1. Introduction
Integral equations are an important part of applied mathematics, as they have various applications in physics, engineering, biology, hydrodynamics, thermodynamics, etc. They also provide mathematical models for the progress of an epidemic and many other physical and biological problems (see [
1]).
They have been studied extensively, both theoretically (existence, uniqueness, stability, data dependence of the solution) and numerically. Numerical solutions have been found using Adomian decomposition [
2], Nyström methods [
3,
4], collocation [
5,
6,
7], block-pulse functions [
8], Gaussian quadratures [
9], iterative methods [
10,
11], etc. To approximate solutions, a wide variety of functions have been employed, such as wavelets [
12,
13,
14], Taylor series expansions [
15], quasi-interpolating projectors [
16], Bernoulli polynomials [
17], and others. In this paper, we investigate a collocation method based on piecewise linear interpolation over triangles.
A mixed Volterra–Fredholm integral equation (MVFIE) is an integral equation of the type
where
is a closed bounded subset of
Such equations arise in integral reformulations of various initial and boundary value problems for partial differential equations in heat and fluid flow, elasticity, thermodynamics, and many more. The above equation is of the Hammerstein type (MVFHIE), if the kernel can be factored as
In this study we consider the case
so equations of the form
We simplify the writing denoting by
and by
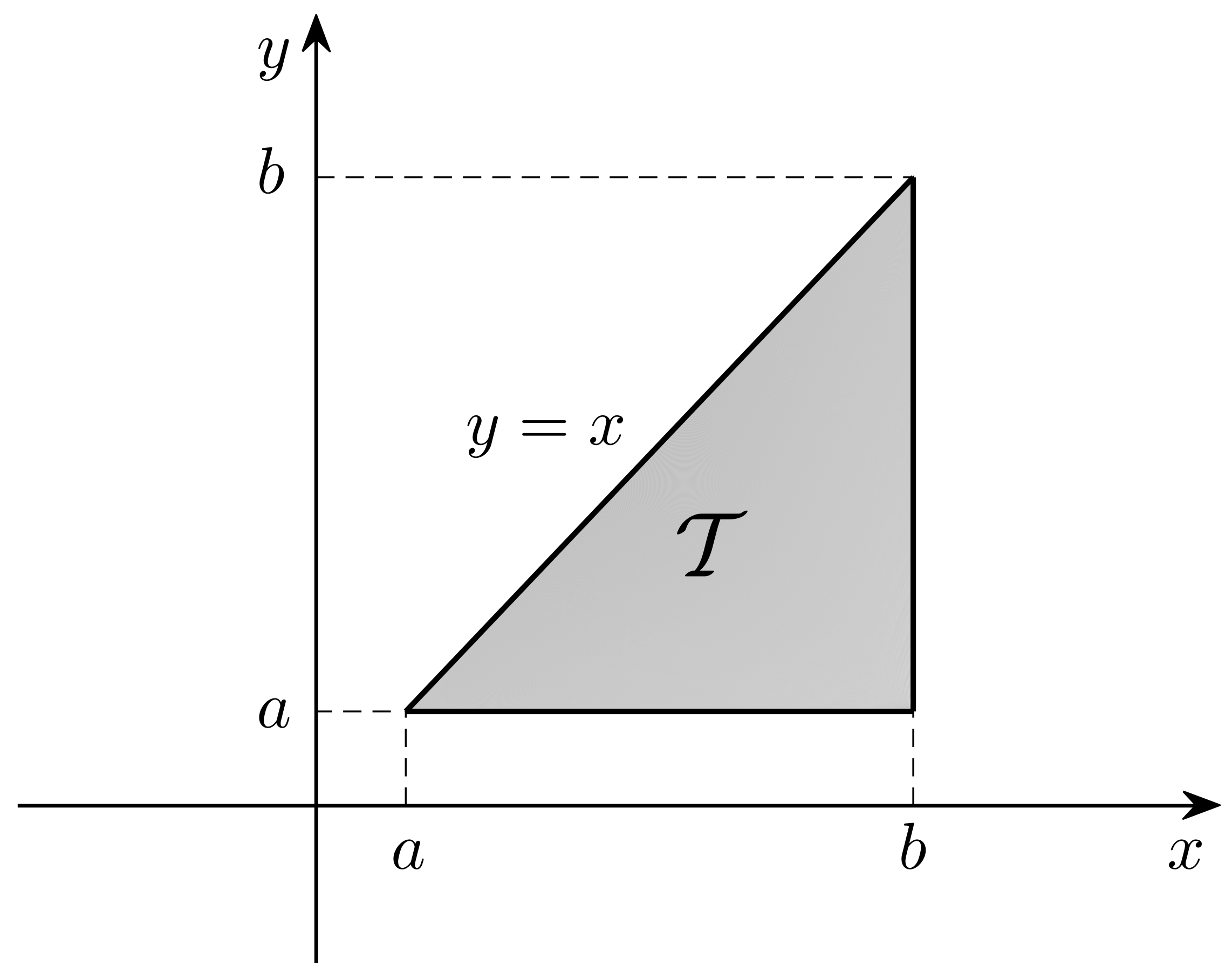
. Now, the MVFHIE can be written as
where
denotes the triangle
seen in
Figure 1.
The rest of the paper is organized as follows: in
Section 2, we recall some preliminaries on collocation and discuss the reformulation of the problem. In
Section 3, we present the numerical method. We start with a special type of linear interpolation over triangles (first on the unit simplex, then on any planar triangle), which produces a higher precision numerical integration scheme; this is used to construct the collocation method. We prove the convergence and give error estimates, showing superconvergence at the collocation nodes.
Section 4 contains several numerical examples, illustrating the applicability of the method and confirming the theoretical findings. In
Section 5, we give some concluding remarks on the advantages of the proposed procedure and discuss ideas for future research in this area.
2. Preliminaries
We briefly recall the standard collocation method, in the framework of projection methods. Following the idea in [
18], we reformulate the problem. Let
Then,
u and
v must satisfy
and
We use collocation for the new function
v. We seek to approximate
v by
where
are basis functions and find the unknown coefficients
by forcing Equation (
1) to be true at the collocation points, so from the system
or, equivalently,
for
.
Let us remark that the integrals in (
4) have to be evaluated only once per iteration, while, if collocation had been performed on the original variable
u, the integrals in the corresponding system would need to be computed at every step of the iteration. This makes the collocation method for the new unknown much more efficient.
We assume that the functions , and f satisfy the following hypotheses:
- H1.
Equation (
1)
has an isolated solution with non-zero index, assumed to be smooth enough;
- H2.
Function ;
- H3.
The integral operator defined byis completely continuous; - H4.
The derivative exists and is continuous on .
Let
be the interpolatory projection operator defined by
Then
is a bounded linear operator with norm
Making
satisfy Equation (
3), the values
are found from the nonlinear system
for each
Then, the approximate solution of (
1) is given by
The following convergence result holds (see [
18], Theorem 2):
Theorem 1. Assume that functions , and g satisfy hypotheses(H1)–(H4)
. In addition, assume the operator defined in (
5)
satisfies condition (
6)
. If is the solution of (
3)
corresponding to (via (
2)),
then Moreover, there exists an and a constant c, independent of n, such thatfor all . Hence, both approximations converge and converges to at least as fast as converges to .
3. A Piecewise Linear Collocation Method
3.1. Interpolation-Based Collocation
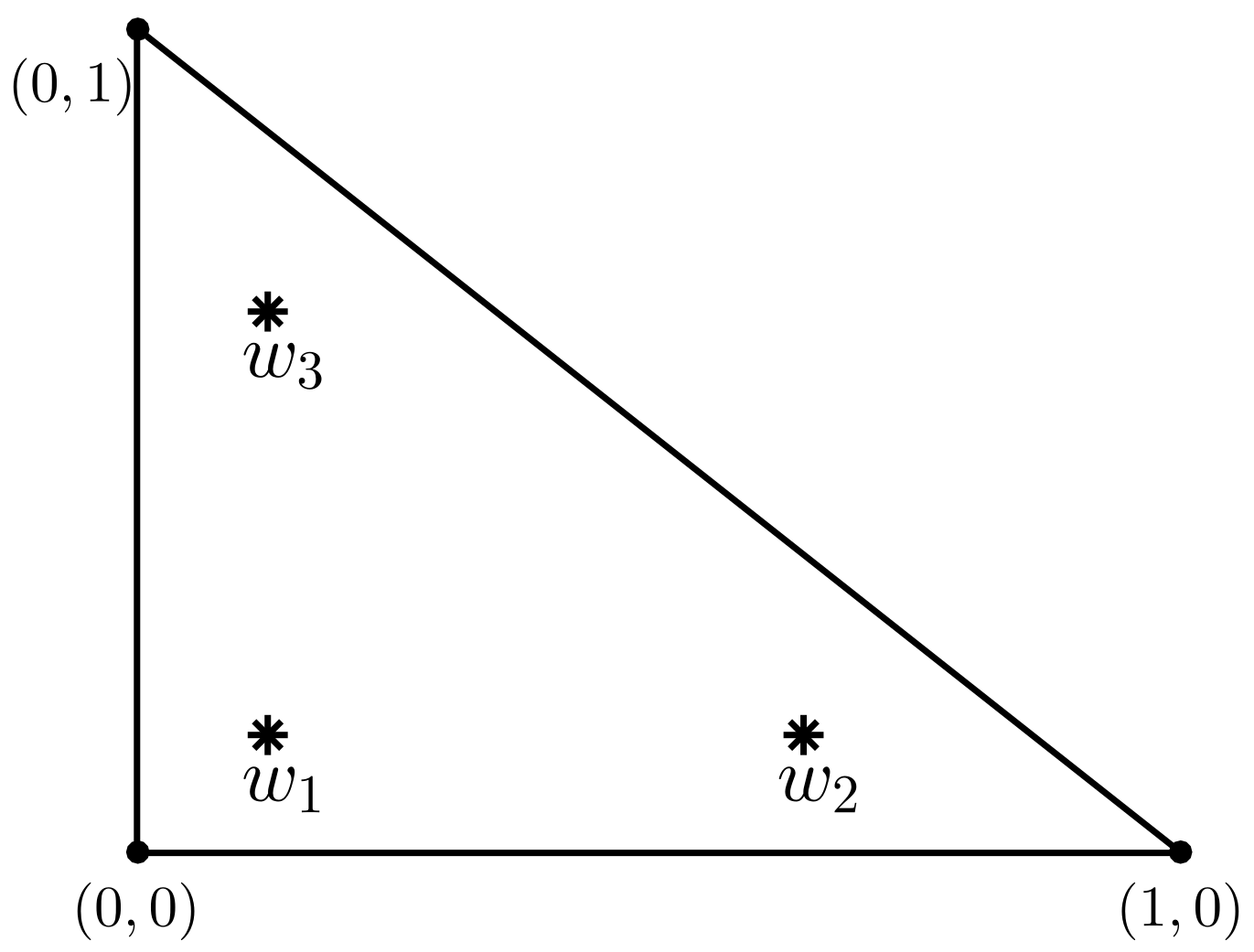
We start with interpolation on the unit simplex
where
are the
barycentric coordinates of a point. Then, using an affine transformation, we can generalize the ideas to any triangle in
.
We approximate a function
by linear interpolation (see [
6,
19]):
where the nodes
are symmetrically placed inside
(see
Figure 2) and the basis functions are given by
Obviously, the interpolation formula (
7) has degree of precision 1. Integrating it over
, we obtain the numerical integration formula
which has degree of precision 2, higher than expected, when linear interpolants are used. This will be important in the convergence analysis of the collocation method.
Next, we extend these formulas from
to any planar triangle
with vertices
. We define the affine mapping
by
where
are the vertices of
. Then
m maps a polynomial over
into a polynomial of the same degree over
and its inverse acts the same way. With the use of this affine mapping we can define interpolation over any triangle
.
Let
. Just as in (
7), we approximate it by the interpolation polynomial
Integrating, we obtain the approximating formula
where
is the Jacobian of the transformation defined in (
11). Again, formula (
13) is exact for all polynomials of degree 2.
We now define a collocation method based on the piecewise linear interpolation defined above.
Consider
, a triangulation of
. For each
, denote by
the vertices of
and, as in (
11), define the affine mapping
by
For any given
, we define
by
For the approximation
we know from interpolation theory, that the following error estimate holds:
Theorem 2 ([
20], p. 165)
. Let Δ be a planar triangle and consider . Then,where and . The constant c is independent of both h and Δ. From the interpolation formula (
14) we obtain, by integration, the quadrature formula
where
with
given in (
8) and
,
defined in (
9).
For the integral Equation (
3), we want solutions of the form
for
. We choose the collocation nodes to coincide with the interpolation nodes and find the values
so that Equation (
3) is true at the collocation nodes. We obtain the nonlinear system
for all
. Once the unknowns
are determined, we find the approximate solutions of
u and
v by
for each
.
3.2. Convergence and Error Analysis
To analyze the convergence of the collocation method, denote by
the operator
Then, Equation (
3) can be rewritten in operator form as
while the collocation Equation (
15) is now
By simple computation, we obtain
The following result follows from standard projection theory, using Theorem 2 and relation (
17) (see e.g., [
20],
Section 3.1).
Theorem 3. Under the assumptions (H1)–(H4)
, for all sufficiently large n, the operators are invertible on and have uniformly bounded inverses. Moreover, if is the true solution of (
3)
and is the approximate solution from (
15),
we havefor all sufficiently large n andwith the grid size of the triangulation . Thus, the method is convergent with a rate of convergence of , in general.
However, at the collocation nodes, the method is superconvergent, converging faster than throughout the entire domain. This is our main result.
Theorem 4. - (a)
Let Δ be a planar triangle and consider functions , . Thenwhere . - (b)
Assume the hypotheses of Theorem 3 hold and that , . Then
Proof. - (a)
In what follows, c denotes a generic constant.
Since
, there exist Taylor polynomials
and
of degree 1 and 2, respectively, of the function
h (about some suitable point in
), such that
and
where the constants depend on the derivatives of
h.
In addition, since
, we can find a constant
satisfying
Recall that the interpolation formula (
7) (and, hence, (
12)) is exact for all polynomials of degree 1, which means
, for every
. So, we can write
Integrating over
, we obtain
because
since the numerical integration formula (
13) has degree of precision 2. We bound the errors using (
20)–(
22), to obtain (
18).
- (b)
By relation (
17), at the collocation nodes we have.
so we will find bounds for
. For each
, we have
On each triangle
, we use part a) for
and
. Then, we obtain
Since there are
triangles and for each triangle
, we have a composite error of
Thus, by Theorem 1, we have (
19). □
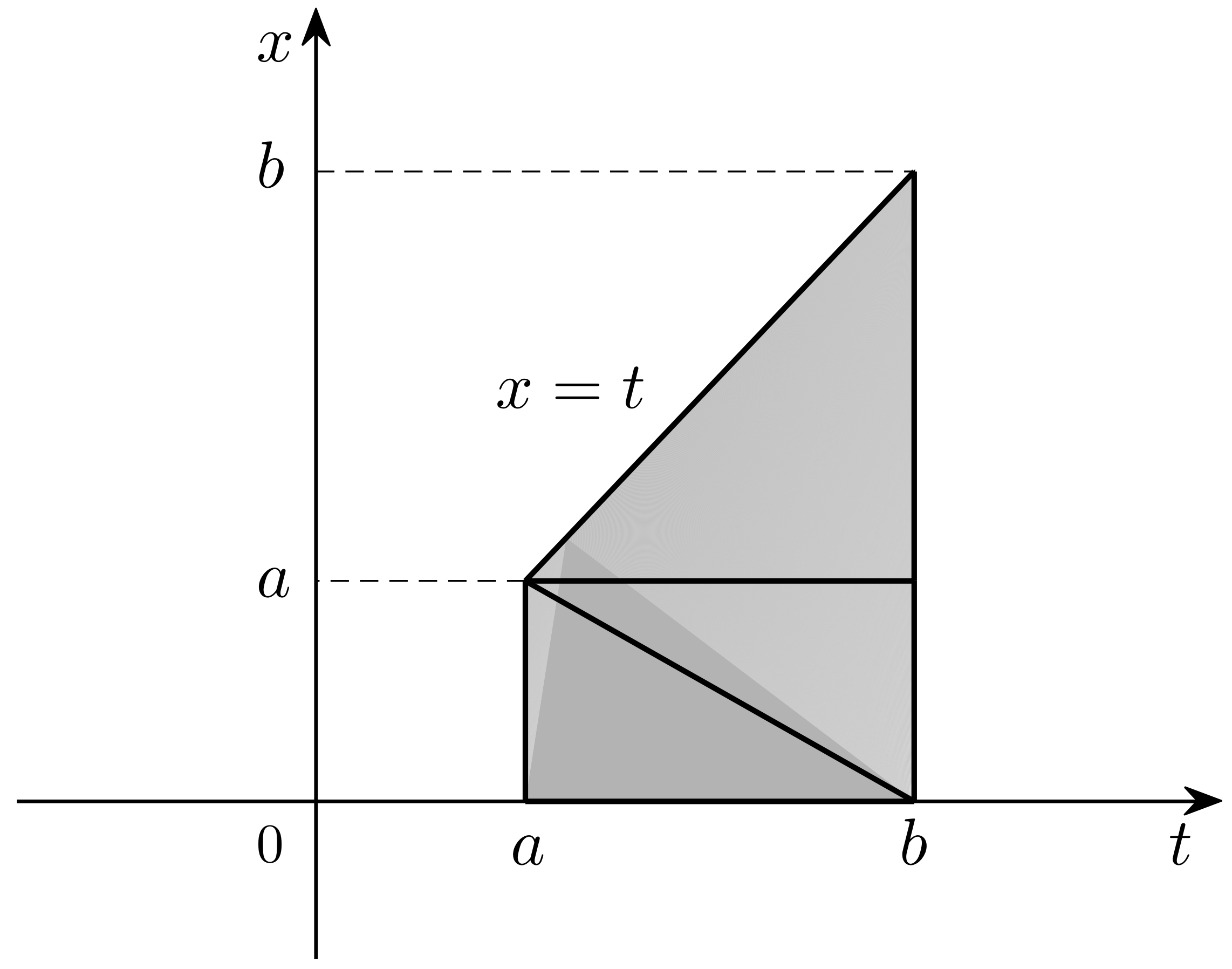
Remark 1. Let us note that, sometimes, in applications, we encounter MVFHIE’s of the formwhere the lower limits of the integrals do not coincide. Such equations come up particularly as integral reformulations of boundary or initial value problems for partial differential equations. In this case, we consider the region of integrationand start with three triangles that cover it, as seen in Figure 3. From here on, everything works the same as described above for the region . 4. Numerical Experiments
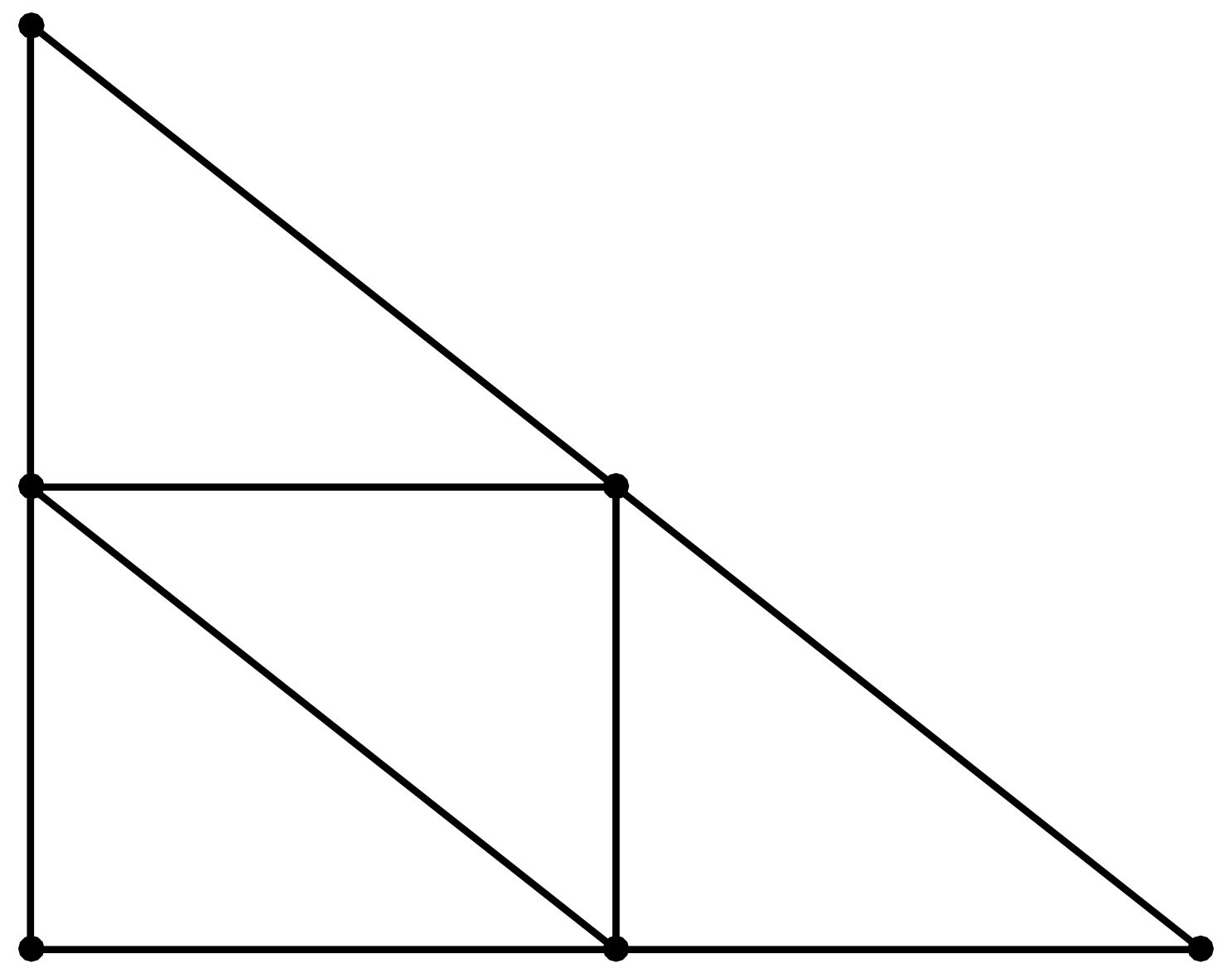
We apply the collocation method described above to several numerical examples. First, let us discuss the triangulation of
and the way it is refined at each step. Let
be a triangulation of
with mesh size
At every iteration, every triangle
will be refined into smaller triangles by connecting the midpoints of the three sides of
(see
Figure 4). This way, the new triangulations
will have four times as many triangles as
and grid size
For such triangulations, if the approximation formula has degree of precision
r and
denotes the error, then
We use this to assess the rate of convergence in our examples.
For each example, we look at the errors at the collocation points
as well as at the values of the ratios
Example 1. Consider the nonlinear integral equationwhere . The exact solution of this equation is We start with
triangle,
itself. The errors in
v and
u are given in
Table 1. Notice that
and
both converge to the value 3, consistent with the conclusions of Theorem 4. In addition, the table contains the CPU times (in seconds) for each iteration.
Example 2. Next, we consider the integral equation [17]where and . The true solution of Equation (25) is In this example, we take
and the function
given above. Again we start with one triangle,
. The numerical approximations, the errors and the CPU times are given in
Table 2. Again, they are in good agreement with the theoretical results of Theorem 4. In addition, one can notice that the accuracy of the present method is higher than the one in [
17], where collocation at Gauss–Bernoulli nodes was used.
Example 3. As an example of the type (
23),
described in Remark 1, consider the equationwhere the domain of integration is and whose exact solution is Now we start with three triangles covering
R, as in
Figure 3. The results are displayed in
Table 3 and again, they confirm the theoretical findings of Theorem 4.
Remark 2. The method was implemented in Matlab 2016. The integrals in System (
15)
were evaluated with the integral2 function, which uses tiled adaptive quadratures. The system was solved with the fsolve function, using large-scale (trust-region, trust-region-dogleg, and Levenberg–Marquardt) optimization algorithms. 5. Conclusions and Future Work Ideas
We studied a collocation method for approximating the solutions of two-dimensional MVFHIE’s. As in [
18], the collocation method is applied to a reformulation of the equation in a new unknown. This makes for a more efficient method from the implementation point of view, reducing the computational cost, as the integrals needed in the coefficients of the resulting system only have to be evaluated once per iteration. The collocation method described here is based on a special type of linear interpolation on triangles, which leads to a superconvergent method at the collocation nodes. Another aspect worth pointing out is the fact that since our collocation method is based on interpolation, a rigorous convergence analysis is easier than for methods based directly on quadratures. Compared to other interpolation-based collocation methods, since the degree of precision of the numerical integration formula is higher, this method converges faster, without having to increase the degree of the interpolants, which, in turn, would increase the size of the nonlinear system of the coefficients. It can be seen from the numerical examples that the CPU times are relatively small, but the precision of the approximate solution is quite good. These are the major advantages of this numerical method.
The choice of interpolation nodes was important. They were chosen so that the corresponding quadrature formula has a higher precision than expected with linear interpolants. In addition, the fact that they are symmetrical simplifies the implementation of the method. Last but not least, as the interpolation/collocation nodes are all interior to the triangles, such methods could work well for some singular kernels, especially if the singularities occur on the boundary of the domain. For instance, integral reformulations of the heat equation with initial or boundary values would lead to such integral equations.
Further, more complicated regions of integration can be considered, with the upper limit of integration some function
,
Such equations could be handled the same way, if is smooth enough and a suitable triangulation can be considered on the curved boundary.
The case of an infinite domain could also be studied, to see if an adapted collocation method of this type would work, with convenient triangulations and, perhaps, some extra theoretical assumptions on the kernel.
Last but not least, other interpolation/collocation nodes on triangles can be considered.




{kind=link}
{kind=link}
{kind=link}
{kind=link}