

Communication Times Reconstruction in a Telecontrolled Client–Server Scheme: An Approach by Kalman Filter Applied to a Proprietary Real-Time Operating System and TCP/IP Protocol

 ,
,  ,
,  , , , , and
, , , , and
Abstract
:1. Introduction
2. Times in Telecontrol Process
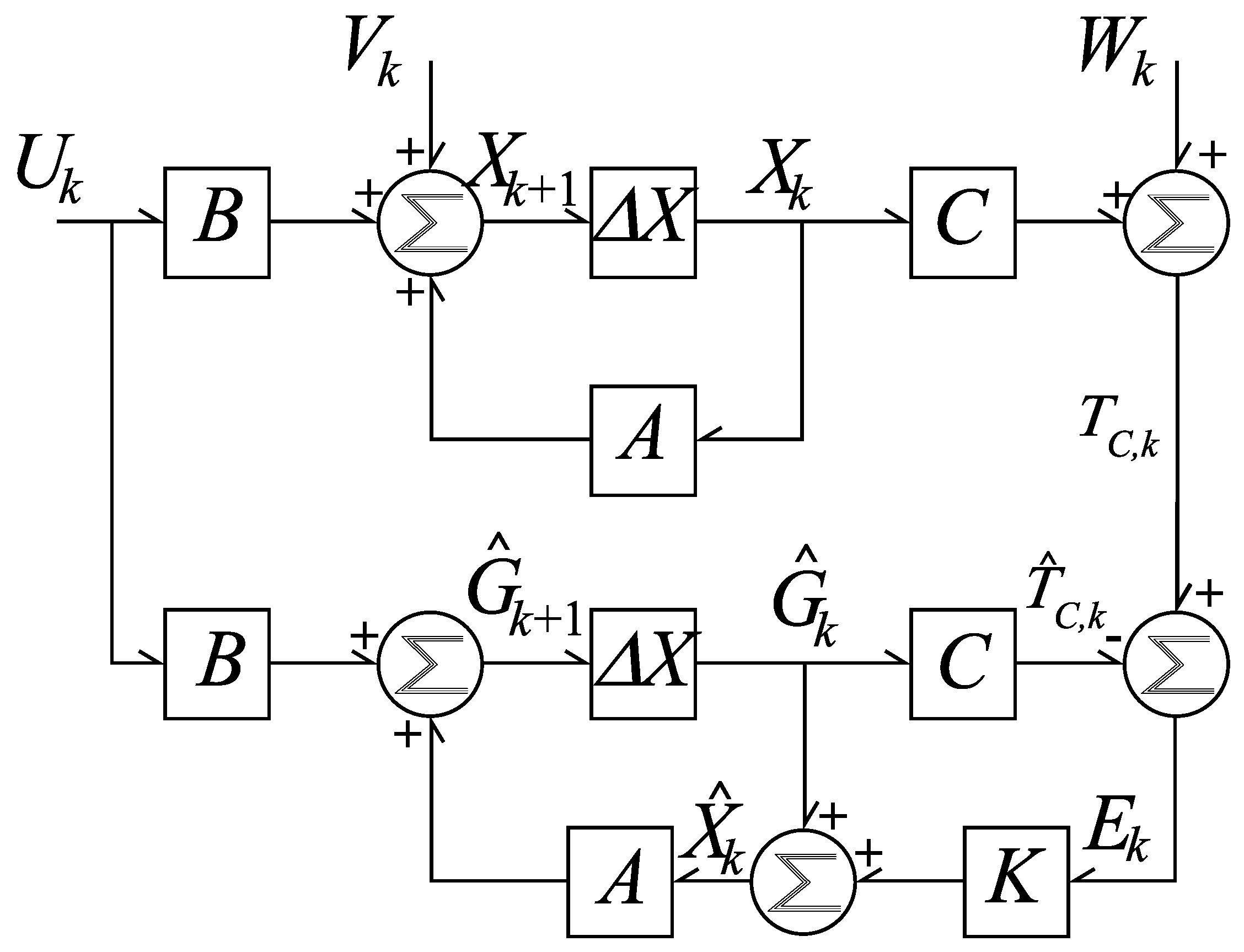
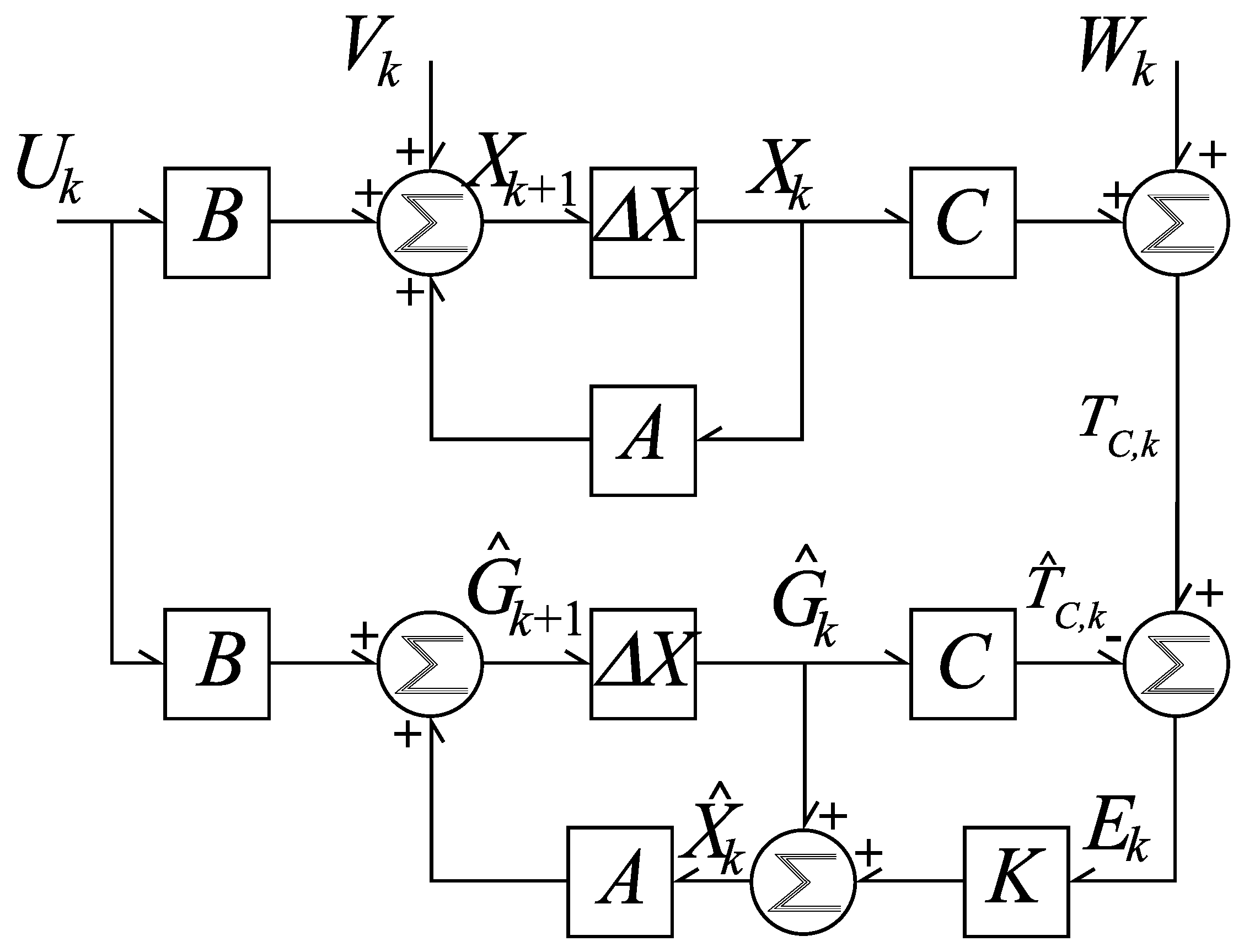
Model for Reconstruction of the Communication Times in a Telecontrol System
3. Results
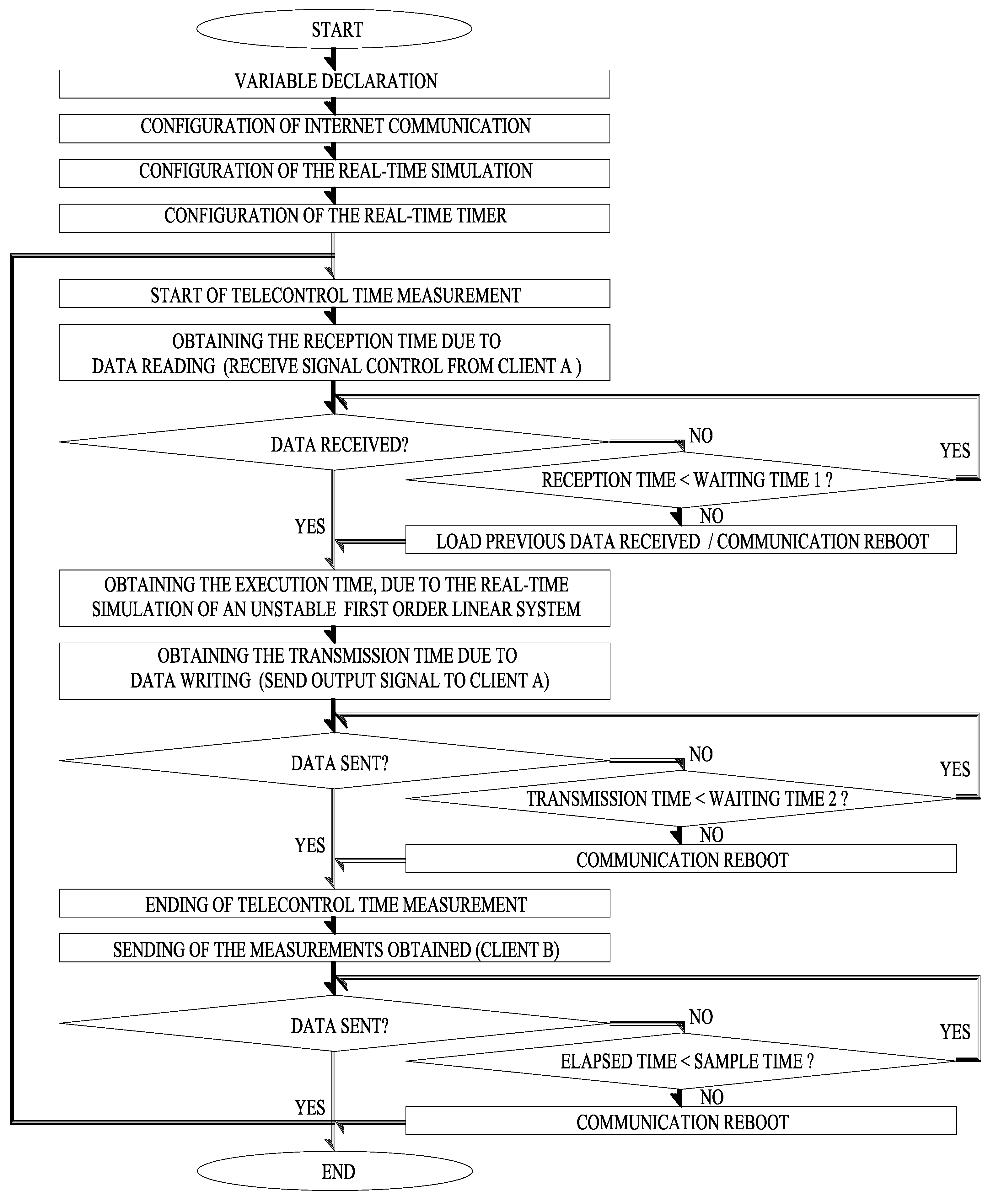
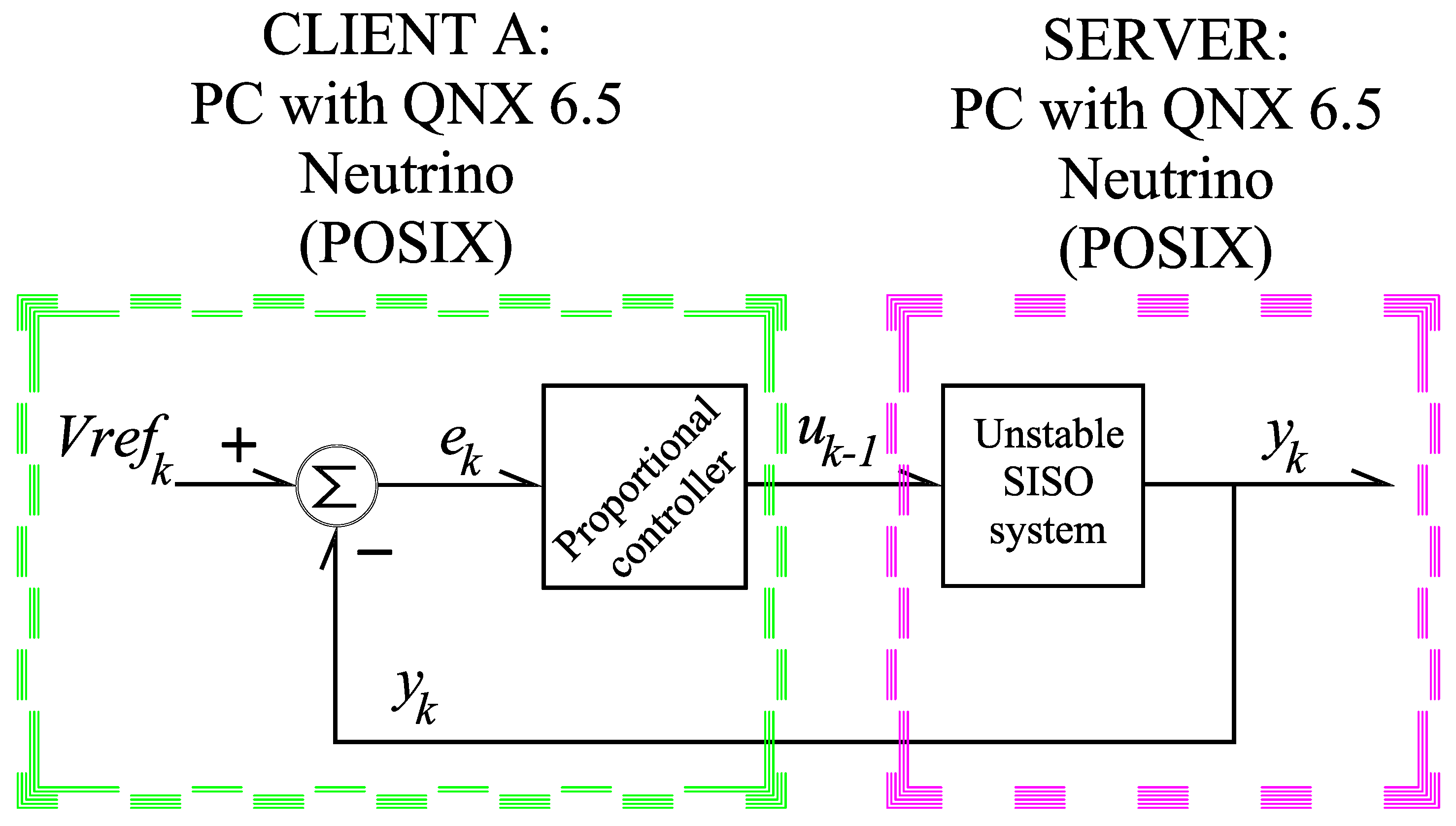
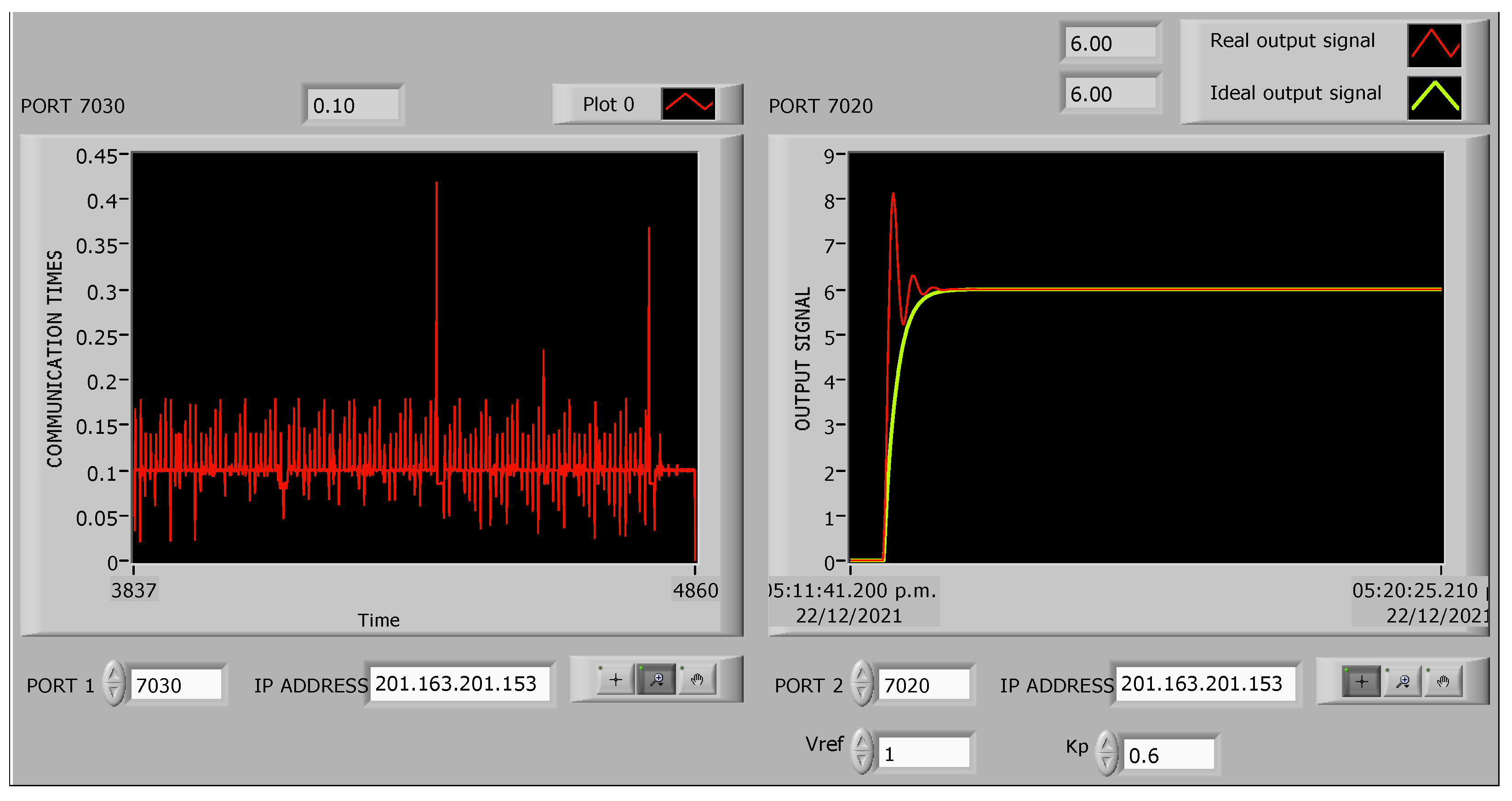
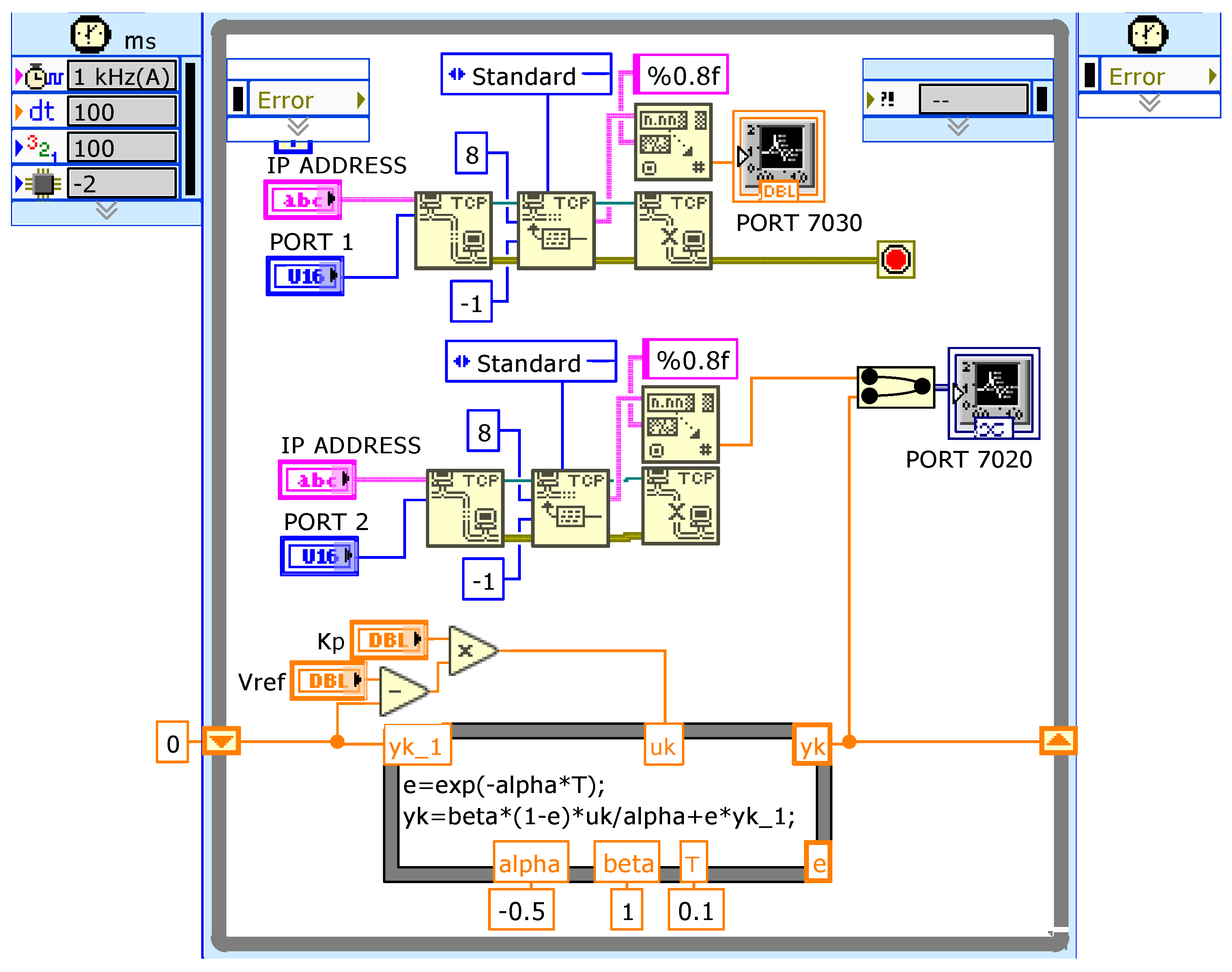
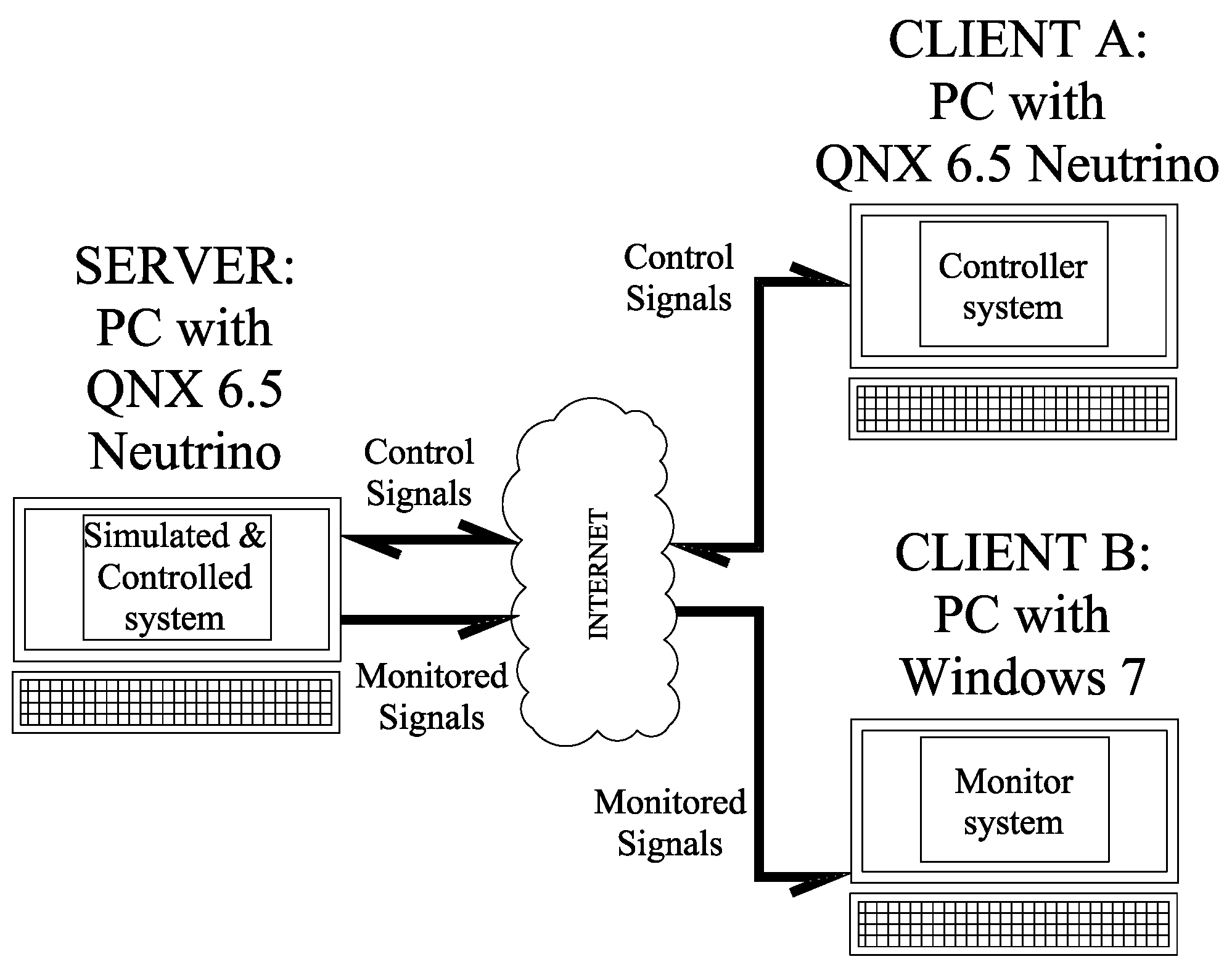
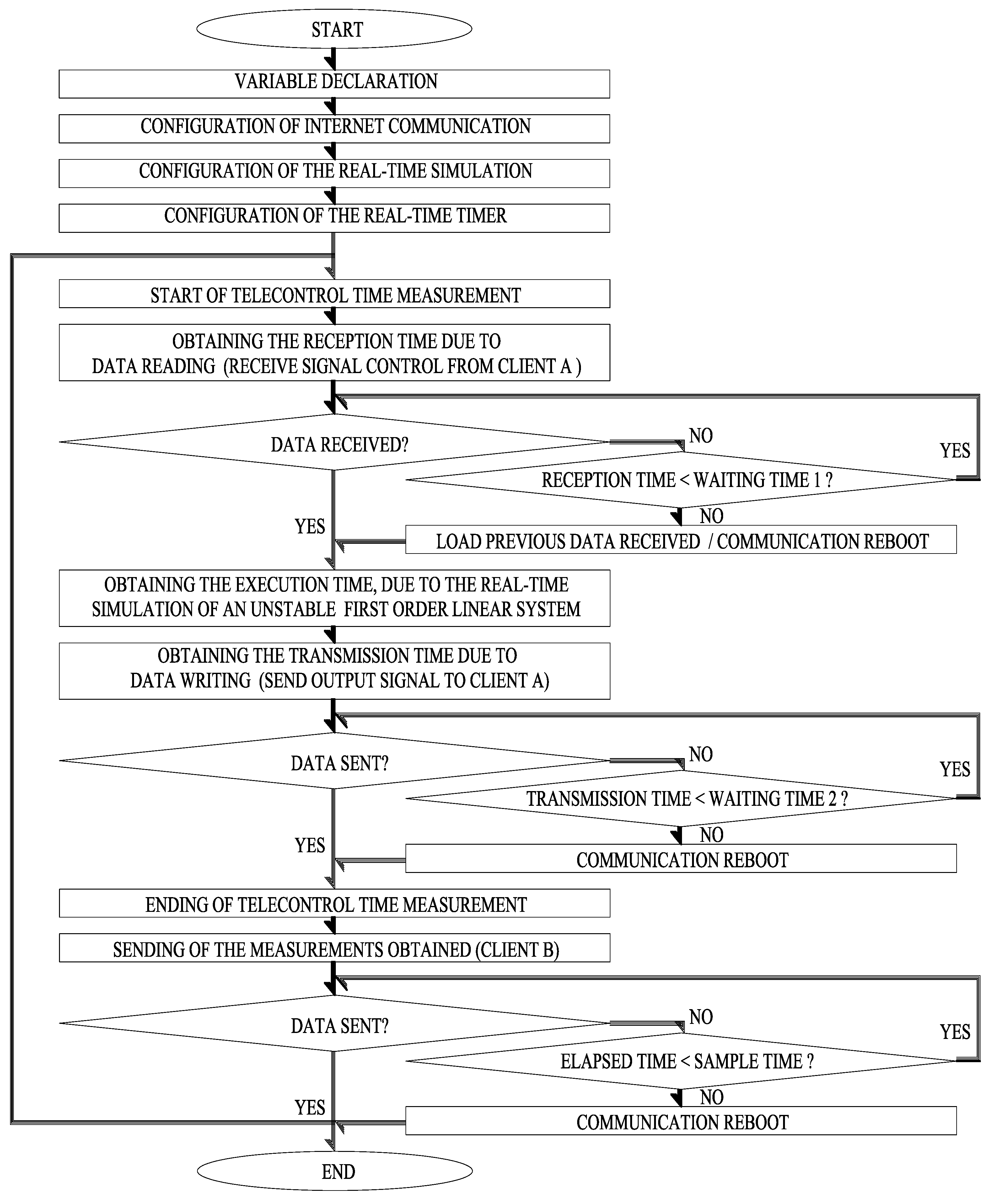
3.1. Telecontrol System Server
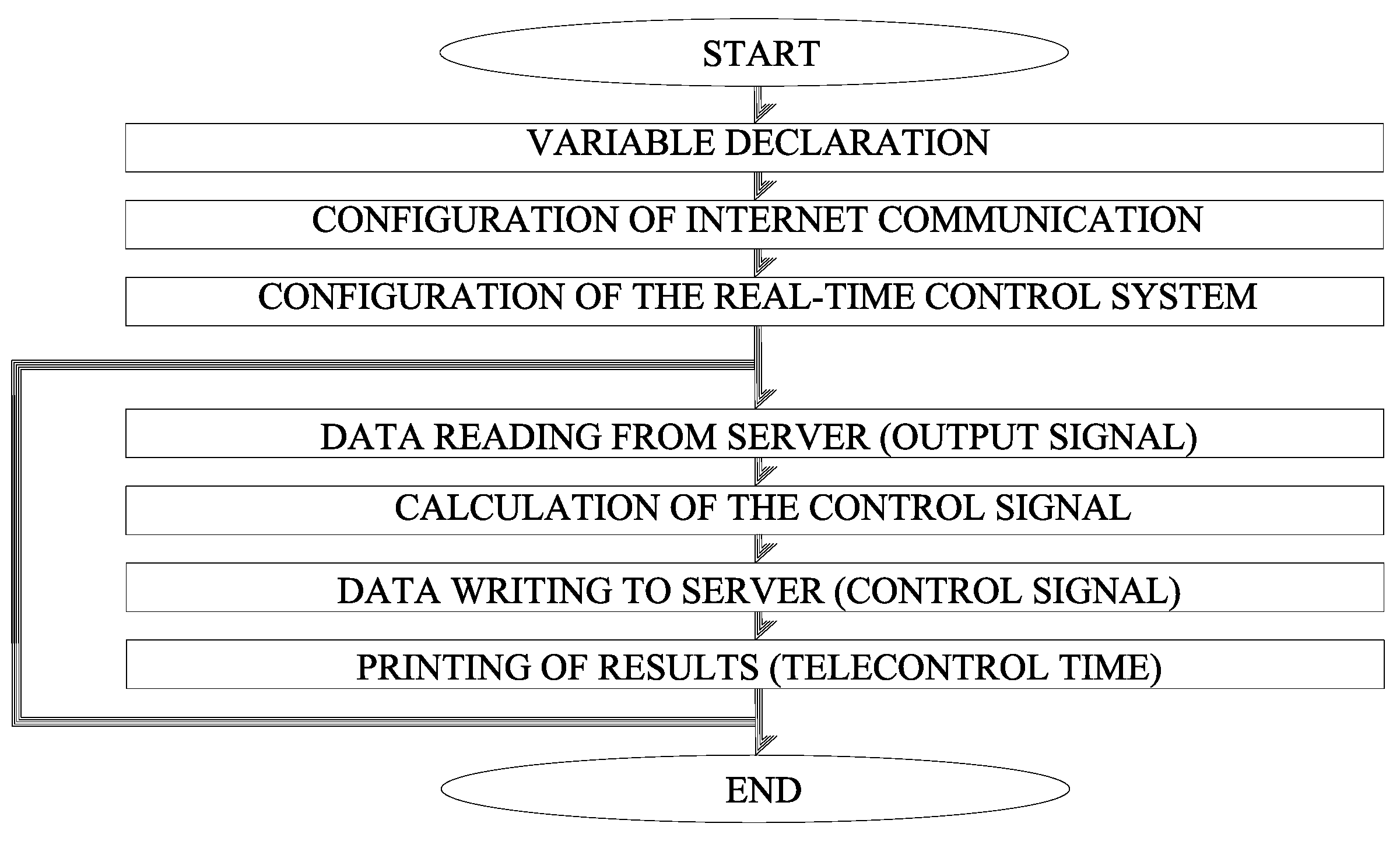
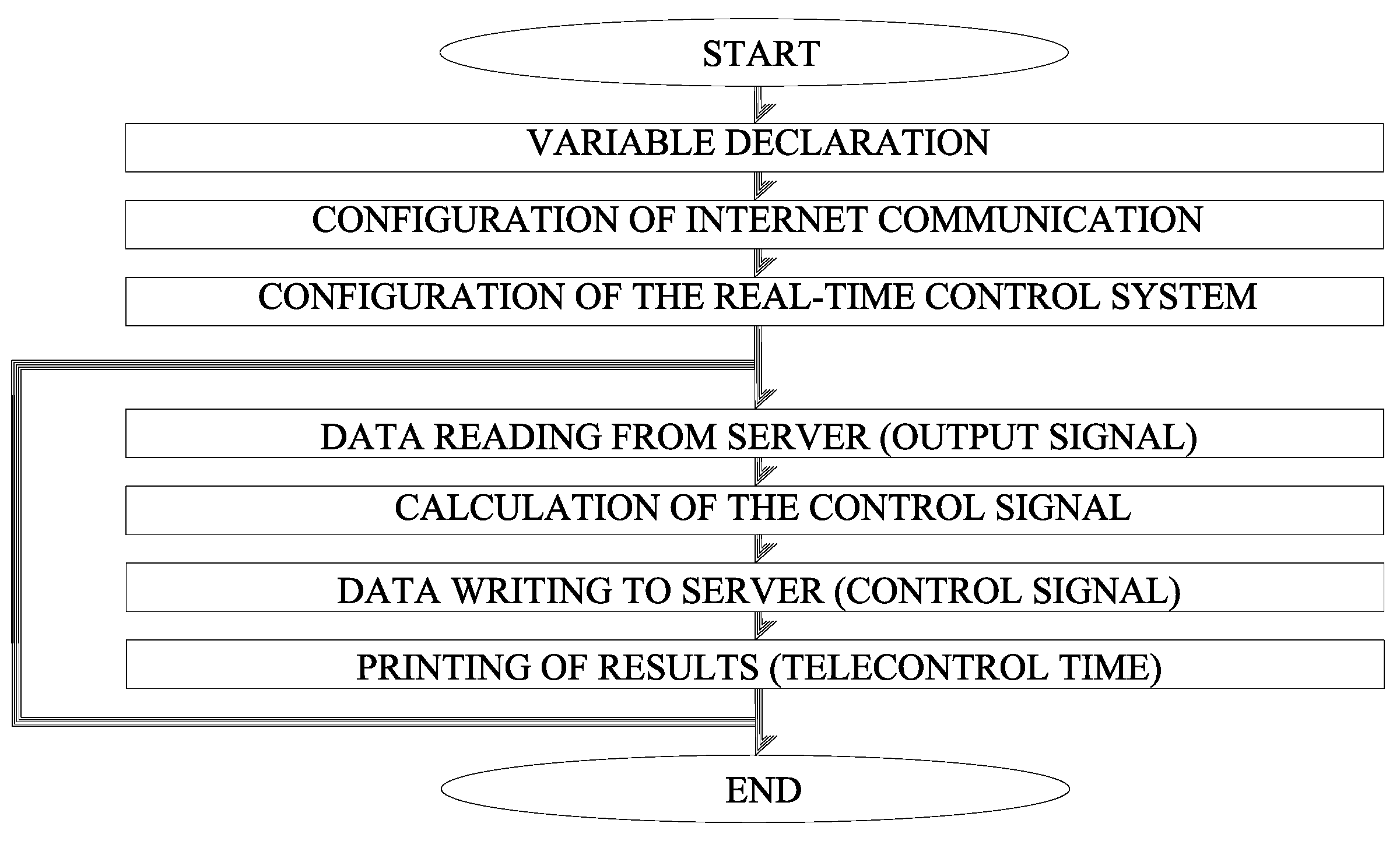
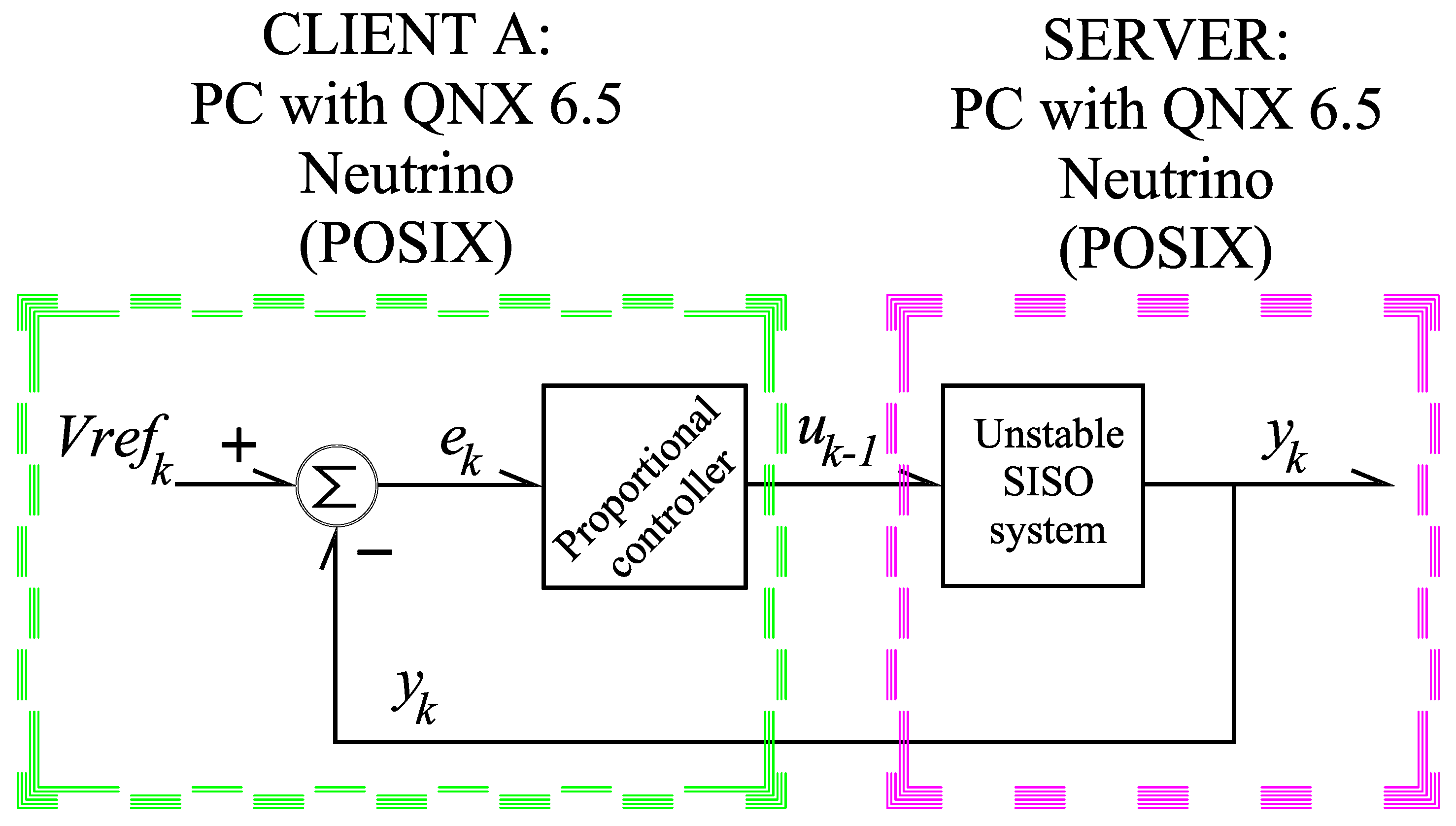
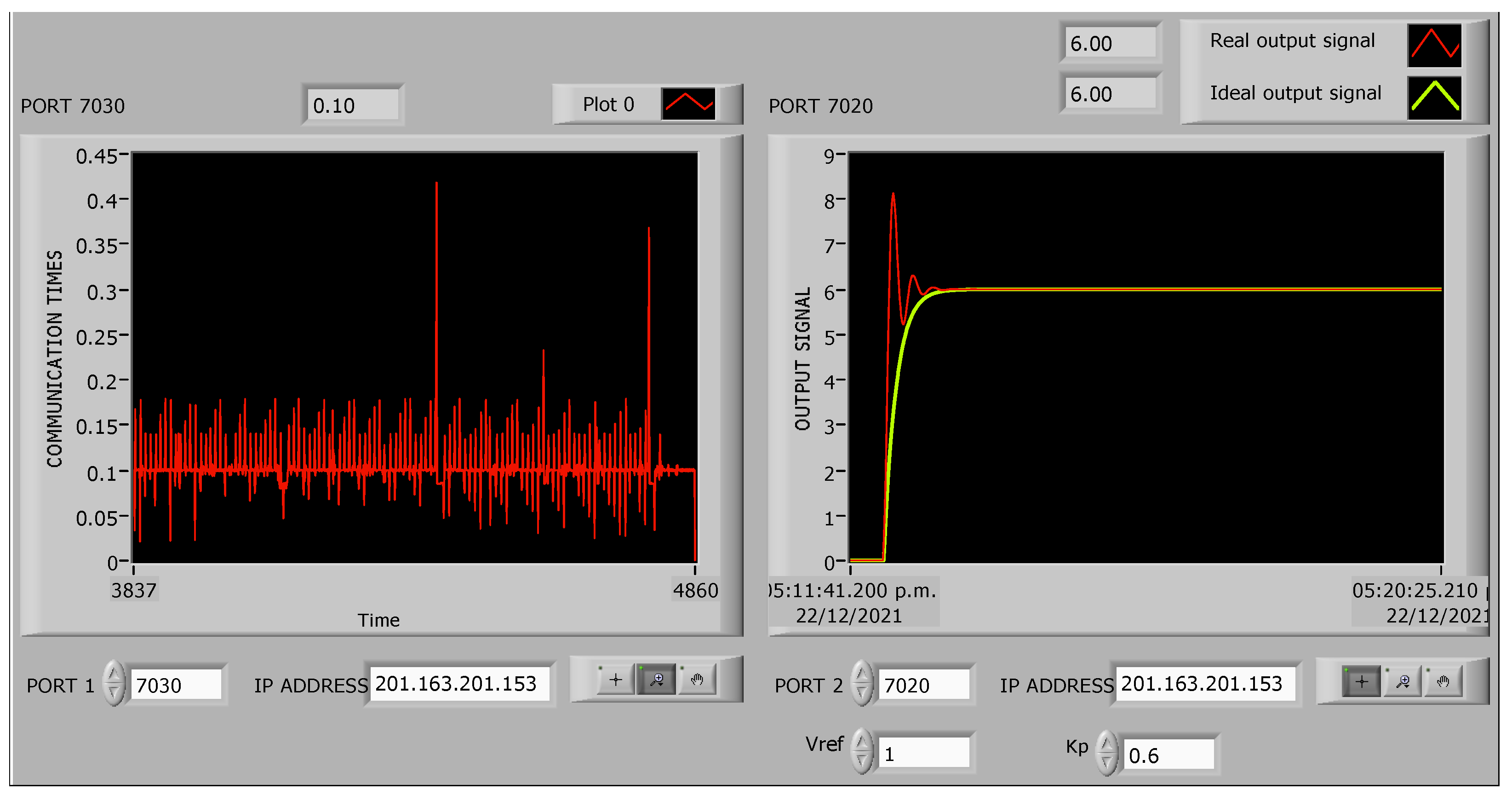
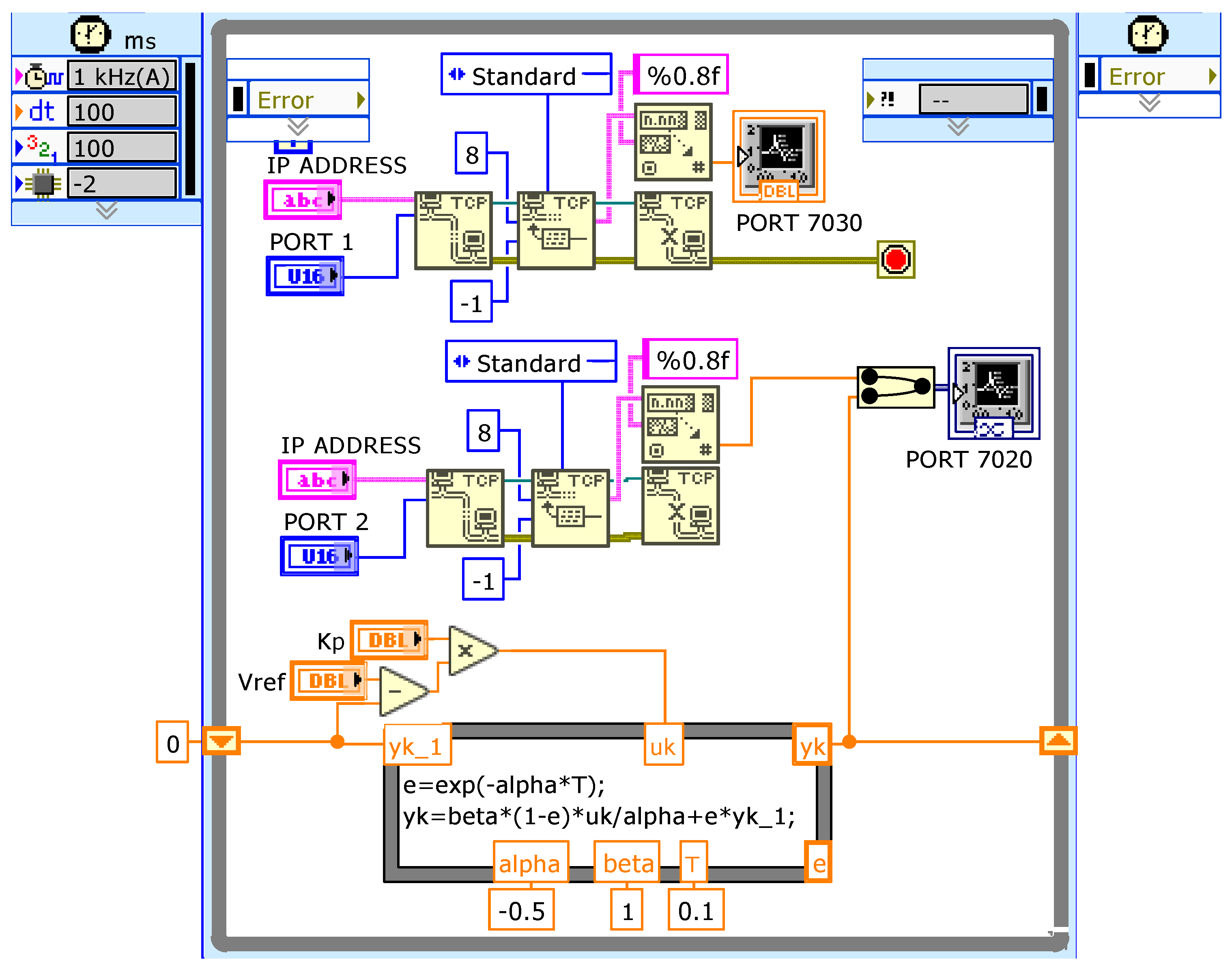
3.2. Client A of the Telecontrol System
3.3. Client B of the Telecontrol System
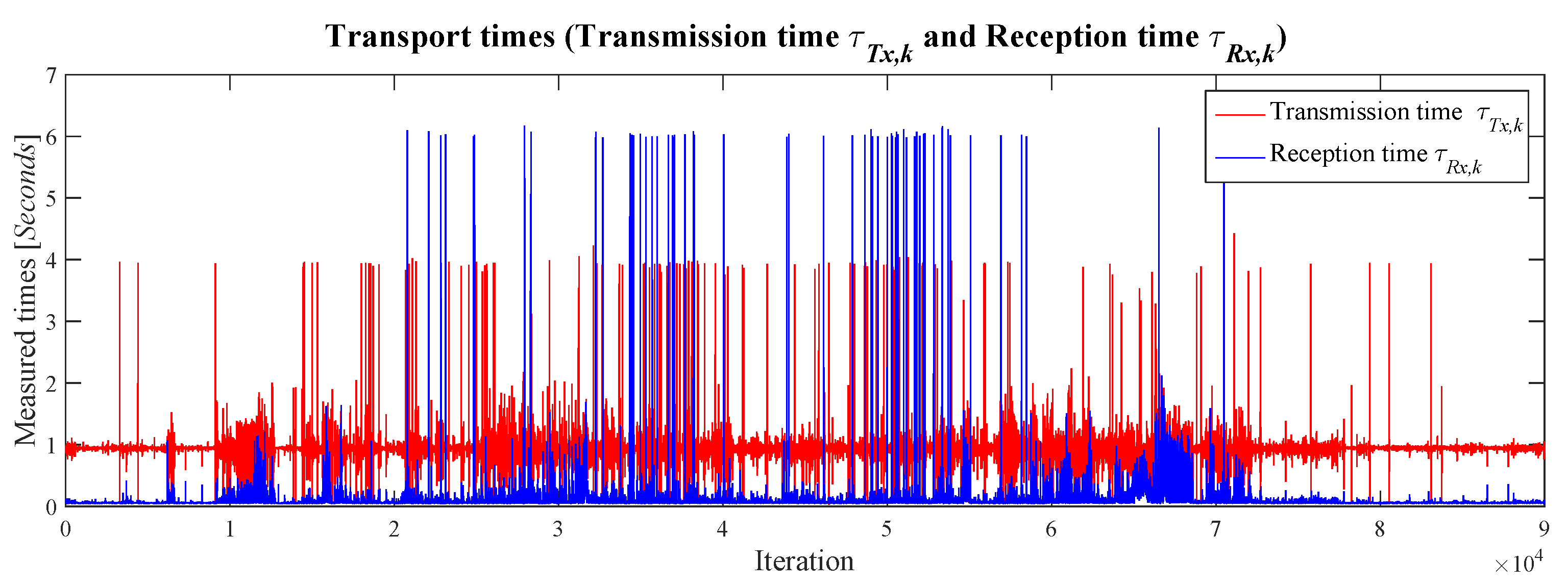
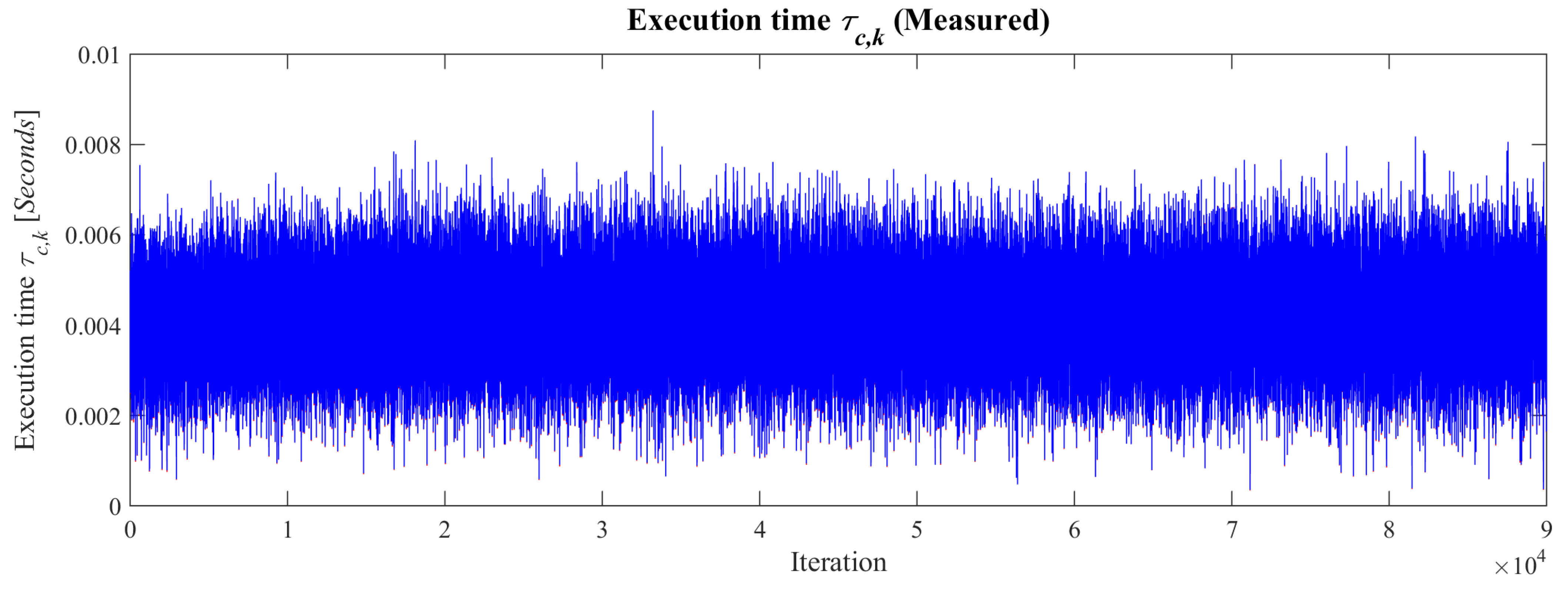
3.4. Characterization of Communication Times in Telecontrol Systems
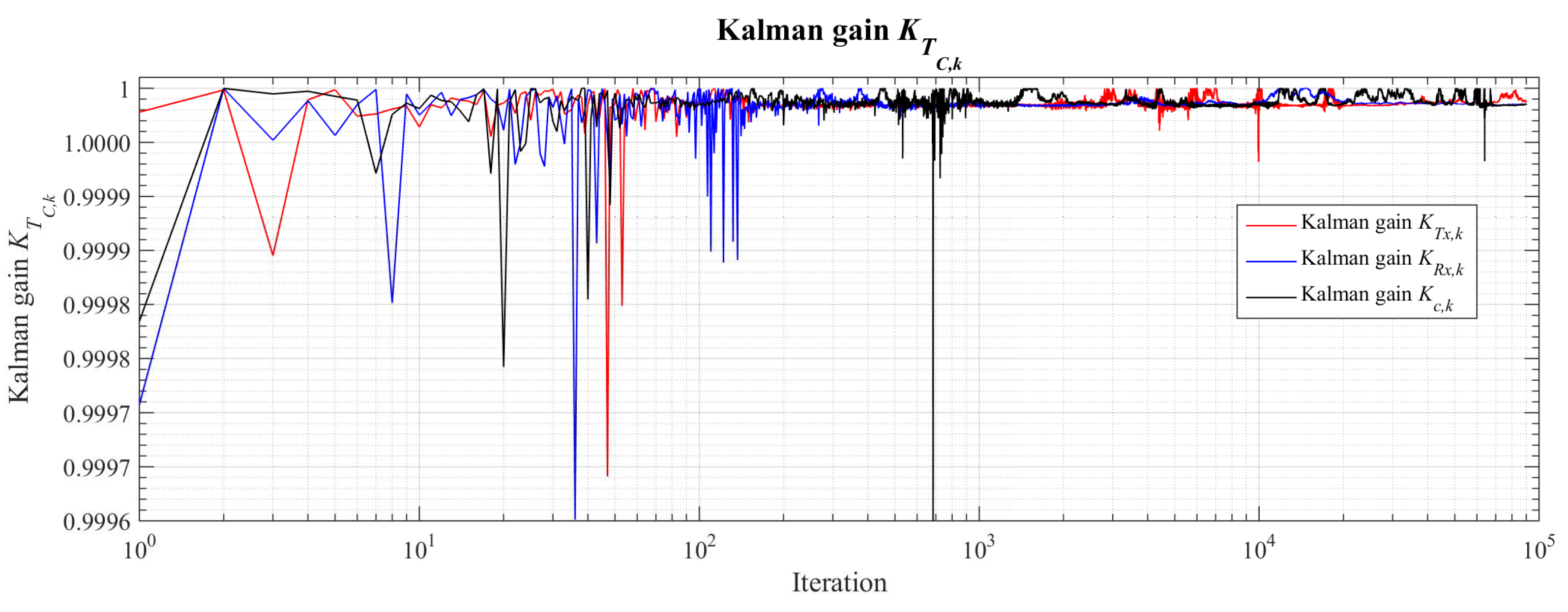
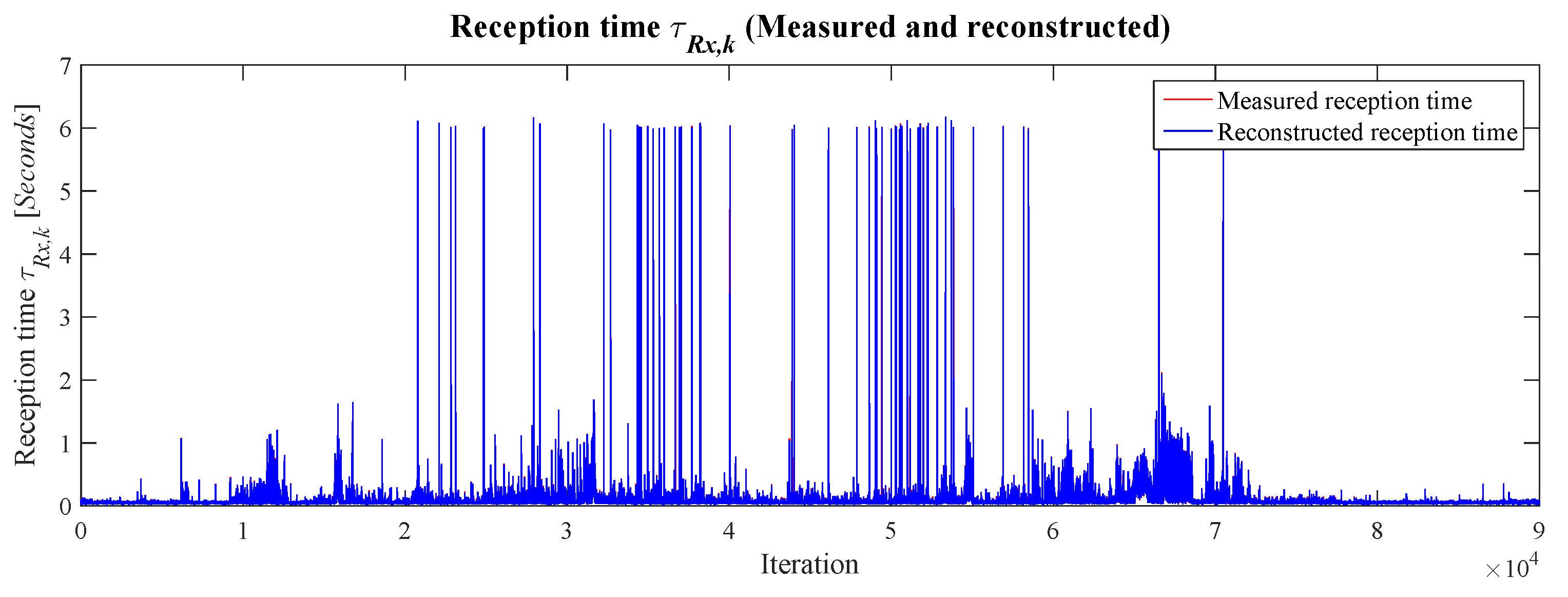
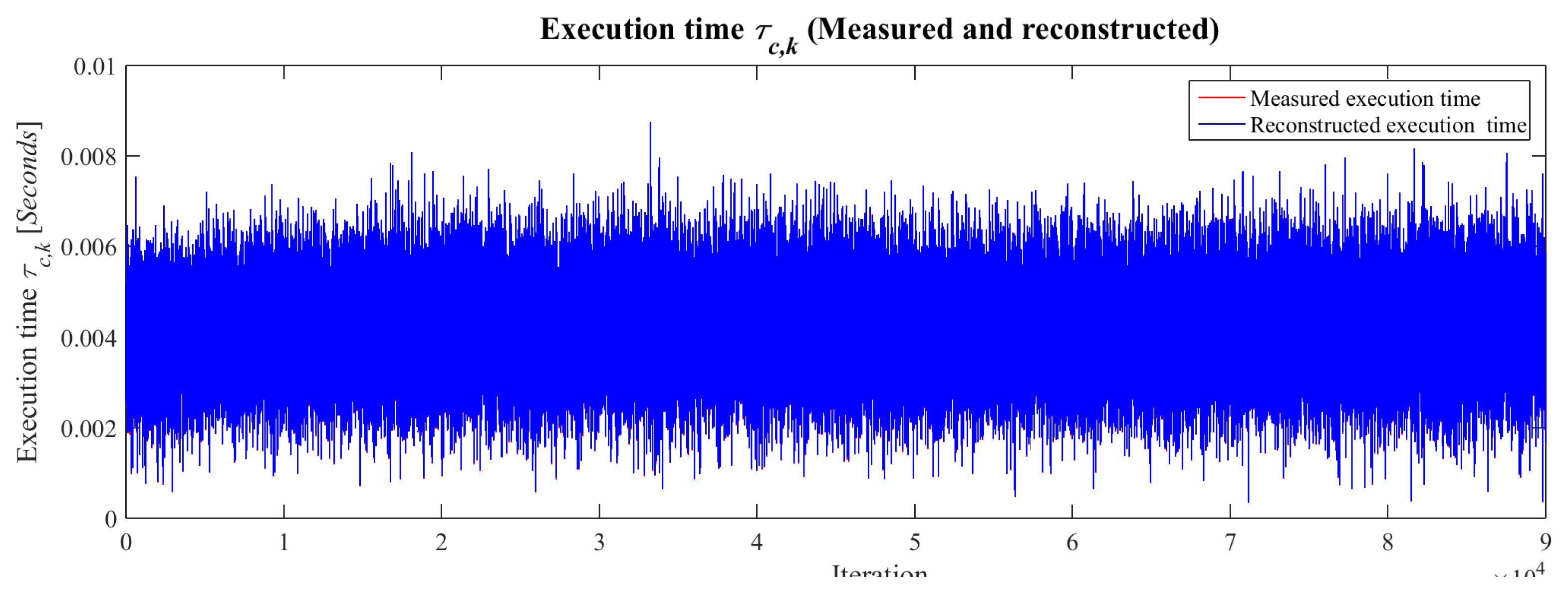
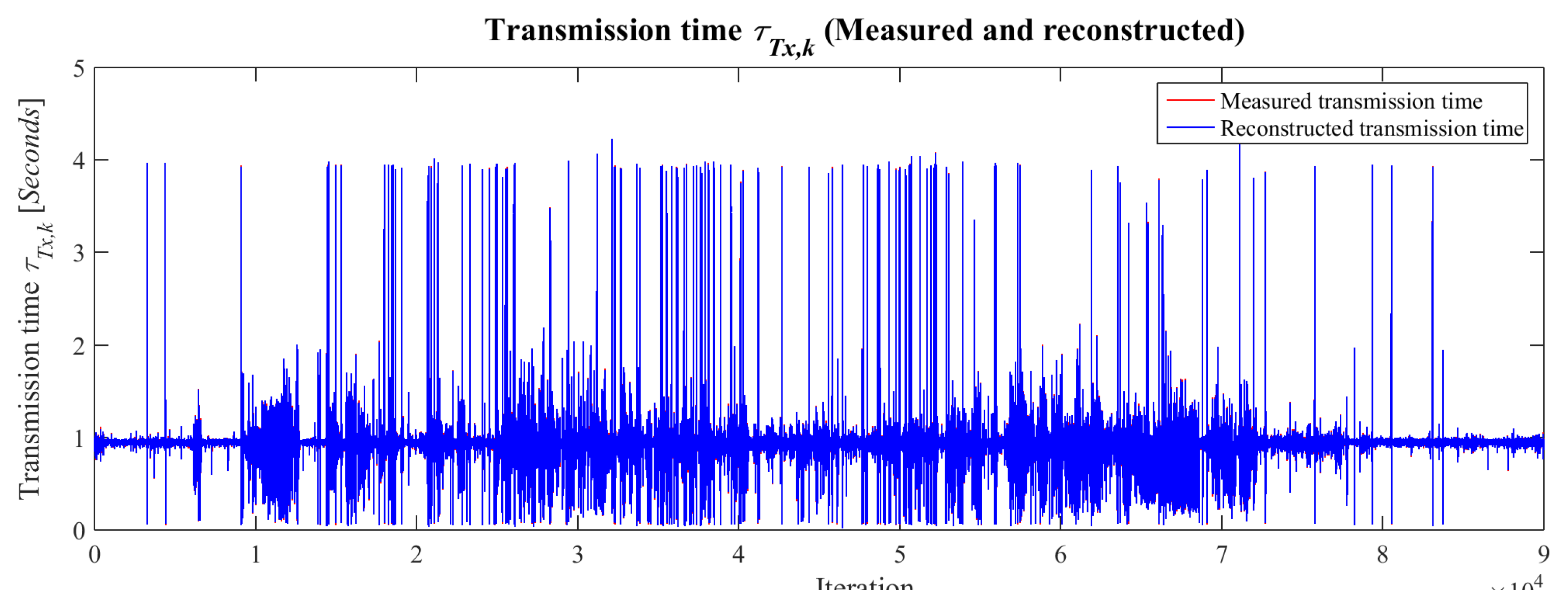
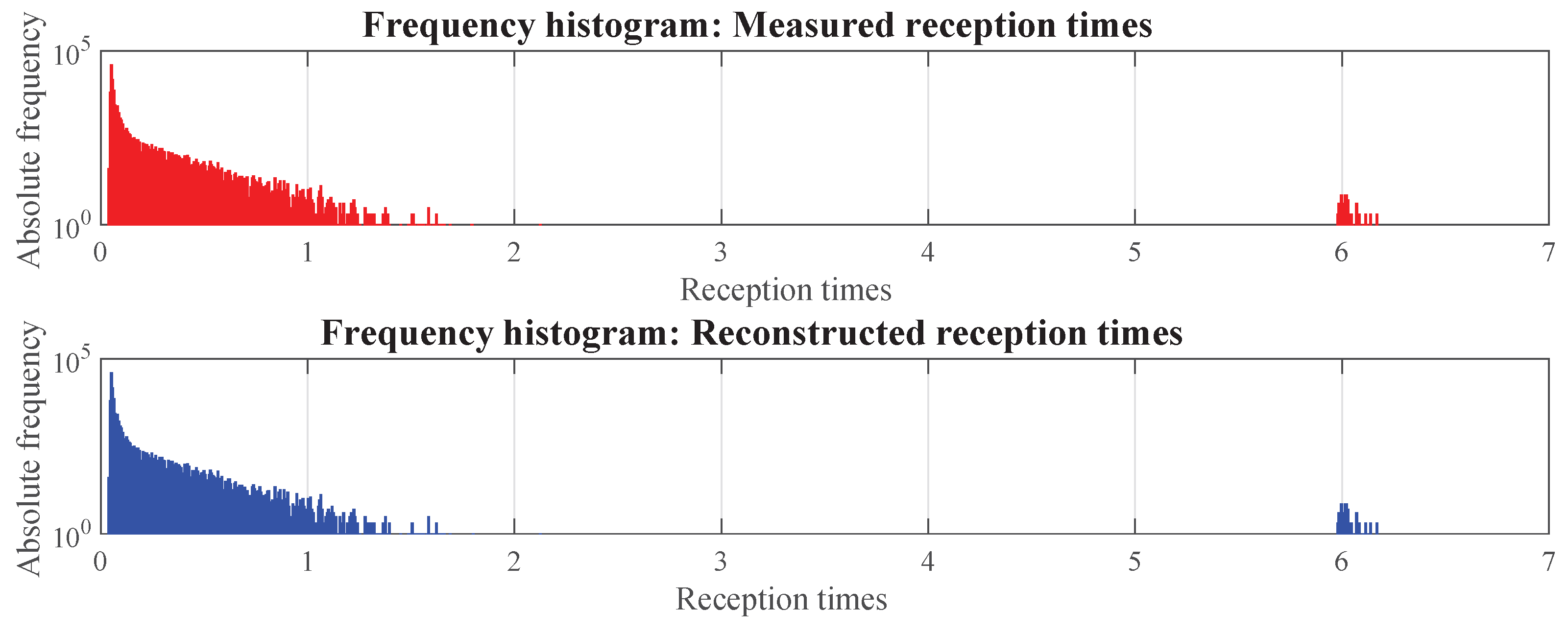
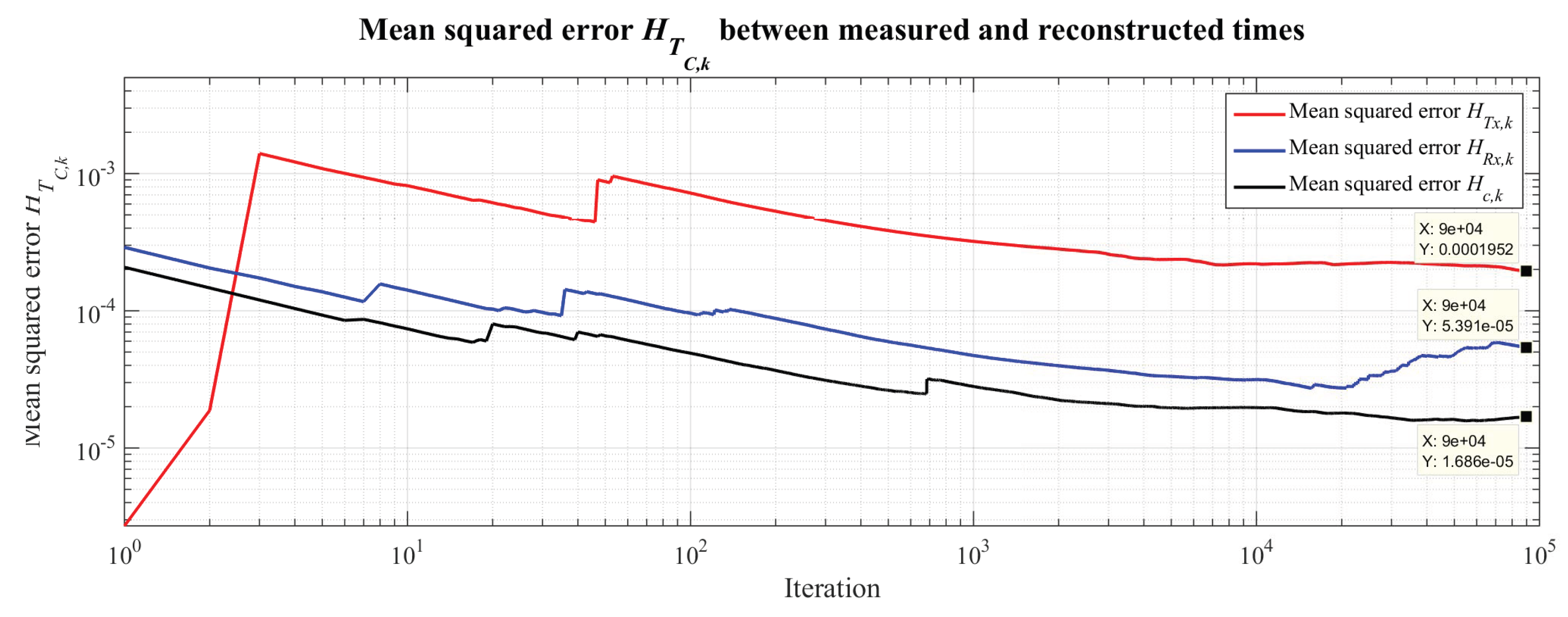
3.5. Reconstruction of Communication Times Using the Kalman Filter
4. Discussion
5. Conclusions
- Mean square error analysis.
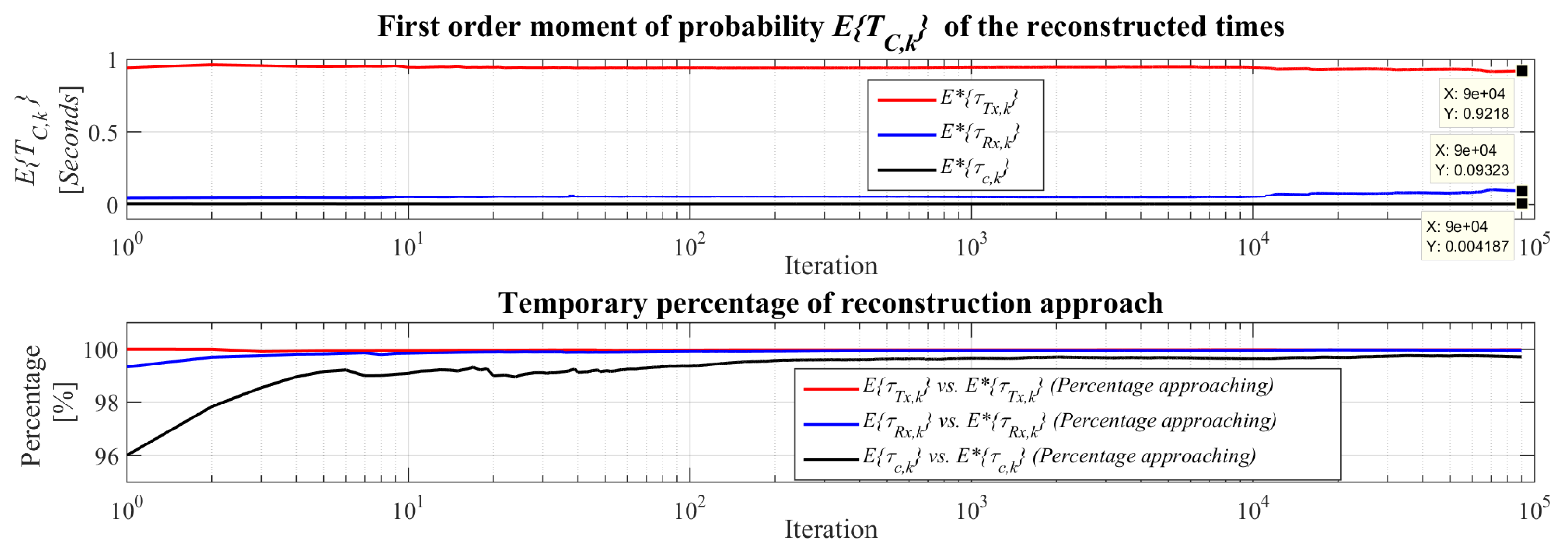
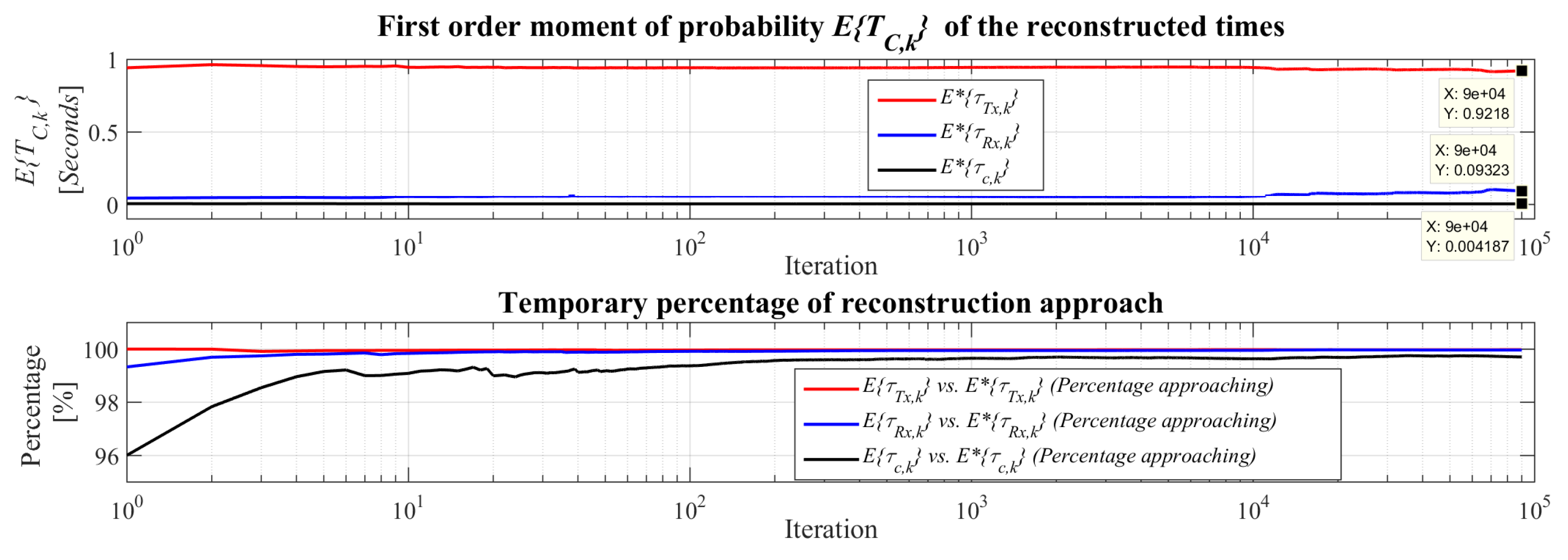
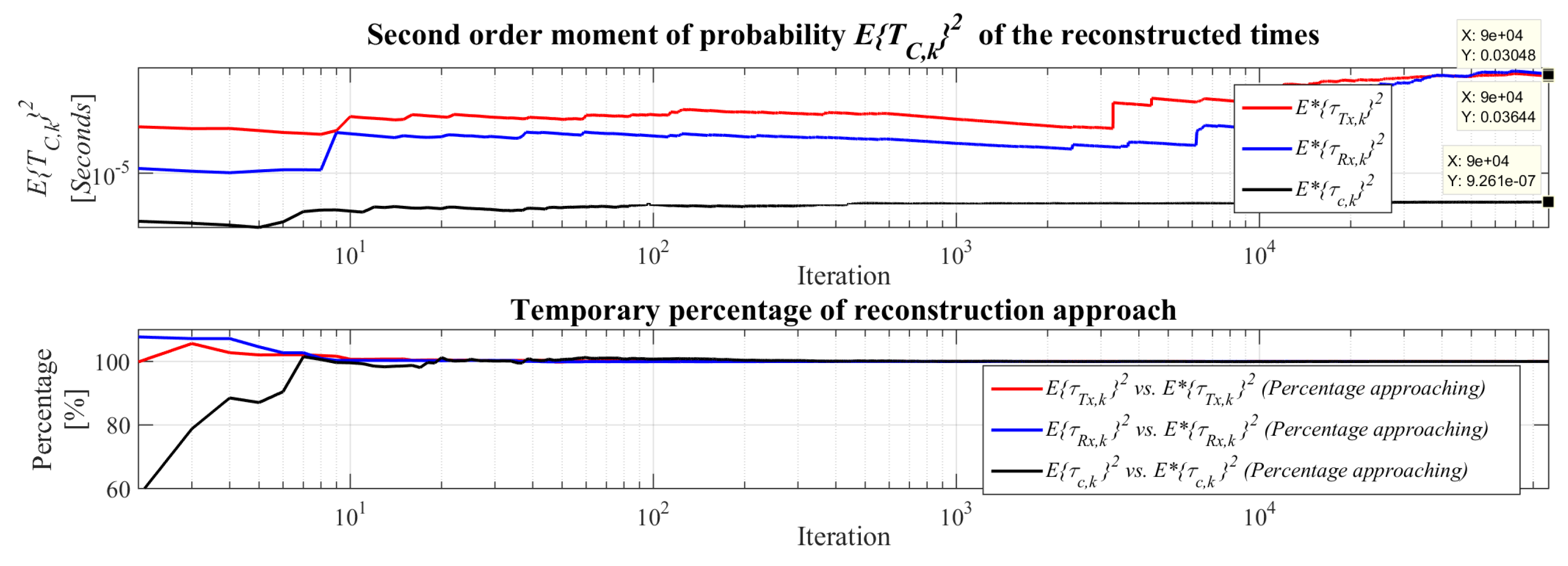
- Probability moment analysis
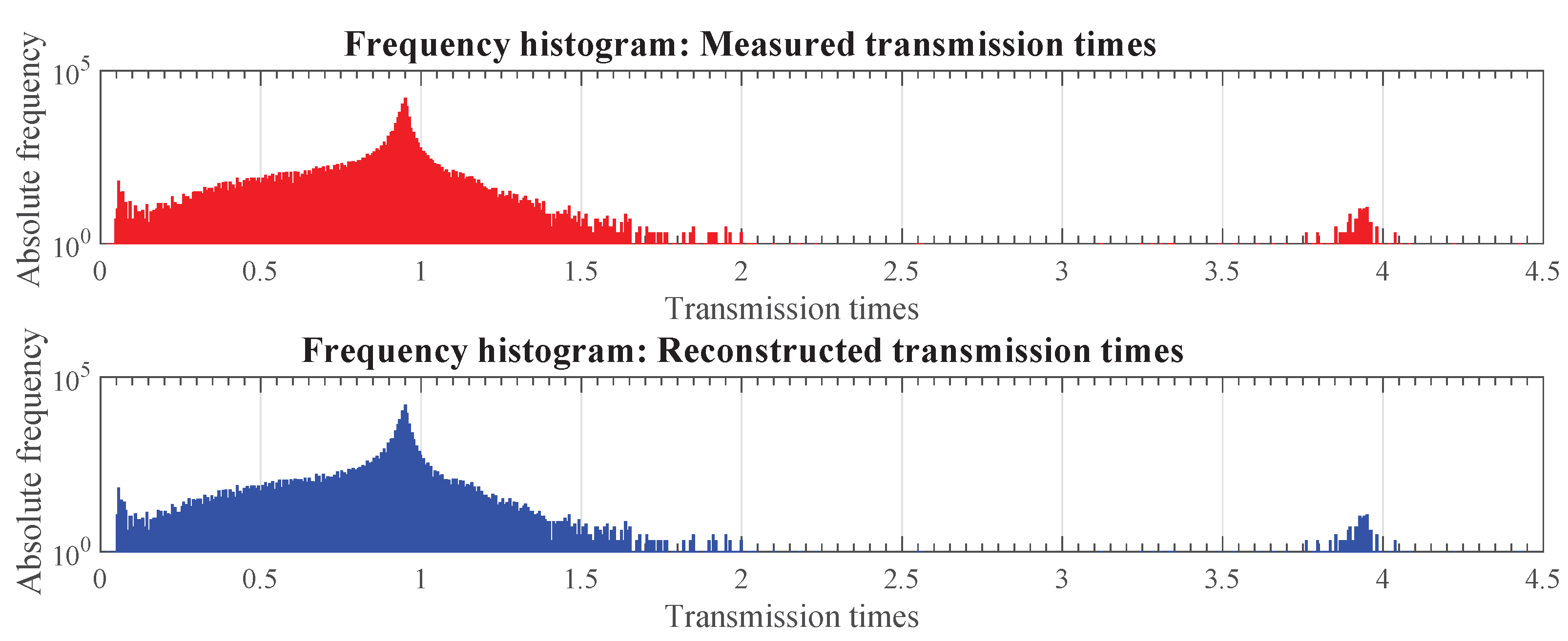
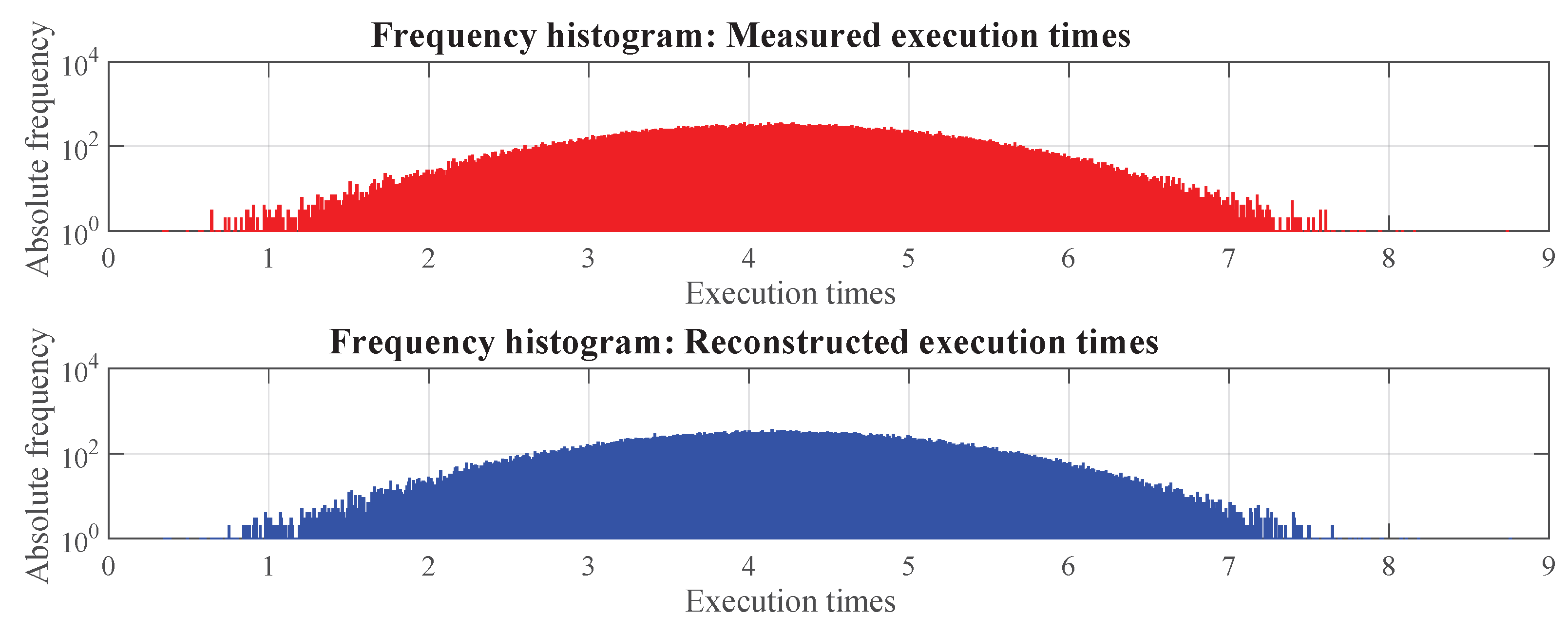
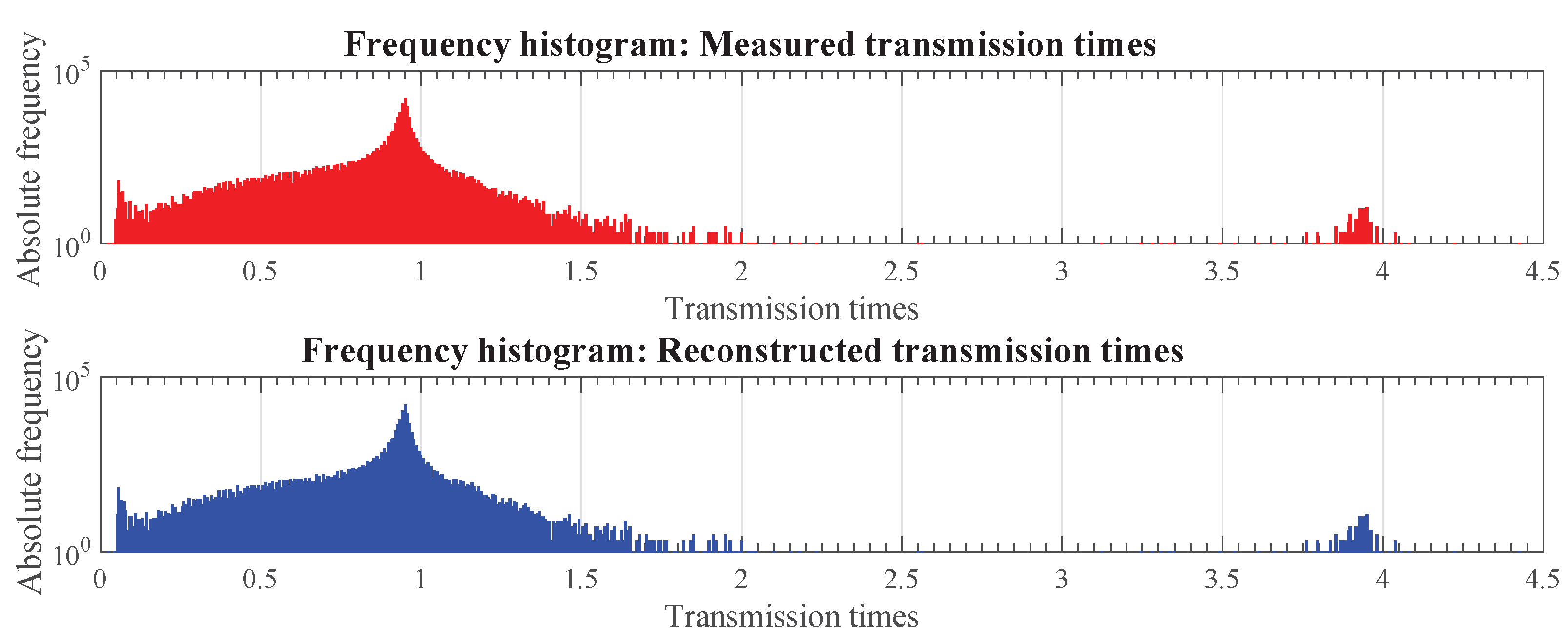
- Probability distribution analysis
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbols | Description |
| Communication time | |
| Telecontrol time | |
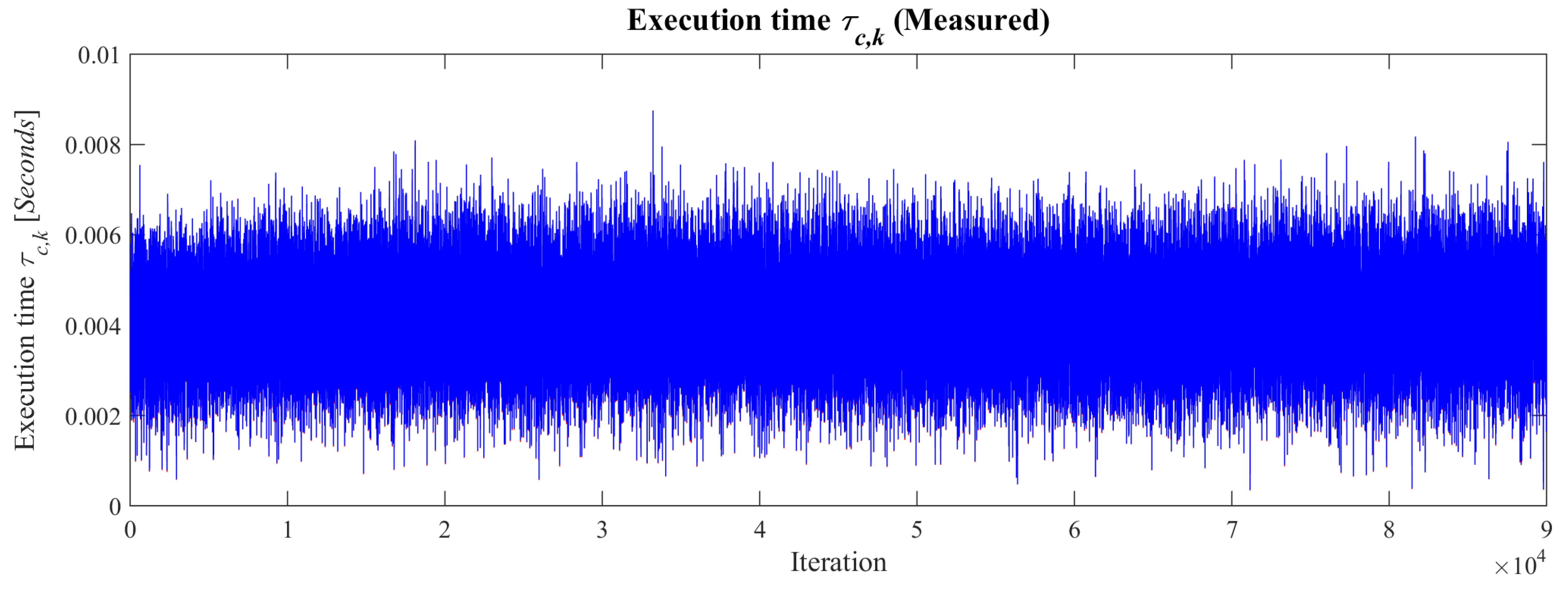
| Execution time | |
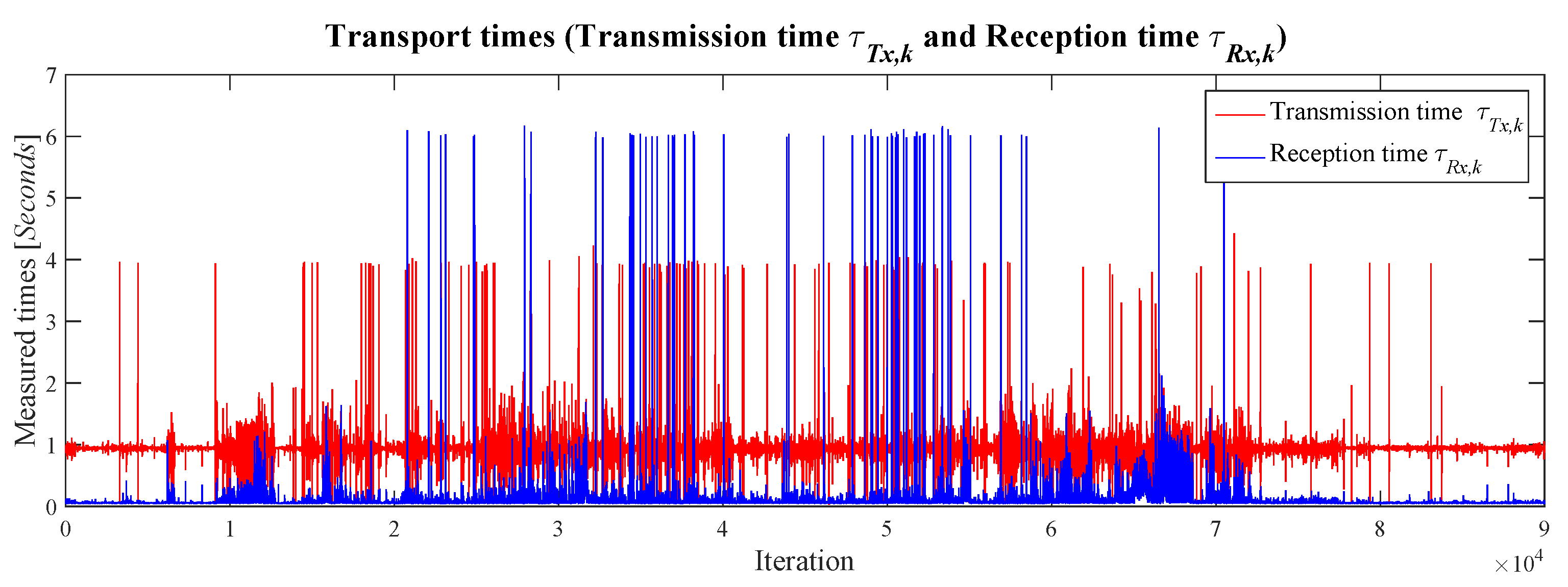
| Transport time | |
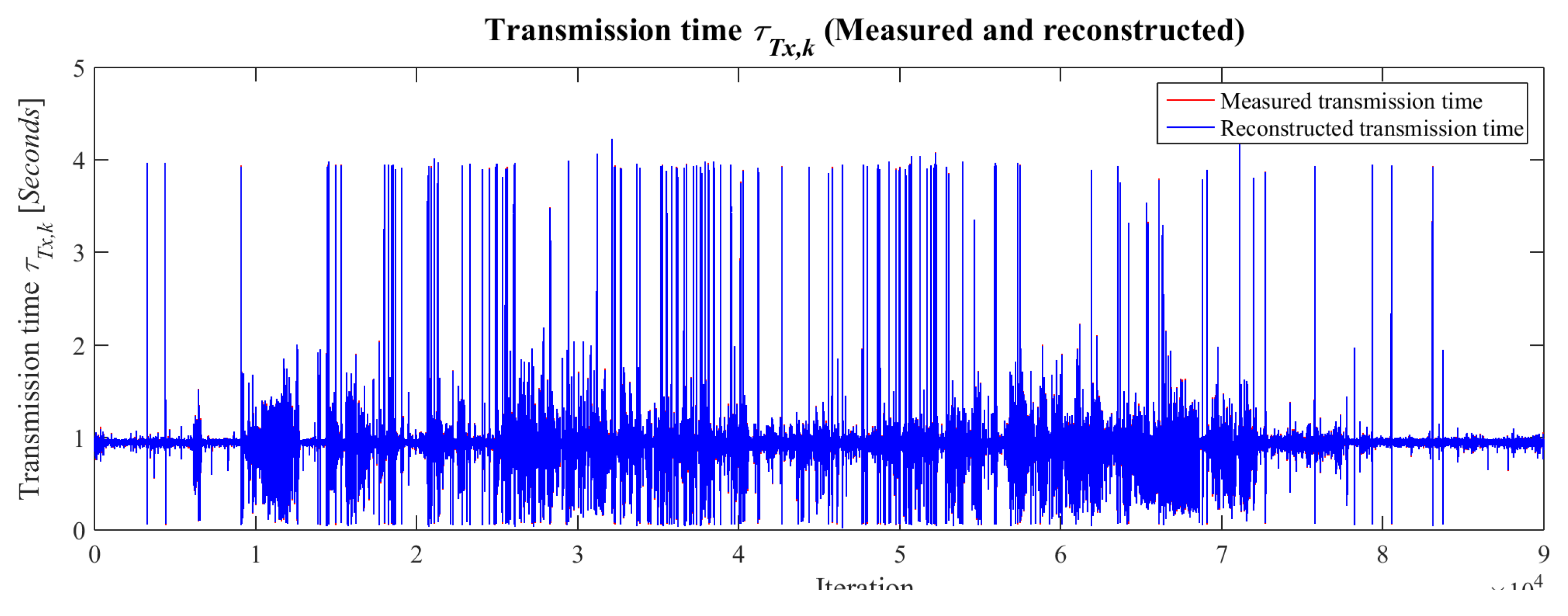
| Transmission time | |
| Reception time | |
| Deadline time | |
| Reconstructed communication time | |
| Estimated telecontrol time | |
| Estimated execution time | |
| Estimated transport time | |
| Estimated transmission time | |
| Estimated reception time | |
| States vector | |
| Initial conditions of estimated states vector | |
| System parameter matrix | |
| System input coefficient matrix | |
| System outputs coefficient matrix | |
| System input vector | |
| Noise associated with the input system | |
| Noise associated with the output system | |
| Prediction of the system internal state | |
| Estimated states vector | |
| Kalman gain | |
| Covariance matrix of states identification | |
| Covariance matrix of noise associated with output system | |
| Covariance matrix of identification error | |
| Covariance matrix of noise associated with input system | |
| Unstable first-order system transfer function | |
| Parameter of the numerator transfer function | |
| Parameter of the denominator transfer function | |
| Unstable first-order system output | |
| T | Unstable first-order system sampling period |
| Unstable first-order system input | |
| Unstable first-order system constant time | |
| Real-time task deadline | |
| Sub-deadline for the secondary RTT programmed for reception of data | |
| Sub-deadline for the secondary RTT programmed for transmission of data | |
| Proportional gain | |
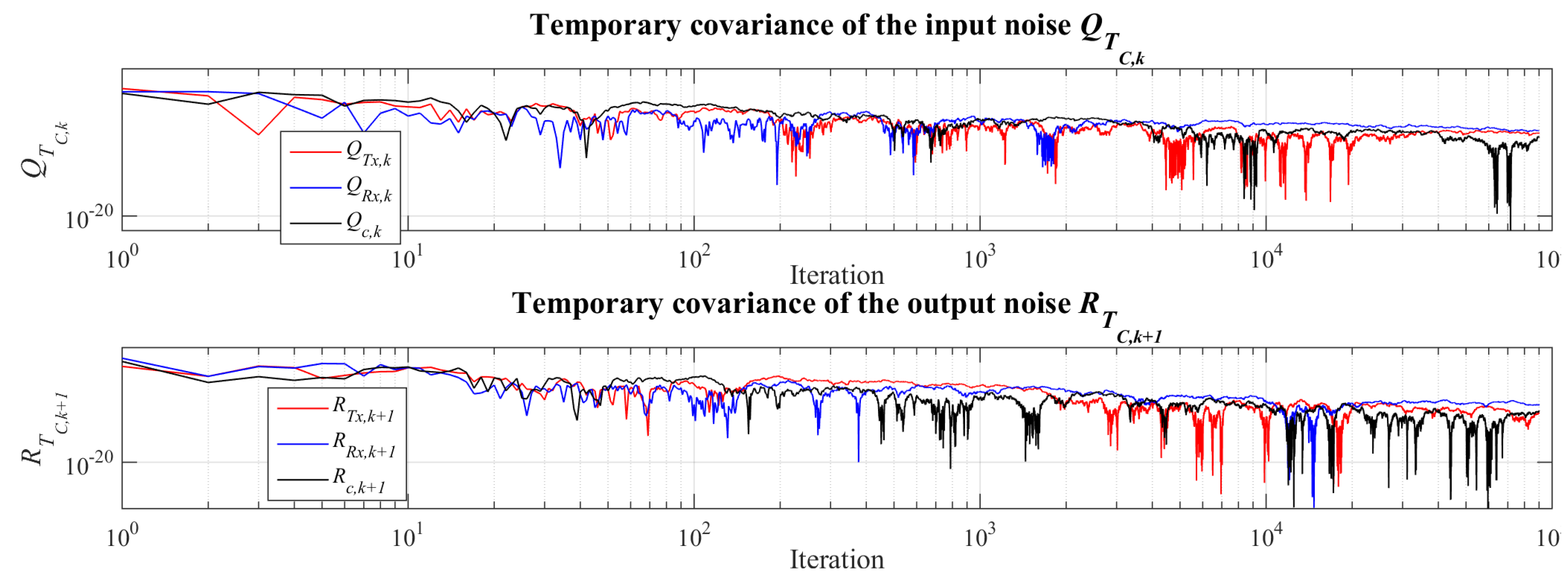
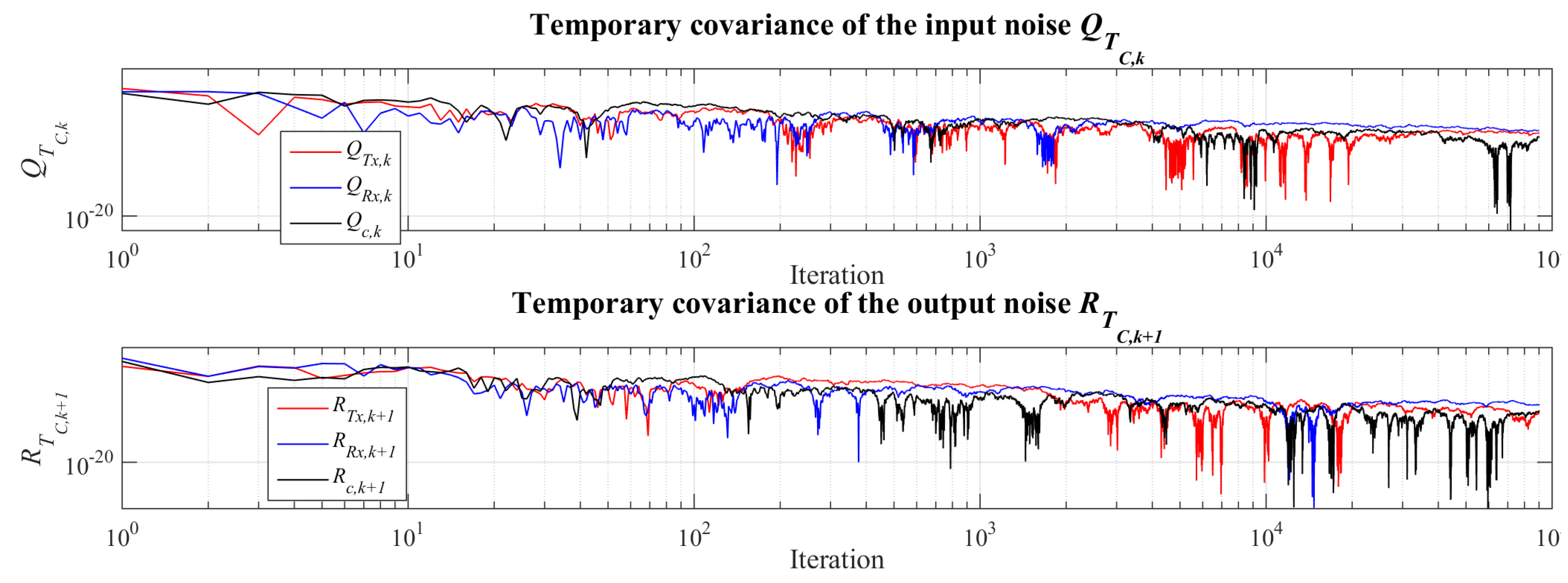
| Temporary covariance of input noise for communication time | |
| Temporary covariance of input noise for execution time | |
| Temporary covariance of input noise for transmission time | |
| Temporary covariance of input noise for reception time | |
| Temporary covariance of output noise for communication time | |
| Temporary covariance of output noise for execution time | |
| Temporary covariance of output noise for transmission time | |
| Temporary covariance of output noise for reception time | |
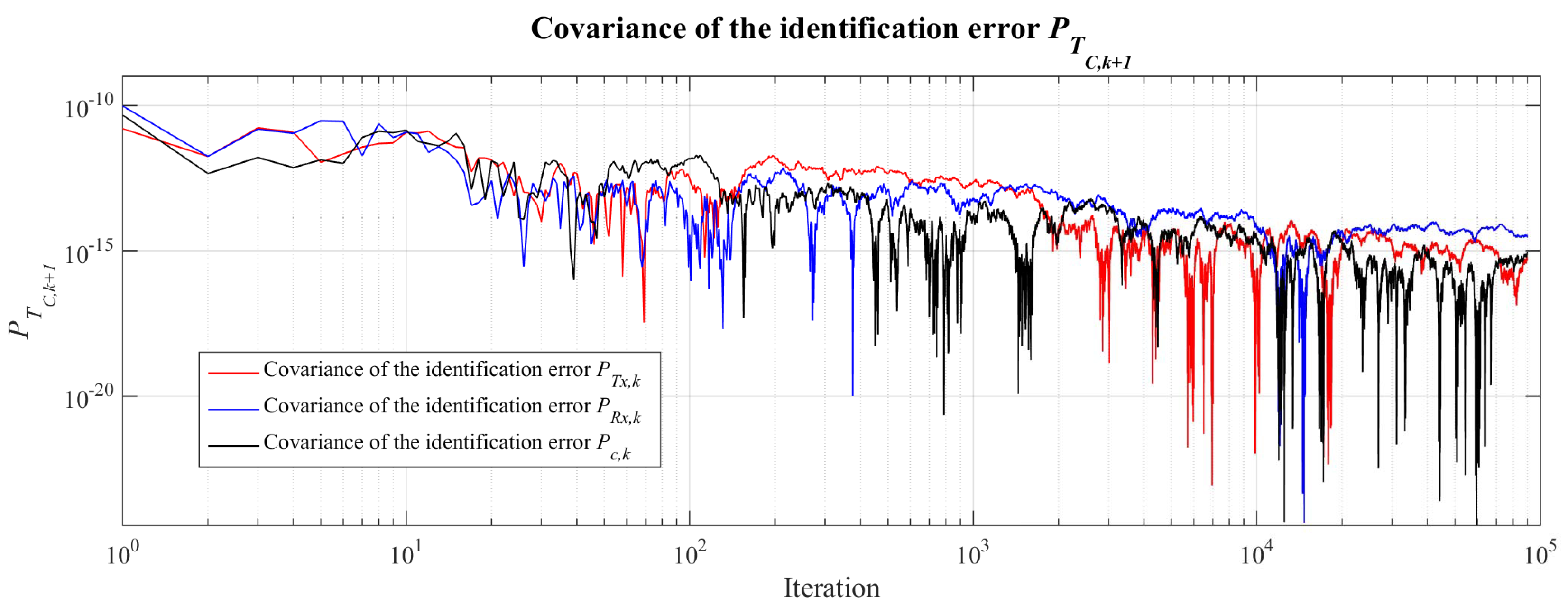
| Covariance of identification error for communication time | |
| Covariance of identification error for execution time | |
| Covariance of identification error for transmission time | |
| Covariance of identification error for reception time | |
| First order moment of probability for communication time | |
| First order moment of probability for execution time | |
| First order moment of probability for transmission time | |
| First order moment of probability for reception time | |
| Second order moment of probability for communication time | |
| Second order moment of probability for execution time | |
| Second order moment of probability for transmission time | |
| Second order moment of probability for reception time | |
| Error for communication time | |
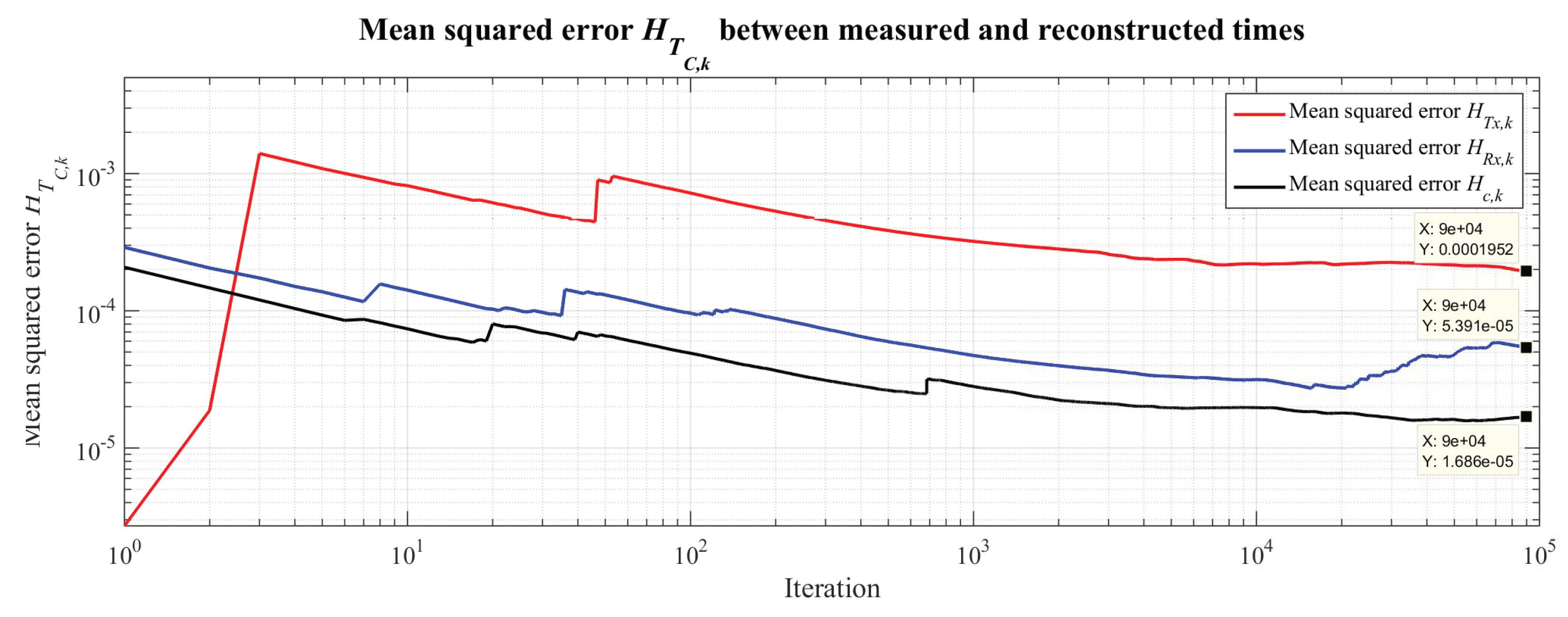
| Mean squared error between and | |
| Mean squared error between and | |
| Mean squared error between and | |
| Mean squared error between and |
References
- Chessen, R.; Goldberg, N.; Piñeres, D. Comments of NCTA—The Internet & Television Association; NCTA—The Internet & Television Association: Washington, DC, USA, 2021; pp. 1–2. [Google Scholar]
- Valdez Martínez, J.S. Medición, Caracterización y Reconstrucción de los Tiempos de Ejecución y Transporte para Sistemas de Telecontrol en Tiempo Real. Ph.D. Thesis, Instituto Politécnico Nacional, Mexico City, Mexico, 2015; pp. 1–210. [Google Scholar]
- Valdez Martínez, J.S.; Guevara López, P. Measurement, Characterization and Reconstruction of Computing Time and Transporting Time for Real-Time Telecontrol Systems. Comput. Sist. 2019, 23, 531–546. [Google Scholar] [CrossRef]
- Nyquist, H. Certain Topics in Telegraph Transmission Theory. Trans. Am. Inst. Electr. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]
- Kotel’nikov, V.A. On the transmission capacity of “ether” and wire in electrocomunications. Phys.-Uspekhi 2006, 49, 736. [Google Scholar] [CrossRef]
- Padilla, J.J. Análisis del Comportamiento del tráfico en Internet durante la Pandemia del COVID-19: El caso de Colombia. Entre Cienc. Ing. 2020, 14, 26–33. [Google Scholar] [CrossRef]
- Valdés, L.; Ariza, A.; Allende, S.M.; Triviño, A.; Joya, G. Search of the Shortest Path in a Communication Network with Fuzzy Cost Functions. Symmetry 2021, 13, 1534. [Google Scholar] [CrossRef]
- Alzate, M.; Peña, N. Modelos de Tráfico en Análisis y Control de Redes de Comunicaciones. Rev. Ing. 2004, 9, 63–87. [Google Scholar]
- Kumar, V. Deep Neural Network Approach to Estimate Early Worst-Case Execution Time. CoRR 2021, arXiv:abs/2108.02001. [Google Scholar]
- Stappert, F.; Altenbernd, P. Complete Worst-Case Execution Time Analysis of Straight-line Hard Real Time Programs. J. Syst. Archit. Euromicro J. 2000, 46, 339–355. [Google Scholar] [CrossRef]
- Bernat, G.; Colin, A.; Petters, S.M. PWCET: A tool for probabilistic Worst-Case Execution Time Analysis of Real-Time Systems; Technical Report YCS-2003-353; Department of Computer Science, University of York: York, UK, 2003; pp. 1–18. [Google Scholar]
- Singh, A.; Nguyen, M.; Purawat, S.; Crawl, D.; Altintas, I. Modular Resource Centric Learning for Workflow Performance Prediction. arXiv 2017, arXiv:1711.05429. [Google Scholar]
- Kshemkalyani, A.; Singhal, M. Chapter 15: Failure detectors. In Distributed Computing Principles, Algorithms, and Systems; Cambridge University Press: New York, NY, USA, 2011; pp. 567–597. [Google Scholar]
- Hartmanis, J.; Stearns, R.E. On the computational complexity of algorithms. Trans. Am. Math. Soc. 1965, 117, 285–306. [Google Scholar] [CrossRef]
- Delgado-Reyes, G.; Valdez-Martínez, J.S.; Hernández-Pérez, M.A.; Pérez-Daniel, K.R.; García-Ramírez, P.J. Quadrotor Real-Time Simulation: A Temporary Computational Complexity-Based Approach. Mathematics 2022, 10, 2032. [Google Scholar] [CrossRef]
- Valdez Martínez, J.S.; Guevara Lopez, P.; Delgado Reyes, G. Execution Times Reconstruction in a LTI System Real-time Simulation. IEEE Lat. Am. Trans. 2014, 12, 277–284. [Google Scholar] [CrossRef]
- Valdez Martínez, J.S.; Delgado Reyes, G.; Guevara Lopez, P.; Garcia Infante, J.C. Reconstruction of the execution times dynamics of real-time tasks by fuzzy digital filtering. Rev. Fac. Ing. Univ. Antioq. 2014, 70, 155–166. [Google Scholar]
- Medel Juarez, J.J. Analysis of two estimation methods for stationary and invariant in time linear systems with disturbances correlated with the observable state of the type: One input one output. Comput. Sist. 2002, 5, 215–222. [Google Scholar]
- Soderstrom, T.; Stoica, P. On some system identification techniques for adaptive filtering. IEEE Trans. Circuits Syst. 1988, 35, 457–461. [Google Scholar] [CrossRef]
- Garcia Infante, J.C. Real-Time Fuzzy Digital Filtering. Comput. Sist. 2008, 11, 390–401. [Google Scholar]
- Vázquez, B.; Garcia, I.; Sánchez, G.C. Description of adaptive fuzzy filtering using the DSP TMS320C6713. Proceedings of 2009 52nd IEEE International Midwest Symposium on Circuits and Systems, Cancun, Mexico, 2–5 August 2009; pp. 1086–1090. [Google Scholar]
- Antonini, M.; De Luise, A.; Ruggieri, M.; Teotino, D. Satellite Data Collection and Forwarding systems. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 25–29. [Google Scholar] [CrossRef]
- Karasawa, Y. On physical limit of wireless digital transmission from radio wave propagation perspective. Radio Sci. 2016, 51, 1600–1612. [Google Scholar] [CrossRef]
- Casilari, E. Caracterización y Modelado de tráfico de Video VBR. Ph.D. Thesis, Universidad de Málaga, Málaga, Spain, 1998; pp. 1–406. [Google Scholar]
- Luque, J. Modelado del Retardo de Transmisión en Bluetooth 2.0+EDR. Ph.D. Thesis, Universidad de Málaga, Málaga, Spain, 2010; pp. 1–370. [Google Scholar]
- Rincon, D. Introducción a los modelos de tráfico para redes de banda ancha. Ramas Estud. IEEE 1998, 11, 41–48. [Google Scholar]
- Valdez Martínez, J.S.; Villanueva Tavira, J.; Beltrán Escobar, M.A.; Contreras Calderon, E.; Alcalá Barojas, I.; López Vega, L.J. Analysis of the communication time of embedded systems applied to telecontrol systems. In Proceedings of the 2019 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), Cuernavaca, Mexico, 26–29 November 2019; pp. 152–158. [Google Scholar]
- Haykin, S. Adaptive Filter Theory, 2nd ed.; Prentice Hall: Hoboken, NJ, USA, 1991; pp. 210–215. [Google Scholar]
- Nagurney, A. Mathematical Models of Transport and Networks. In Matematical Models in Economics, V II; EOLSS Publications: Abu Dhabi, United Arab Emirates, 2010; pp. 346–384. [Google Scholar]
- Valdez Martínez, J.S.; Delgado Reyes, G.; Guevara Lopez, P.; Cano Rosas, J.L. Transmission Times Reconstruction in a Telecontrolled Real-Time System. IEEE Lat. Am. Trans. 2019, 17, 349–357. [Google Scholar] [CrossRef]
- Gustafsson, F. Adaptive Filtering and Change Detection, 2nd ed.; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2000; pp. 263–327. [Google Scholar]
- Delgado Reyes, G.; Guevara Lopez, P.; De la Barrera, A.; Hernández, C.A. Uso del Filtro de Kalman para la Reconstruccion Adaptativa del Vector de Tiempos de Ejecución en la Simulación en Tiempo Real de un Motor de C. C. In Proceedings of the XI Congreso Internacional Sobre Innovación y Desarrollo Tecnológico CIINDET 2014, Cuernavaca, México, 2–4 April 2014. [Google Scholar]
- Real-Time Operating System QNX Web Page. Available online: http://www.qnx.com/developers/docs/ (accessed on 22 November 2021).
- Institute of Electrical and Electronics Engineers. Portable Operating System Interface (POSIX)-Part 1: System Application Program Interface (API) [C Language]; Institute of Electrical and Electronics Engineers: Manhattan, NY, USA, 1995. [Google Scholar]
- González-Baldovinos, D.L.; Guevara-López, P.; Cano-Rosas, J.L.; Valdez-Martínez, J.S.; López-Chau, A. Response Times Reconstructor Based on Mathematical Expectation Quotient for a High Priority Task over RT-Linux. Mathematics 2022, 10, 134. [Google Scholar] [CrossRef]
- National Instruments: Labview 2016 Web Page. Available online: https://www.ni.com/es-mx/shop/labview.html (accessed on 22 November 2021).
- MATLAB Web Page. Available online: http://www.matlab.com/ (accessed on 22 November 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 9.59 × 10−12 | 19.19 × 10−12 | 3.925 × 10−12 |
| 4.762 × 10−16 | 28.57 × 10−16 | 9.26 × 10−16 |
| 4.762 × 10−16 | 28.33 × 10−16 | 9.293 × 10−16 |
| 195.2 × 10−6 | 53.91 × 10−6 | 16.86 × 10−6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valdez-Martínez, J.S.; Guevara-López, P.; Delgado-Reyes, G.; González-Baldovinos, D.L.; Cano-Rosas, J.L.; Calixto-Rodriguez, M.; Villanueva-Tavira, J.; Buenabad-Arias, H.M. Communication Times Reconstruction in a Telecontrolled Client–Server Scheme: An Approach by Kalman Filter Applied to a Proprietary Real-Time Operating System and TCP/IP Protocol. Mathematics 2022, 10, 3885. https://doi.org/10.3390/math10203885
Valdez-Martínez JS, Guevara-López P, Delgado-Reyes G, González-Baldovinos DL, Cano-Rosas JL, Calixto-Rodriguez M, Villanueva-Tavira J, Buenabad-Arias HM. Communication Times Reconstruction in a Telecontrolled Client–Server Scheme: An Approach by Kalman Filter Applied to a Proprietary Real-Time Operating System and TCP/IP Protocol. Mathematics. 2022; 10(20):3885. https://doi.org/10.3390/math10203885
Chicago/Turabian StyleValdez-Martínez, Jorge Salvador, Pedro Guevara-López, Gustavo Delgado-Reyes, Diana Lizet González-Baldovinos, Jose Luis Cano-Rosas, Manuela Calixto-Rodriguez, Jonathan Villanueva-Tavira, and Hector Miguel Buenabad-Arias. 2022. "Communication Times Reconstruction in a Telecontrolled Client–Server Scheme: An Approach by Kalman Filter Applied to a Proprietary Real-Time Operating System and TCP/IP Protocol" Mathematics 10, no. 20: 3885. https://doi.org/10.3390/math10203885
APA StyleValdez-Martínez, J. S., Guevara-López, P., Delgado-Reyes, G., González-Baldovinos, D. L., Cano-Rosas, J. L., Calixto-Rodriguez, M., Villanueva-Tavira, J., & Buenabad-Arias, H. M. (2022). Communication Times Reconstruction in a Telecontrolled Client–Server Scheme: An Approach by Kalman Filter Applied to a Proprietary Real-Time Operating System and TCP/IP Protocol. Mathematics, 10(20), 3885. https://doi.org/10.3390/math10203885