
Neural Network-Based Approximation Model for Perturbed Orbit Rendezvous

Abstract
:1. Introduction
2. Problem Description of Orbit Rendezvous
3. Methodology
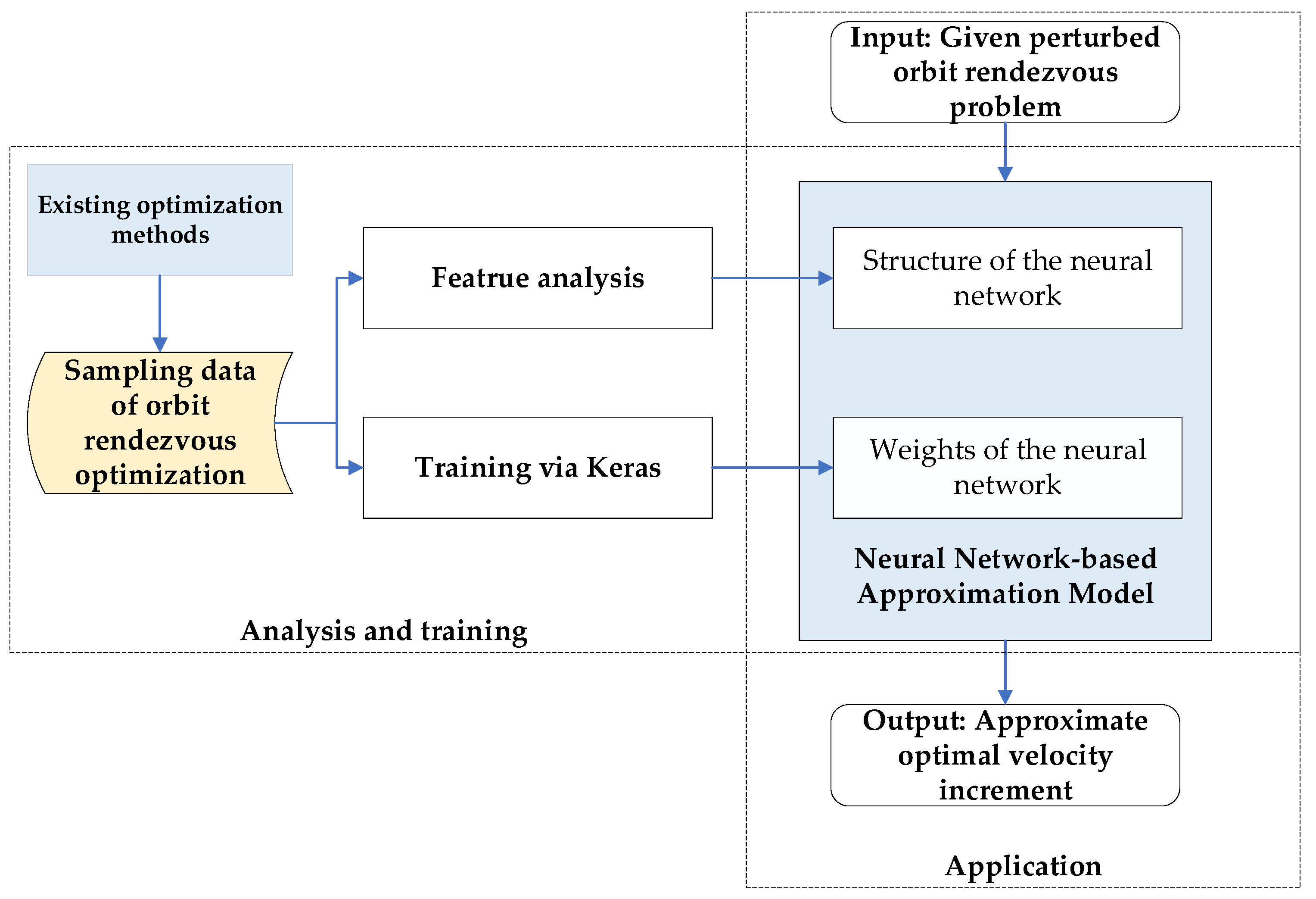
3.1. Approximation Method of the Perturbed Orbit Rendezvous Problem
3.2. Features Analysis of the Perturbed Orbit Rendezvous Problem
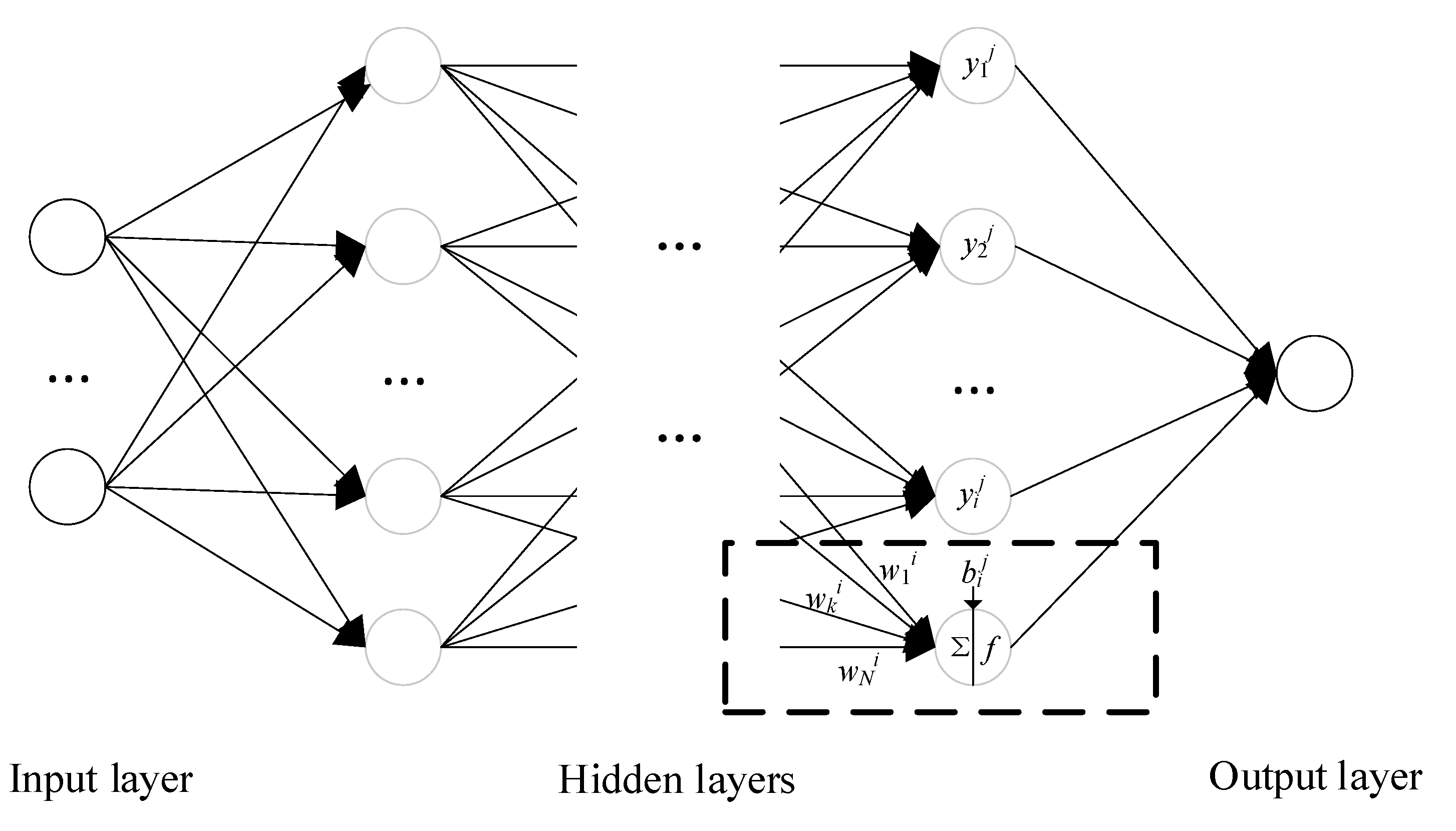
3.3. Neural Network and Training
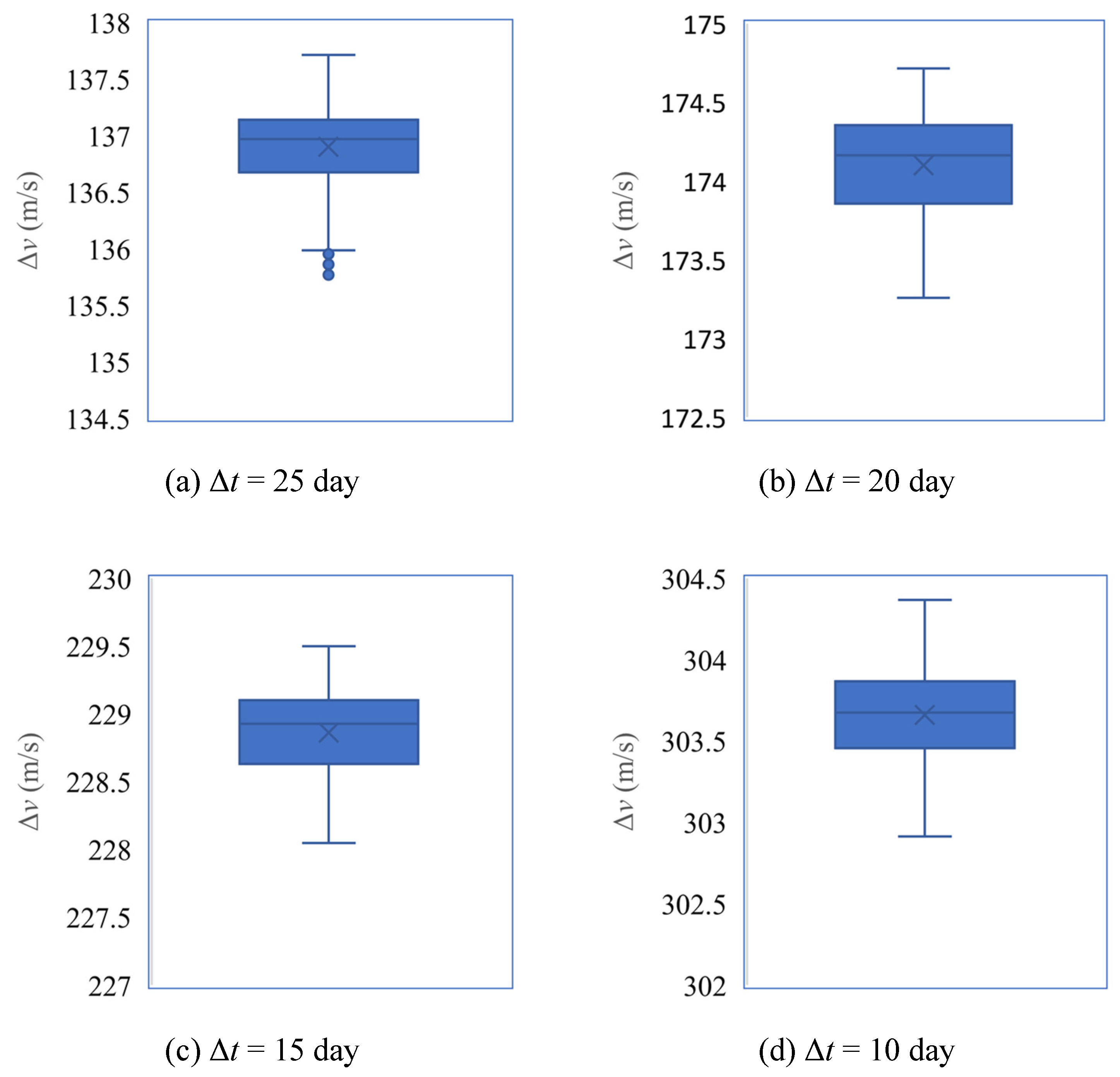
4. Experiments
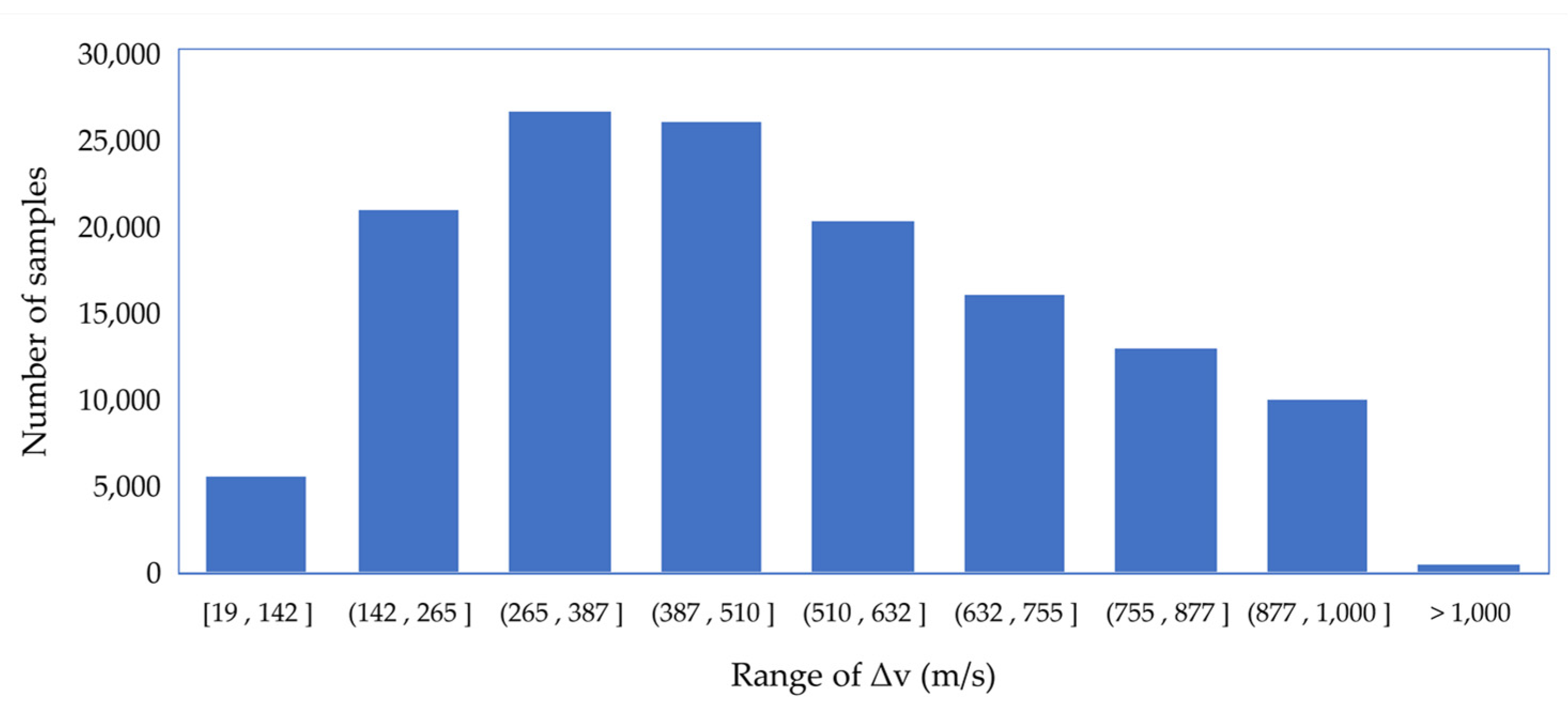
4.1. Dataset Generalization and Training Result
4.2. Application in Global Optimization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| a0 | Semi-major axis of initial orbit |
| i0 | Inclination of initial orbit |
| Δa0 | Difference of semi-major axis between initial and target orbits |
| Δi0 | Difference of inclination axis between initial and target orbits |
| ΔΩ0 | Difference of RAAN axis between initial and target orbits |
| Δu0 | Difference of phase axis between initial and target orbits |
| Δex0 | Difference of e cosω between initial and target orbits |
| Δey0 | Difference of e sinω between initial and target orbits |
| Initial drift rate of RAAN | |
| Upper limit of eccentricity | |
| Upper limit of change in semi-major axis | |
| Upper limit of change in inclination | |
| Upper limit of change in RAAN | |
| Upper limit of flight time | |
| Mean value of semi-major axis | |
| Mean value of inclination | |
| Δv | Velocity increment of orbit rendezvous |
| OTV | Orbit transfer vehicle |
| Launch mass of OTV | |
| Dry mass of OTV | |
| Mass of de-orbit package released at each debris point |
References
- Li, S.; Huang, X.; Yang, B. Review of Optimization Methodologies in Global and China Trajectory Optimization Competitions. Prog. Aerosp. Sci. 2018, 102, 60–75. [Google Scholar] [CrossRef]
- Vallado, D.A. Fundamentals of Astrodynamics and Applications, 2nd ed.; Microscosm Press: Torrance, CA, USA, 2001; pp. 757–800. [Google Scholar]
- Casalino, L.; Dario, P. Active Debris Removal Missions with Multiple Targets. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, San Diego, CA, USA, 4–7 August 2014. [Google Scholar]
- Yang, Z.; Luo, Y.Z.; Zhang, J. Two-Level Optimization Approach for Mars Orbital Long-Duration, Large Non-Coplanar Rendezvous Phasing Maneuvers. Adv. Space Res. 2013, 52, 883–894. [Google Scholar] [CrossRef]
- Zhang, T.J.; Shen, H.; Yang, Y. Ant Colony Optimization-Based Design of Multiple-Target Active Debris Removal Mission. Trans. Jpn. Soc. Aeronaut. Space Sci. 2018, 61, 201. [Google Scholar] [CrossRef] [Green Version]
- Barea, A.; Urrutxua, H.; Cadarso, L. Large-Scale Object Selection and Trajectory Planning for Multi-Target Space Debris Removal Missions. Acta Astronaut. 2020, 170, 289–301. [Google Scholar] [CrossRef]
- Cerf, M. Multiple Space Debris Collecting Mission: Optimal Mission Planning. J. Optim. Theory Appl. 2015, 167, 195–218. [Google Scholar] [CrossRef] [Green Version]
- Huang, A.Y.; Luo, Y.Z.; Li, H.N. Fast Estimation of Perturbed Impulsive Rendezvous via Semi-Analytical Equality-Constrained Optimization. J. Guid. Control Dyn. 2020, 43, 2383–2390. [Google Scholar] [CrossRef]
- Huang, A.Y.; Luo, Y.Z.; Li, H.N. Fast Optimization of Impulsive Perturbed Orbit Rendezvous Using Simplified Parametric Model. Astrodynamics 2021, 5, 391–402. [Google Scholar] [CrossRef]
- Chen, S.Y.; Baoyin, H.X. Analytical Estimation of the Velocity Increment in J2-Perturbed Impulsive Transfers. J. Guid. Control Dyn. 2022, 45, 310–319. [Google Scholar] [CrossRef]
- Shen, H.X.; Casalino, L. Simple ΔV Approximation for Optimization of Debris-to-Debris Transfers. J. Spacecr. Rocket. 2021, 58, 575–580. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [Green Version]
- Izzo, D.; Märtens, M.; Pan, X. A survey on artificial intelligence trends in spacecraft guidance dynamics and control. Astrodynamics 2019, 4, 287–299. [Google Scholar] [CrossRef]
- Diao, Y.; Pu, J.; Xu, H.; Mu, R. Orbit-Injection Strategy and Trajectory-Planning Method of the Launch Vehicle under Power Failure Conditions. Aerospace 2022, 9, 199. [Google Scholar] [CrossRef]
- Li, H.; Chen, S.; Izzo, D. Deep networks as approximators of optimal low-thrust and multi-impulse cost in multitarget missions. Acta Astronaut. 2020, 166, 469–481. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Luo, Y.Z. Fast Evaluation of Low-Thrust Transfers via Multilayer Perceptions. J. Guid. Control Dyn. 2019, 42, 2627–2637. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Luo, Y.Z. Fast Approximation of Optimal Perturbed Long-Duration Impulsive Transfers via Artificial Neural Networks. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 123–1138. [Google Scholar] [CrossRef]
- More, J.J.; Garbow, B.S.; Hillstrom, K.E. User Guide for MinPack-1; Report No. ANL-80-74; Argonne National Lab.: Lemont, IL, USA, 1980. [Google Scholar]
- Izzo, D.; Martens, M. The Kessler Run: On the Design of the GTOC9 Challenge. Acta Futura 2018, 11, 11–24. [Google Scholar]
- Petropoulos, A.; Grebow, D.; Jones, D. GTOC9: Methods and Results from the Jet Propulsion Laboratory Team. Acta Futura 2018, 11, 25–35. [Google Scholar]
- Huang, A.Y.; Luo, Y.Z.; Li, H.N. Global Optimization of Multiple-Spacecraft Debris Removal Mission via Problem Decomposition and Dynamics-Guide Evolution Approach. J. Guid. Control Dyn. 2022, 45, 171–178. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Hidden Layers | Number of Nodes in Each Hidden Layer | MRE (%) | MAE (m/s) | Time of Each Training Epoch (s) | Training Time (s) | Time of Δv Evaluation (s) |
|---|---|---|---|---|---|---|
| 2 | 30 | 1.34 | 5.3 | 4.6 | 1380 | 1.2 × 10−6 |
| 2 | 60 | 0.96 | 3.8 | 5.0 | 1500 | 4.8 × 10−6 |
| 2 | 90 | 0.89 | 3.7 | 5.2 | 1560 | 1.1 × 10−5 |
| 3 | 60 | 0.81 | 3.3 | 6.0 | 1800 | 8.9 × 10−6 |
| 4 | 60 | 0.79 | 3.2 | 7.0 | 2100 | 1.3 × 10−5 |
| Model of Velocity Increment | Optimal Order of Debris | Total Δv (m/s) | J (MEUR) | Computational Time (s) |
|---|---|---|---|---|
| Method in [20] | 72, 107, 61, 10, 28, 3, 64, 66, 31, 90, 73, 87, 57, 35, 69, 65, 8, 43, 71, 4, 29 | 3409.5 | 97.1 | >3600 |
| Method in [21] | 72, 107, 61, 73, 3, 69, 64, 66, 31, 10, 90, 87, 57, 35, 28, 65, 8, 43, 71, 4, 29 | 3357.0 | 95.6 | 600 |
| Neural network model in this paper | 72, 61, 107, 73, 3, 69, 64, 66, 31, 10, 90, 87, 57, 35, 28, 65, 8, 43, 71, 4, 29 | 3407.5 | 97.1 | 120 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, A.; Wu, S. Neural Network-Based Approximation Model for Perturbed Orbit Rendezvous. Mathematics 2022, 10, 2489. https://doi.org/10.3390/math10142489
Huang A, Wu S. Neural Network-Based Approximation Model for Perturbed Orbit Rendezvous. Mathematics. 2022; 10(14):2489. https://doi.org/10.3390/math10142489
Chicago/Turabian StyleHuang, Anyi, and Shenggang Wu. 2022. "Neural Network-Based Approximation Model for Perturbed Orbit Rendezvous" Mathematics 10, no. 14: 2489. https://doi.org/10.3390/math10142489
APA StyleHuang, A., & Wu, S. (2022). Neural Network-Based Approximation Model for Perturbed Orbit Rendezvous. Mathematics, 10(14), 2489. https://doi.org/10.3390/math10142489