
Barrier Function-Based Nonsingular Finite-Time Tracker for Quadrotor UAVs Subject to Uncertainties and Input Constraints

 ,
,  , ,
, ,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The design of a novel compensator for quadrotor UAVs subject to model uncertainties and input saturation;
- The proposition of a non-singular terminal siding surface that yields fast reachability of the sliding surface, which is defined based on the tracking errors and virtual control inputs;
- Employment of the barrier-function technique for the accurate estimation of the unknown upper bounds of model uncertainties.
2. Presentation of the Model of a Quadrotor
3. Main Results
3.1. Compensation System
3.2. Tracking Errors and Sliding Surface
3.3. Nonsingular Terminal Sliding Mode Control
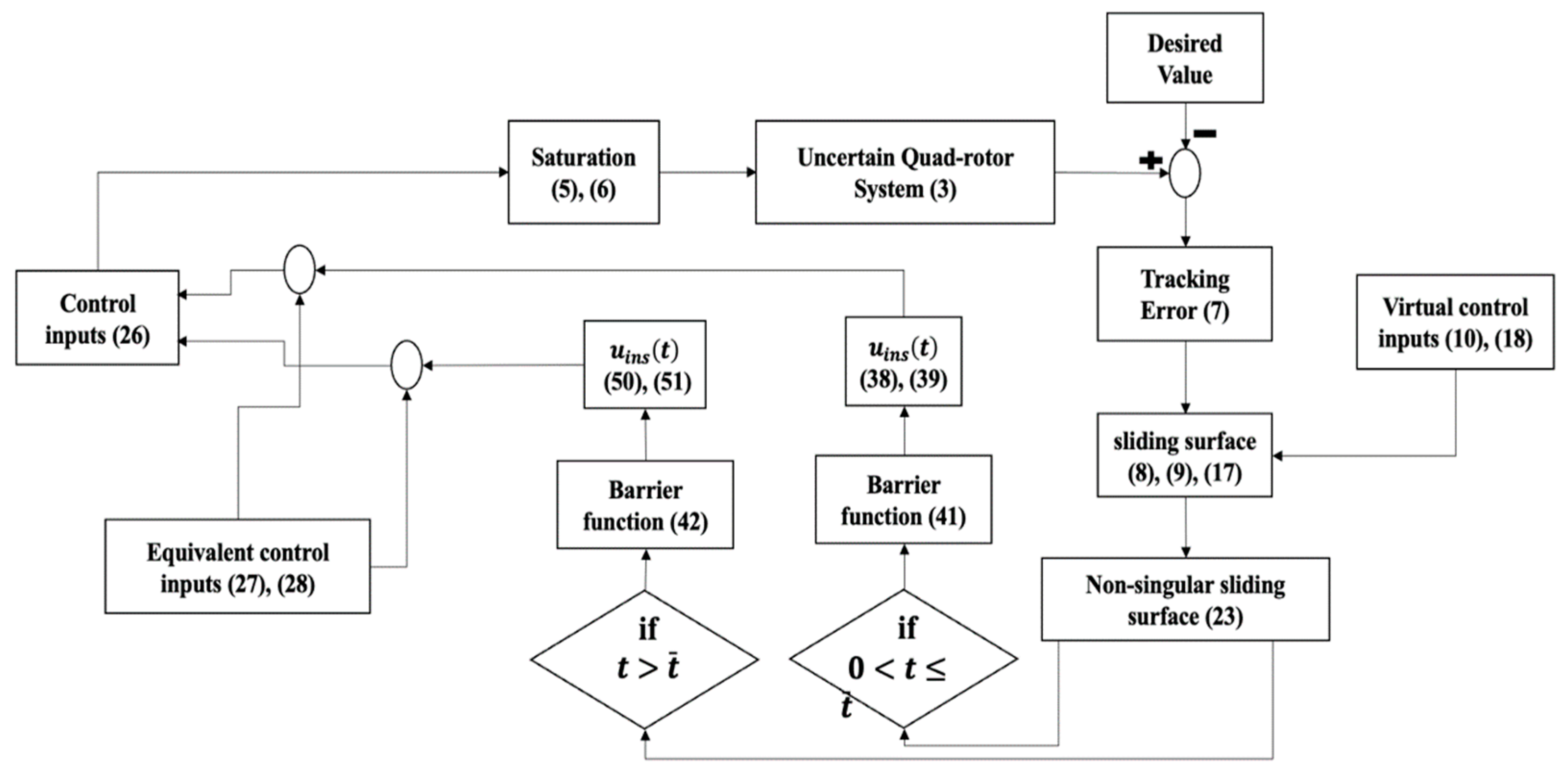
3.4. Barrier Function Based-Nonsingular Terminal Sliding Mode Control
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, X.; Yu, Y.; Sun, C.-Y. A decoupling control for quadrotor UAV using dynamic surface control and sliding mode disturbance observer. Nonlinear Dyn. 2019, 97, 781–795. [Google Scholar] [CrossRef]
- Wang, X.; Yu, Y.; Li, Z. Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints. Int. J. Robust Nonlinear Control. 2021, 31, 2110–2125. [Google Scholar] [CrossRef]
- Dai, M.; Su, Z.; Xu, Q.; Zhang, N. Vehicle assisted computing offloading for unmanned aerial vehicles in smart city. IEEE Trans. Intell. Trans. Syst. 2021, 22, 1932–1944. [Google Scholar] [CrossRef]
- Zhao, Z.; Cao, D.; Yang, J.; Wang, H. High-order sliding mode observer-based trajectory tracking control for a quadrotor UAV with uncertain dynamics. Nonlinear Dyn. 2020, 102, 2583–2596. [Google Scholar] [CrossRef]
- Lyu, Z.; Wang, Z.; Duan, D.; Lin, L.; Li, J.; Yang, Y.; Chen, Y.; Li, Y. Tilting path optimization of tilt quad rotor in conversion process based on ant colony optimization algorithm. IEEE Access 2020, 8, 140777–140791. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, Z.; Deng, C.; Wen, B. Adaptive fuzzy global sliding mode control for trajectory tracking of quadrotor UAVs. Nonlinear Dyn. 2019, 97, 609–627. [Google Scholar] [CrossRef]
- Ibarra-Jimenez, E.; Castillo, P.; Abaunza, H. Nonlinear control with integral sliding properties for circular aerial robot trajectory tracking: Real-time validation. Int. J. Robust Nonlinear Control. 2020, 30, 609–635. [Google Scholar] [CrossRef]
- Du, H.; Yu, B.; Wei, J.; Zhang, J.; Wu, D.; Tao, W. Attitude trajectory planning and attitude control for quad-rotor aircraft based on finite-time control technique. Appl. Math. Comput. 2020, 386, 125493. [Google Scholar] [CrossRef]
- Zhou, J.; Cheng, Y.; Du, H.; Wu, D.; Zhu, M.; Lin, X. Active finite-time disturbance rejection control for attitude tracking of quad-rotor under input saturation. J. Frankl. Instit. 2020, 357, 11153–11170. [Google Scholar] [CrossRef]
- Okyere, E.; Bousbaine, A.; Poyi, G.T.; Joseph, A.K.; Andrade, J.M. LQR controller design for quad-rotor helicopters. J. Eng. 2019, 2019, 4003–4007. [Google Scholar] [CrossRef]
- Rahmat, M.F.; Eltayeb, A.; Basri, M.A.M. Adaptive feedback linearization controller for stabilization of quadrotor UAV. Int. J. Integr. Eng. 2020, 12, 1–17. [Google Scholar]
- Ríos, H.; González-Sierra, J.; Dzul, A. Robust tracking output-control for a quad-rotor: A continuous sliding-mode approach. J. Frankl. Instit. 2017, 354, 6672–6691. [Google Scholar] [CrossRef]
- Han, Y.-Z.; Hua, R. RBF Neural Network Adaptive Sliding Mode Control for Quad-rotor Aerial Vehicle. Electron. Opt. Control 2017, 10956, 11. [Google Scholar]
- Zheng, E.; Xiong, J. Quad-rotor unmanned helicopter control via novel robust terminal sliding mode controller and under-actuated system sliding mode controller. Optik 2014, 125, 2817–2825. [Google Scholar] [CrossRef]
- Zhou, S.; Guo, K.; Yu, X.; Guo, L.; Xie, L. Fixed-time Observer Based Safety Control for a Quadrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2815–2825. [Google Scholar] [CrossRef]
- He, D.; Wang, H.; Tian, Y. Model-Free Control Using Nonlinear Extended State Observer and Non-singular Fast Terminal Sliding Mode for Quadrotor Position and Attitude. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 1891–1896. [Google Scholar]
- Chen, D.; Lu, T.; Liu, X.; Yu, W. Finite-time consensus of multiagent systems with input saturation and disturbance. Int. J. Robust Nonlinear Control. 2021, 31, 2097–2109. [Google Scholar] [CrossRef]
- Dou, L.; Su, X.; Zhao, X.; Zong, Q.; He, L. Robust tracking control of quadrotor via on-policy adaptive dynamic programming. Int. J. Robust Nonlinear Control. 2021, 31, 2509–2525. [Google Scholar] [CrossRef]
- Sun, Z.; Xie, H.; Zheng, J.; Man, Z.; He, D. Path-following control of mecanum-wheels omnidirectional mobile robots using nonsingular terminal sliding mode. Mech. Syst. Signal Process. 2021, 147, 107128. [Google Scholar] [CrossRef]
- Shao, X.; Sun, G.; Xue, C.; Li, X. Nonsingular terminal sliding mode control for free-floating space manipulator with disturbance. Acta Astronaut. 2021, 181, 396–404. [Google Scholar] [CrossRef]
- Xu, Y.; Tong, C.; Li, H. Flight control of a quadrotor under model uncertainties. Int. J. Micro Air Veh. 2015, 7, 1–19. [Google Scholar] [CrossRef]
- Shi, Y.; Zhou, J. Coherence control of directional nonlinear photocurrent in spatially symmetric systems. Phys. Rev. B 2021, 104, 155146. [Google Scholar] [CrossRef]
- Liu, M.; Lam, J.; Zhu, B.; Kwok, K.-W. On positive realness, negative imaginariness, and H∞ control of state-space symmetric systems. Automatica 2019, 101, 190–196. [Google Scholar] [CrossRef]
- Coll, C.; Herrero, A.; Sánchez, E.; Thome, N. Output feedback stabilization for symmetric control systems. J. Frankl. Instit. 2005, 342, 814–823. [Google Scholar] [CrossRef]
- Obeid, H.; Fridman, L.M.; Laghrouche, S.; Harmouche, M. Barrier function-based adaptive sliding mode control. Automatica 2018, 93, 540–544. [Google Scholar] [CrossRef]
- Laghrouche, S.; Harmouche, M.; Chitour, Y.; Obeid, H.; Fridman, L.M. Barrier function-based adaptive higher order sliding mode controllers. Automatica 2021, 123, 109355. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Zhu, Z.H. Adaptive learning observer for spacecraft attitude control with actuator fault. Aerosp. Sci. Technol. 2021, 108, 106389. [Google Scholar] [CrossRef]
- Hou, Z.; Lu, P.; Tu, Z. Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerosp. Sci. Technol. 2020, 98, 105716. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef]
- Hua, C.-C.; Wang, K.; Chen, J.-N.; You, X. Tracking differentiator and extended state observer-based nonsingular fast terminal sliding mode attitude control for a quadrotor. Nonlinear Dyn. 2018, 94, 343–354. [Google Scholar] [CrossRef]
- Wang, X.; van Kampen, E.-J.; Chu, Q. Quadrotor fault-tolerant incremental nonsingular terminal sliding mode control. Aerosp. Sci. Technol. 2019, 95, 105514. [Google Scholar] [CrossRef]
- Hassani, H.; Mansouri, A.; Ahaitouf, A. Robust autonomous flight for quadrotor UAV based on adaptive nonsingular fast terminal sliding mode control. Int. J. Dyn. Control. 2020, 9, 1–17. [Google Scholar] [CrossRef]
- Zhao, G.; Chen, G.; Chen, J.; Hua, C. Finite-time control for image-based visual servoing of a quadrotor using nonsingular fast terminal sliding mode. Int. J. Control. Autom.Syst. 2020, 18, 2337–2348. [Google Scholar] [CrossRef]
- Modirrousta, A.; Khodabandeh, M. Adaptive non-singular terminal sliding mode controller: New design for full control of the quadrotor with external disturbances. Trans. Instit. Meas. Control. 2017, 39, 371–383. [Google Scholar] [CrossRef]
- Gai, W.; Zhou, Y.; Zhong, M.; Sheng, C.; Zhang, J. Simple Adaptive Control with an Adaptive Anti-Windup Compensator for the Unmanned Aerial Vehicle Attitude Control. IEEE Access 2020, 8, 52323–52332. [Google Scholar] [CrossRef]
- Nguyen, T.-M.; Qiu, Z.; Cao, M.; Nguyen, T.H.; Xie, L. Single landmark distance-based navigation. IEEE Trans. Control. Syst. Technol. 2019, 28, 2021–2028. [Google Scholar] [CrossRef]
- Yu, Z.; Liu, Z.; Zhang, Y.; Qu, Y.; Su, C.-Y. Distributed finite-time fault-tolerant containment control for multiple unmanned aerial vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 2077–2091. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control. ISA Trans. 2021, 123, 455–471. [Google Scholar] [CrossRef]
- Zhan, Y.; Sui, S.; Tong, S. Adaptive fuzzy decentralised control for fractional-order interconnected nonlinear systems with input saturation. Int. J. Syst. Sci. 2021, 52, 1–15. [Google Scholar] [CrossRef]
- Afshari, M.; Mobayen, S.; Hajmohammadi, R.; Baleanu, D. Global sliding mode control via linear matrix inequality approach for uncertain chaotic systems with input nonlinearities and multiple delays. J. Comput. Nonlinear Dyn. 2018, 13, 031008. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alattas, K.A.; Vu, M.T.; Mofid, O.; El-Sousy, F.F.M.; Fekih, A.; Mobayen, S. Barrier Function-Based Nonsingular Finite-Time Tracker for Quadrotor UAVs Subject to Uncertainties and Input Constraints. Mathematics 2022, 10, 1659. https://doi.org/10.3390/math10101659
Alattas KA, Vu MT, Mofid O, El-Sousy FFM, Fekih A, Mobayen S. Barrier Function-Based Nonsingular Finite-Time Tracker for Quadrotor UAVs Subject to Uncertainties and Input Constraints. Mathematics. 2022; 10(10):1659. https://doi.org/10.3390/math10101659
Chicago/Turabian StyleAlattas, Khalid A., Mai The Vu, Omid Mofid, Fayez F. M. El-Sousy, Afef Fekih, and Saleh Mobayen. 2022. "Barrier Function-Based Nonsingular Finite-Time Tracker for Quadrotor UAVs Subject to Uncertainties and Input Constraints" Mathematics 10, no. 10: 1659. https://doi.org/10.3390/math10101659
APA StyleAlattas, K. A., Vu, M. T., Mofid, O., El-Sousy, F. F. M., Fekih, A., & Mobayen, S. (2022). Barrier Function-Based Nonsingular Finite-Time Tracker for Quadrotor UAVs Subject to Uncertainties and Input Constraints. Mathematics, 10(10), 1659. https://doi.org/10.3390/math10101659