1. Introduction
The paper deals with the numerical study of integral dynamic models based on Volterra integral equations of the first kind with kernels having discontinuities on a set of smooth curves. Namely, let us consider the following linear integral model
where the kernel
is defined as follows
where
,
functions
have continuous derivatives with respect to
t for
,
⋯
, for
, functions
increase in a small neighborhood
⋯
and
denotes closure of set
.
Such weakly regular Volterra equations of the first kind with piecewise continuous kernels were first classified and employed by Sidorov [
1] and Lorenzi [
2] and extensively studied by many authors during the last decade. Here, readers may refer to the monograph by Sidorov [
3] and references therein. Volterra operator equations of the first kind were studied by Sidorov and Sidorov [
4], who obtained the sufficient conditions for the existence of a unique solution. Muftahov, Tynda and Sidorov [
5] employed direct quadrature methods for the solution of such equations in both linear and nonlinear cases. Such Volterra models have many applications in modeling evolving dynamical processes including energy storage systems [
6,
7] and models for the electric power systems development [
8]. The nonlinear integral equations with unknown lower limits of integration are in the core of different models in economics, operations research, population biology, and environmental sciences. The systems of such equations and the existence and uniqueness theorems studied by Hritonenko and Yatsenko [
9,
10]. For a comprehensive introduction to numerical methods for the solution to the Volterra equations of the first kind (including cases of variable integration limits), we refer the reader to books by Brunner [
11] and Apartsyn [
12].
Inverse Problem
The classical problem statement for model (
1) and (
2) is to determine function
under the assumption of a known kernel
and source function
. However, a number of applications of model (
1) and (
2) in practice leads to the inverse problem of determining the curves
. With this formulation, the Equation (
1) is interpreted as a nonlinear integral equation with unknown integration limits, its numerical study is a novel, mathematically challenging problem. The theory of such equations has not yet been developed and attacked for the first time in the present paper.
Indeed, if one considers just single term (
,
) of Equation (
1) as an integral operator
it can be outlined that such an operator is obviously nonlinear since it is not homogeneous nor additive.
The complexity of the discretization is primarily related to the approximation of integrals with unknown lengths of integration segments.
The models described by integral equations with unknown integration limits were first formulated in the seminal works of Glushkov. Here, readers may refer to his book [
13]. The applications of such integral models in economics were investigated in the works of Hritonenko and Yatsenko, as can be seen, for example, in ref. [
14] and book [
15]. The number of direct and iterative numerical methods are proposed by Tynda, and here readers may refer to [
16,
17,
18].
The objective of this paper is to provide the new problem statement (inverse problem) as well as to propose the efficient numerical method for the solution. In this paper, the direct method of discretization with a posteriori verification of calculations is proposed for the inverse problem (
1) and (
2) in the case of
.
The paper is organized as follows.
Section 3 analyzes the arithmetic complexity of calculations. A generalization of the method is also proposed in
Section 4 for an arbitrary number of discontinuity curves. In
Section 5, the numerical results of solving model problems are given.
2. Numerical Method
Let us first consider in detail the problem (
1)–(
2) for
, which consists in determining the unknown function
:
In order to construct an approximate solution, we introduce a grid of nodes (not necessarily uniform) on the segment
:
Let the approximate solution
be a piecewise linear function constructed on the points
Let us start defining the unknown values
. In order to carry out the discretization of the Equation (
3), we also introduce an auxiliary integer-valued function
In other words,
denotes the number of the grid segment that the unknown value
falls on. Since
is a monotonically increasing function and
, we have
We require that, at the nodes of the grid
, the Equation (
3) turn:
Using the definition of
and denoting
, we can represent the Equation (
4) in the following form
Assuming that the values
are somehow obtained, we approximate the integrals in (
5) as follows
Here, to approximate the integrals in the first and fourth terms of (
5), the quadrature rule of the middle rectangles is applied. For the second and third terms, the formulas of the left and right rectangles are applied, respectively.
Thus, with the knowledge of the numbers
approximate values
of the unknown function at grid points can be found by the explicit Formula (
7).
The idea of determining the numbers
consists of sequentially iterating over the possible values
for each node number
:
For each possible
, the corresponding values
are calculated using the Formula (
7). The iteration for each value
k stops if the condition
is met, confirming the assumption that
belongs to the specified interval.
It is easy to see that the estimate of the accuracy of the approximate solution for the problem (
3) according to the proposed computational scheme as follows
meaning that the proposed method has the first order of convergence. As a note, let us highlight here that for the introduction to the theory of uniform approximation of the functions by polynomials, readers may refer to the book by Dziadyk [
19], and for the theory of functional equations and applications of functional analysis to applied analysis and computational mathematics, readers may refer to the classic book by Kantorovich and Akilov [
20].
3. Arithmetic Complexity
Let us turn to the question of the computational cost of the proposed method from the point of view of the arithmetic complexity of calculations. We will count the number of required arithmetic operations, calculations of the values of the functions included in the equation, as well as operations for comparing the two numbers.
Calculation of the values of functions
and
at grid nodes and at midpoints:
Calculation of the values
:
Estimation of the number of arithmetic operations
to iterate over possible values
:
Estimation of the number of comparison operations
when iterating over possible values
:
Thus, we obtain a general estimate
of the arithmetic complexity of the method:
4. General Case
The presented approach is naturally generalized to the case of a system of integral equations with an arbitrary number of discontinuity curves .
Let us consider the problem of determining the entire family of discontinuity curves
of the following nonlinear integral model
Here, and the functions satisfy the following conditions: , ⋯, for , functions increase in a small neighborhood ⋯
In order to construct an approximate solution, let us introduce a grid of nodes on the segment
:
Let approximate solutions
be piecewise linear functions constructed on the points
To discretize the system of Equation (
10), we also introduce an auxiliary integer-valued vector function
where
denotes the number of the grid segment on which the unknown value
falls. Since
are monotonically increasing functions and
, we have
Then, starting with sufficiently large values
N, the system (
10) in the nodes
of the grid can be represented as follows
Approximating the integrals in (
11), as before in (
6), we obtain a system of linear algebraic equations with respect to the coefficients
.
Next, these systems of equations are successively solved for each of the permissible sets of values of and selection is performed according to a principle similar to the scalar case.
5. Numerical Experiments
Let us illustrate the effectiveness of the proposed algorithm by the example of solving two model problems.
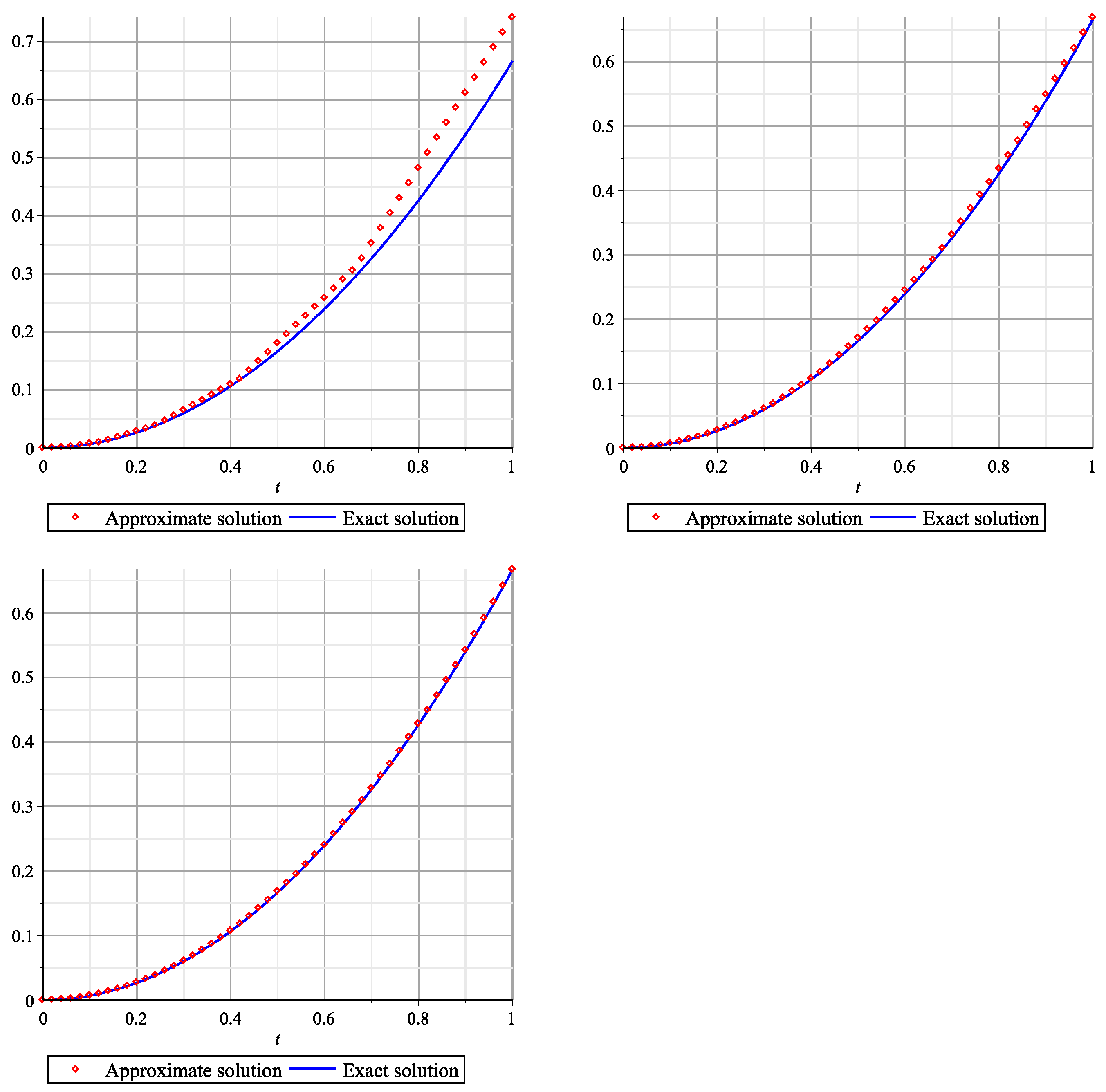
5.1. Problem 1
Let us consider the following equation
The exact solution of this problem is the function , .
The results of solving Equation (
12) are given in
Table 1, in which the following designations are adopted:
N is the number of grid nodes,
is the error norm, and
is the order of accuracy.
A graphical illustration of convergence is shown in
Figure 1.
5.2. Problem 2
Let us consider the following equation
where
, and the right part
is selected in such a way that the exact solution is the function
.
The results of solving the problem (
13) are shown in
Table 2, and the graphic illustration is in
Figure 2.
The results shown in the
Table 1 and
Table 2 show the stable convergence of the proposed numerical method. We obtain an acceptable error even with sufficiently small values of
N. The calculation time is proportional to the value of
and corresponds to the estimate of arithmetic complexity (
9). Since the problem is new, there are no alternative analytical or numerical methods for solving it in the literature to date.
It should also be noted that the practical order
of accuracy is higher than the stated theoretical order (
8). This is explained by the fact that the first order of accuracy in the estimation arises due to the need to use quadrature formulas of left and right rectangles. However, they are only used for two integrals with small integration segments and in practice do not significantly affect the error.
6. Conclusions
The paper considers a fundamentally new problem for an integral model with discontinuous kernels, which has not previously been studied in the literature. A new numerical approach to its solution in a fairly general case is proposed. The proposed numerical results confirm the effectiveness of the method. The discussion of a number of theoretical aspects of the suggested inverse problem (such as the smoothness of solutions and the well-posedness conditions) is the subject of future research.
Further development of the special Volterra models will enable the dynamic optimization of the power systems modes on a given time horizon by the automatic selection of the composition of the equipment with different efficiency defined in terms of desired functions .
Author Contributions
Conceptualization, A.N.T. and D.N.S.; Data curation, A.N.T.; Formal analysis, A.N.T. and D.N.S.; Funding acquisition, D.N.S.; Methodology, A.N.T.; Project administration, D.N.S.; Software, A.N.T.; Supervision, D.N.S.; Validation, A.N.T. and D.N.S.; Visualization, A.N.T.; Writing—original draft, A.N.T. and D.N.S.; Writing—review and editing, A.N.T. and D.N.S. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Russian Science Foundation (project no. 22-29-01619).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Sidorov, D.N. On parametric families of solutions of Volterra integral equations of the first kind with piecewise smooth kernel. Differ. Equ. 2013, 49, 210–216. [Google Scholar] [CrossRef]
- Lorenzi, A. Operator equations of the first kind and integro-differential equations of degenerate type in Banach spaces and applications of integro-differential PDE’s. Eurasian J. Math. Comput. Appl. 2013, 1, 50–75. [Google Scholar] [CrossRef]
- Sidorov, D. Integral Dynamical Models: Singularities, Signals and Control; Chua, L.O., Ed.; World Scientific Series on Nonlinear Sciences Series A; World Scientific Press: Singapore, 2015; Volume 87. [Google Scholar]
- Sidorov, N.A.; Sidorov, D.N. On the solvability of a class of Volterra operator equations of the first kind with piecewise continuous kernels. Math. Notes 2014, 96, 811–826. [Google Scholar] [CrossRef]
- Muftahov, I.; Tynda, A.; Sidorov, D. Numeric solution of Volterra integral equations of the first kind with discontinuous kernels. J. Comput. Appl. Math. 2017, 313, 119–128. [Google Scholar] [CrossRef]
- Sidorov, D.; Panasetsky, D.; Tomin, N.; Karamov, D.; Zhukov, A.; Muftahov, I.; Dreglea, A.; Liu, F.; Li, Y. Toward zero-emission hybrid AC/DC power systems with renewable energy sources and storages: A case study from lake Baikal region. Energies 2020, 13, 1226. [Google Scholar] [CrossRef]
- Sidorov, D.; Tynda, A.; Muftahov, I.; Dreglea, A.; Liu, F. Nonlinear systems of Volterra equations with piecewise smooth kernels: Numerical solution and application for power systems operation. Mathematics 2020, 8, 1257. [Google Scholar] [CrossRef]
- Apartsyn, A.S.; Markova, E.V.; Sidler, I.V. Integral model of developing system without prehistory. Tambov Univ. Rep. Ser. Nat. Tech. Sci. 2018, 23, 361–367. [Google Scholar] [CrossRef]
- Hritonenko, N.; Yatsenko, Y. Solvability of integral equations with endogenous delays. Acta Appl. Math. 2013, 128, 49–66. [Google Scholar] [CrossRef]
- Hritonenko, H.; Yatsenko, Y. Nonlinear integral models with delays: Recent developments and applications. J. King Saud Univ. Sci. 2020, 32, 726–731. [Google Scholar] [CrossRef]
- Brunner, H. Volterra Integral Equations: An Introduction to Theory and Applications; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Apartsyn, A.S. Nonclassical Linear Volterra Equations of the First Kind; De Gruyter: Berlin, Germany, 2003. [Google Scholar]
- Glushkov, V.M.; Ivanov, V.V.; Yanenko, V.M. Modelirovanie Razvivayushchikhsya Sistem; Nauka: Moscow, Russia, 1983; 352p. (In Russian) [Google Scholar]
- Yatsenko, Y. Volterra integral equations with unknown delay time. Methods Appl. Anal. 1995, 2, 408–419. [Google Scholar] [CrossRef]
- Hritonenko, N.; Yatsenko, Y. Mathematical Modeling in Economics, Ecology, and the Environment; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1999. [Google Scholar]
- Tynda, A.N. Iterative numerical method for integral models of a nonlinear dynamical system with unknown delay. PAMM 2009, 9, 591–592. [Google Scholar] [CrossRef]
- Tynda, A.N. On the direct numerical methods for systems of integral equations with nonlinear delays. PAMM 2008, 8, 10857–10858. [Google Scholar] [CrossRef]
- Tynda, A.N. Numerical algorithms of optimal complexity for weakly singular Volterra integral equations. Comput. Methods Appl. Math. 2006, 6, 436–442. [Google Scholar] [CrossRef]
- Dziadyk, V.K. Introduction in Theory of Uniform Approximation of the Functions by Polynomials; Nauka: Moscow, Russia, 1977; 512p. (In Russian) [Google Scholar]
- Kantorovich, L.V.; Akilov, G.P. Functional Analysis, 2nd ed.; Pergamon: Oxford, UK, 1982; 589p. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}