
A Stochastic Optimization Algorithm to Enhance Controllers of Photovoltaic Systems


 ,
,  and
and 
Abstract
:1. Introduction
- (i)
- The FBL, used as a main control technique, is implemented to enable high local performance.
- (ii)
- The SMC technique is then combined with the FBL to attenuate the effects of random and matched disturbances. This combination is expected to improve the dynamic performance of the controlled system.
- (iii)
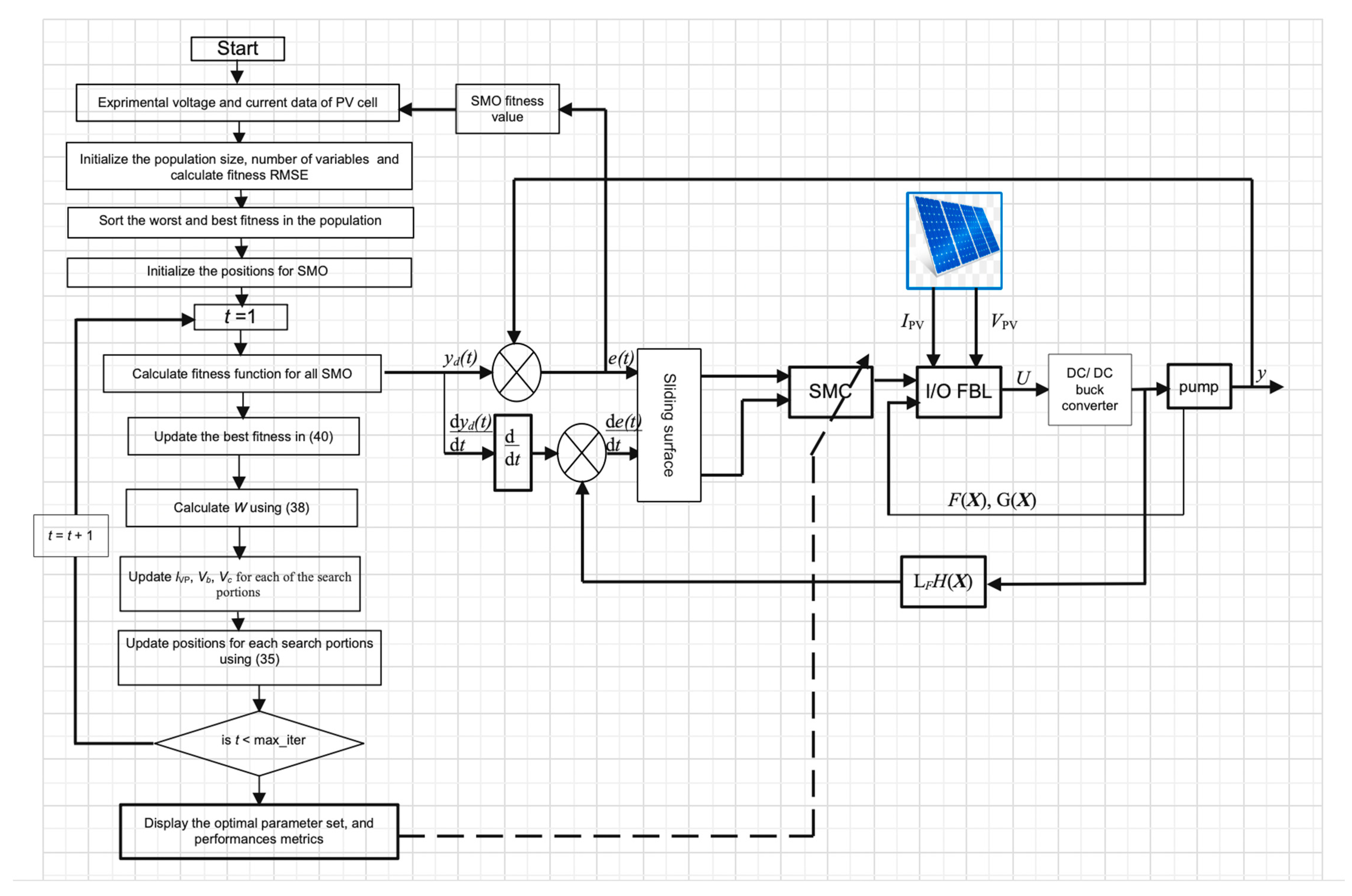
- Due to the uncertainties in the model, it is impossible to fully eliminate the disturbances utilizing only the conventional SMC. To overcome this problem, a method associated with an SMO technique is implemented to allow fine-tuning of the controller gains ensuring the efficiency of the PV system as a stand-alone power generator in a remote area.
2. Background and Problem Formulation
2.1. Robust Nonlinear Control Strategy
- (i)
- for allaroundand for all;
- (ii)
- ,
- (i)
- When , the impact of the disturbance is not as straightforward as the control input, with being given in (4). The entire information from the disturbance is accessible through the system states, and as such, the decoupling of from the disturbance is rendered unnecessary.
- (ii)
- When , the disturbance and control input have a similar influence on the system output, and feedforward performance is essential to perform decoupling.
- (iii)
- When , the disturbance influences the output more straightforwardly than the control output. Some form of predictive activity is required to perform disturbance rejection.
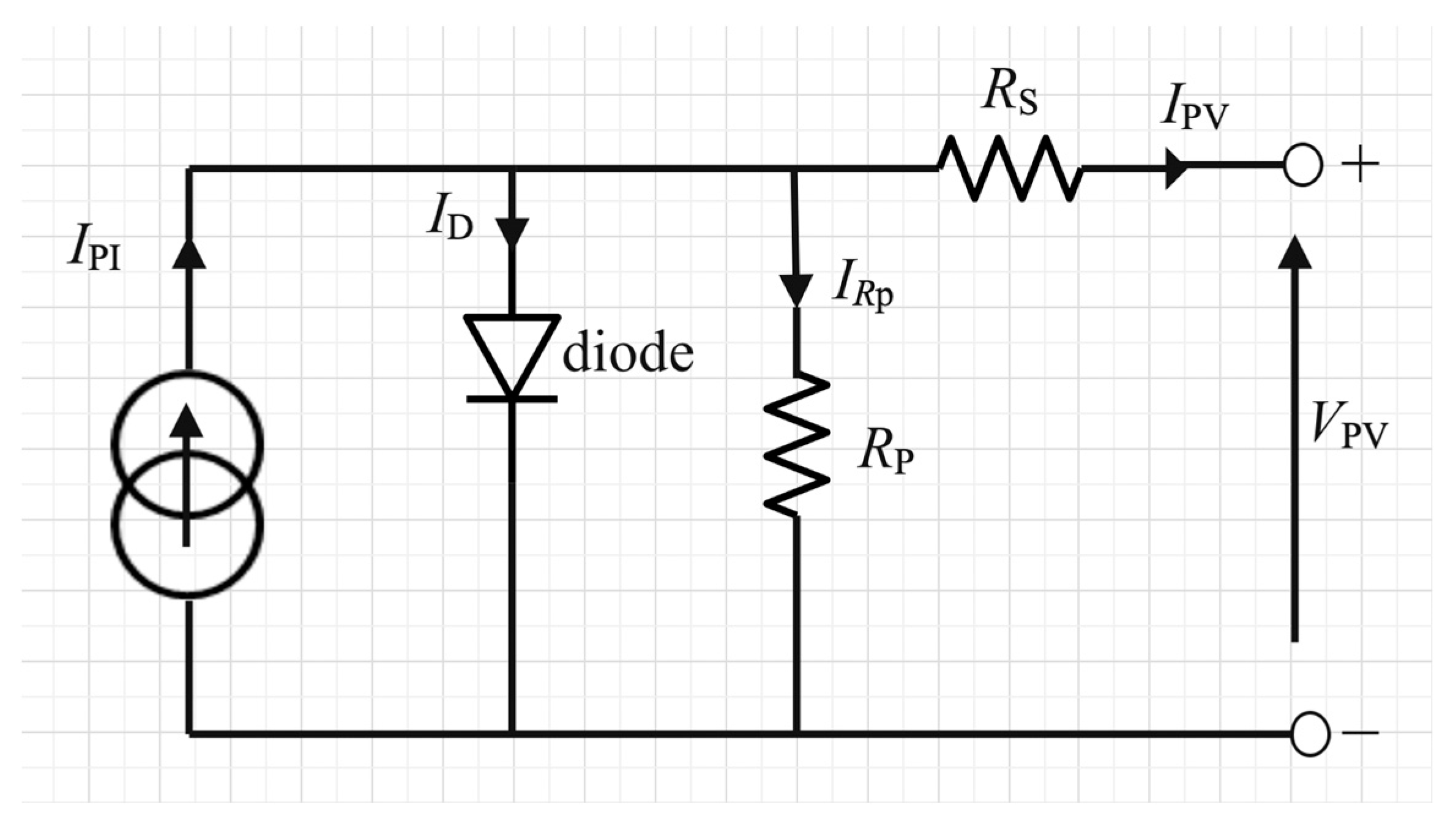
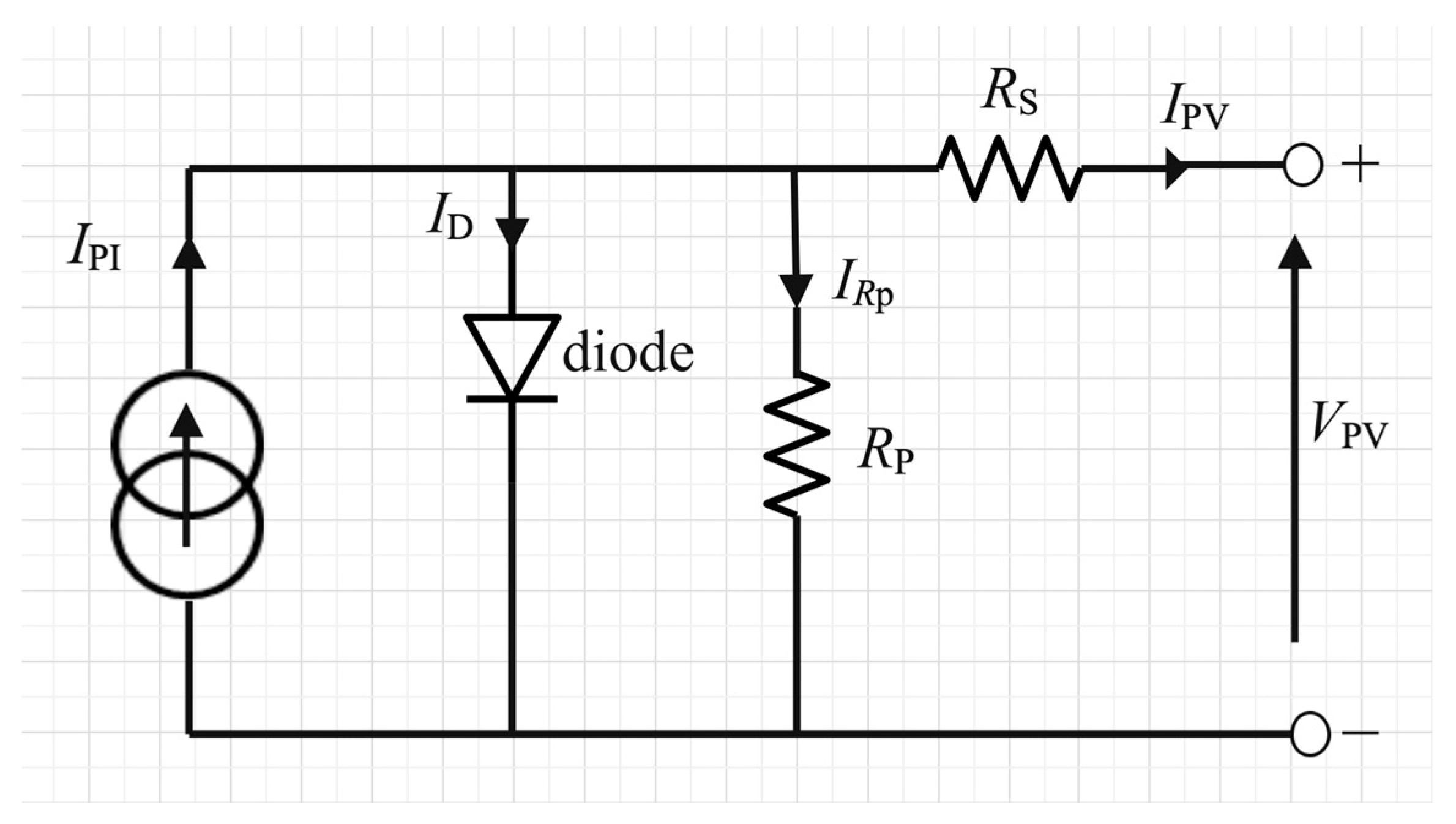
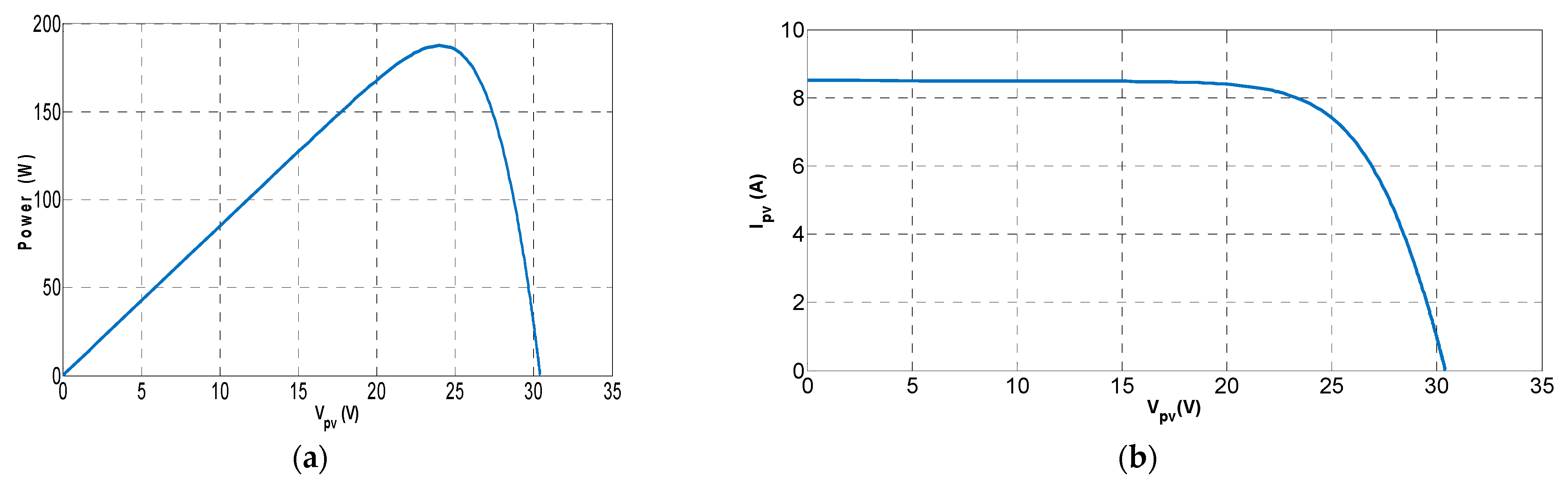
2.2. PV Model Description
2.3. Nonlinear Control Design
- (i)
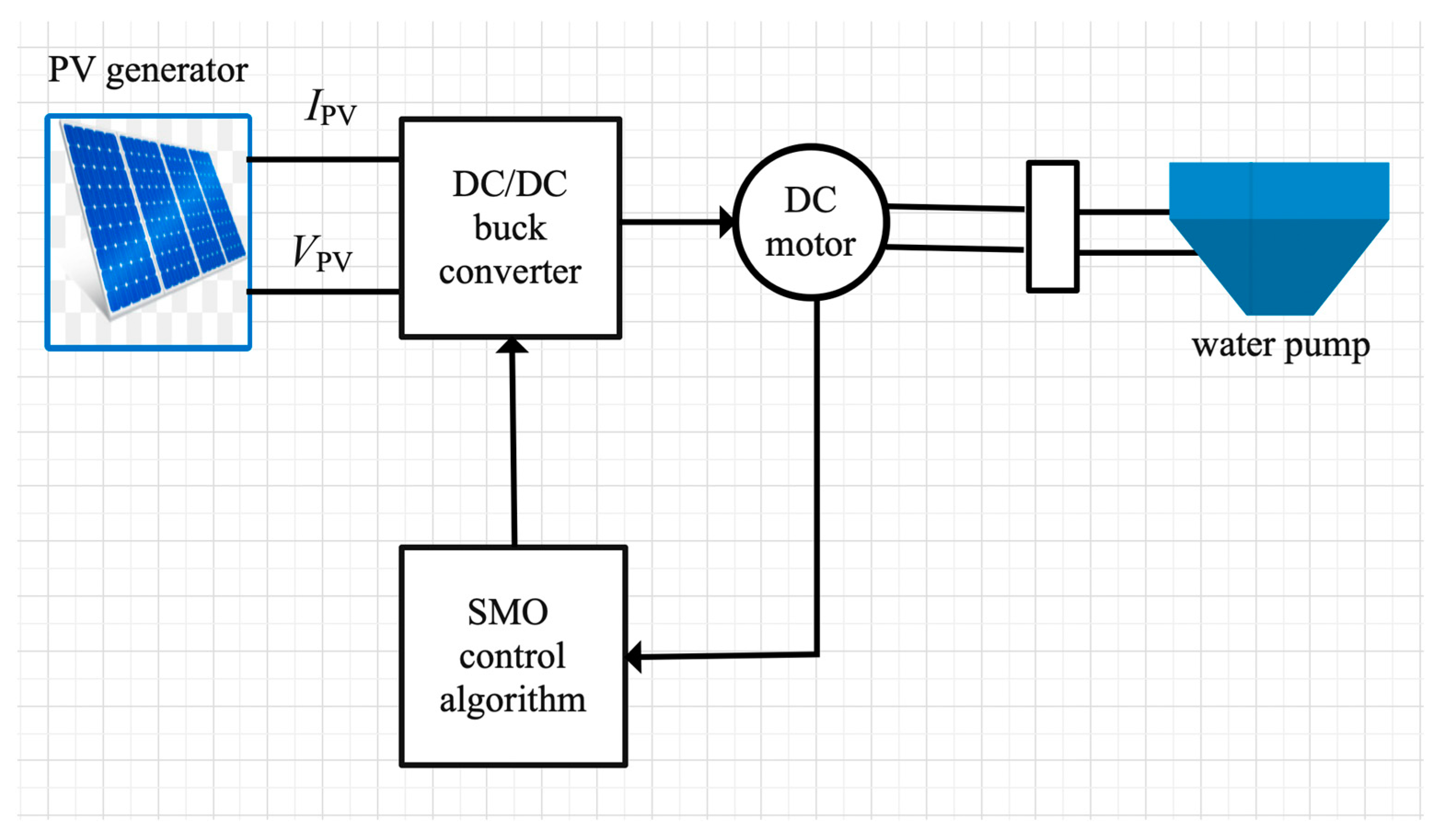
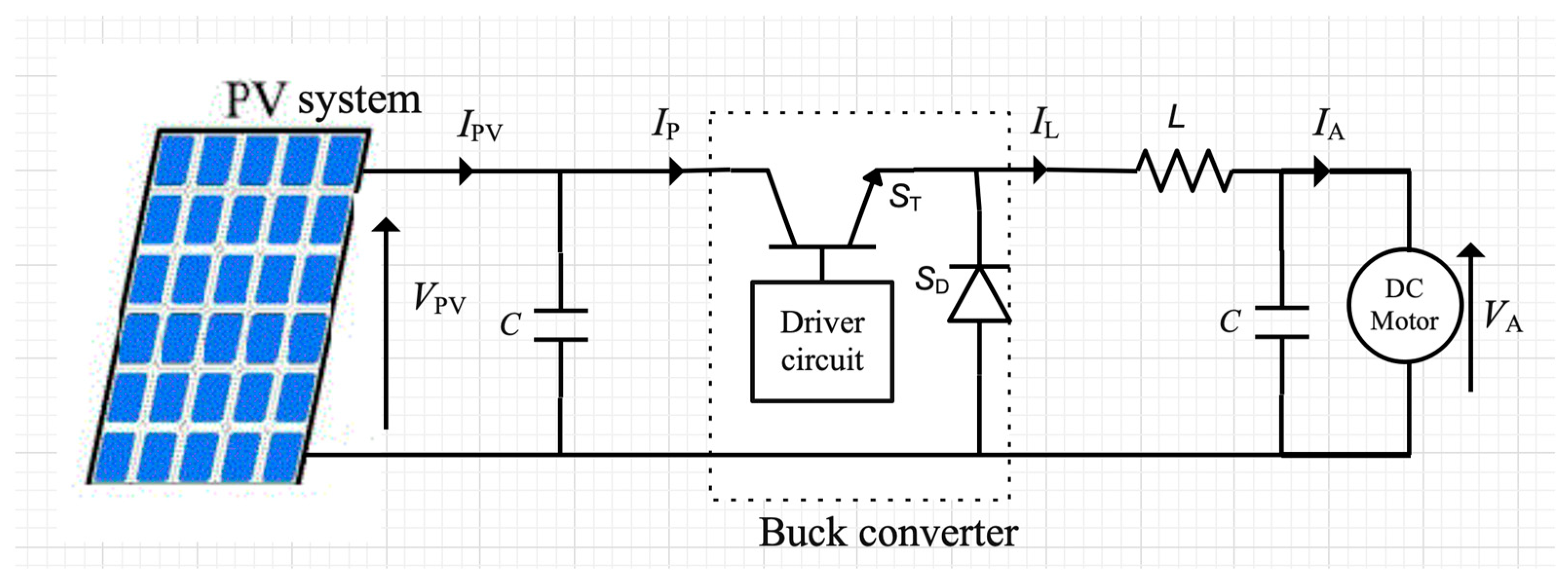
- Determining the PV system’s state space equations [38,39] aswhere C is a capacitor, L is an inductor, is the inductor current, and the mechanical losses are denoted by torques and in (21), which indicate the DC machine’s inertia and viscous friction coefficients, respectively; ; is also the motor’s moment of inertia; and , and denote random disturbance vector components.
- (ii)
- Expressing the system in the conventional standard configuration given bywhere stated in (22) is defined aswhich denotes the state vector that considers the motor current, motor angular position, inductance current, and DC motor supply voltage. In addition, we have that
- (iii)
- Stating and , which denote the armature resistance and inductance, as mentioned, respectively; and , which denote the DC machine’s inertia and viscous friction coefficients, as also mentioned, respectively; and C which represents the capacitor, as mentioned.
- (iv)
- Computing the relative degree by deriving y up to the point, when the control variable materializes to equations given bywhich is attained from r . Note that this approach emphasizes developing a control output that promotes the capacity of the PV system for output trajectory tracking, as well as for disturbance decoupling.
- (v)
- Expressing the input controller aswhere v is the control input.
3. Linearization, Sliding Modes, and Control Input Synthesis Methodology
3.1. Input/Output Linearization and Second-Order Sliding Modes
3.2. Implementation of the Disturbance-Free Control Model
3.3. Control Implementation in Presence of Model Disturbances
3.4. Analytic SOSM and Nonlinear Implementation
4. Control Design Based on the Slime Mould Algorithm
4.1. Introduction to the Slime Mould Algorithm and Problem Expression
4.2. Fundamentals of the Concept
4.3. Algorithm Synthesis
| Algorithm 1 SMO control strategy |
| Step 1: Activate the PV system’s initial population as . Step 2: Fix the boundaries for all parameters. Step 3: Establish the fitness function expressed through . Step 4: Set the parameter population size of the SMO method and . Step 5: Fix the locations for the slime mould , for , as : 5.1 Compute the fitness function for all the slime mould. 5.2 Ascertain the function T (X,D) depicted by (7). 5.3 Calculate the control law expressed by (24). 5.4 Re-assess for the finest fitness . 5.5 State the weight W by way of (36). 5.6 Re-evaluate for the search portions. 5.7 Re-detect positions for each of the search portions through (37). 5.8 Do . Step 6: Resume . Step 7: Confirm the control formulated in (31). |
4.4. SMO Control Implementation and Simulation Breakdown
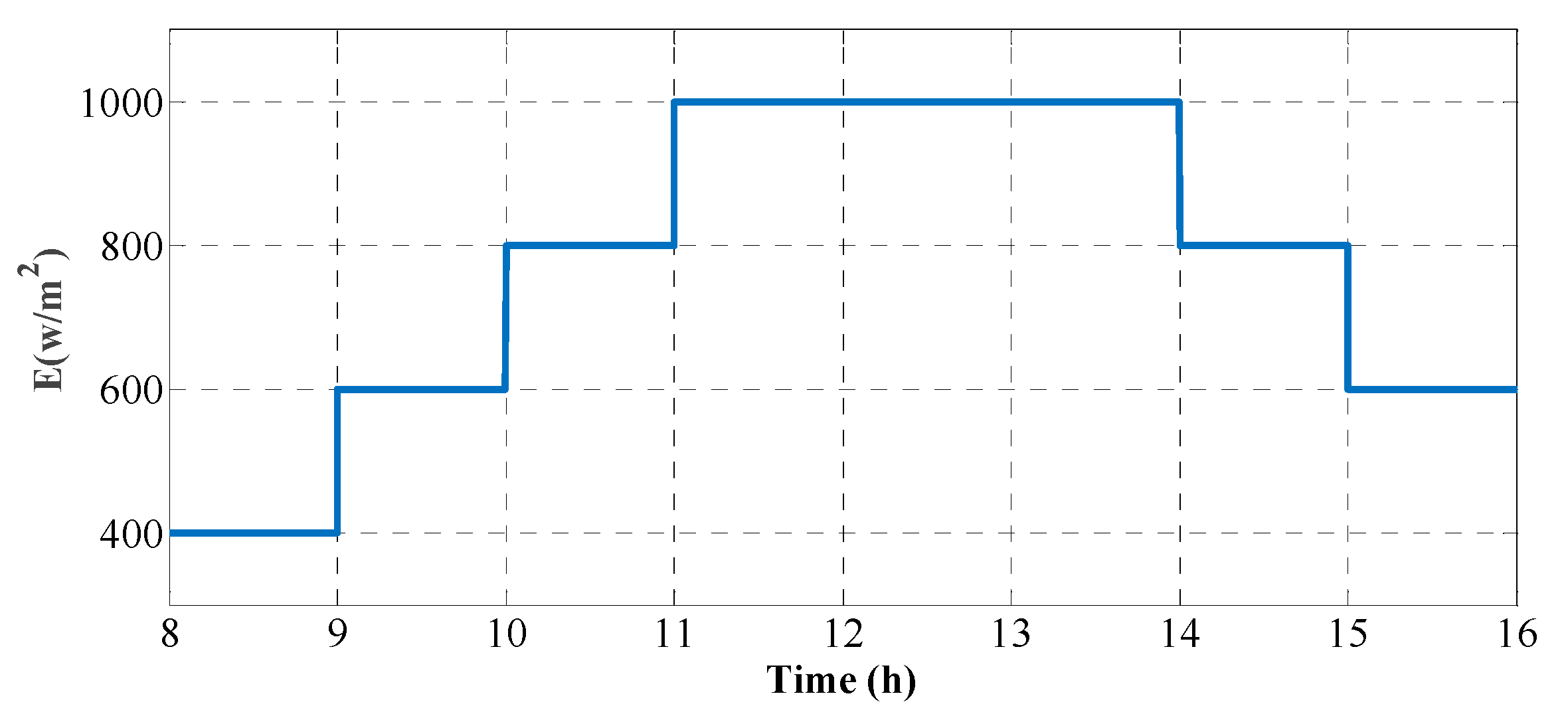
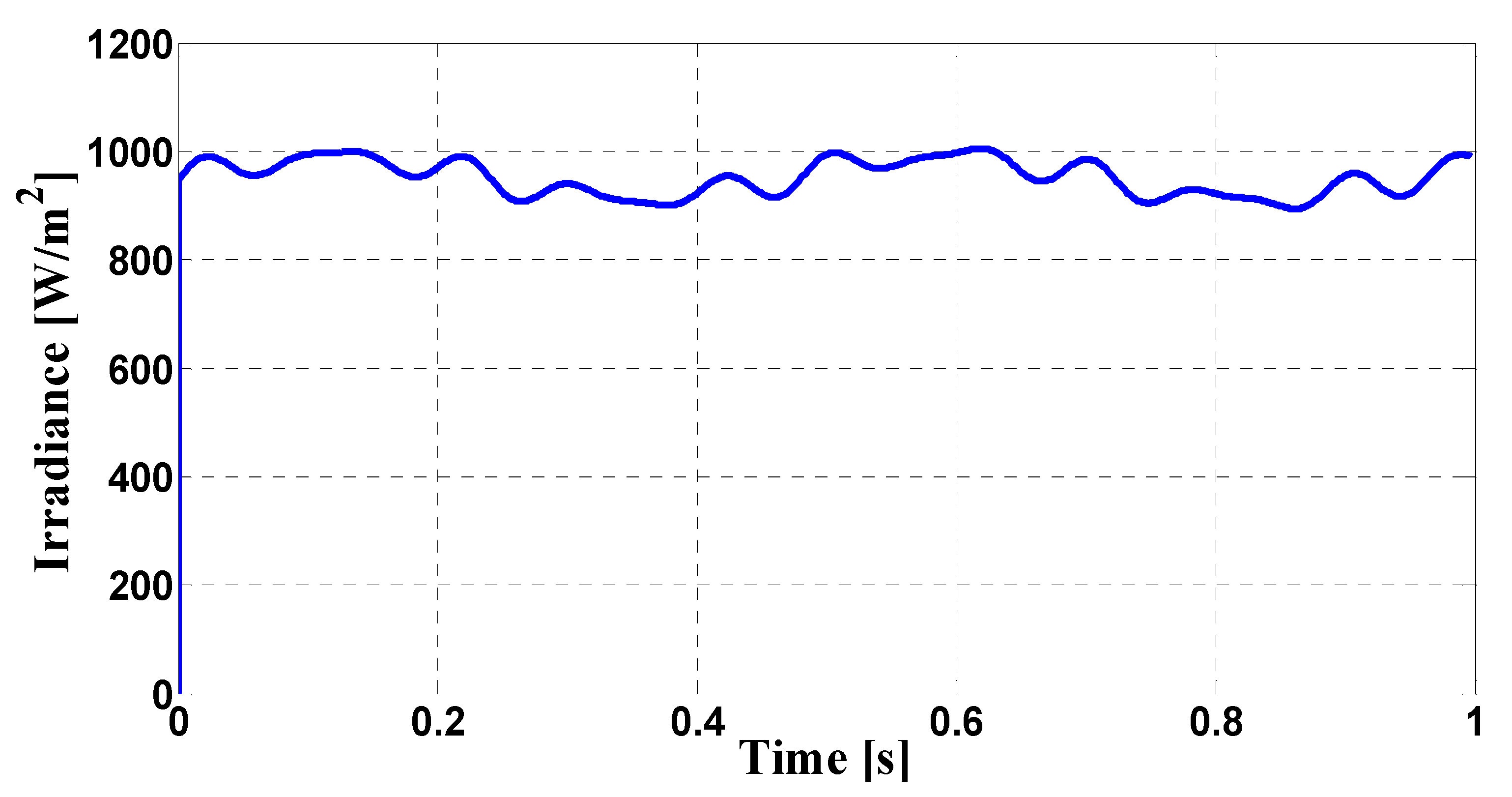
4.5. New Scenario under Natural Irradiance
- (i)
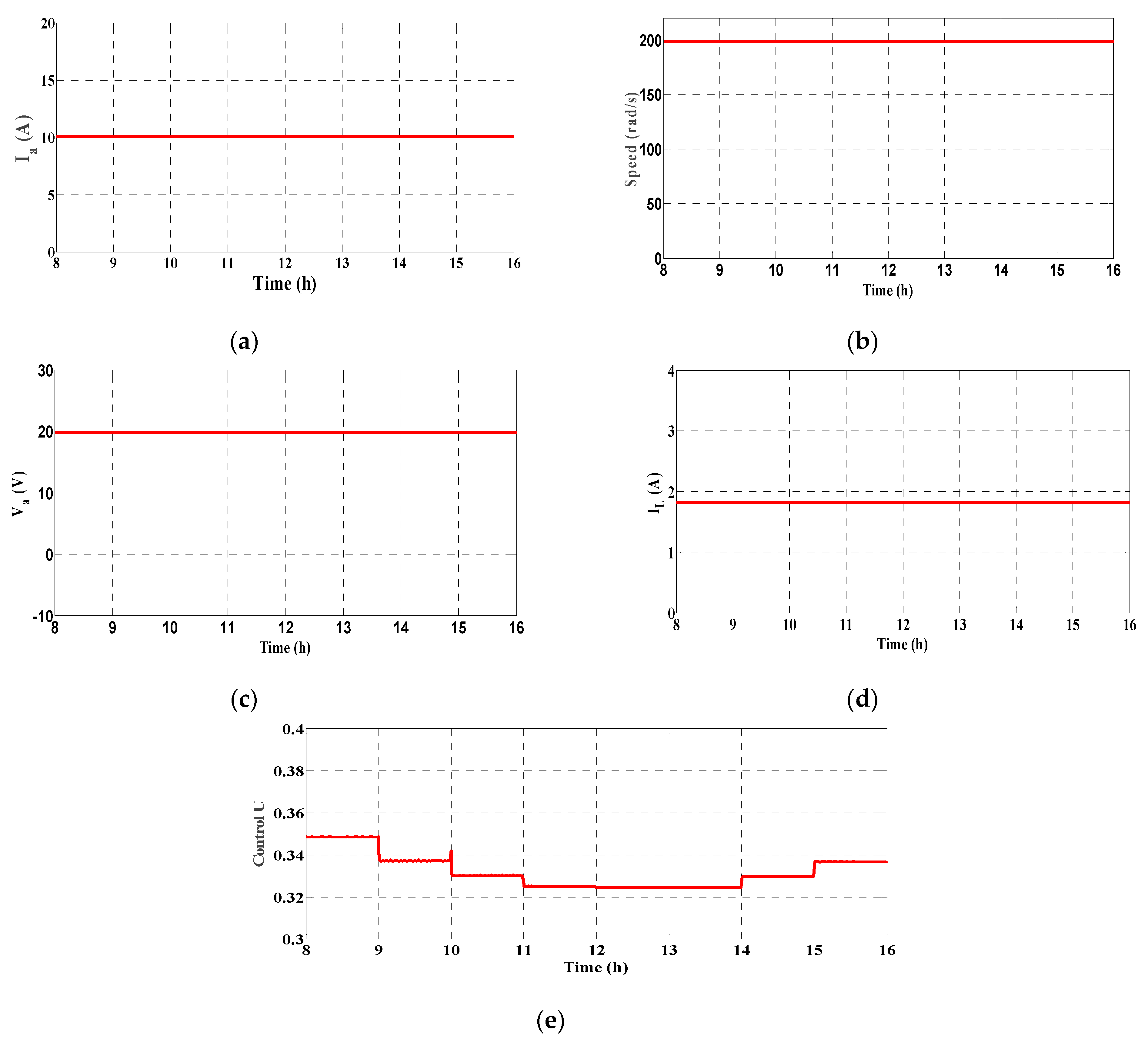
- We state clearly that our designed scheme offers satisfactory performance as can be seen in Figure 16.
- (ii)
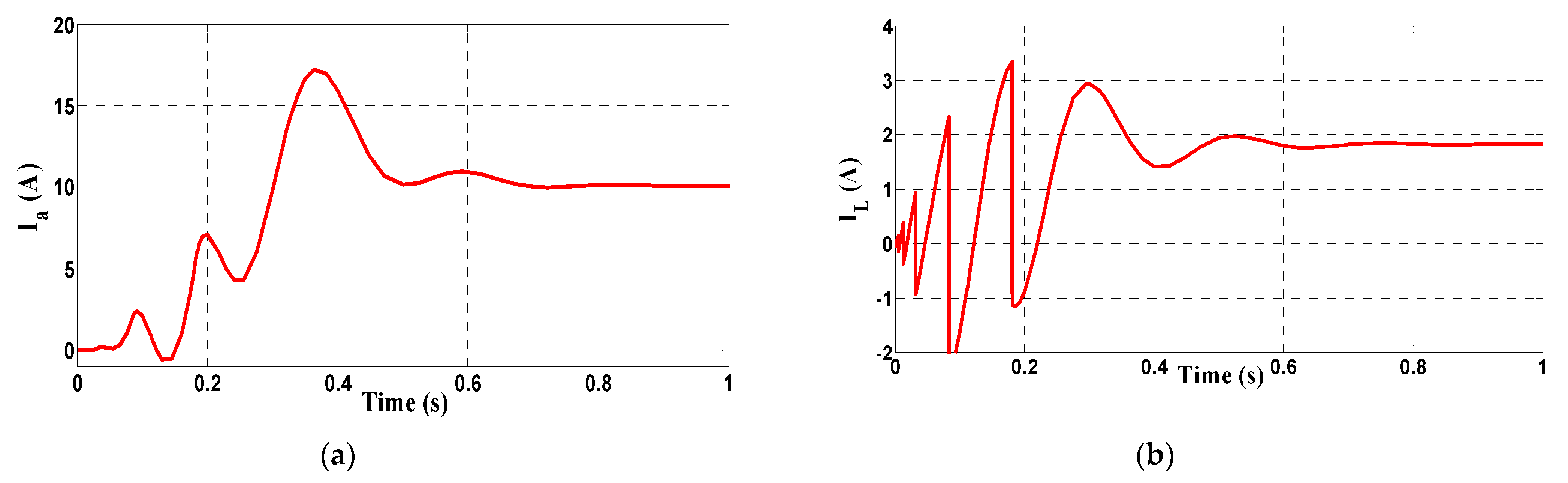
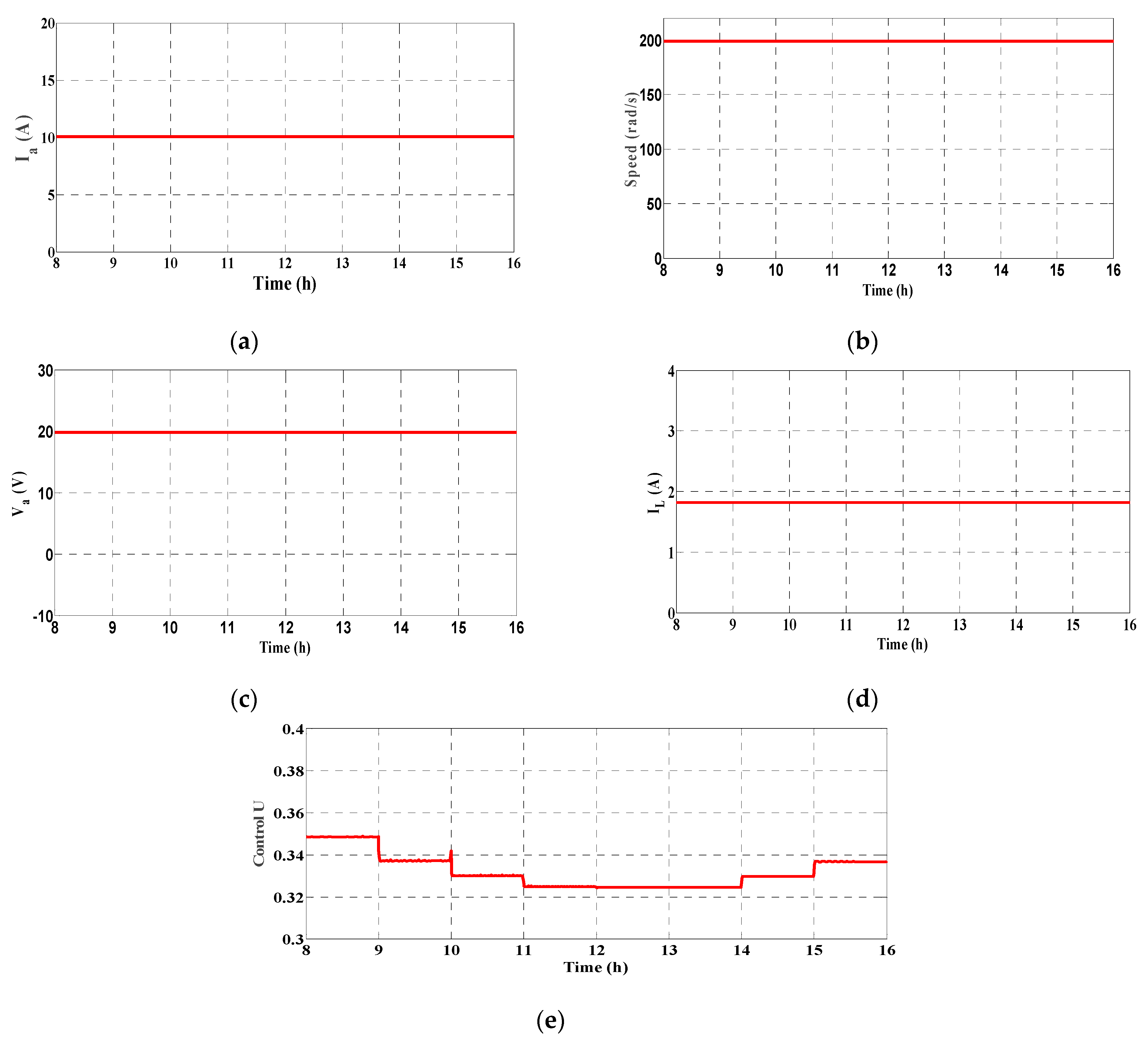
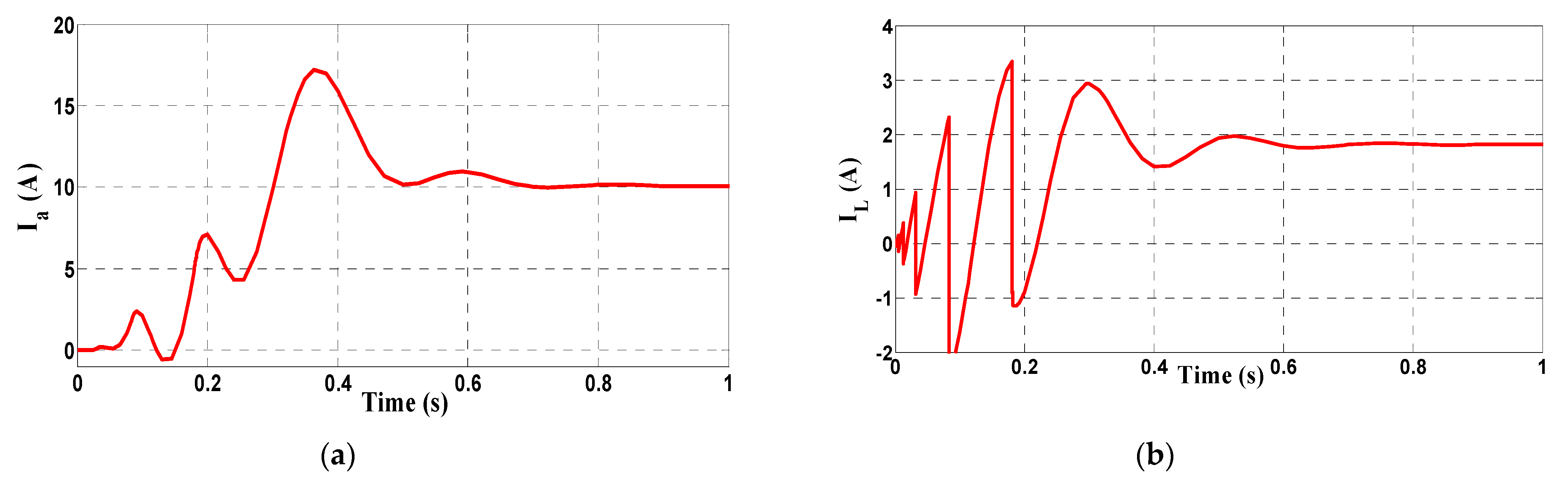
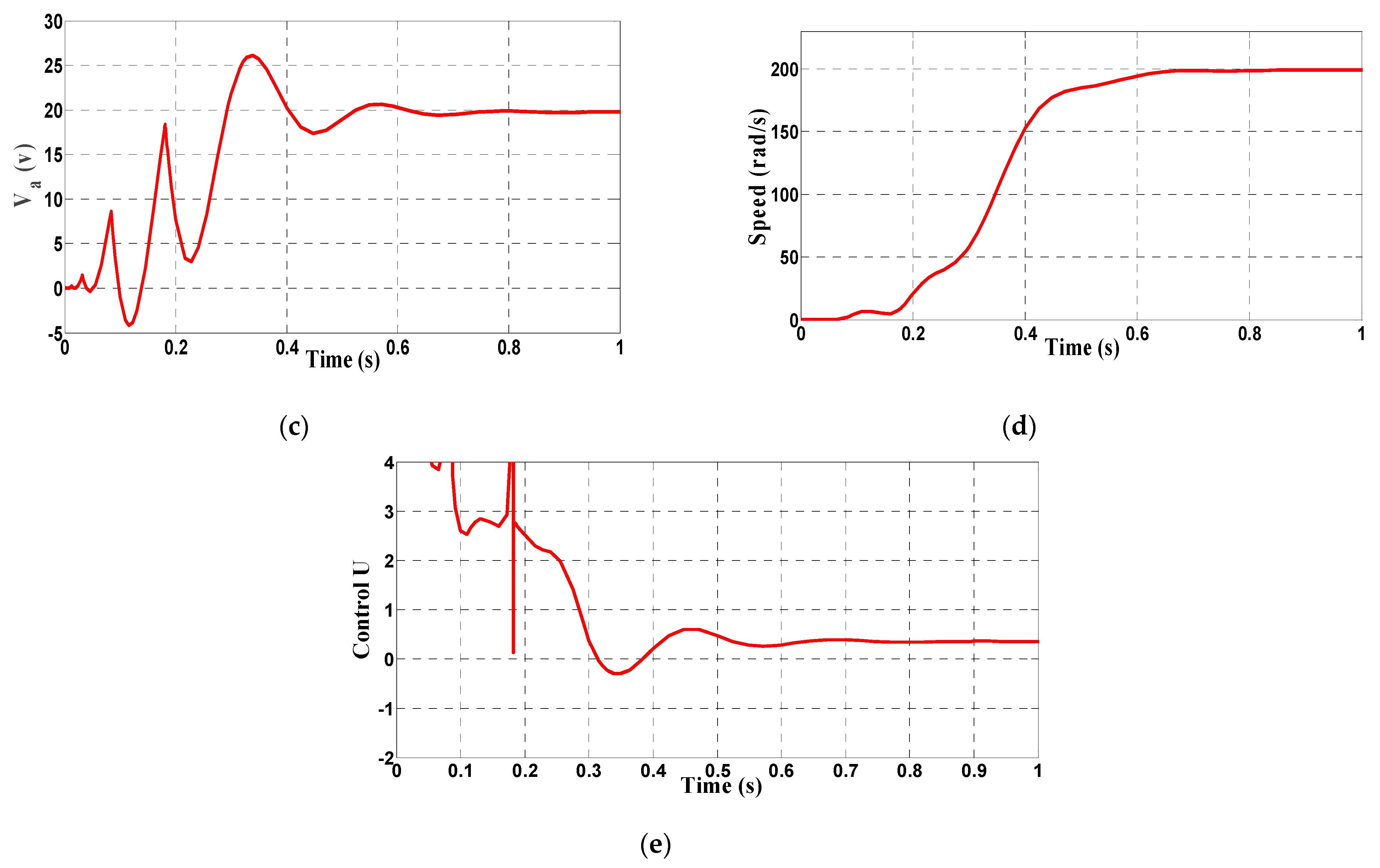
- The first study is performed by using the fundamental FBL technique without applying disturbing signals to the closed-loop system. This fact is shown in Figure 17. Notice that FBL provides high performance in stabilizing the controlled system.
- (iii)
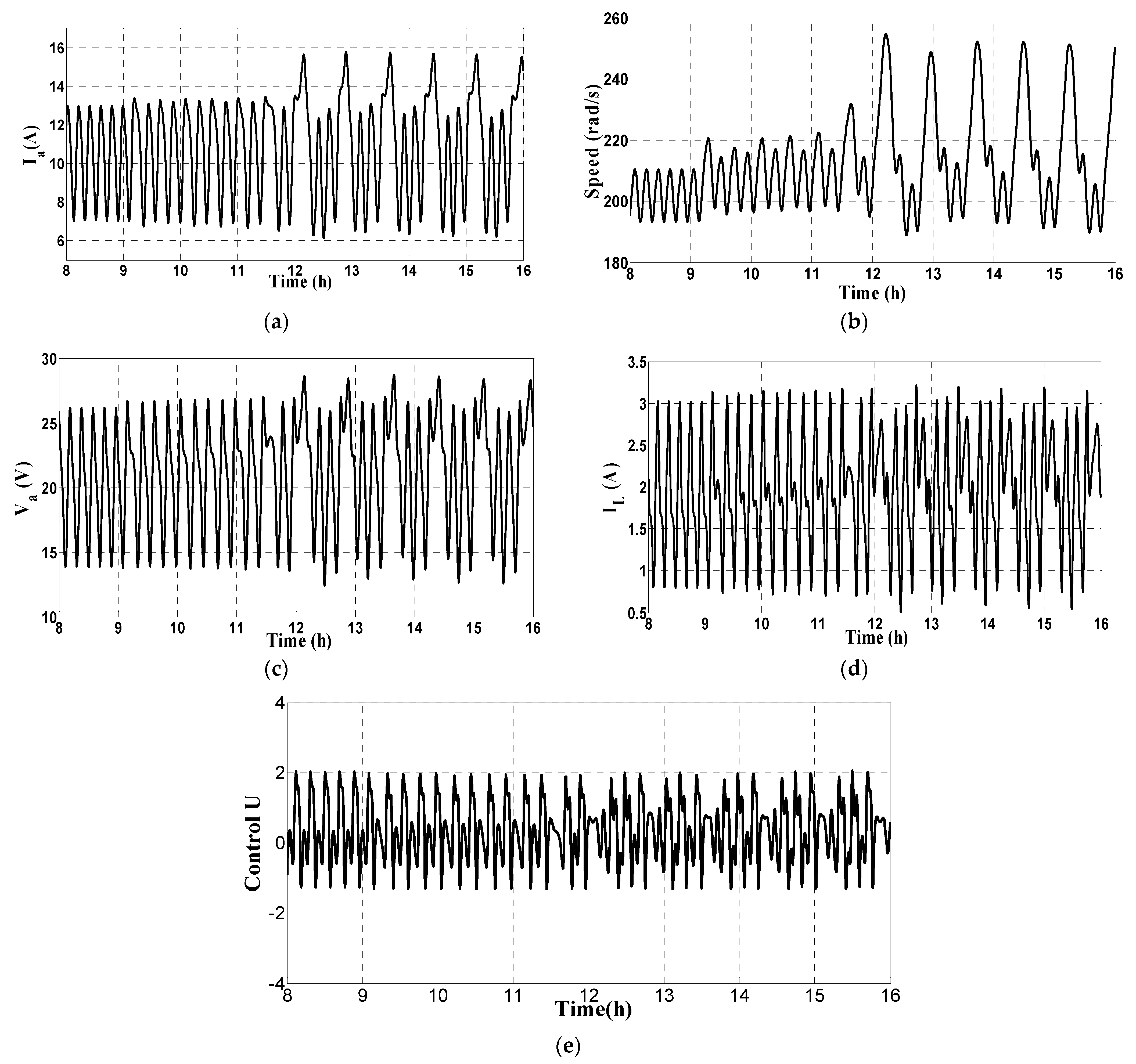
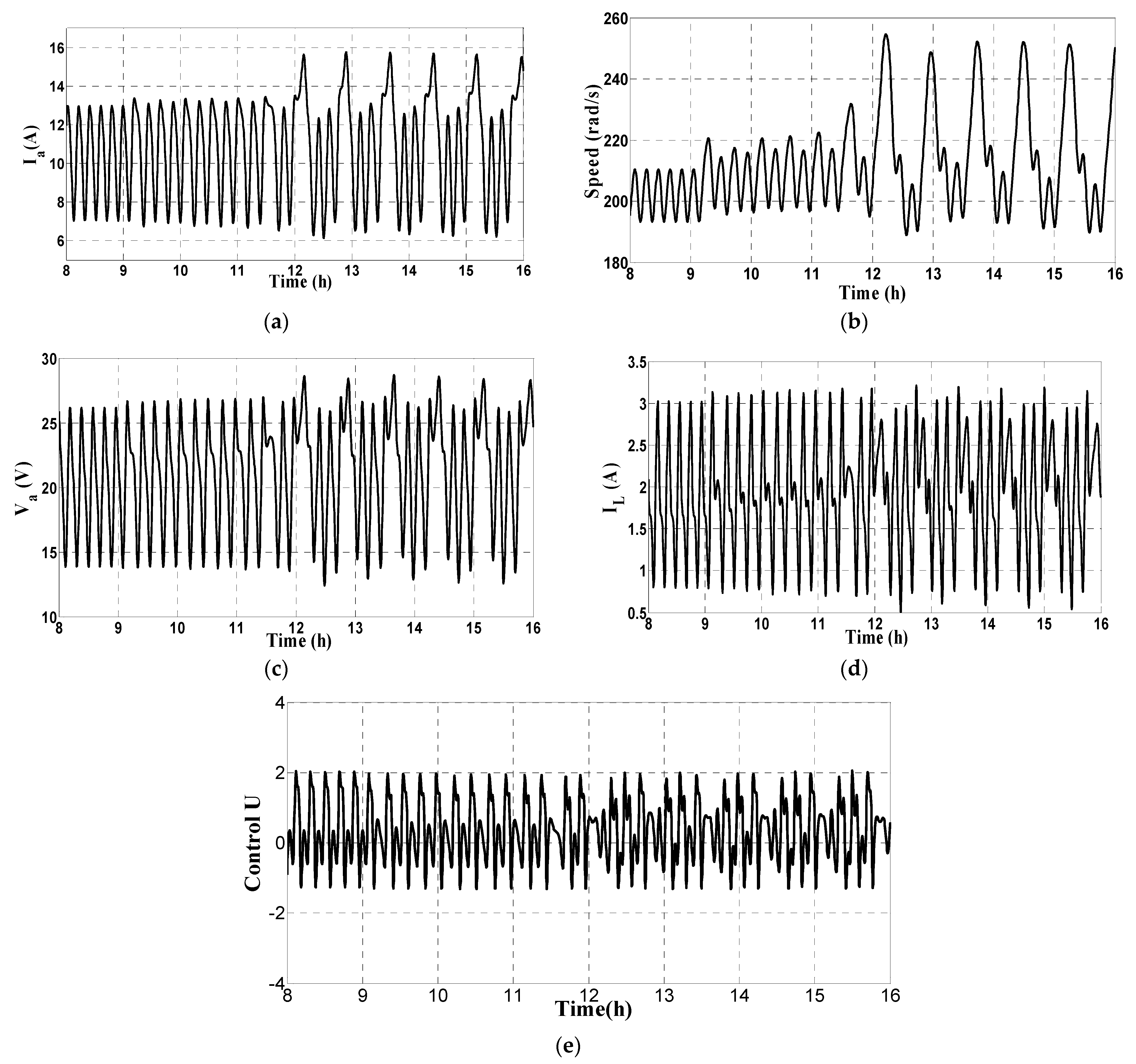
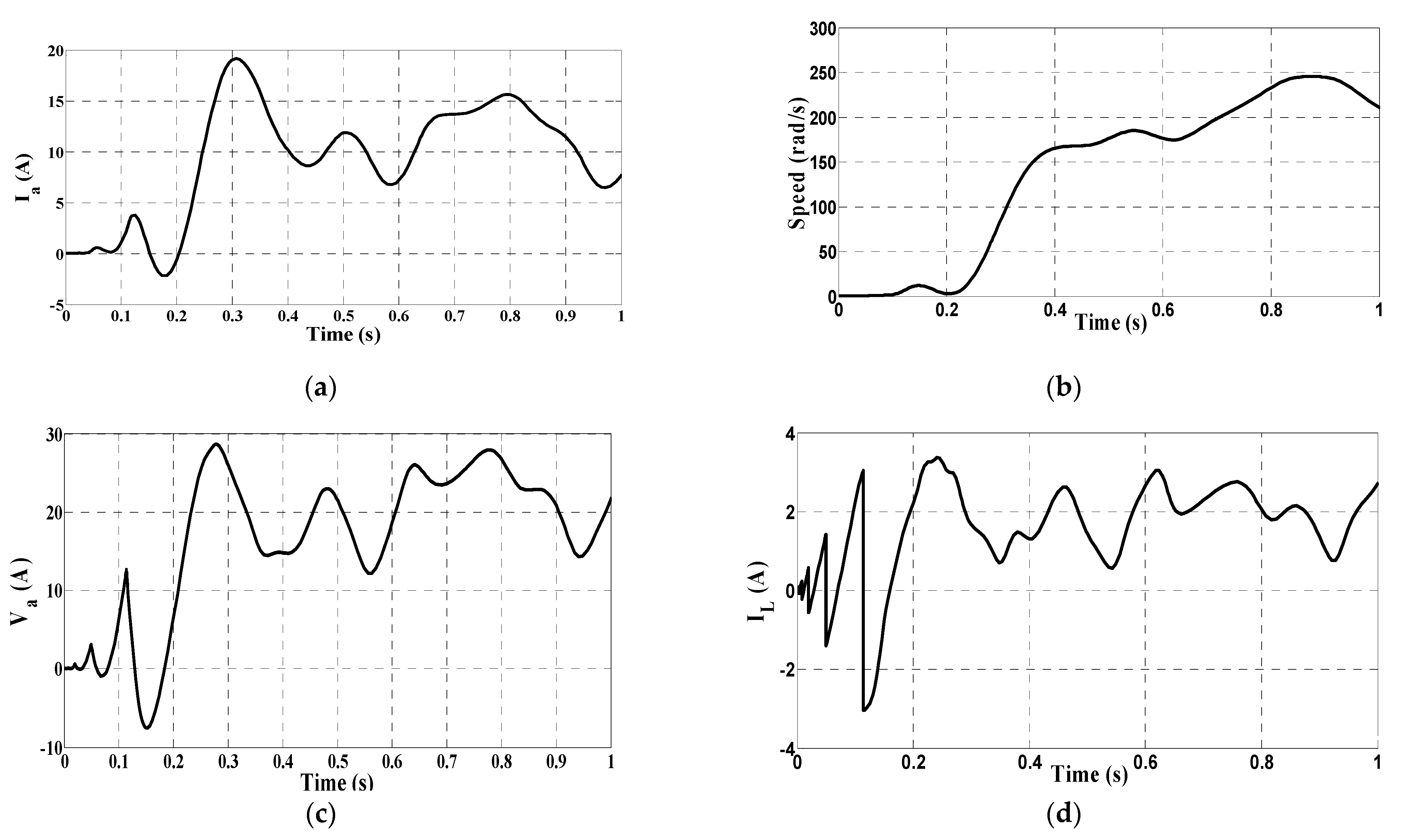
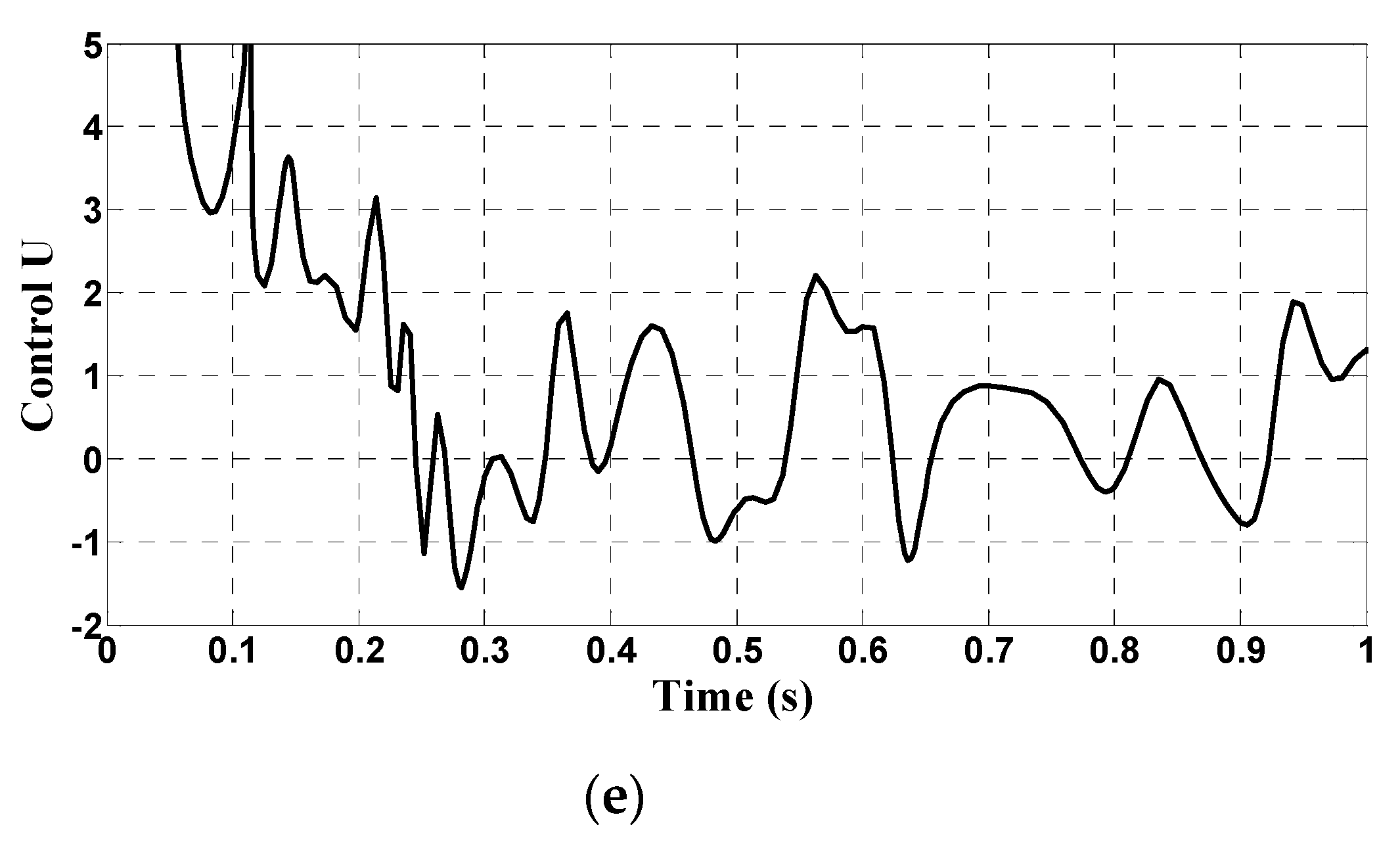
- The second study is conducted by considering disturbed random and matched signals, as shown in Figure 18. Note that the dynamical performance is highly affected.
- (iv)
- Observe that, in this new scenario, as expected, the FBL controller totally loses its dynamical performance.
- (v)
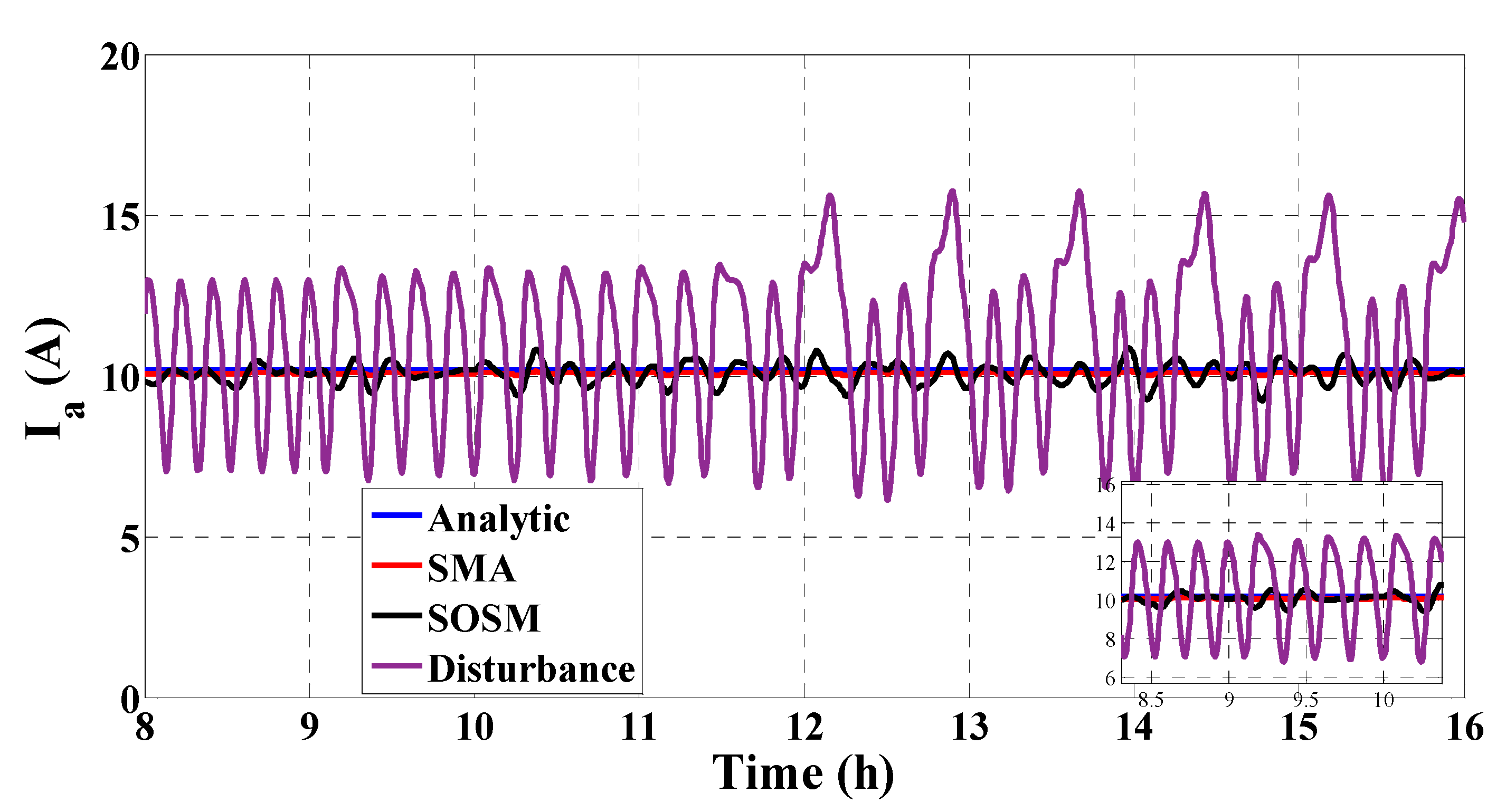
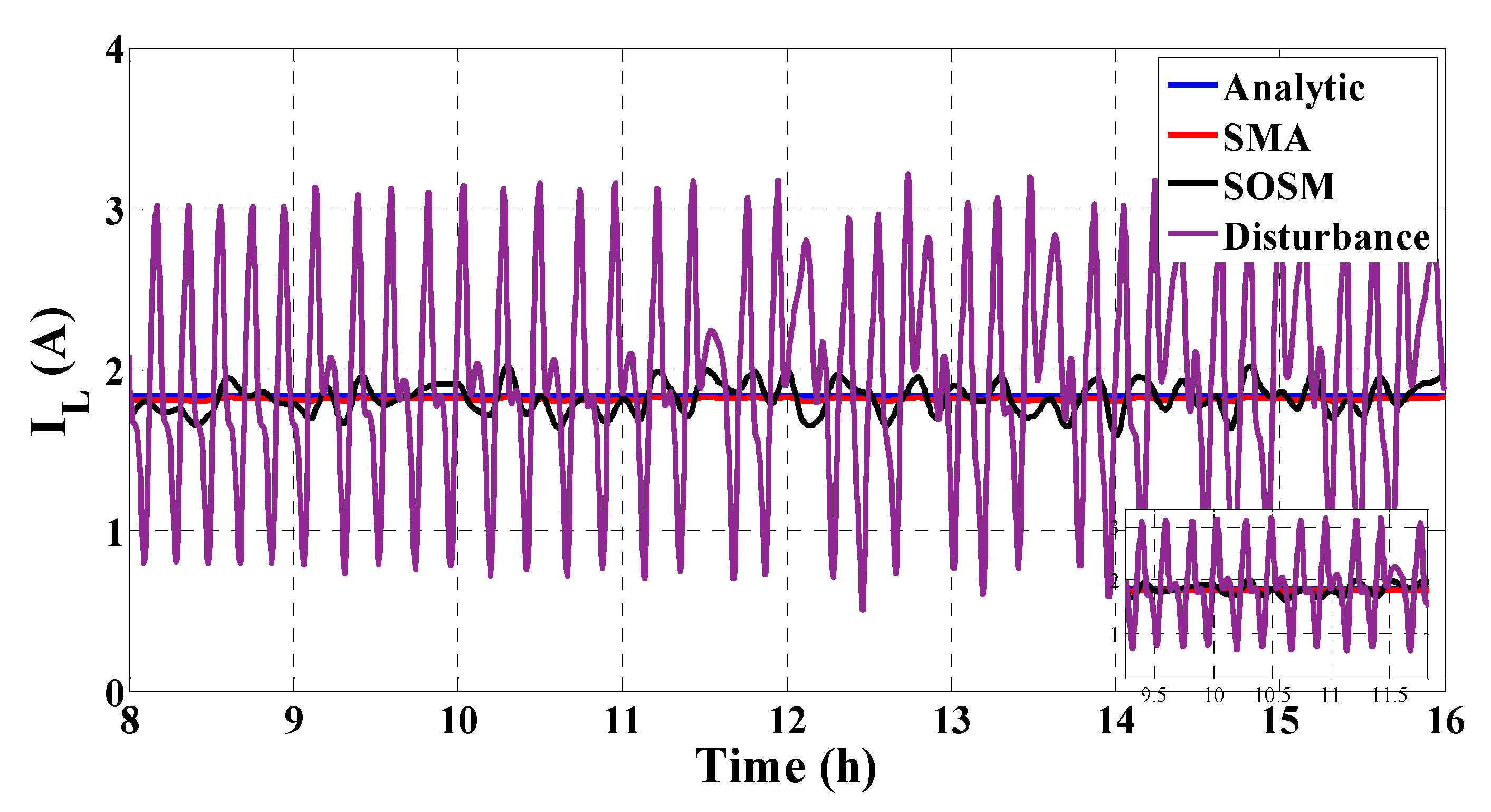
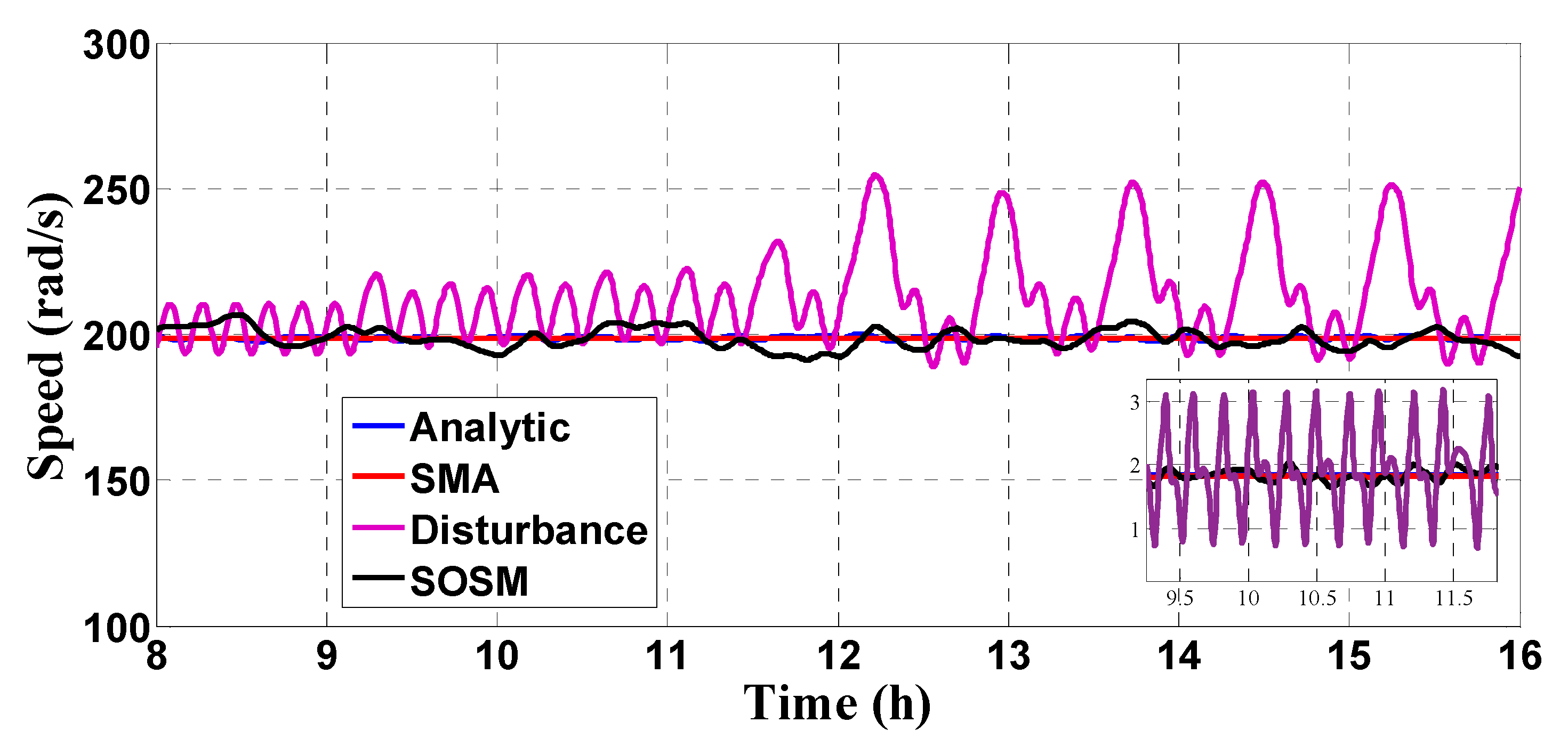
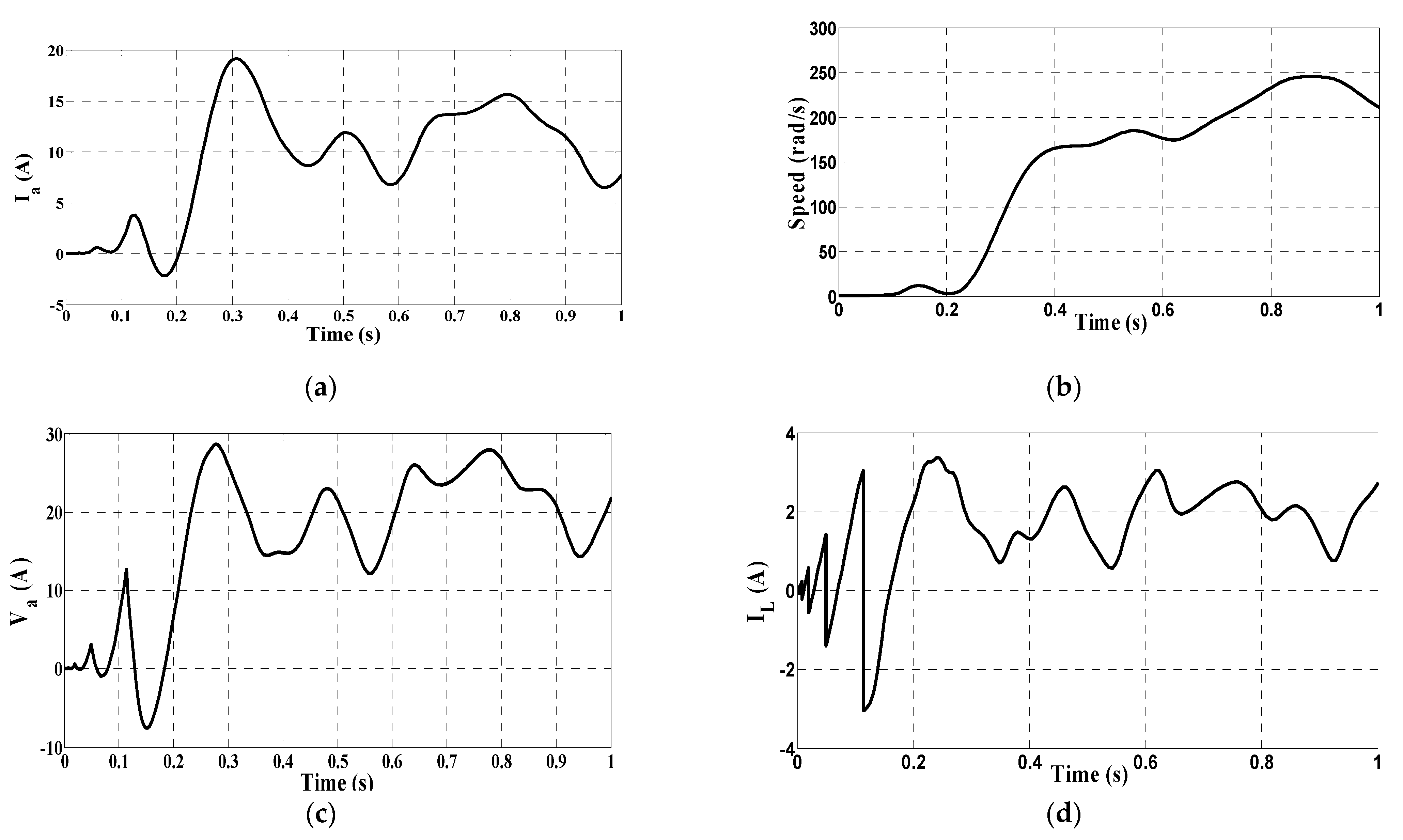
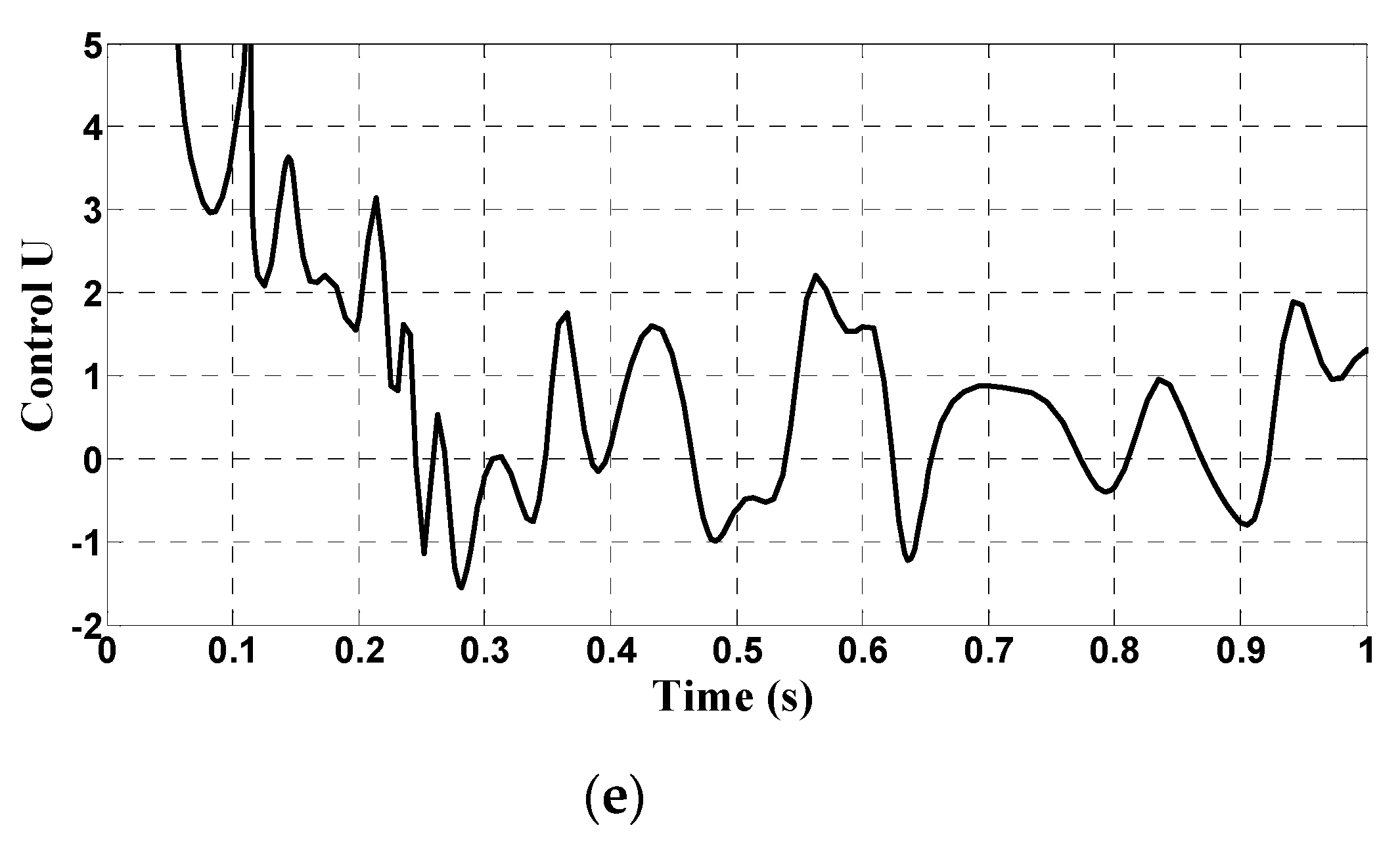
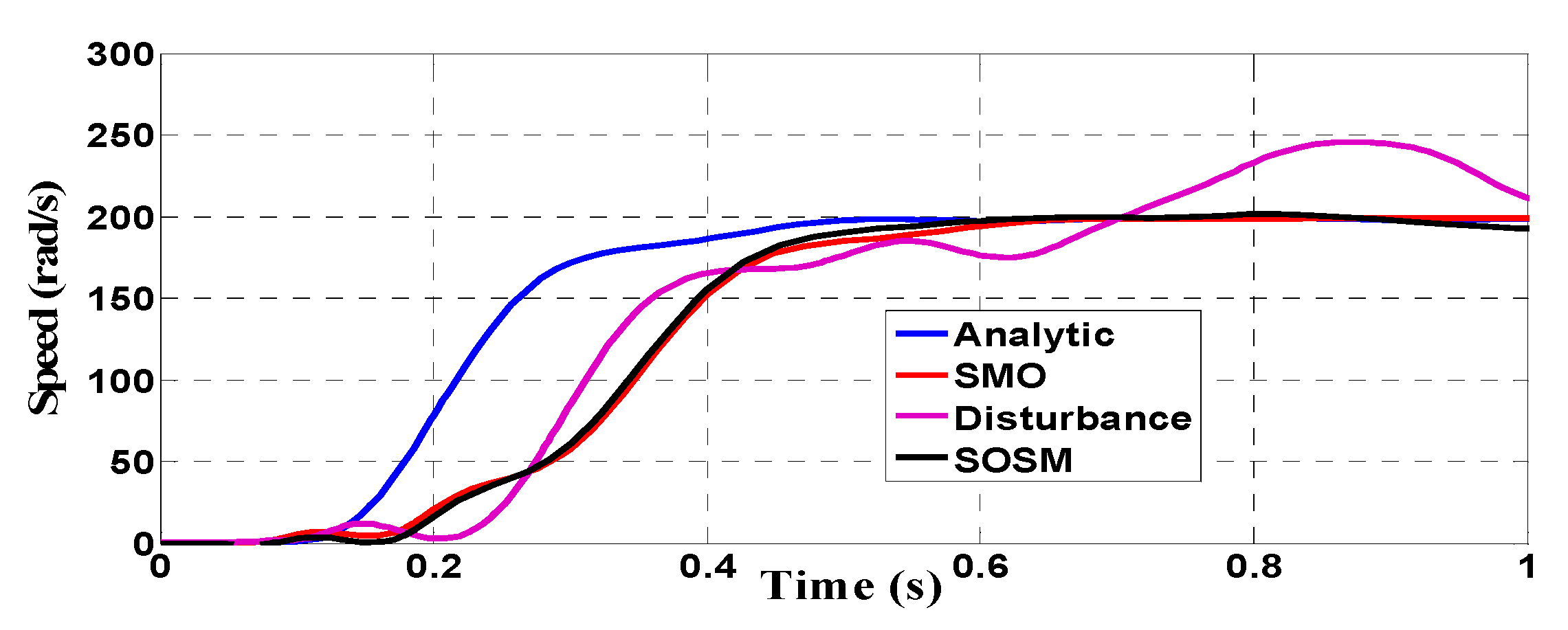
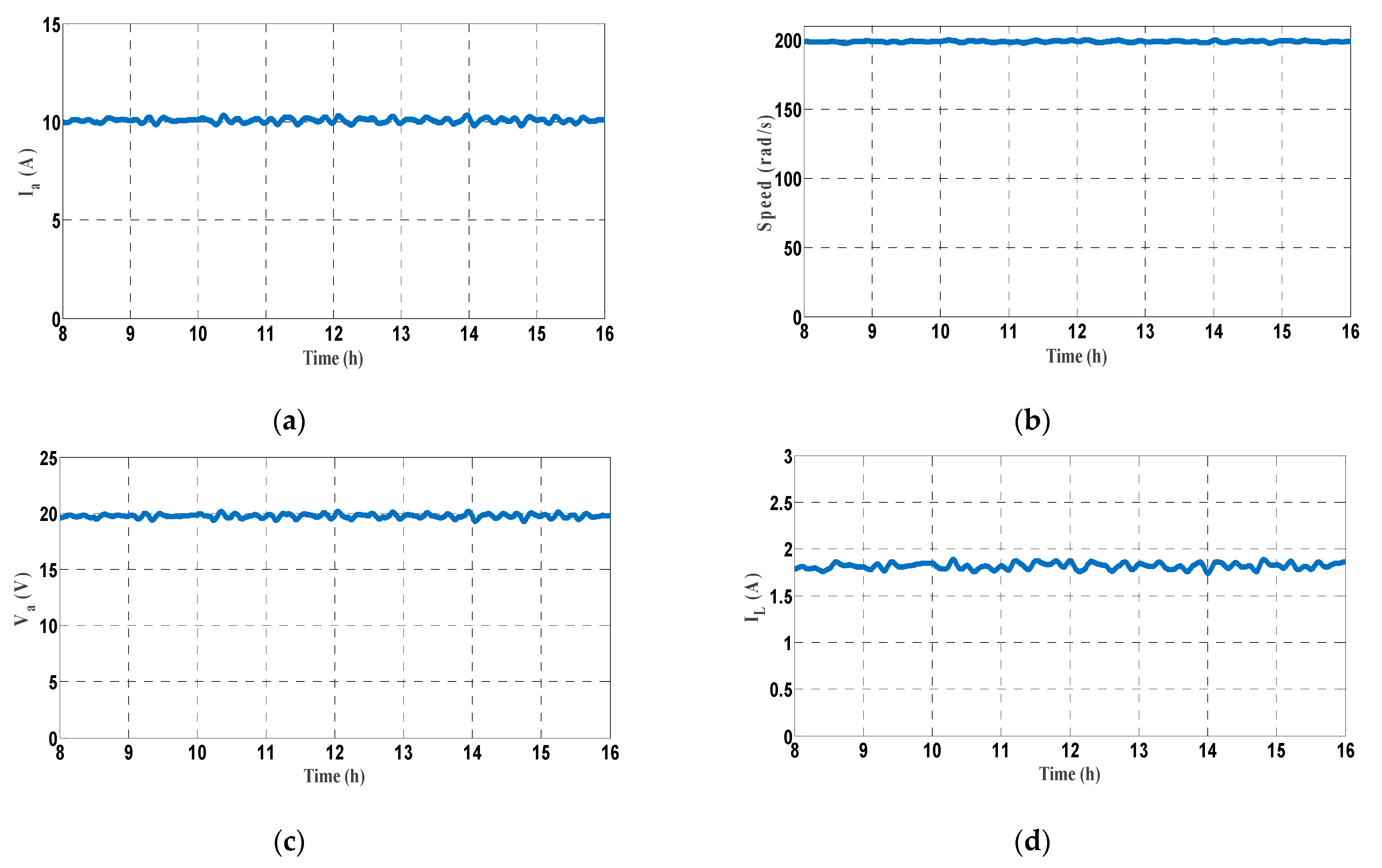
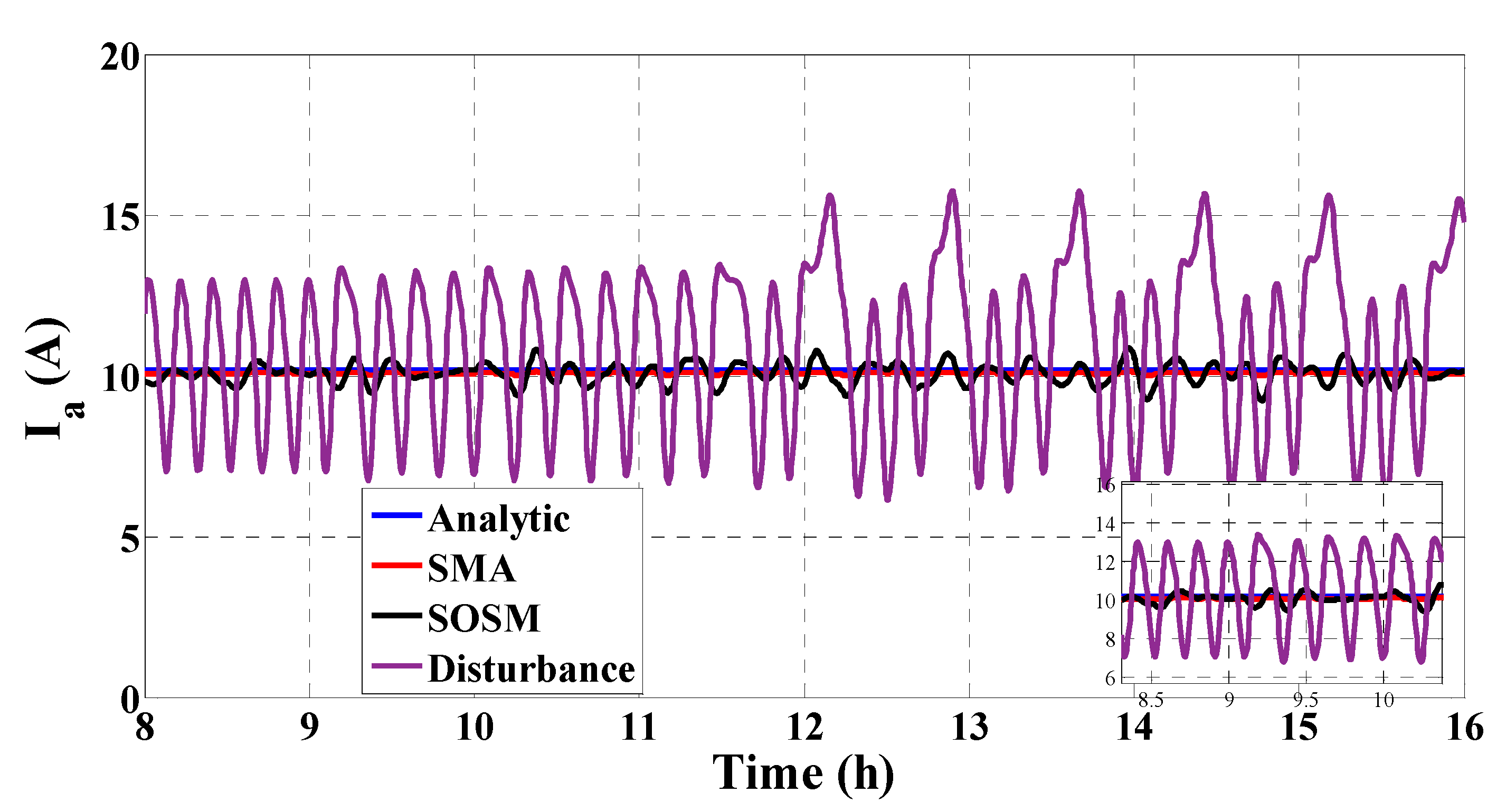
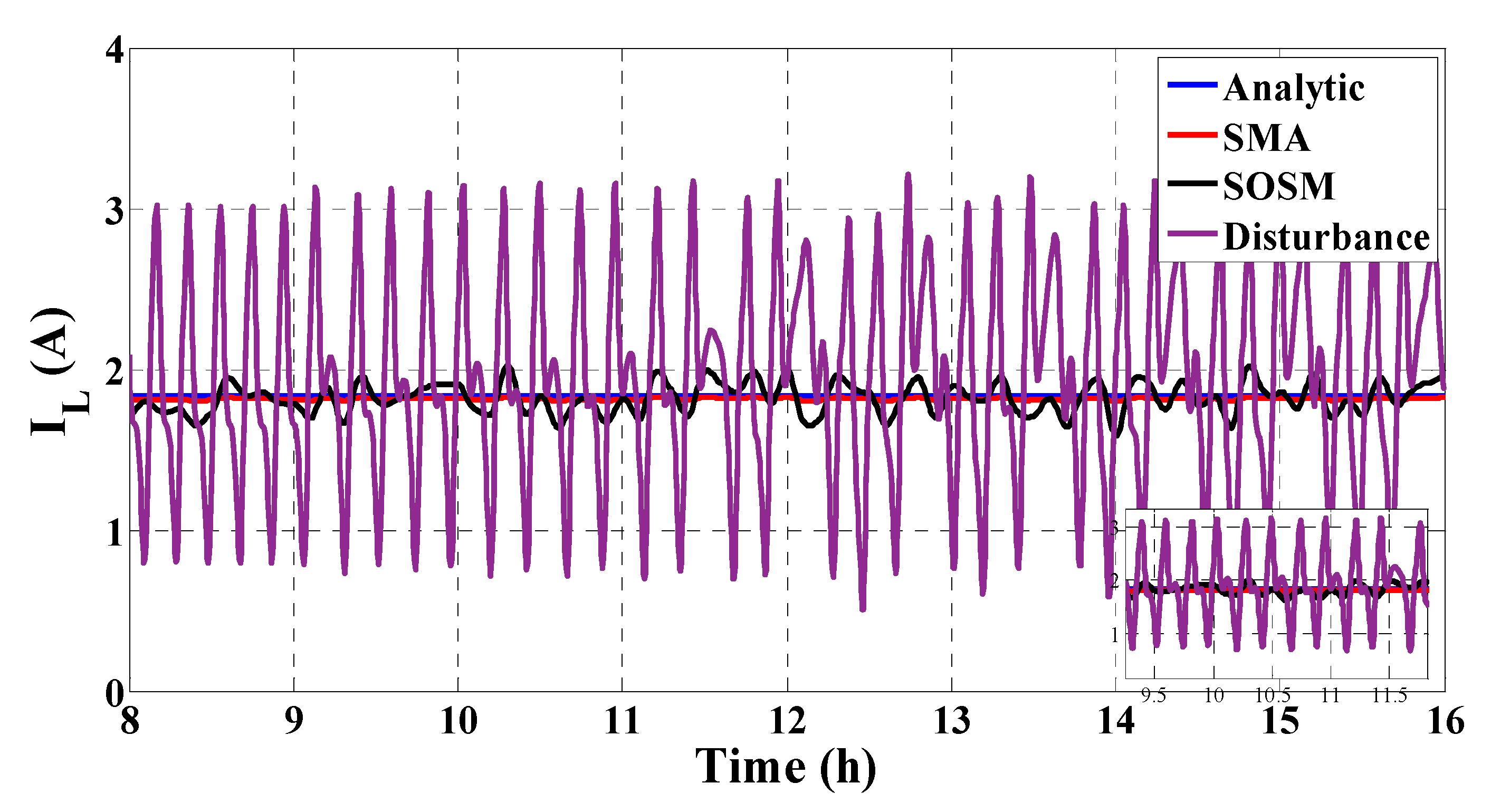
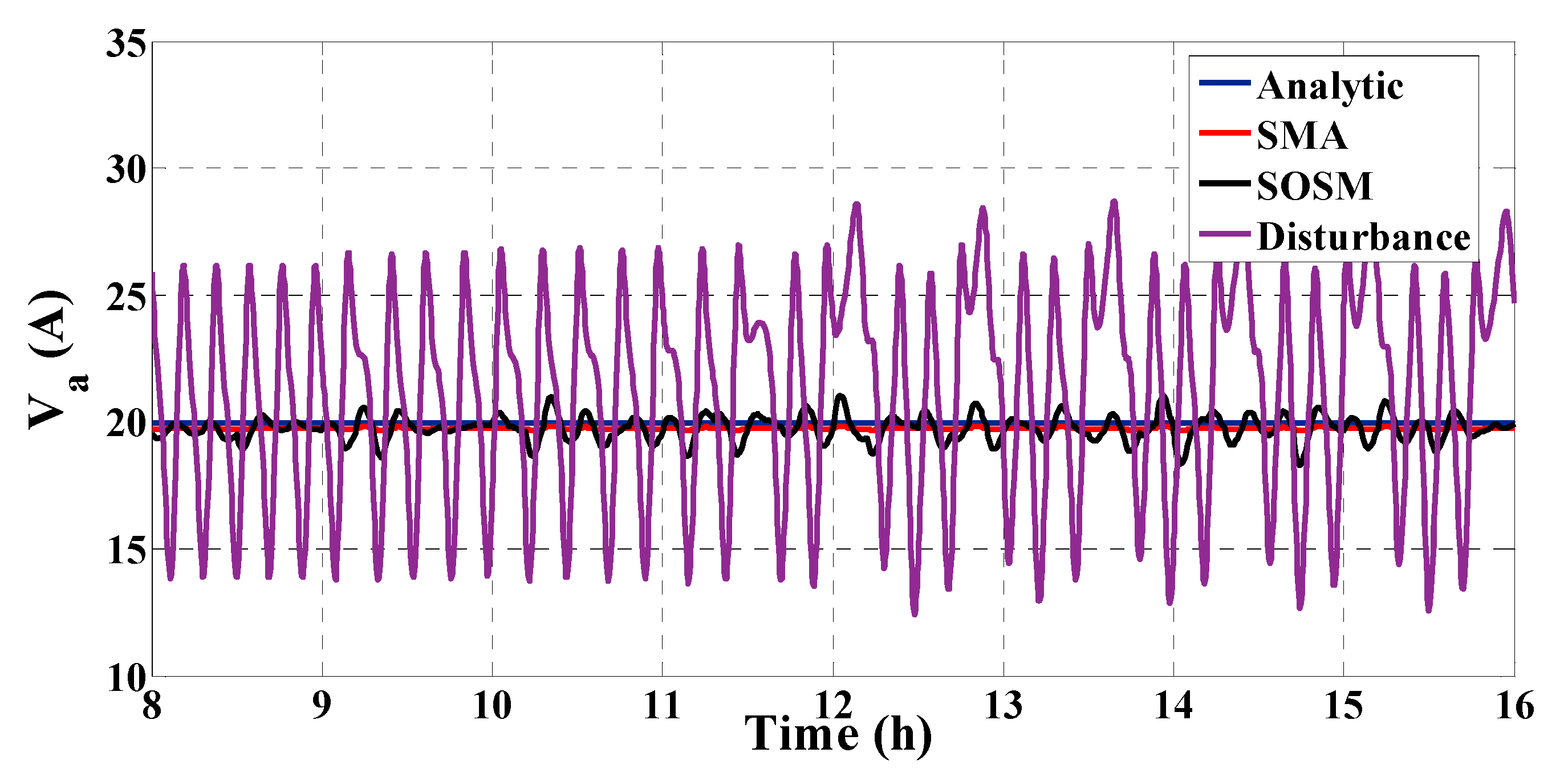
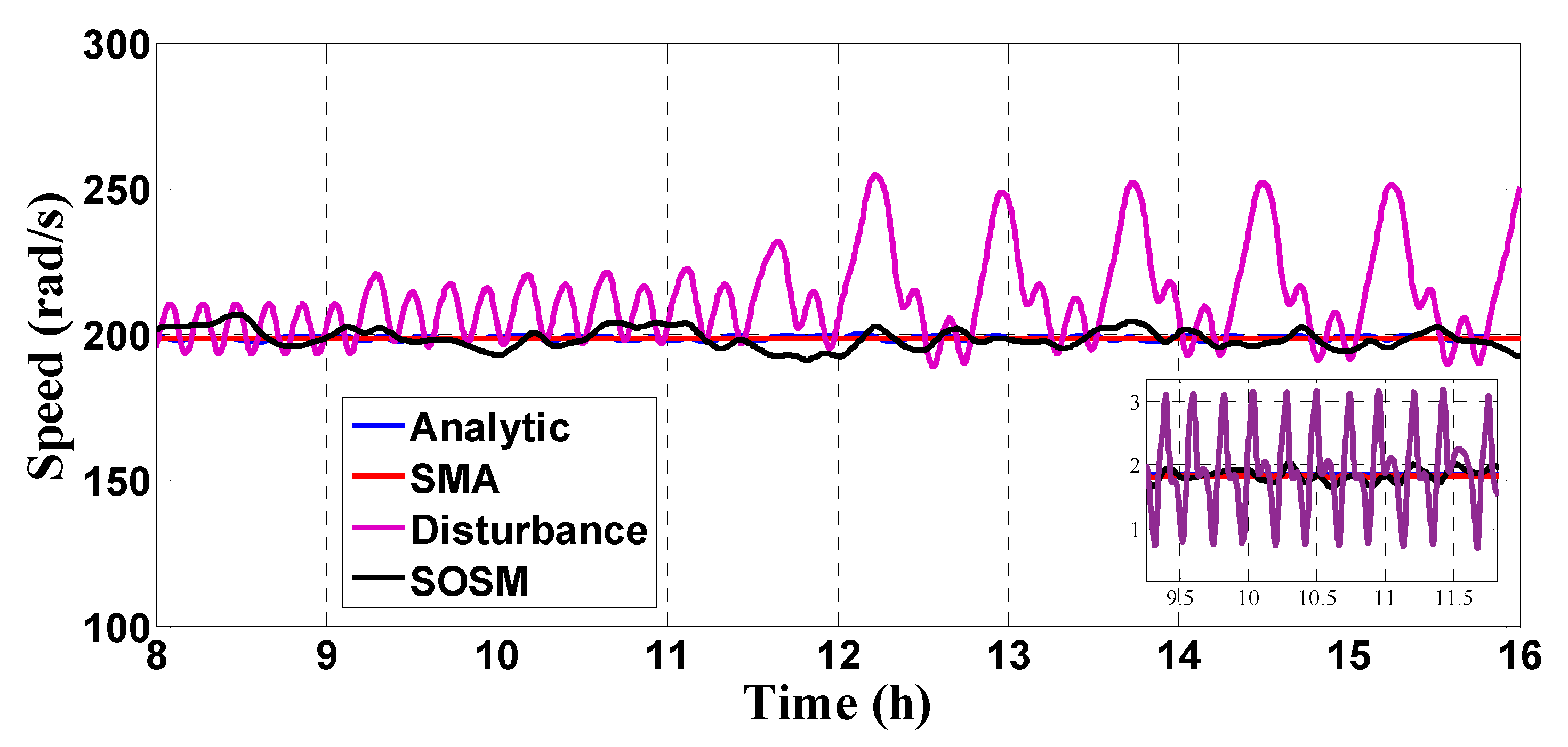
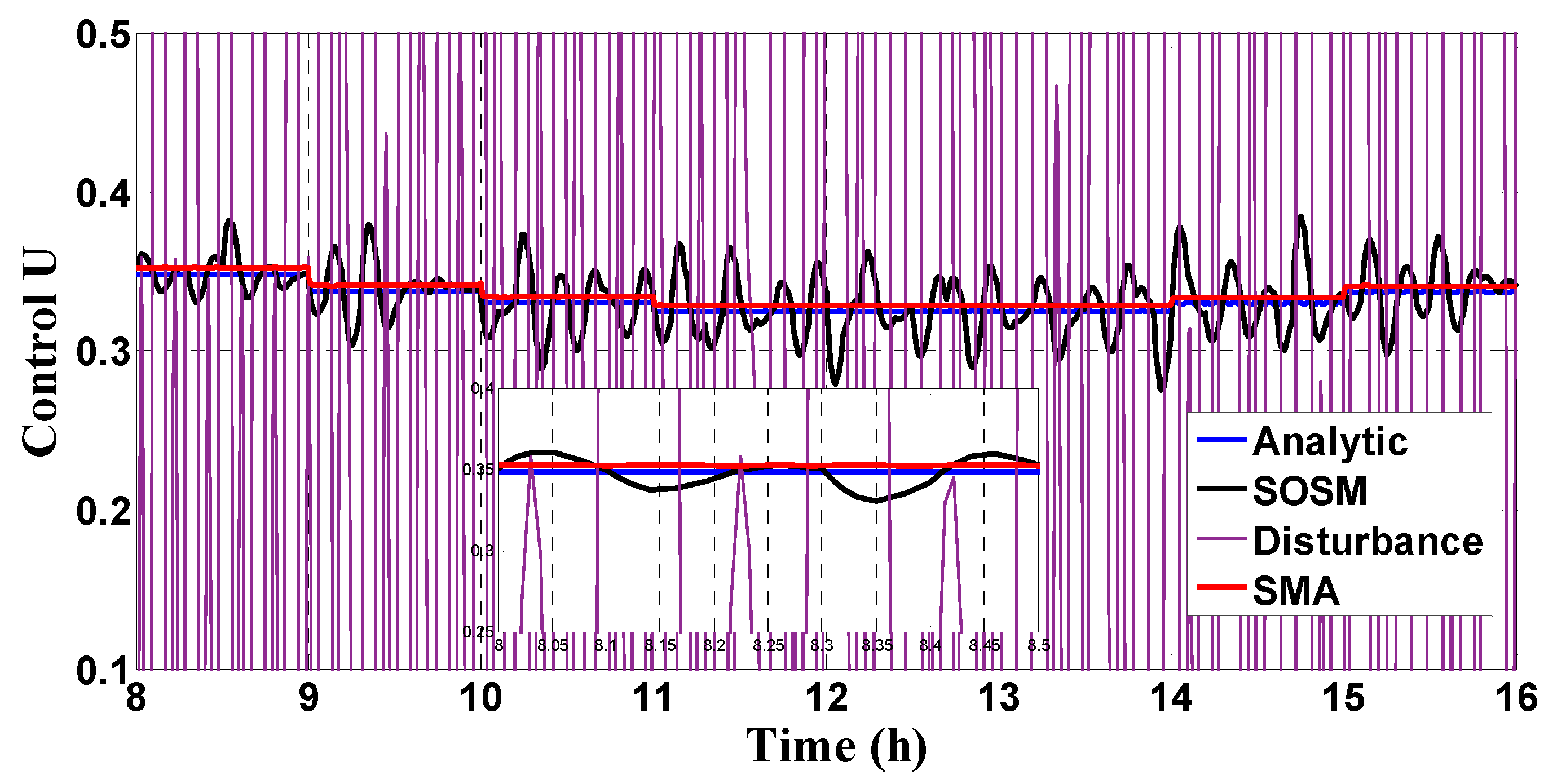
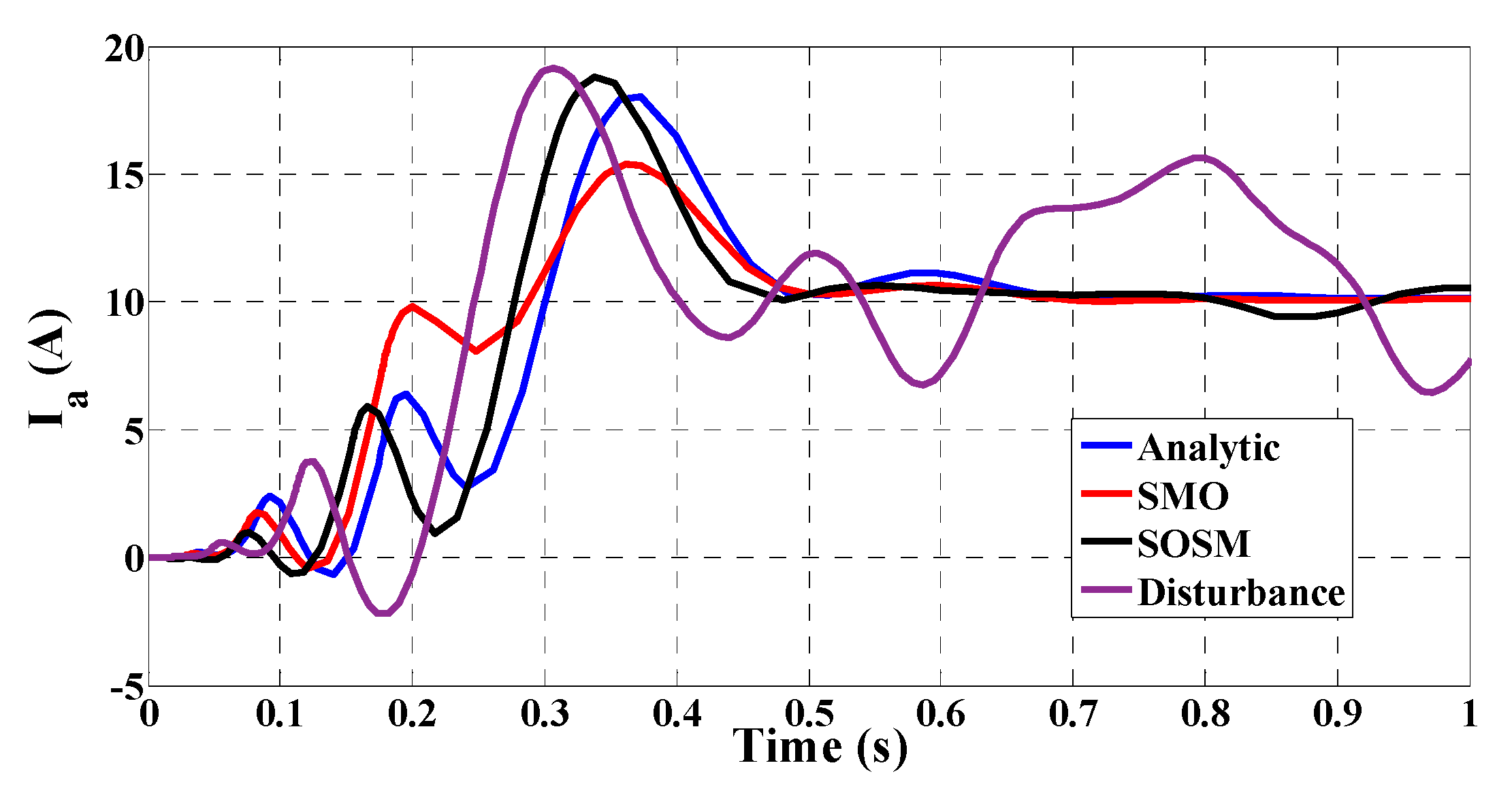
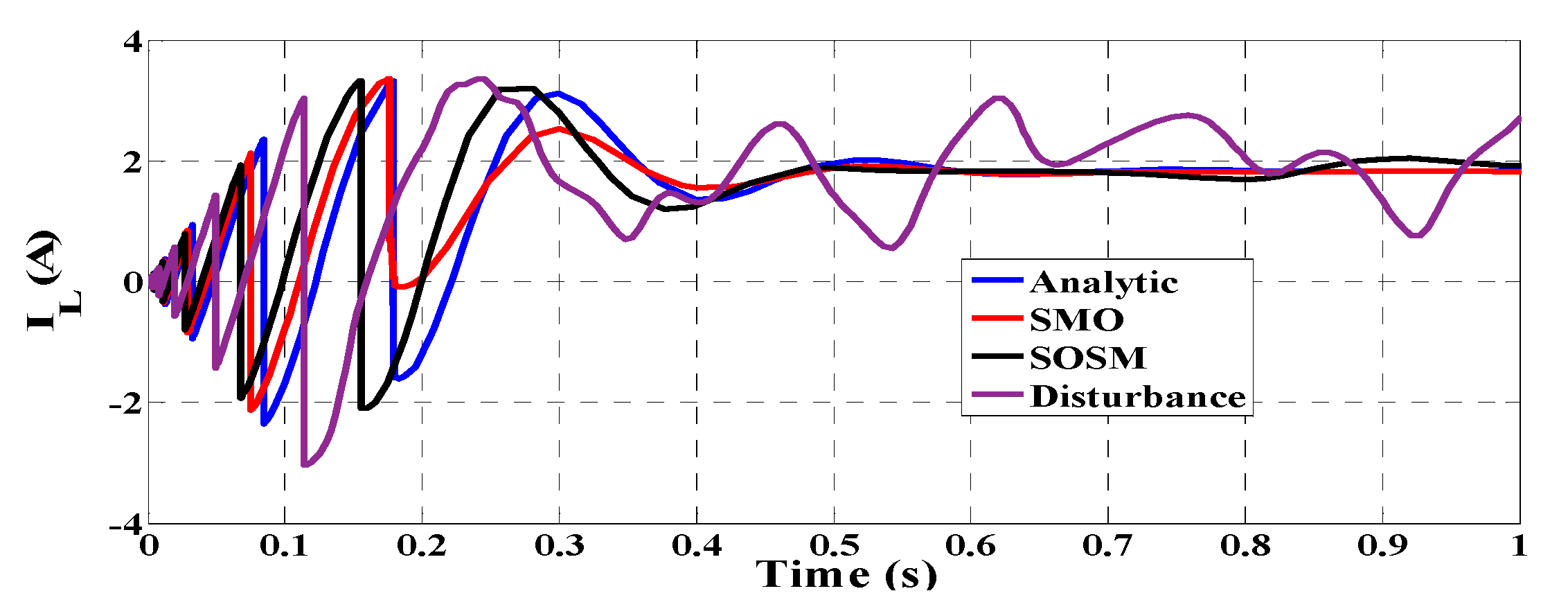
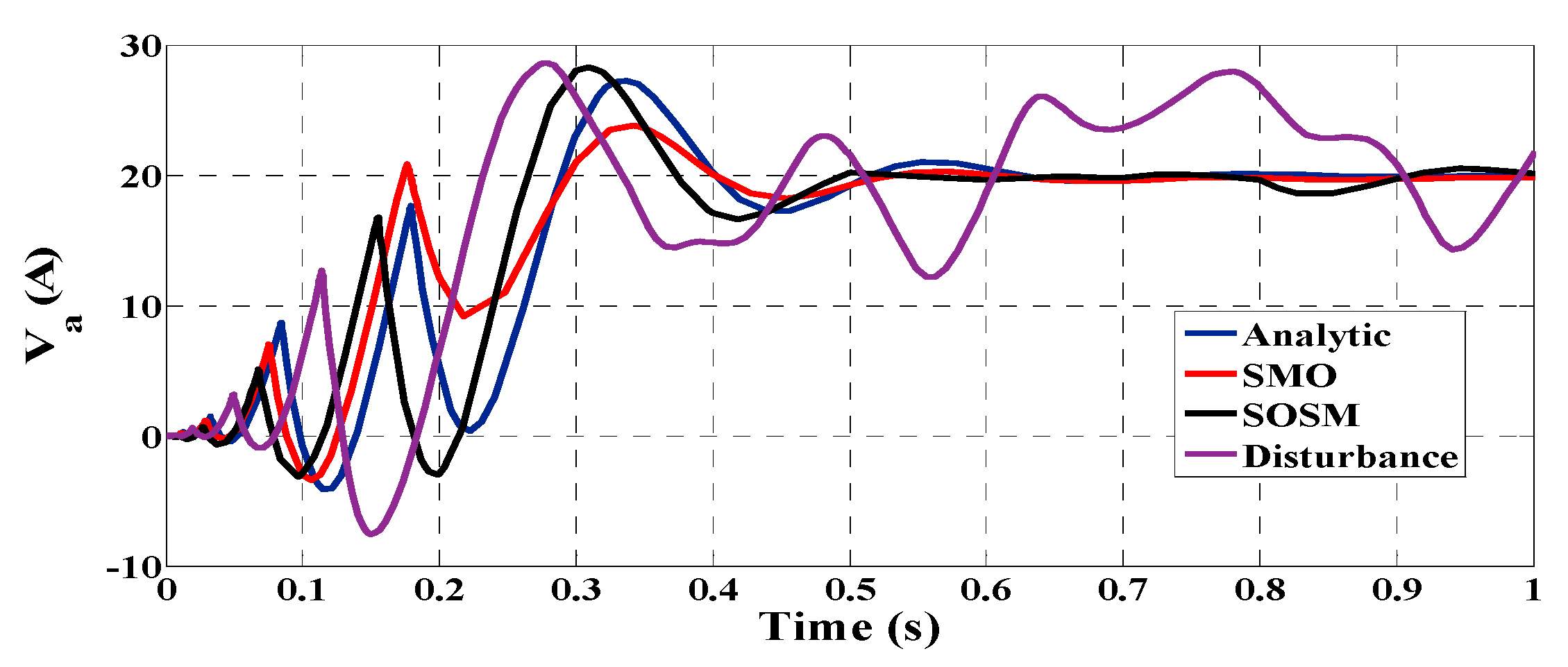
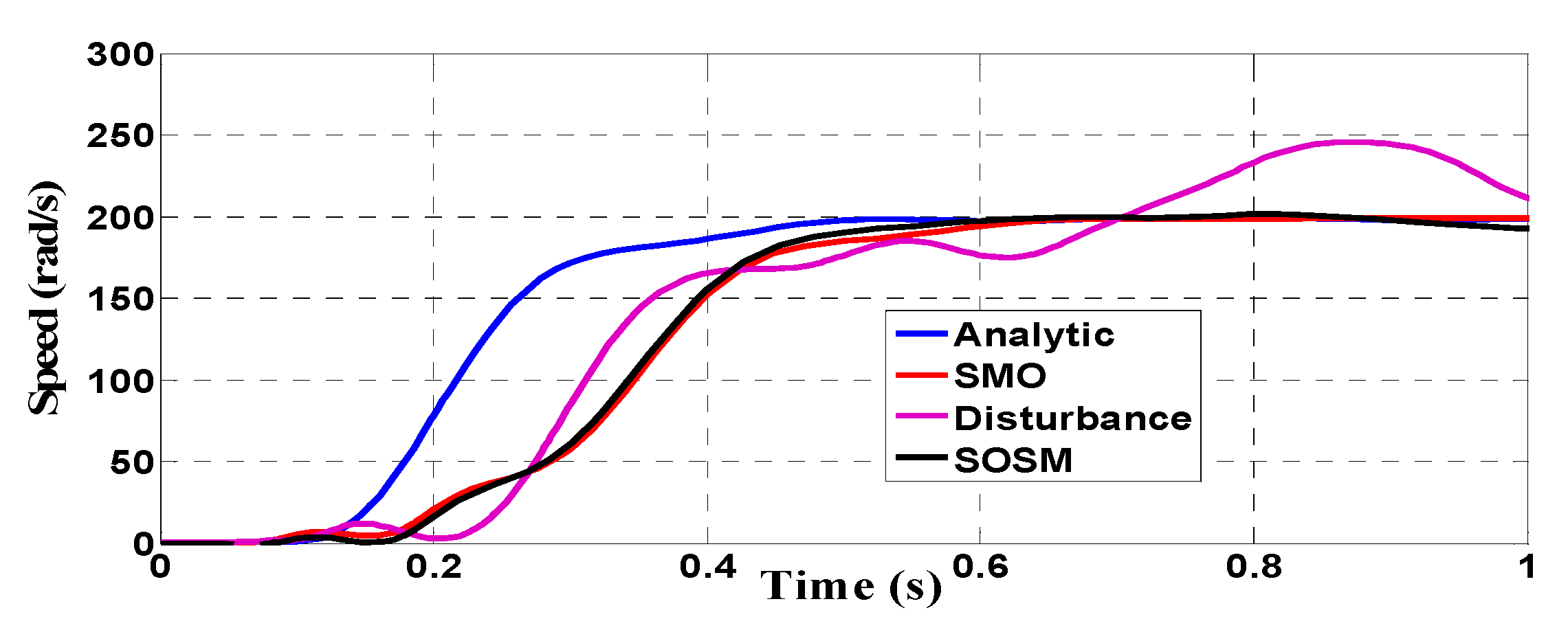
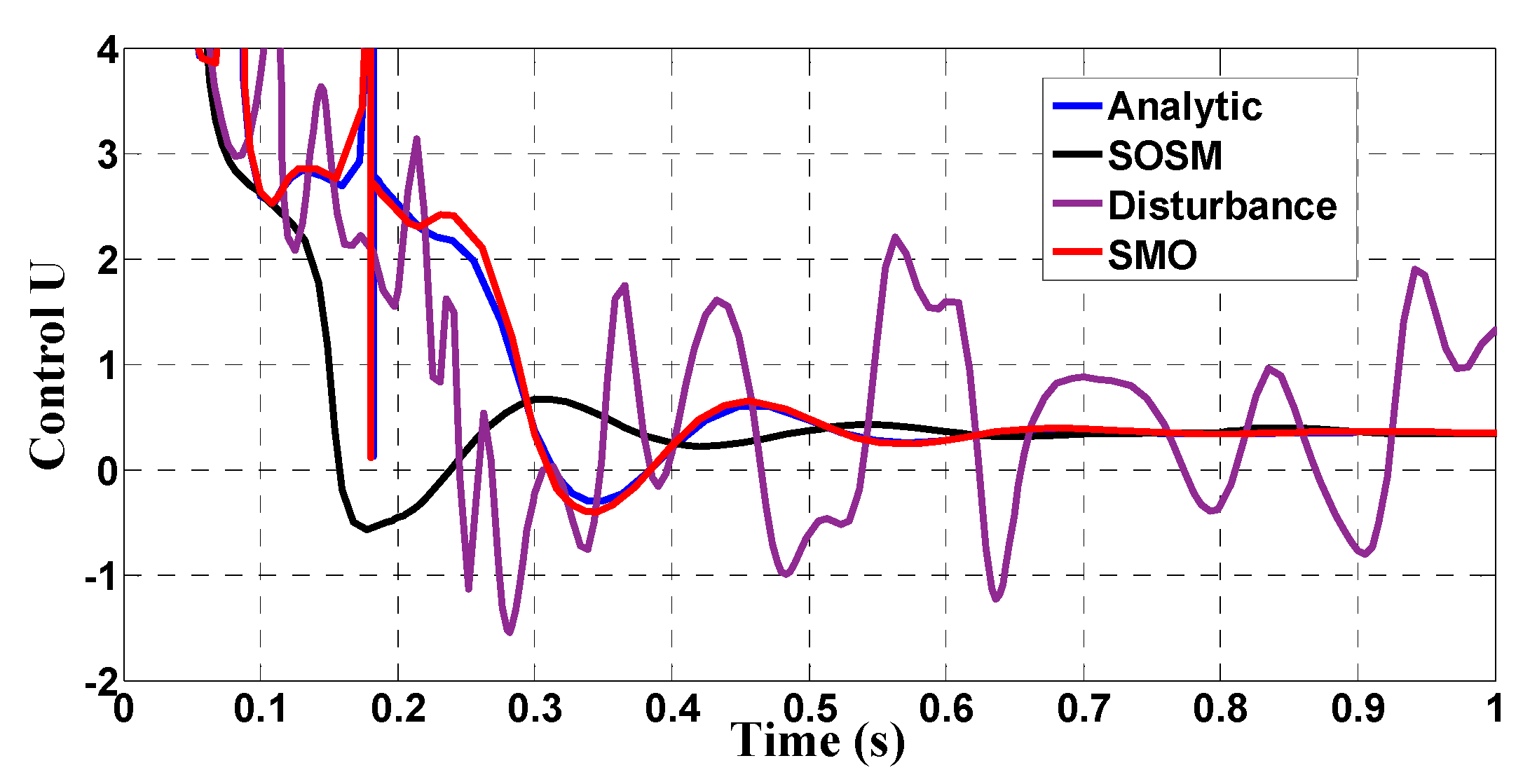
- The designed SMO-SMC-FBL scheme developed in this paper is now compared to fundamental FBL (analytic technique ignoring disturbances), SOSM (analytic second-order sliding mode considering disturbance), and FBL (analytic technique considering disturbances). The results are shown in Figure 19, Figure 20, Figure 21, Figure 22 and Figure 23, from where we detect that the superiority of the SMO technique is obvious. Indeed, the global behavior of the controlled system is stable and accurate.
- (vi)
- Therefore, the steady-state regime is attained in a quite satisfactory way.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rekioua, D.; Matagne, E. Optimization of Photovoltaic Power Systems: Modelization, Simulation and Control; Springer: New York, NY, USA, 2012. [Google Scholar]
- Alfegi, E.M.A.; Sopian, K.; Othman, M.Y.H.; Yatim, B.B. Transient mathematical model of both side single pass photovoltaic thermal air collector. ARPN J. Eng. Appl. Sci. 2007, 2, 22–26. [Google Scholar]
- Xie, W.T.; Dai, Y.J.; Wang, R.Z.; Sumathy, K. Concentrated solar energy applications using Fresnel lenses: A review. Renew. Sustain. Energy Rev. 2011, 15, 2588–2606. [Google Scholar] [CrossRef]
- Mokarram, M.; Mokarram, M.J.; Khosravi, M.R.; Saber, A.; Rahideh, A. Determination of the optimal location for constructing solar photovoltaic farms based on multi-criteria decision system and Dempster–Shafer theory. Sci. Rep. 2020, 10, 8200. [Google Scholar] [CrossRef] [PubMed]
- Fialho, L.; Melício, V.; Mendes, M.D.; Estanqueiro, A.; Collares-Pereira, M. PV systems linked to the grid: Parameter identification with a heuristic procedure. Sust. Energy Technol. Assess. 2015, 10, 29–39. [Google Scholar] [CrossRef] [Green Version]
- Mohamed, N.; Aymen, F.; Ali, Z.M.; Zobaa, A.F.; Aleem, S.H.E.A. Efficient power management strategy of electric vehicles-based hybrid renewable energy. Sustainability 2021, 13, 7351. [Google Scholar] [CrossRef]
- Kim, K.; McKay, R.B.; Hoai, N.X. Recursion-based biases in stochastic grammar model genetic programming. IEEE Trans. Evol. Comp. 2016, 20, 81–95. [Google Scholar] [CrossRef]
- Chaouch, H.; Charfeddine, S.; Aoun, S.B.; Jerbi, H.; Leiva, V. Multiscale monitoring using machine learning methods: New methodology and an industrial application to a photovoltaic system. Mathematics 2022, 10, 890. [Google Scholar] [CrossRef]
- Liu, C.; Luo, Y.; Huang, J.; Liu, Y. A PSO-based MPPT algorithm for photovoltaic systems subject to inhomogeneous insolation. In Proceedings of the 6th International Conference on Soft Computing and Intelligent Systems, and the 13th International Symposium on Advanced Intelligence Systems, Kobe, Japan, 20–24 November 2012; pp. 721–726. [Google Scholar]
- Miyatake, M.; Veerachary, M.; Toriumi, F.; Fujii, N.; Ko, H. Maximum power point tracking of multiple photovoltaic arrays: A PSO approach. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 367–380. [Google Scholar] [CrossRef]
- Fernhndez, B.; Hedrick, K. Control of multivariable nonlinear systems by the sliding mode method. Int. J. Control 1987, 46, 1019–1040. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. Sliding regimes in general nonlinear systems: A relative degree approach. Int. J. Control 1989, 50, 1487–1506. [Google Scholar] [CrossRef]
- Elmali, H.; Olga, N. Robust output tracking control of nonlinear MIMO systems via sliding mode technique. Automatica 1992, 45, 145–151. [Google Scholar] [CrossRef]
- Chiacchiarini, H.; Desages, A.C.; Romagnoli, J.A.; Palazoglu, A. Variable structure control with a second-order sliding condition: Application to a steam generator. Automatica 1995, 31, 1157–1168. [Google Scholar] [CrossRef]
- Charfeddine, S.; Boudjemline, A.; ben Aoun, S.; Jerbi, H.; Kchaou, M.; Alshammari, O.; Elleuch, Z.; Abbassi, R. Design of a fuzzy optimization control optimization control structure for nonlinear systems: A disturbance-rejection method. Appl. Sci. 2021, 11, 2612. [Google Scholar] [CrossRef]
- Han, S.H.; Tran, M.S.; Tran, D.T. Adaptative sliding mode control for a robotic manipulator with unknown friction and unknown control direction. Appl. Sci. 2021, 11, 3919. [Google Scholar] [CrossRef]
- Yen, V.T.; Nan, W.Y.; Van Cuong, P. Robust adaptive sliding mode neural networks control for industrial robot manipulators. Int. J. Control Autom. Syst. 2019, 17, 783–792. [Google Scholar] [CrossRef]
- Askarzadeh, A.; Dos Santos Coelho, L. Determination of photovoltaic modules parameters at different operating conditions using a novel bird mating optimizer approach. Energy Conv. Manag. 2015, 89, 608–614. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Perruquetti, W.; Barbot, J.P. Sliding Mode Control in Engineering; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Roopaei, M.; Jahromi, M.Z. Chattering-free fuzzy sliding mode control in MIMO uncertain systems. Nonlin. Anal. Theory Meth. Appl. 2009, 71, 4430–4437. [Google Scholar] [CrossRef]
- Amer, A.F.; Sallam, E.A.; Elawady, W.M. Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators. Appl. Soft Comput. 2011, 11, 4943–4953. [Google Scholar] [CrossRef]
- Jung, S. Improvement of tracking control of a sliding mode controller for robot manipulators by a neural network. Int. J. Control. Autom. Syst. 2018, 16, 937–943. [Google Scholar] [CrossRef]
- Lv, Z.; Qiao, L.; Cai, K.; Wang, Q. Big data analysis technology for electric vehicle networks in smart Cities. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1807–1816. [Google Scholar] [CrossRef]
- Dizqah, A.M.; Maheri, A.; Busawon, K. An accurate method for the PV model identification based on a genetic algorithm and the interior-point method. Renew. Energy 2014, 72, 212–222. [Google Scholar] [CrossRef] [Green Version]
- Le, Q.D.; Kang, H.J. Finite-time fault-tolerant control for a robot manipulator based on synchronous terminal sliding mode control. Appl. Sci. 2020, 10, 2998. [Google Scholar] [CrossRef]
- Lee, J.; Chang, P.H.; Jin, M. Adaptive integral sliding mode control with time-delay estimation for robot manipulators. IEEE Trans. Ind. Electron. 2017, 64, 6796–6804. [Google Scholar] [CrossRef]
- Charfeddine, S.; Jerbi, H. Trajectory tracking and disturbance rejection for nonlinear periodic process: A gains scheduling design. Iremos 2012, 5, 1075–1083. [Google Scholar]
- Charfeddine, S.; Jerbi, H. A survey of nonlinear gain scheduling design control of continuous and discrete time systems. Intern. J. Model. Ident. Control 2013, 19, 203–216. [Google Scholar] [CrossRef]
- Charfeddine, S.; Jerbi, H.; Sbita, L. Nonlinear discrete–time gain scheduling control for affine nonlinear polynomial systems. Iremos 2013, 6, 1031–1041. [Google Scholar]
- Chaouech, H.; Charfeddine, S.; Ouni, K.; Jerbi, H.; Nabli, L. Intelligent supervision approach based on multilayer neural PCA and nonlinear gain scheduling. Neur. Comp. App. 2019, 31, 1153–1163. [Google Scholar] [CrossRef]
- Charfeddine, S.; Jerbi, H. Benchmarking of analytical and advanced nonlinear tracking approaches. J. Eng. Res. 2021, 9, 250–267. [Google Scholar] [CrossRef]
- Charfeddine, S.; Jerbi, H. The use of a heuristic optimization method to improve the design of a discrete-time gain scheduling control. Intern. J. Control Aut. Syst. 2021, 19, 1836–1846. [Google Scholar]
- Cheng, M.X.; Jiao, X.H. Observer-based adaptive l2 disturbance attenuation control of semi-active suspension with MR damper. Asian J. Control 2017, 19, 346–355. [Google Scholar] [CrossRef]
- Gao, F.; Wu, M.; She, J.; Cao, W. Active disturbance rejection in affine nonlinear systems based on equivalent-input disturbance approach. Asian J. Control 2017, 19, 1767–1776. [Google Scholar]
- Kayacan, E.; Peschel, J.M.; Chowdhary, G. A self-learning disturbance observer for nonlinear systems in feedback-error learning scheme. Eng. Appl. Artif. Intell. 2017, 62, 276–285. [Google Scholar] [CrossRef] [Green Version]
- Sun, T.; Zhang, J.; Pan, Y. Active disturbance rejection control of surface vessels using composite error updated extended state observer. Asian J. Control 2017, 19, 1802–1811. [Google Scholar]
- Andoulsi, R.; Mami, A.; Dauphin-Tanguy, G.; Annabi, M. Modelling and simulation by bond graph technique of a DC motor fed from a photovoltaic source via MPPT boost converter. Proc. CSSC 1999, 99, 4181–4187. [Google Scholar]
- Andoulssi, R.; Draou, A.; Jerbi, H. Nonlinear control of a photovoltaic water pumping system. Energy Proc. 2013, 42, 328–336. [Google Scholar] [CrossRef] [Green Version]
- Abbassi, R.; Boudjemline, A. A numerical-analytical hybrid approach for the identification of SDM solar cell unknown parameters. Eng. Technol. App. Sci. Res. 2018, 8, 2907–2913. [Google Scholar] [CrossRef]
- Manar, M.; Hegazy, R.; Mokhtar, A.; Emad, M.A. A new strategy based on slime mould algorithm to extract the optimal model parameters of solar PV panel. Sust. Energy Technol. Assess. 2020, 42, 100849. [Google Scholar]
- Yeh, W.C.; Huang, C.L.; Lin, P.; Chen, Z.; Jiang, Y.; Sun, B. Simplex simplified swarm optimization for the efficient optimization of parameter identification for solar cell models. IET Renew. Power. Gen. 2018, 51, 45. [Google Scholar] [CrossRef]
- Nunes, H.; Pombo, J.; Bento, P.; Mariano, S.; Calado, M. Collaborative swarm intelligence to estimate PV parameters. Energy Conv. Manag. 2019, 90, 185–866. [Google Scholar] [CrossRef]
- Ebrahimi, S.M.; Salahshour, E.; Malekzadeh, M.; Gordillo, F. Parameters identification of PV solar cells and modules using flexible particle swarm optimization algorithm. Energy 2019, 72, 358. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Wang, M.; Heidari, A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gen. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Nor, A.K.M.; Pedapati, S.R.; Muhammad, M.; Leiva, V. Overview of explainable artificial intelligence for prognostic and health management of industrial assets based on preferred reporting items for systematic reviews and meta-analyses. Sensors 2021, 21, 8020. [Google Scholar] [CrossRef] [PubMed]
- Govind, V.; Sumika, C.; Manpreet, S.; Rajesh, K. Bearing defect identification by swarm decomposition considering permutation entropy measure and opposition-based slime mould algorithm. Measurement 2021, 178, 109389. [Google Scholar]
- Palacios, C.A.; Reyes-Suarez, J.A.; Bearzotti, L.A.; Leiva, V.; Marchant, C. Knowledge discovery for higher education student retention based on data mining: Machine learning algorithms and case study in Chile. Entropy 2021, 23, 485. [Google Scholar] [CrossRef] [PubMed]
- Apostolidis, G.K.; Hadjileontiadis, L.J. Swarm decomposition: A novel signal analysis using swarm intelligence. Signal Proc. 2017, 132, 40–50. [Google Scholar] [CrossRef]
- Mahdi, E.; Leiva, V.; Mara’Beh, S.; Martin-Barreiro, C. A new approach to predicting cryptocurrency returns based on the gold prices with support vector machines during the COVID-19 pandemic using sensor-related data. Sensors 2021, 21, 6319. [Google Scholar] [CrossRef] [PubMed]
- Ramirez-Figueroa, J.A.; Martin-Barreiro, C.; Nieto, A.B.; Leiva, V.; Galindo-Villardón, M.P. A new principal component analysis by particle swarm optimization with an environmental application for data science. Stoch. Env. Res. Risk Assess. 2021, 35, 1969–1984. [Google Scholar] [CrossRef]
- Miao, Y.; Zhao, M.; Makis, V.; Lin, J. Optimal swarm decomposition with whale optimization algorithm for weak feature extraction from multicomponent modulation signal. Mech. Syst. Signal Process. 2019, 122, 673–691. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
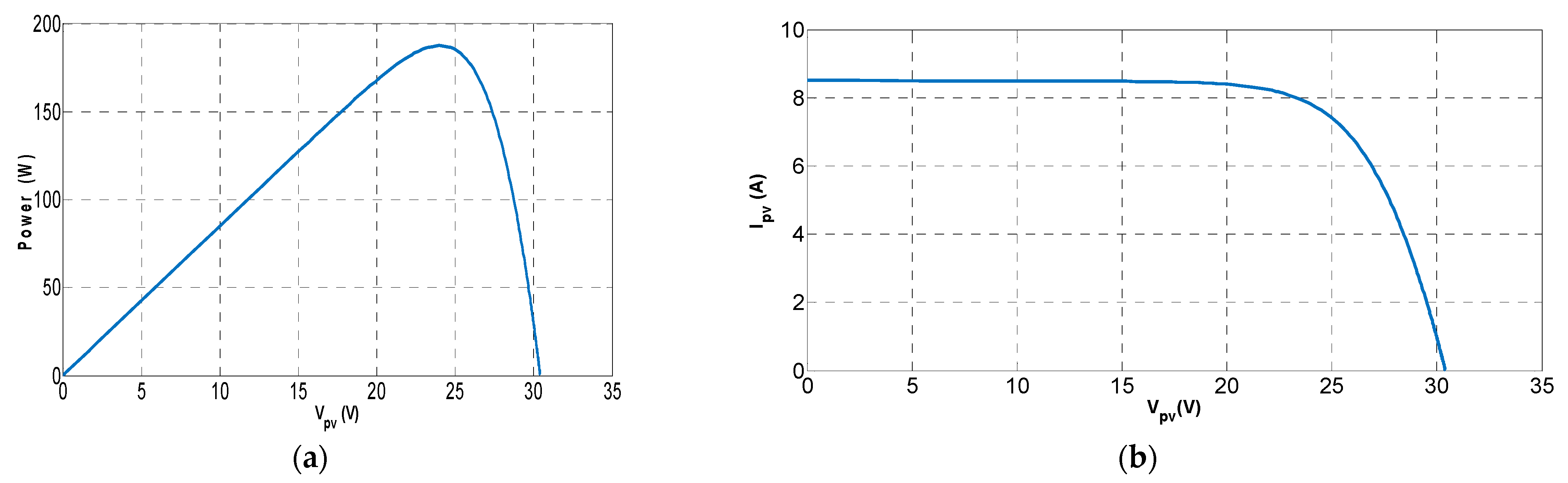
| Description | Parameter |
|---|---|
| Power at the maximum power point () | |
| Voltage at the maximum power point () | |
| Current at the maximum power point () | 7.82 A |
| Open-circuit voltage () | 30.6 V |
| Short-circuit current () | 8.5 A |
| Number of cells per module | 50 |
| Description | Values |
|---|---|
| PV generator | |
| Capacitor | |
| The identified parameters of the DC motor |
| Parameters | Values |
|---|---|
| to 1 | |
| 1 to 0 |
| Time Slot | (8–9 h) | (9–10 h) | (10–11 h) | (11–14 h) | (14–15 h) | (15–16 h) |
|---|---|---|---|---|---|---|
| I/O FBL control | 10.50 | 10.15 | 9.34 | 8.00 | 10.01 | 11.00 |
| Decoupling I/O FBL | 10.33 | 9.89 | 9.22 | 8.75 | 8.63 | 8.10 |
| SOSM control | 8.00 | 7.74 | 7.10 | 6.68 | 7.00 | 7.50 |
| SMO control | 4.35 | 3.56 | 3.00 | 2.88 | 3.45 | 3.72 |
| Time Slot | (8–9 h) | (9–10 h) | (10–11 h) | (11–14 h) | (14–15 h) | (15–16 h) |
|---|---|---|---|---|---|---|
| I/O FBL control | 11.75 | 10.12 | 9.94 | 9.01 | 8.51 | 7.20 |
| Decoupling I/O FBL | 20.23 | 19.91 | 19.45 | 18.17 | 17.263 | 16.51 |
| SOSM control | 17.00 | 15.84 | 13.123 | 11.361 | 9.97 | 8.85 |
| SMO control | 10 | 9.01 | 8.2 | 6.075 | 4.97 | 3.762 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Charfeddine, S.; Alharbi, H.; Jerbi, H.; Kchaou, M.; Abbassi, R.; Leiva, V. A Stochastic Optimization Algorithm to Enhance Controllers of Photovoltaic Systems. Mathematics 2022, 10, 2128. https://doi.org/10.3390/math10122128
Charfeddine S, Alharbi H, Jerbi H, Kchaou M, Abbassi R, Leiva V. A Stochastic Optimization Algorithm to Enhance Controllers of Photovoltaic Systems. Mathematics. 2022; 10(12):2128. https://doi.org/10.3390/math10122128
Chicago/Turabian StyleCharfeddine, Samia, Hadeel Alharbi, Houssem Jerbi, Mourad Kchaou, Rabeh Abbassi, and Víctor Leiva. 2022. "A Stochastic Optimization Algorithm to Enhance Controllers of Photovoltaic Systems" Mathematics 10, no. 12: 2128. https://doi.org/10.3390/math10122128
APA StyleCharfeddine, S., Alharbi, H., Jerbi, H., Kchaou, M., Abbassi, R., & Leiva, V. (2022). A Stochastic Optimization Algorithm to Enhance Controllers of Photovoltaic Systems. Mathematics, 10(12), 2128. https://doi.org/10.3390/math10122128