo, H.; Pitfield, D.E. ELASTIC-A methodological framework for identifying and selecting sustainable transport indicators. Transp. Res. Part D 2010, 15, 179–188. [Google Scholar] [CrossRef]
- Lajunen, T.; Parker, D.; Summala, H. Does traffic congestion increase driver aggression? Transp. Res. Part F 1999, 2, 225–236. [Google Scholar] [CrossRef]
- Ferrara, A.; Sacone, S.; Siri, S. An overview of traffic control schemes for freeway systems. Free. Traffic Model. Control. 2018, 193–234. [Google Scholar] [CrossRef]
- Lighthill, M.J.; Whitham, G.B. On kinematic waves II: A theory of traffic flow on long crowded roads. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1955, 229, 317–345. [Google Scholar]
- Hoogendoorn, S.P.; Bovy PH, L. State-of-the-art of vehicular traffic flow modelling. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2001, 215, 283–303. [Google Scholar] [CrossRef]
- Ferrara, A.; Sacone, S.; Siri, S. First-Order Macroscopic Traffic Models. In Freeway Traffic Modelling and Control; Advances in Industrial Control Series; Springer: Cham, Switzerland, 2018; Volume 3, pp. 47–84. [Google Scholar]
- Ngo, C.Y.; Victor, O.K.L. Freeway traffic control using fuzzy logic controllers. Inform. Sci. 1994, 1, 59–76. [Google Scholar] [CrossRef]
- Zhao, D.; Dai, Y.; Zhang, Z. Computational intelligence in urban traffic signal control: A survey. IEEE Trans. Syst. Man Cybern. 2012, 42, 485–494. [Google Scholar] [CrossRef]
- John, A.; Yang, Z.; Riahi, R. Application of a collaborative modeling and strategic fuzzy decision support system for selecting appropriate resilience strategies for seaport operations. J. Traff. Transp. Eng. Engl. Ed. 2014, 1, 159–179. [Google Scholar]
- Li, Q.; Qiao, F.; Yu, L. Socio-demographic impacts on lane-changing response time and distance in work zone with drivers’ smart advisory system. J. Traff. Transp. Eng. Engl. Ed. 2015, 2, 313–326. [Google Scholar] [CrossRef]
- Amini, M.; Hatwagner, M.F.; Mikulai, G.C.; Koczy, L.T. An intelligent traffic congestion detection approach based on fuzzy inference system. In Proceedings of the 2021 IEEE 15th International Symposium on Applied Computational Intelligence and Informatics (SACI), Timisoara, Romania, 19–21 May 2021; pp. 97–104. [Google Scholar] [CrossRef]
- Amini, M.; Hatwagner, M.F.; Mikulai, G.C.; Koczy, L.T. Developing a macroscopic model based on fuzzy cognitive map for road traffic flow simulation. Infocommun. J. 2021, 13, 14–23. [Google Scholar] [CrossRef]
- László, F.T.; Péter, T. Hungary’s ITS National Report. ITS National Report. 2018. Available online: https://ec.europa.eu/transport/sites/transport/files/2018_hu_its_progress_report_2017.pdf (accessed on 8 October 2022).
- European Commission. EU Transport in Figures—Statistical Pocketbook 2020, Number of Registered Passenger Cars in Hungary from 1990 to 2018; European Commission: Brussels, Belgium, 2020. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Mamdani, E.H.; Assilian, S. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man. Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Axelrod, R. Structure of Decision: The Cognitive Maps of Political Elites; Princeton University Press: Princeton, NJ, USA, 1976; Available online: https://www.jstor.org/stable/j.ctt13x0vw3 (accessed on 8 October 2022).
- Kosko, B. Fuzzy cognitive maps. Int. J. Man. Mach. Stud. 1986, 24, 65–75. [Google Scholar] [CrossRef]
- Messmer, A.; Papageorgiou, M. METANET: A macroscopic simulation program for motorway networks. Traffic Eng. Control 1990, 31, 466–470. Available online: https://www.researchgate.net/publication/282285780_METANET_a_macroscopic_simulation_program_for_motorway_networks (accessed on 8 October 2022).
- Stylios, C.D.; Groumpos, P.P. Modeling Complex Systems Using Fuzzy Cognitive Maps. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2004, 34, 155–162. [Google Scholar] [CrossRef]
- Iordanidou, G.-R.; Roncoli, C.; Papamichail, I.; Papageorgiou, M. Feedback-based mainstream traffic flow control for multiple bottlenecks on motorways. IEEE Trans. Intell. Transp. Syst. 2015, 16, 610–621. [Google Scholar]
- Afrin, T.; Yodo, N. A survey of road traffic congestion measures towards a sustainable and resilient transportation system. Sustainability 2020, 12, 4660. [Google Scholar] [CrossRef]
- Aftabuzzaman, M. Measuring traffic congestion—A critical review. In Proceedings of the 30th Australasian Transport Research Forum (ATRF), Melbourne, VIC, Australia, 25–27 September 2007. [Google Scholar]
- Turner, S.M.; Lomax, T.J.; Levinson, H.S. Measuring and Estimating Congestion Using Travel Time–Based Procedures. Transp. Res. Rec. 1996, 1564, 11–19. [Google Scholar] [CrossRef]
- Jabbarpour, M.R.; Zarrabi, H.; Khokhar, R.H.; Shamshirband, S.; Choo, K.K.R. Applications of computational intelligence in vehicle traffic congestion problem: A survey. Soft Comput. 2018, 22, 2299–2320. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables | Numerical Ranges | Linguistic Term | Effect on Traffic Congestion |
|---|---|---|---|
| Flow | 1< F ≤ 300 vehicles | Very low | Very small impact |
| 200 ≤ F ≤600 vehicles | Low | Small impact | |
| 500 ≤ F ≤ 1000 vehicles | Average | Steady state | |
| 800 ≤ F ≤ 1400 vehicles | High | High increasing impact | |
| 1200 ≤ F ≤ 2000 vehicles | Very High | Very high increasing impact | |
| Length | 0.1 < Le ≤ 2 KM | Very Short | Very high impact |
| 1 ≤ Le≤ 6 KM | Short | High impact | |
| 4≤ Le ≤ 12 KM | Average | Steady state | |
| 8 ≤ Le ≤ 17 KM | Long | Reducing impact | |
| 15 ≤ Le < 19 KM | Very Long | High reducing impact | |
| Lane | 1 < La ≤ 2 | Narrow | High increasing impact |
| 2 ≤ La ≤ 3 | Average | Reducing impact | |
| 3 ≤ La < 4 | Wide | High reducing impact |
| Output Variable | Numerical Ranges | Linguistic Term | Equivalence |
|---|---|---|---|
| LOC | 1< LOC ≤ 280 vehicles | Completely congestion free |
|
| 186 ≤ LOC ≤ 580 vehicles | Congestion free |
| |
| 470 ≤ LOC ≤ 940 vehicles | Low |
| |
| 750 ≤ LOC ≤ 1200 vehicles | Stable |
| |
| 1130≤ LOC ≤ 1500 vehicles | Near Congestion |
| |
| 1400 ≤ LOC ≤ 1650 vehicles | Congestion |
| |
| 1600 ≤ LOC < 2000 vehicles | Severe Congestion |
|
| Step | S3 | S3a | S3b | S3c | S3d | S3e | S3f | S3g | S3h | S3i | S3j | S3k | S3l | S3m | S3n |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 | 0.50 |
| 2 | 0.67 | 0.71 | 0.73 | 0.65 | 0.71 | 0.74 | 0.73 | 0.74 | 0.64 | 0.68 | 0.80 | 0.70 | 0.76 | 0.66 | 0.67 |
| 3 | 0.67 | 0.72 | 0.76 | 0.63 | 0.72 | 0.77 | 0.76 | 0.78 | 0.63 | 0.68 | 0.85 | 0.72 | 0.79 | 0.66 | 0.66 |
| 4 | 0.67 | 0.72 | 0.77 | 0.63 | 0.72 | 0.78 | 0.77 | 0.79 | 0.63 | 0.67 | 0.85 | 0.73 | 0.80 | 0.67 | 0.65 |
| 5 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.78 | 0.77 | 0.79 | 0.63 | 0.66 | 0.85 | 0.73 | 0.80 | 0.67 | 0.65 |
| 6 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.78 | 0.77 | 0.79 | 0.63 | 0.66 | 0.85 | 0.73 | 0.80 | 0.67 | 0.65 |
| 7 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.78 | 0.77 | 0.79 | 0.63 | 0.66 | 0.85 | 0.73 | 0.80 | 0.67 | 0.65 |
| Step | S3 | S3a | S3b | S3c | S3d | S3e | S3f | S3g | S3h | S3i | S3j | S3k | S3l | S3m | S3n |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 |
| 2 | 0.67 | 0.71 | 0.73 | 0.65 | 0.71 | 0.74 | 0.74 | 0.74 | 0.62 | 0.68 | 0.80 | 0.70 | 0.76 | 0.66 | 0.67 |
| 3 | 0.67 | 0.72 | 0.76 | 0.63 | 0.72 | 0.77 | 0.78 | 0.78 | 0.61 | 0.68 | 0.85 | 0.72 | 0.79 | 0.66 | 0.66 |
| 4 | 0.67 | 0.72 | 0.77 | 0.63 | 0.72 | 0.77 | 0.79 | 0.79 | 0.61 | 0.67 | 0.83 | 0.73 | 0.80 | 0.67 | 0.65 |
| 5 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.79 | 0.84 | 0.84 | 0.61 | 0.64 | 0.83 | 0.73 | 0.80 | 0.67 | 0.65 |
| 6 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.79 | 0.84 | 0.94 | 0.63 | 0.62 | 0.82 | 0.73 | 0.80 | 0.67 | 0.65 |
| 7 | 0.67 | 0.72 | 0.77 | 0.62 | 0.72 | 0.79 | 0.84 | 0.94 | 0.63 | 0.59 | 0.82 | 0.73 | 0.80 | 0.67 | 0.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amini, M.; Hatwagner, M.F.; Koczy, L.T. A Combined Approach of Fuzzy Cognitive Maps and Fuzzy Rule-Based Inference Supporting Freeway Traffic Control Strategies. Mathematics 2022, 10, 4139. https://doi.org/10.3390/math10214139
Amini M, Hatwagner MF, Koczy LT. A Combined Approach of Fuzzy Cognitive Maps and Fuzzy Rule-Based Inference Supporting Freeway Traffic Control Strategies. Mathematics. 2022; 10(21):4139. https://doi.org/10.3390/math10214139
Chicago/Turabian StyleAmini, Mehran, Miklos F. Hatwagner, and Laszlo T. Koczy. 2022. "A Combined Approach of Fuzzy Cognitive Maps and Fuzzy Rule-Based Inference Supporting Freeway Traffic Control Strategies" Mathematics 10, no. 21: 4139. https://doi.org/10.3390/math10214139
APA StyleAmini, M., Hatwagner, M. F., & Koczy, L. T. (2022). A Combined Approach of Fuzzy Cognitive Maps and Fuzzy Rule-Based Inference Supporting Freeway Traffic Control Strategies. Mathematics, 10(21), 4139. https://doi.org/10.3390/math10214139