3.1. Context and Participants
This research took place in two different urban Greek public primary schools in the Eastern Peloponnese. The first case study took place in a primary school that had 220 students, and the second case study took place in a school of approximately 132 students. The students were not individually selected due to the fact that this research aimed to investigate the phenomena and their understanding within their natural class environment. The reason behind the age of the participants (
Table 2) was due to their relative maturity and their previous experience with Scratch programming. The researcher of this work was a full participant as the computer science teacher for both the case studies. Since the researcher/teacher is a full participant of the case studies, it is meaningful to mention some of his relative characteristics. The teacher had 18 years of educational experience in both secondary and primary school educational settings as a computer science teacher. Additionally, he had participated in past national educational robotics competitions, and participated as well in various non-profit out-of-school educational robotics activities for the last 8 years.
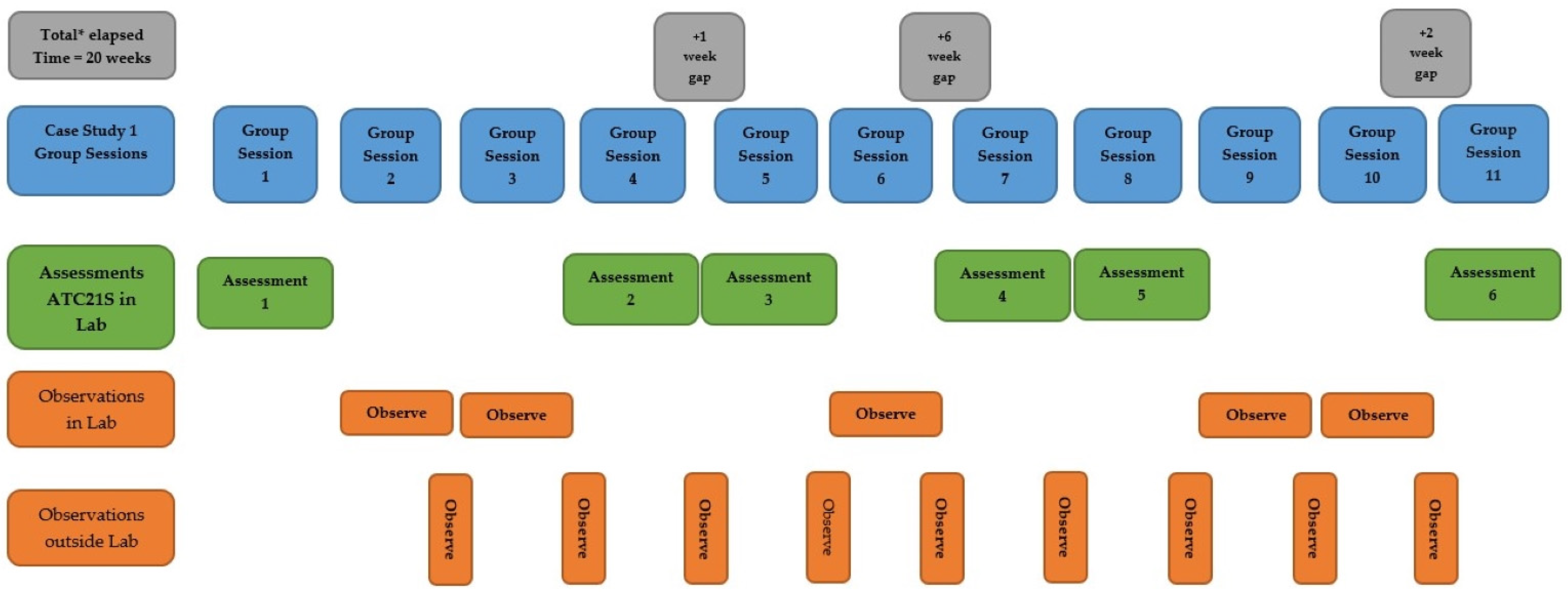
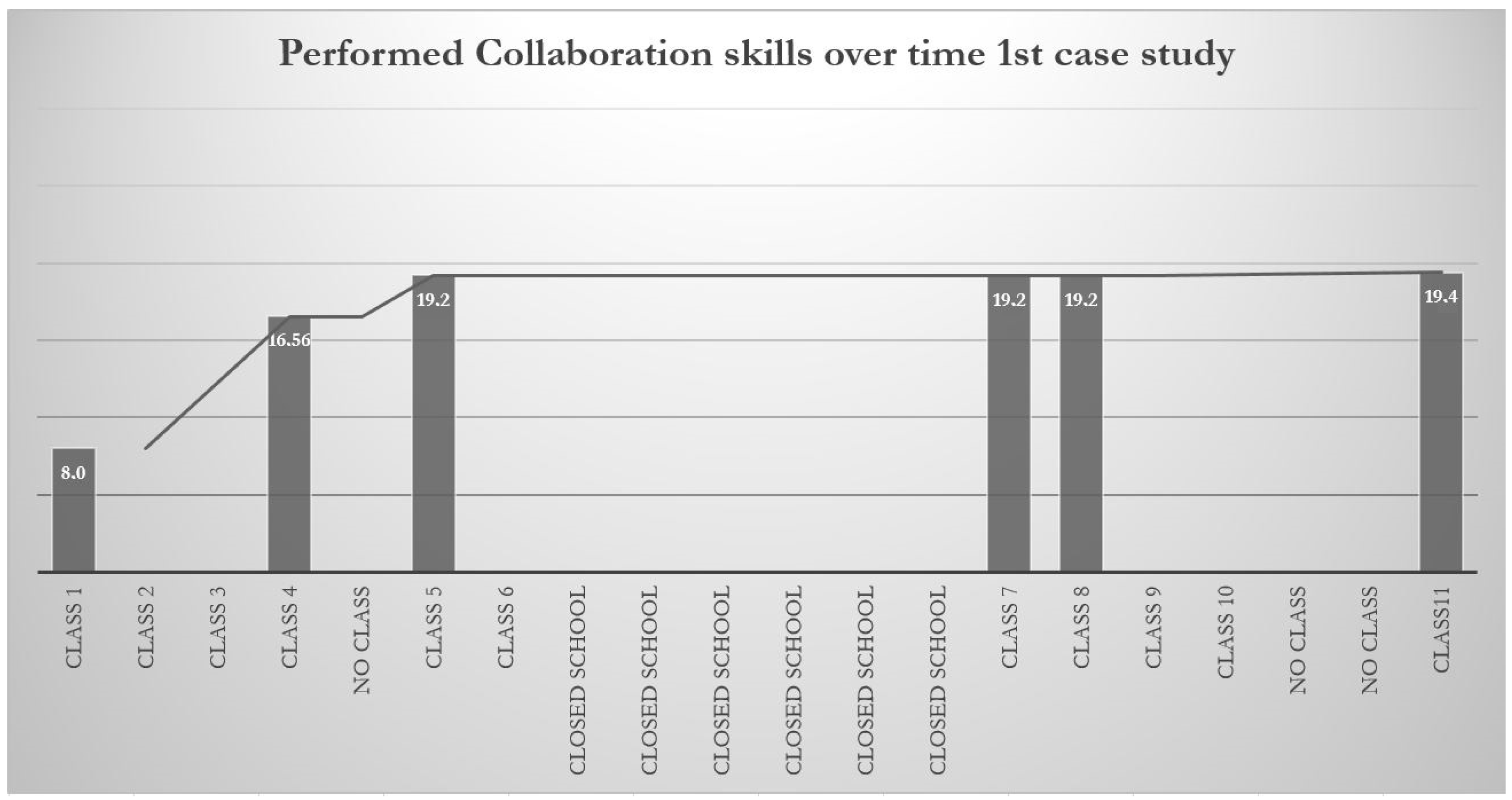
The class that was chosen for the first case study had previous experience with the teacher/researcher. Due to public health restrictions, this case study came to an end suddenly after 13 weeks of work (2 class sessions and 11 lab group work sessions). Therefore, the educational endeavor was not fully completed. However, observations are brought forward and presented in this work.
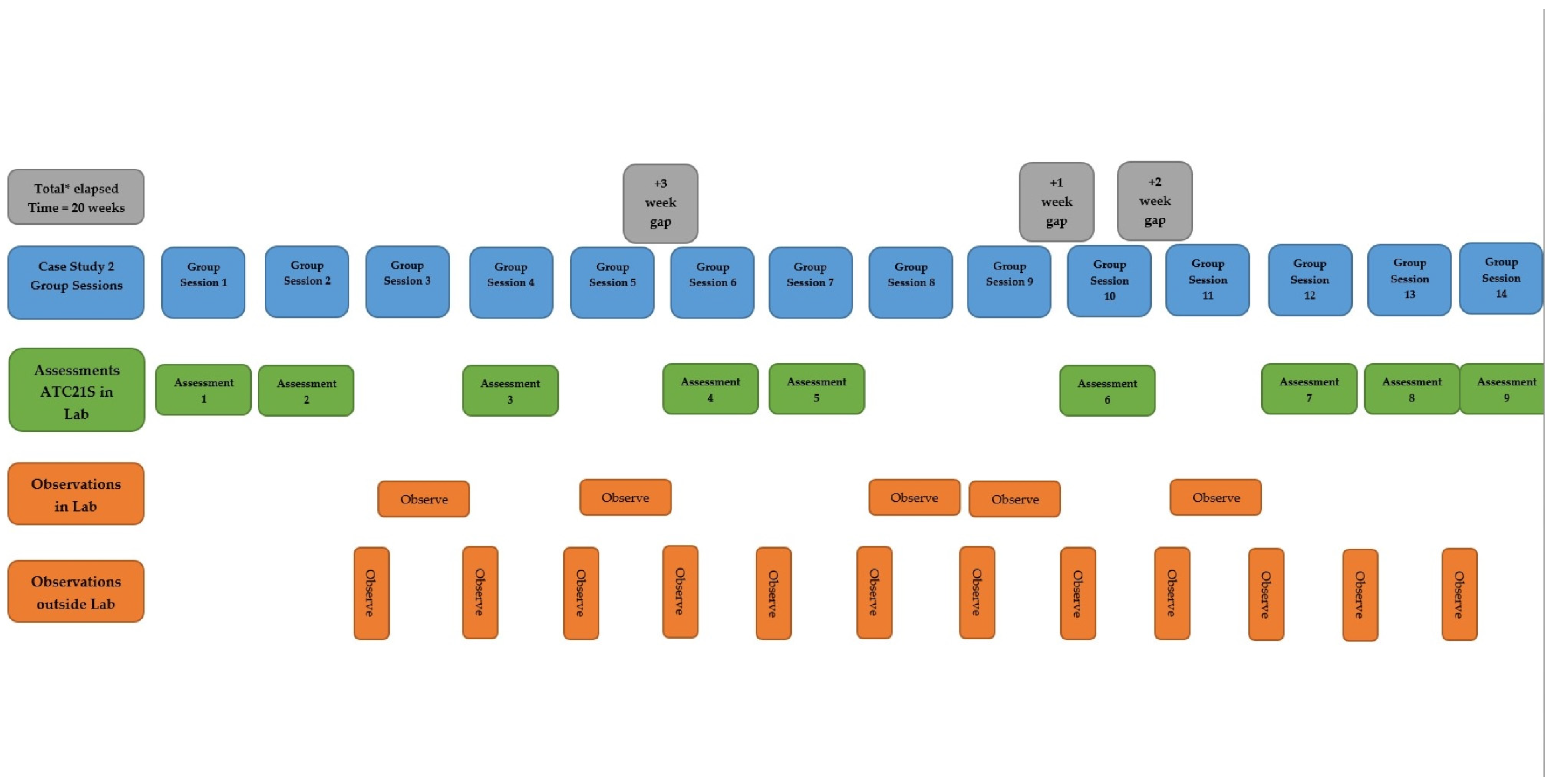
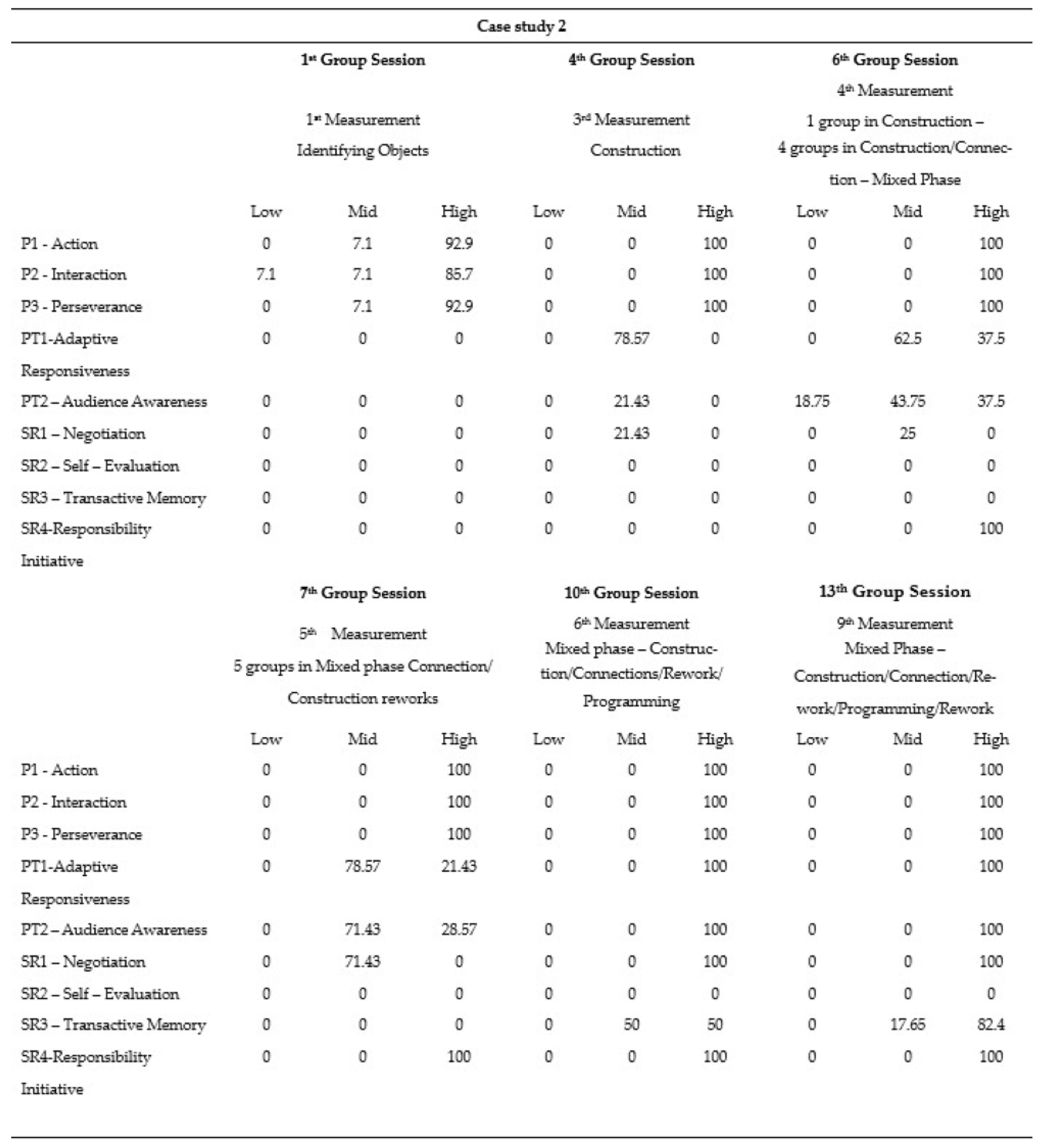
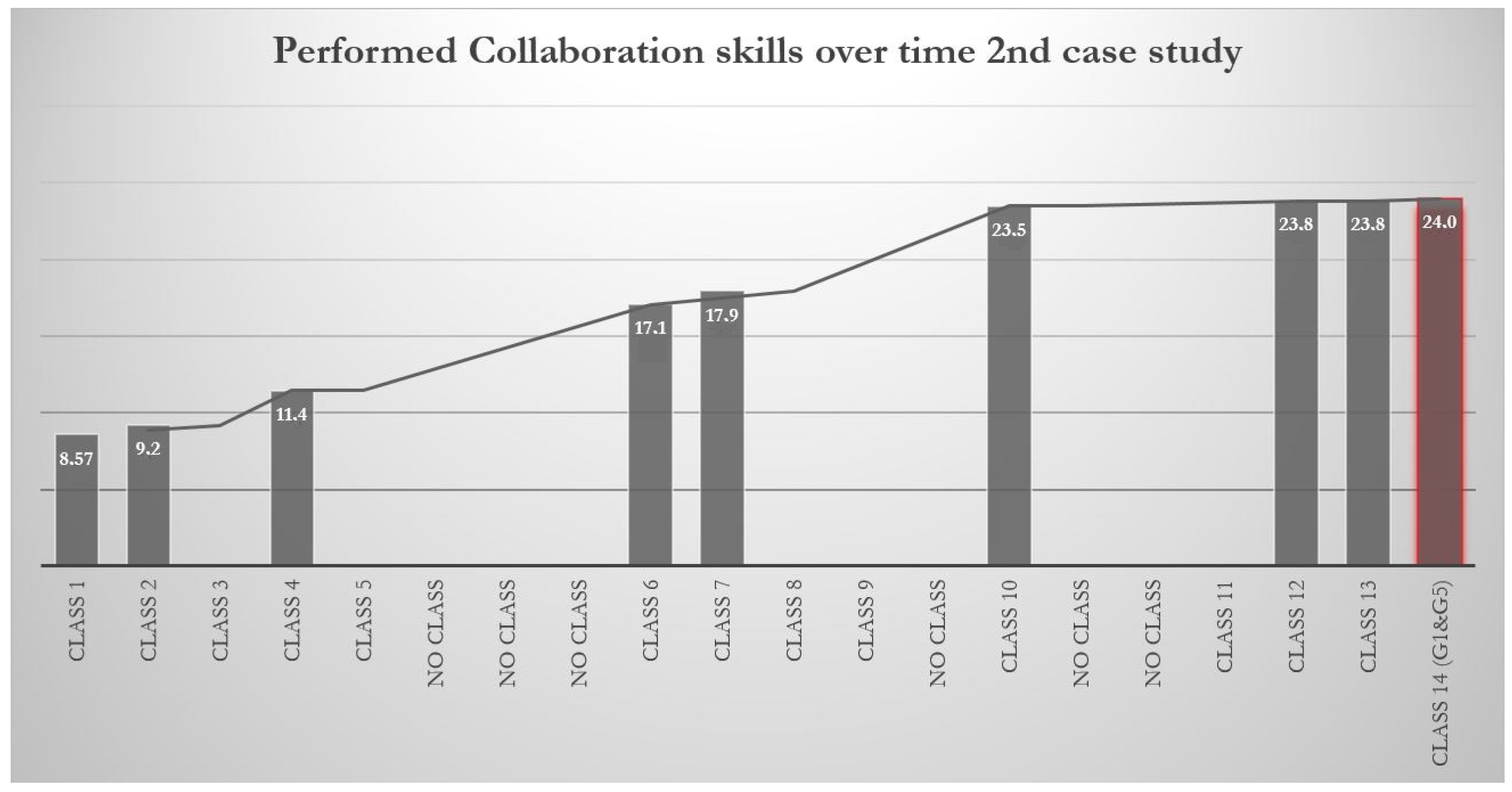
Due to the former relationship of the teacher/researcher with the students of the 1st case study, it was decided to conduct the 2nd case study in a school where the environment and students were unknown to the teacher. The duration of the case study was 16 weeks (2 class sessions and 14 lab group work sessions) and it was completed when all students finished their artifacts.
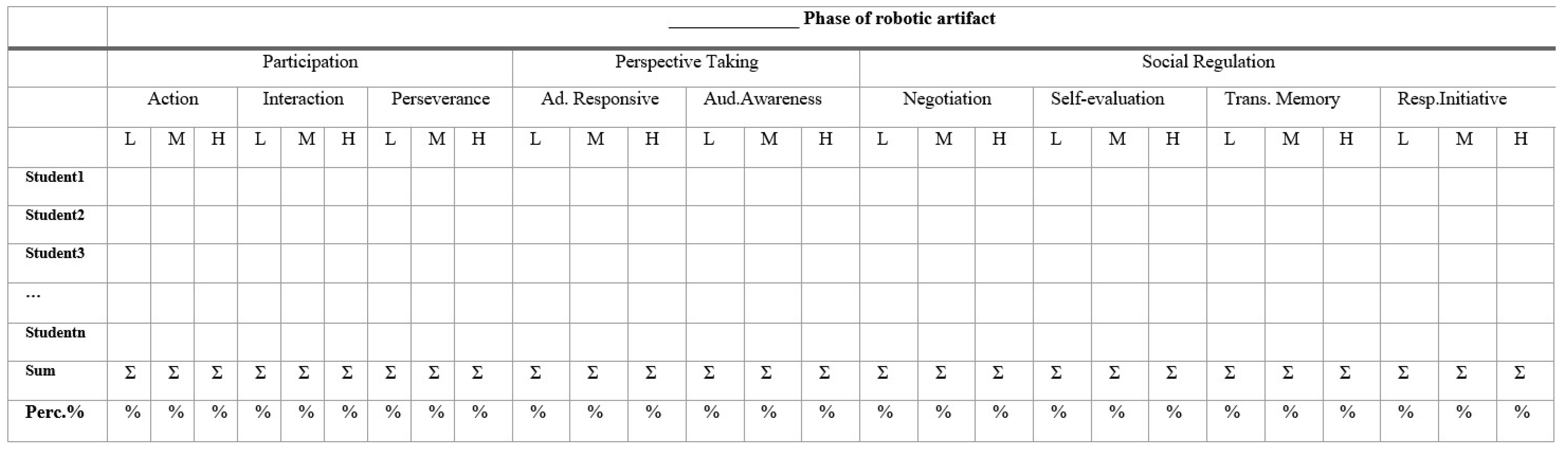
The data collection was conducted within the laboratories of both schools using the observation technique. Due to the fact that collaboration skills present a high level of complexity, it was decided to use both the defined framework of ATC21S for assessing the development of collaboration skills paired with written observations during the group sessions. Additionally, because collaboration skills by their nature are interpersonal, it was also decided to observe the students that participated in the case studies outside the defined context, in the school playground during class breaks. These out of context observations were also written down and brought forward in this work.
The particular E.R kit that was selected for the experiments has elements that are easy by computer science teachers and other educators to be trained on, and is relatively lower in cost than other kits of similar properties. However, not all E.R kits are considered to deliver the same space for exploration in both construction-related aspects and flexibility in using programming languages used in formal school settings.
There are multiple reasons behind selecting the educational robotics kit (Lego WeDo 2) for this research:
Firstly, the playful element is very important for reflecting the appropriate student age. As pinpointed by Scaradozzi et al. [
47], “LEGO Education WeDo provides a hands-on learning experience that actively engages children’s creative thinking, teamwork, and problem-solving skills”. Secondly, the option of manipulating pieces/bricks for assembling artifacts using hubs, motors, and sensors was thought of as complicated enough for students with no prior experience to start with. According to Evans [
4], Dillenbourg [
15], Kuhn [
1], Sears and Reagin [
48], when trying to portray the task prerequisites for collaboration, “Tasks should be sufficiently complex, authentic, novel and ill-illustrated...” The fact that students used the bricks for construction was an important element that was collaboratively capitalized on. More specifically, the elements of synchronicity and symmetry of actions were introduced early in the methodology. After introducing synchronicity and symmetry of actions, the students had the necessary guideline to produce symmetrical initial constructed knowledge on a procedure that did not present any significant prerequisite background, “foundational knowledge”. While constructing new knowledge in a more symmetrical pattern, initial collaboration skills were starting to be developed.
Thirdly, the element of being paired with Bluetooth connectivity with a personal computer instilled a technological factor that is widely used nowadays in modern devices. This element gave the opportunity to capitalize on the fact that the connections presented a hard “foundational” type of knowledge that needed to be completed in order for the artifact to move on to programming. The initial activation/enhancement of the collaboration skills supported this phase because the students had to share a “foundational” type of knowledge. The fact that all the students within each team shared one handbook of detailed instructions on connecting the artifact with the computer gave the opportunity to deepen their collaboration skills. Consequently, equal opportunity for the “foundational” type of knowledge can support the underlying condition of developing symmetrical authority within the teams.
Fourthly, the ability to be connected with the Scratch programming language. The Scratch programming language is widely used in Greek Primary school settings, and students are well accustomed to its use by the age of 11 (6th grade of primary school). According to Stoumpa, Skordoulis and Galani [
49], “Scratch… is addressed to the educational community from primary education to the University”. For the experiments, it was decided that the sophistication of the E.R kit should be enhanced by adding the use of an application such as the s2bot and the Scratch programming language. The s2bot application would enhance the depth of shared knowledge for each group in terms of sensor and motor functionality, while presenting detailed consumption of battery energy as well. These factors pair the new knowledge created during the previous collaborative process with the element of the background “foundational” type of knowledge (Scratch programming).
Additionally, relating to knowledge creation, the element of construction supported a more “symmetrical” start towards knowledge creation, and it was not perceived as an activity that was exclusive to students that are considered “stronger” in programming. The element of construction can potentially draw the interest of a wider set of students within the classrooms. Finally, even though the cost of acquiring this robotics kit was not prohibitive (relatively inexpensive), it was considered that the benefits of using this particular kit outweighed the cost factor.
Procedure
The research procedure used the observation technique within the laboratories and outside during class breaks. During the laboratories group work, the ATC21S was used in order to observe the performance of collaboration skills. All the assessments and observations within the laboratories were conducted by the teacher/researcher. The authors acknowledge that this is a limitation of this research which is described in the following section, “Limitation and Future work”.
The teacher/researcher, as part of his professional duties in the schools conducting the research, was assigned once a week to monitor the students during class breaks. During that time, the teacher, acting as a research instrument as well, collected behavioral differences from the students participating in the case studies, and wrote them in the research diary. The teacher also collected information from other agents such as the class teacher, headmaster, and physical educator, and wrote this down in the research diary.
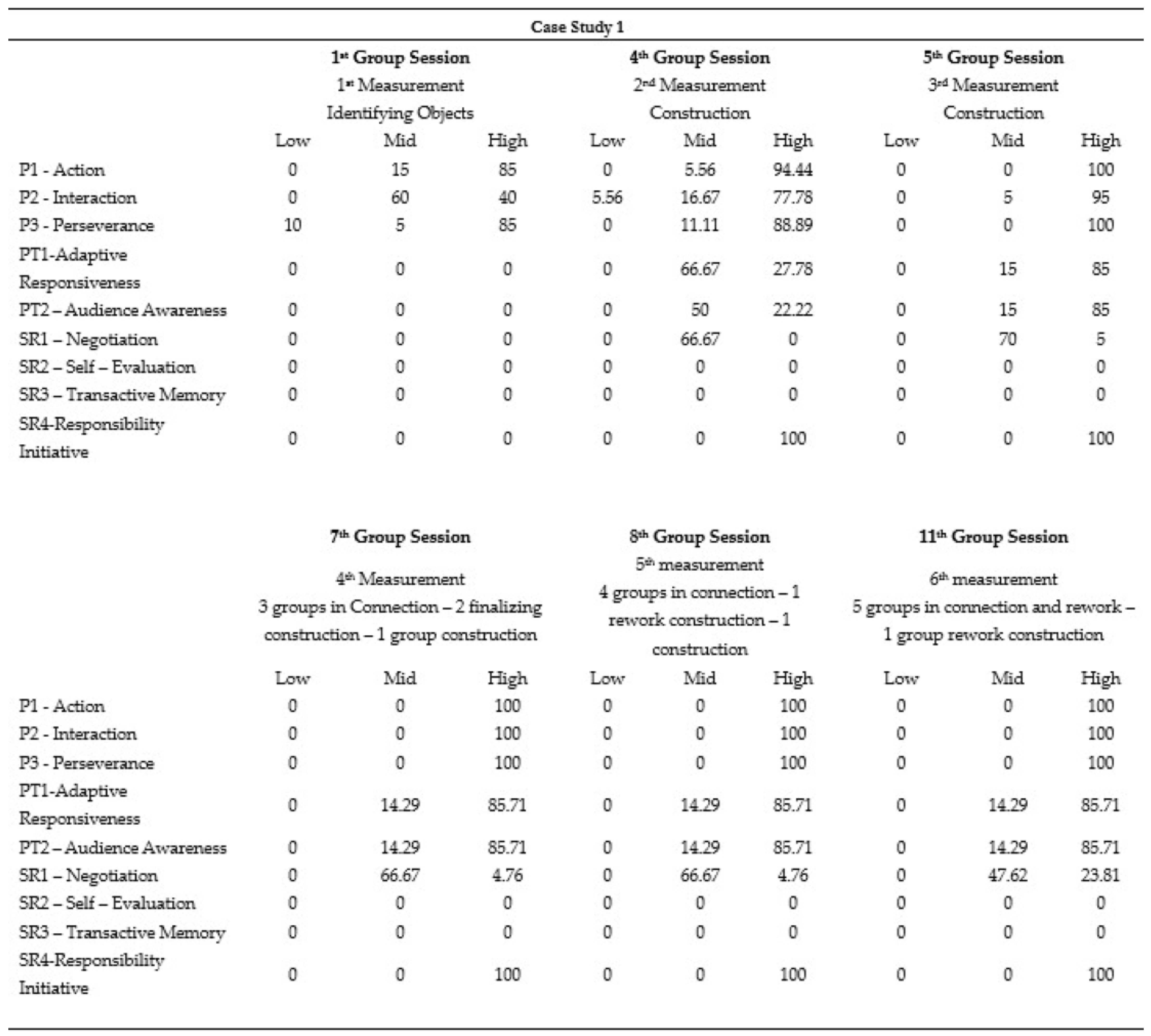
The assessments (green horizontal boxes—
Figure 1 and
Figure 2) were conducted using the framework during the group sessions that presented increased interest. The increased interest was determined by the knowledge content of the educational robotics tasks. Therefore, the students were assessed when starting to construct the robotic artifact, when sharing knowledge of connecting the robotic artifact, and when the groups started the programming phase. Additionally, it was decided to assess the students’ skills before and after the school breaks (grey boxes—
Figure 1 and
Figure 2) in order to further understand if the absent time of the whole class affected the performed collaboration skills.
During the group sessions (orange horizontal boxes—
Figure 1 and
Figure 2), they were not assessed using the ATC21S framework, but were mainly focused on collaborative issues that could not be strictly defined by the framework, but relative to collaboration skills defined by Evans C. [
4] in
Section 2.2. These issues were mainly focused on how the students faced the challenges (tasks, time and instruction) collaboratively, and the impact of the teacher/researcher on the endeavor. The aim of these observations was to deepen even more the information available and to shed more light on factors, such as student to student and student to teacher relationships.
Case study 1—Assessments with ATC21S—Group sessions: 1, 4, 5, 7, 8, 11;
Case study 1—Observations of collaborations skills—Group sessions: 2, 3, 6, 9, 10;
Case study 2—Assessments with ATC21S—Group sessions: 1, 2, 4, 6, 7, 10, 12, 13, 14;
Case study 2—Observations of collaboration skills—Group sessions: 3, 5, 8, 9, 11.
Finally, it was interesting to investigate if the students participating in both case studies could express any new personal or collective behavioral patterns (sharing resources, perspective taking, conflict resolution, etc.) that could potentially be the result of their engagement in the laboratory group sessions. Within this process, the teacher/researcher collected observations (vertical orange boxes—
Figure 1 and
Figure 2) from the class breaks between the laboratory group sessions within the school year. These observations were conducted during all the class breaks for one day per week.
3.2. Anatomy of the Proposed Methodological Approach
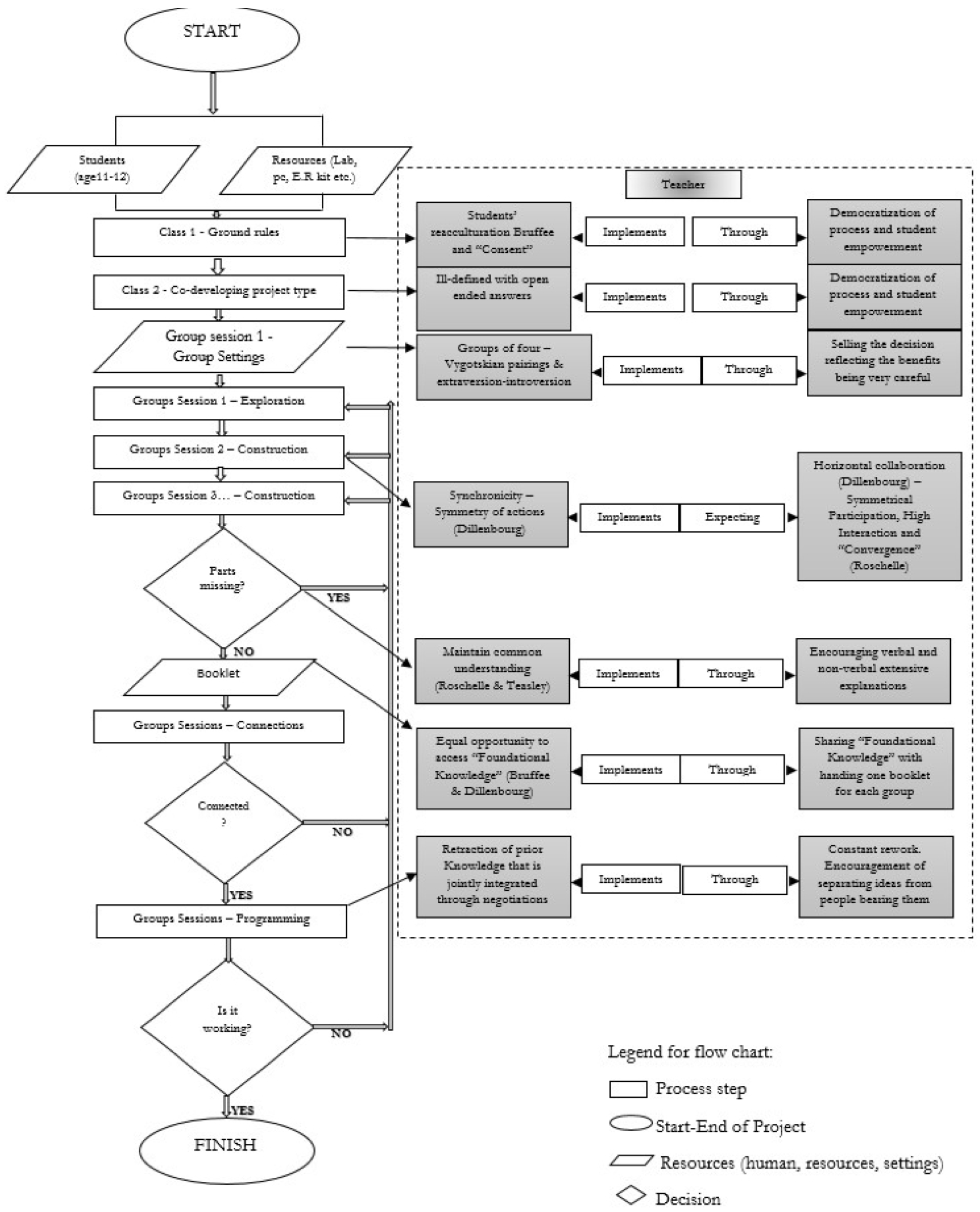
The following section aims to deliver a detailed step-like description of the methodological approach that was implemented in both case studies. Due to the nature of collaboration and the complexity of developing collaboration skills, it was decided to depict the methodology in a step-like fashion.
Figure 3 depicts the steps of the educational intervention in phases, and the instructions of the teacher for every step. The methodology includes the following:
Re-acculturation;
Co-creating project;
Group formations—instruction;
High synchronicity—instruction;
Common understanding—encouragement;
Collaborative learning—equal opportunity to new “Foundational Knowledge”;
Collaborative problem solving—with retraction of prior “Foundational knowledge”.
The decision points (
Figure 3) are the points where the students have to decide on how to move forward. When the students are ready to move forward into the next phase, e.g., finalizing the first stage of constructing the artifact, it is important for all the members of the groups to have conversations to reach a common understanding (about the elements of construction), and this has to be ensured and encouraged by the teacher. Additionally, when the students receive the booklet with detailed technical instructions at the next step, the teacher has to ensure that students within the groups disseminate and share the “foundational knowledge” among them in an inclusive and thorough manner. When reaching the second decision point, the students have to observe and process if the connections are working, and if not, they have to rework all the previous stages, going through the constructing phase and reading more carefully the booklet. Similarly, when reaching the final stage of programming, they have to retract their previous knowledge of Scratch programming. If something is still not working, they have to revise all the previous steps. However due to the increased knowledge that the students have acquired and created at this stage, it is important for the teacher to encourage the students to try to separate the ideas from the students bearing them, in order to enter into negotiating conversations that are directed towards solutions, by engaging in constructive criticism without being prone to personal conflicts.
As the projects progress during the group work flow from one stage to another, the teacher has to ensure that collaborative work is promoted throughout the process. The theoretical background of what constitutes collaboration has to be brought forward with simple, understandable instructions and settings for the students. The very basic notion behind this methodology is to ensure open communication channels that enlarge and deepen gradually among the students, and establish equal access and opportunity to sharing, disseminating, and creating new knowledge.
However, because collaboration can be a delicate issue to be implemented due to its dependence in relation to having consensus built among and with students, it was important to address how the implementation was carried out by the teacher/researcher as well. The following subsections deliver explanations of how the methodology was implemented, and the conceptual bridges with the theoretical background enhance the understanding of the potential reader/educator, in order to repeat the methodology within formal educational settings. Finally, the last sub-section of the proposed methodology presents two potential challenges, paired with how using the methodology resolved these challenges.
3.2.1. Re-Acculturation (1st Class Session)
The main goal of this first class is to start a conversation with the students and understand what their experiences towards group work are. It is meaningful to invite all the students into the conversation and receive as much feedback as possible from all the students. It is important to collect negative past experiences and categorize in real time the issues that students are mostly concerned with. All three case studies revealed that students were concerned with the negative effects of: badmouthing, student exclusion, egoism and selfishness, loafing, unresolved past conflicts, fear of facing the robotics challenge, and punishment.
After this process is completed, it is important to address the students’ concerns with practical yet theoretically-sound ground rules that can support the development of meaningful student interactions. The ground rules have to therapeutically address the concerns of the students while also addressing important prerequisite elements towards the development of open communication channels. While every ground rule is brought forward by the teacher, it is important for every student to express their opinion and agree or disagree. This element empowers students and creates the bases for open communication between the students and the teacher.
During the pilot case study, there were created a set of ground rules [
50] (as presented below) to construct the conceptual campus whenever the occasion needed it. It was noticed that even though the students’ will to explain was evident, sometimes students could not find the words to explain their thoughts.
All the members of the teams are equal;
When a member of your team is talking, think what they are saying;
If you think what they say, tell them what it is that you like;
If you did not have the time to think, take your time to think, and when you are ready, express your opinion, or if you didn’t understand something, ask a question;
It is good when you are talking to look at each other;
Do not talk in a bad manner or in an underestimating way to anyone, however much you disagree. Remember that many great ideas are created when people disagree with each other in a civilized and kind way;
Ask many questions! You will see that you have all the answers within you (all of you);
Some students are talkative, some are less talkative, and some do not talk at all. Remind your groupmates that talk a lot, to talk less, and to help the students that do not talk as much to step into the conversation. If a student is still not talkative, respect this fact and let them step into the conversation when they feel ready to do so. In this way, more students will participate and it will be fairer for all;
When something does not go the way it is supposed to go, take a small break and reflect back on what you have achieved as a team and do not stress. If you need assistance, ask the teacher for help;
And remember…all for one and one for all!
If you think that you cannot express yourself in words, show what you think in any way you can, with your hands, movements, or something else. Just try to make your groupmates understand you.
This observation was the reason behind the creation of an 11th additional ground rule that enhances student interactions with intentional non-verbal communication aspects, which is a unique element that has not been used before in case studies in relation to collaboration skills development in educational robotics.
3.2.2. Co-Creating Project (2nd Class Session)
Starting the second class, it is important to remind the students of the ground rules. The main goal of this class is to mutually develop a general idea of a project that is accepted by all. Again, consent is an important factor that supports the underlying notion of intrinsic motivation [
26]. However, there are more issues that have to be considered other than consent.
The teacher has to be aware that the project that the students will be engaged with needs to be solvable but complicated enough in order to support the necessary ground for planning, decision making, etc. If the students engage in an idea that is unsolvable, they may lose interest and the endeavor may fail. Additionally, the teacher has to present the functional limitations of the robotics kits (type of sensors, motor and hub) without getting into details (this is a process that will have to be explored by the students).
The project should entail ill-defined characteristics that allow open-ended answers, but at the same time, the general idea should be common for all the students of the class. It is obvious that by having an ill-defined project with open-ended answers supports the creation of elaborated explanations. The reason behind the general common idea is rooted to the notion that this methodological approach focuses on creating skills that can potentially migrate from the inner environment of the group to the outer environment of the group, which is the whole class. The common ground for collaboration can be enlarged if all the students of the class agree upon a general idea with the same limitations.
For example, if a vehicle is agreed to be constructed, it can be created by the groups without the strict definition of what a “vehicle” is. Therefore, the vehicle can have wheels or no wheels, two wheels or three wheels. Secondly, if the “vehicle” is decided to perform an action, this action can be the result of using a distance sensor or a movement sensor, or something else. Thus, thinking out-of-the-box creativity is enhanced by giving the freedom to explore different functionalities. Additionally, if a group reaches a point where the cognitive load is too heavy to overcome (this can happen in very demanding tasks), the general common ground of the project may be supportive for intergroup collaborations to be developed. Intergroup collaborations may activate even deeper collaboration skills that are related to initiating contributions, which can be performed in later stages of the projects.
3.2.3. Implementation of Group Formations (1st Group Session)
The group formations are a very delicate endeavor which, if not handled carefully, can potentially undermine any effort for developing collaboration within the groups, and hence collaboration skills. Feelings are very important to students of this age, and the teacher has to reassure that the implementation of the ground rules will be monitored. On the other hand, the students start to understand that the ground rules that were previously crafted are not just words on a piece of paper. Consequently, both the teacher and the students have to make a leap of faith to trust each other. This process is easier when a teacher has had experience with the class, and is more difficult when the teacher has not; and it may take more than one didactical session to be completed. In all three cases, one didactical session was adequate.
Even though Lai [
36] proposes a horizontal type of role-giving within the groups for students, this approach does not support role giving of any type. The notion that this approach follows is for the students to constantly self-select their functional and social role in the group. Even if horizontal types of roles are given to students, it is not clear how these roles may be interpreted by the students. Additionally, it creates an extra load for the students and the teacher, and it practically hinders the risk of shifting the behavior to be more un-natural and more restricted.
The approach proposes that the groups should be formed according to their natural inclination of communication patterns. This means that pairings within the groups should have a blend of pairs of introverted/extroverted students. This notion supports the creation of high meaningful interactions. As previously mentioned, according to Hesse et al. [
14], high interaction is a necessary prerequisite for developing collaboration skills.
The size of the groups should range from 3 to 4 depending on the class size, with 4 being optimal. It was observed during the pilot case study that groups that remained with 2 students were lacking the larger pool of knowledge and skills that the rest of the groups that consisted of 3 and 4 had. It is indeed hard to generalize, but given the fact that the activity is demanding both mentally and socially, the decision was made to follow this pattern.
If the pattern of 4 is followed, and the class size does offer perfect groupings of 4 students, then ideally pairing two introverted students with two extraverted students would help the process of enhancing the level of interactions. If the class size does not offer perfect groupings of 4, then the decision should incline towards the creation of groups of 3 as well. Ideally, a student with a highly introverted preference would sit beside an extroverted student, and an extroverted would sit at the opposite side of the table. If the number of introverted students is two within a group of 3, then the more introverted ones should sit beside the extroverted one, and this pattern may be altered if the teacher observes lower interaction between the two sides of the table.
3.2.4. Implementation of High Synchronicity (2nd Group Session)
At this session it is important to introduce the instruction of simultaneous actions towards the construction of the artifact. This instruction supports collaboration at two levels.
The first level is the level of equal knowledge construction among the group members. In this way, the students will have an equal opportunity for action, which may lead to more symmetrical actions [
15]. The symmetrical actions hopefully will create a symmetrical level of student knowledge. The relative symmetrical knowledge that is constructed is a prosperous ground for argumentation and negotiations. It is also less likely for a student to drift away from the collective efforts of the group if, from the start of the project, they are a part of the co-constructed group knowledge.
The second level is the level of communication between the students. It is inevitable to initially interact physically when simultaneous actions are promoted. In this way, the non-verbal instinctive interactions while sharing the Lego bricks start to transform into verbal interactions. Consequently, the verbal interactions can slowly transform into simple exploratory questions and gradually form deeper conversations as the project progresses.
Even if simultaneous action is instructed, it is not rare to observe the instinctive division of labor. This thought has been also expressed by Miyake [
51], but one has to understand what the actual division of labor consists of and what the relation between the tasks is. When the division of labor is horizontal, as Dillenbourg [
15] explains, it can lead to reasoning layers, because the tasks are interwoven.
The teacher has to be very careful how the instruction of “simultaneous” actions is delivered. It should not be forgotten that vertical instructions are not very compatible with the student-centric approach. However, if the teacher delivers adequate explanations about the reasons behind the necessity of the instruction (equal opportunities, common knowledge, etc.), it can be smoothly implemented.
3.2.5. Common Understanding (3rd Group Session)
This session is focused on transforming the high interactions that are starting to be formed into interactions that have more meaning and reflection. During this session, the teacher transforms into a collaborator and monitors the actions and interactions of the students. During all three case studies, the students felt slightly anxious and impatient; consequently, it is meaningful to reassure the students that their actual performance is not the goal of the project. This anxiety may be rooted in the fact that the case studies took place within typical school settings where students expected grades every 3 months for every subject taught (computer science included).
It is important at this point that “shared conception of a problem” [
17] is a part of what is defined as a prerequisite condition for collaboration. It is during this session and onwards that the pedagogic approach aims to transform the high quantity of interactions into interactions that entail more quality elements in them.
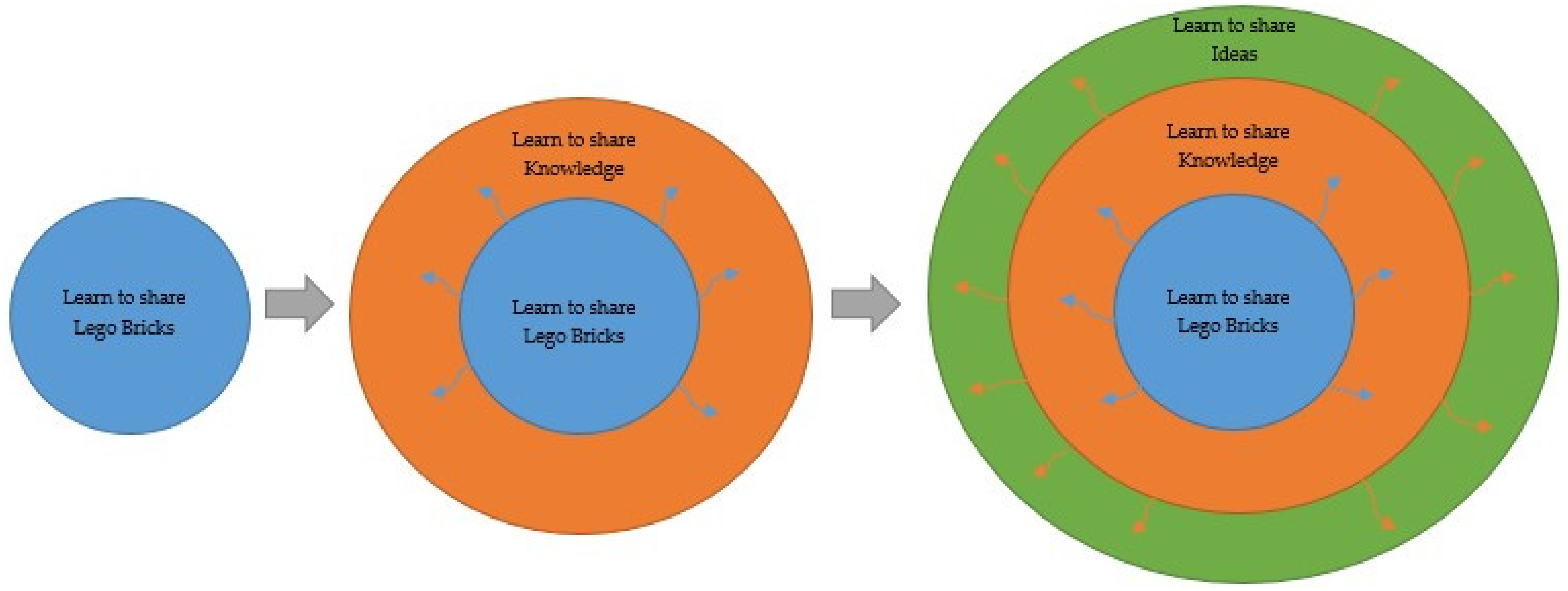
Bruffee K. [
30] expressed it in a compact yet powerful way, “By learning to “share our toys” I mean learning to share our books, our ideas, our beliefs…Most of us spend a lifetime learning to share our toys”. Thus, in an abstract yet very practical way, the students started sharing their toys; then the teacher helped them on how to “share their toys”, and the actual toys became the “toys” that Bruffee further explained. The progression continues, but the toys become ideas, conceptions, strategies, etc. The question is how well these “toys” will be communicated and integrated.
Reflecting back to the ground rules, there is a deliberate effort by the teacher to start introducing a high level of questioning. This effort is not implemented by vertical instruction, but through being a standby collaborator, e.g., “This is an interesting choice…why did you use this narrow band?” The responses of the group reveal if all the students understand the issues. The students are encouraged to provide explanations in order to “invite” their groupmates into the conversation.
Thorough explanations of tangible and technical matters that are considered an unknown context for the students present difficulties for many primary school students. Terminology for parts and procedures often contains unknown words. The contribution construct, however, has to be developed and supported. Therefore, the infusion of richer information exchange through non-verbal means can create more possibilities for equal opportunities for all students to contribute their thoughts to the joint effort. Since the “…contribution construct refers to a cognitive action that contributes to advance in the collaborative goal…” [
52], it is meaningful and of critical importance to enhance it in every way possible, and this approach is designed for all the students to have as much of an equal opportunity to participate as possible.
3.2.6. Collaborative Learning (Group Session X—Connections)
While the previous sessions aim to deliver an initial activation of collaboration skills through designing and constructing without any previous experience, which is to a great extent an exercise of convergence, the next stage is a very demanding one in terms of knowledge.
In the sense that the students had to keep collaborating without being fed the technical issues by the teacher, it was decided to design and hand the students a booklet of technical instructions to prevent them becoming helpless and inevitably exhausted. In this manner, the students will have to activate collaborative learning in its very basic and authentic form, and learn together.
It was indeed a puzzling matter what to include and what not to include within the booklet, but given the fact that the students are well accustomed to pictures and photos, it was decided to portray the phase of connecting the artifact with the computer with screenshots and photos of the devices with very few words. The functionality of the sensors was not explained, but it was left to be explored through the use of the s2bot application. Additionally, there was a sample program that included the “new” commands in Scratch 2 that are necessary to program the motor and the use of the sensors.
Every group was handed one booklet and was advised to share, read carefully, and make sure all the group members understood everything before moving forward to the programming phase. All the groups had the freedom to move on to the next phase when the group members decided to do so.
In both case studies this phase was frustrating for the students, but at the same time it forged their individual and collective commitment to keep going with numerous attempts to connect their artifact.
3.2.7. Collaborative Problem Solving and Negotiations (Group Session Y—Programming)
As previously mentioned, the students do have some previous experience in Scratch programming, and indeed many of them can complete a program that includes even complicated “repeat” and “if” commands. Have all students acquired the same knowledge from previous years? That is a tough question. The reality shows us that within classes, even though all students are taught the same curricula with the same teachers, there is a difference when it comes to programming. This can be due to many reasons, but it is a reality that this approach has to take seriously into consideration.
It is understandable that when a student within a group does not remember or never actually grasped Scratch programming, the group can easily be advised to share their knowledge with their groupmate and bring them to roughly the same level as the others. But what happens when a whole group does not have the knowledge level to program? In a way, everything comes down to this point. Are we going to let that group just look at the others progress, or act upon this collaboratively? If we act collaboratively, is it going to be the teacher’s instruction or a contribution initiative from the students?
We have to remember at this point that all the students have undergone a painstaking process within their groups, but with a common ill-defined project. Competition among the groups was not at any stage mentioned, and students were reassured that this project would not affect their grades.
The students could easily be instructed to perform a jigsaw or a jigsaw-ish pattern. This pattern would enhance and speed up the process. However, the proposed approach aims to migrate collaboration skills outside the group into the grander environment of the class. The question that the teacher can express is simple, “It seems that a group has a problem with a programming issue…do you agree if someone from another group help them?” In all cases when this question appeared, many students offered their help. However, what happens with the knowledge transmission that is delivered from an external student?
It is important at this point for the teacher to direct the help-recipient group into using only the information that is useful for their own strategy. Similarly, it is important to direct the transmitter to restrict the information to what is only needed for the recipient’s strategy and to not attempt to influence their whole strategic approach. In this way, the help is tailor made for the recipient’s needs and not vice versa. In a sense, if we make this an abstract yet practical paradigm, the students can exercise perspective taking (and not perspective making) in a deliberate effort to help and not to alter another group’s strategy. It is also understood that when a student or students are helping another group, they pose an element of authority because they are perceived as more knowledgeable at a particular sub-task by the help-receivers; this has to be seriously taken into account.
In this way, the students learn to respect the joint creations of other groups, while contributing to the advancement of their knowledge, and indirectly growing and refining their own collaboration skills. We have to remember again at this point that “…transferable skills are associated with process rather than result…” [
38], and if students are presented again with group activities outside this particular environment, they can potentially use the memory of this experience collaboratively in a different context or experience.
3.2.8. Potential Challenges
When reaching the second group, it was noticed that one group of students had already constructed and finished the artifact and were expecting the teacher to come and observe the progress, and to move on to the next phase and hand in the booklet with the detailed instructions. When the teacher arrived and observed the artifact, it was noticed that the artifact was meticulously created, but it was a design that was derived from the already-made designs of Lego WeDo 2. The teacher had a deep knowledge of all the ready-made creations of the specific kits that are circulated on the internet, and had read all the detailed instructions. How would the teacher respond to this? The creation did not reflect the guidelines, but with a small alteration in placing the sensor, the artifact could potentially be functional for the project that all the students decided to develop.
The first question, asked in a non-criticizing voice, was “who created this wonderful artifact?” The answer, of course, was that one student created it and the others did not want to comment on that. It was obvious that the student had overtaken the project immediately and started creating it without taking into account anyone else. This was reflected in the first measurement as medium action and low interaction for this particular group, from two students, but at the start of the projects, this was not a surprise. The ground rules were not followed and the rest of the students did not collaborate in the horizontal manner that Dillenbourg [
15] described, but in a vertical way following the actions of the one with the knowledge. This simple example brought to mind the hierarchy of knowledge and the hierarchy of authority. It was the exact point where the teacher had to transform this experience into a collaborative one, without the use of any negative extravagant expressions or disappointment; after all, the students were there to firstly enjoy themselves. The next question was “is this created by all?” The students indeed hesitated to answer, but the voice of the teacher did not make them fearful, so the answer was that they were just following what that student told them. This confrontation made the student behind this creation start talking, and he revealed what was already known to the teacher.
However, this action disrupts the whole concept of an “unknown situation” by all. Indeed, but unexpected things happen all the time within classrooms and laboratories. The notion that was followed was to remind the students in that particular group of the ground rules that all consented to and should start implementing. In order to therapeutically intervene in this situation, it was asked for the student to disseminate his knowledge to the rest of the group, and to do it the best way that he possibly can. In reality, the student did not have any knowledge of the more foundational aspects of motors and sensors, but managed to understand how to construct and assemble the gear systems. Consequently, the student tried to explain to the rest of the group members to use the parts in this particular position, etc. This brought an element of collaborative learning into the situation, and it was received by the rest of group members as an altruistic and positive move. However, the artifact is already made and it contains a ready-made design copied by the Internet. What would happen to that? This decision had to be made by the students collaboratively, since decisions are supposed to be jointly and mutually agreed upon. The next question that the teacher asked was, “how are you going to move forward now? It is your decision…” The student that brought the already-made design asked the groupmates if it was ok to disassemble the artifact and start over again, and the rest of the students nodded and agreed. The result was that the students in that particular group felt better, and this was measured with higher levels of perspective taking skills at the next measurement at the 4th group session. This interaction was not left unnoticed by the bystanding groups, and as everything in a school community was discussed and gossiped, it was food for thought for all during the following class breaks.
The second example involved the exclusion of a student from the group efforts. Even though, again, the re-acculturation process ran smoothly, and all students expressed their fears and concerns about group work, which was made into a statement of consent for the ground rules, there was a student left outside of the joint efforts of a group, who then expressed a desire to change groups and move to another one. This is not uncommon within school settings in primary schools. However, it can potentially disrupt all the students’ groups, and subsequently, more students would ask to move into different groups with their friends if this request would be approved. The teacher decided to sit beside the group and observe the creation of the artifact. One student was driving the creation and the other one was following, while the third was simply active with a different set of bricks. We have to remember that the simultaneous actions instruction was not yet implemented at this session. The teacher decided to let the students explore the kit and wait until the next session, as designed by the methodology.
The simultaneous actions instruction was delivered, and this particular group performed with high levels of participation skills. Even though the interactions were high in all three students, within the context of exchanging bricks among them, there were no verbal interactions with that student. The teacher visited the particular group and observed that the two students were interacting and verbally communicating, while the third student was excluded from the joint efforts. The question was simple: “Are we all participating in this equally?” The answer from the student was negative, while the student that led the project accused the excluded student of not being a team player. The teacher reminded the group the ground rules that all consented to, and asked if the artifact presented the joint efforts of all three students. Within the conversation, it was revealed that the two students had an argument two years ago that resulted in them not talking to each other. The way the artifact was created reflected the relationship of these two students. The teacher asked the students, “how do you think, you can move on from now on?” The students responded that they all wanted to disassemble the artifact and start a new one. During the following sessions, the group started opening the lines of verbal communication and started to assemble the artifact, activating the perspective taking skills among all three students, which previously were not observed.
The above examples show in brief how two incidents can undermine the activation of collaboration skills in students. Both of them were rooted in background feelings that in this particular age are critical for the students. For the first example, it was very important for the student to show and impress his groupmates with his abilities, and this resulted in a non-symmetrical level of knowledge among the students. This non-symmetrical level of knowledge was transformed into non-symmetrical authority among the students. This finding is in line with the statement of “symmetry of knowledge” that Dillenbourg [
15] believed to be a prerequisite condition for collaboration to function. Meanwhile, the second example was rooted back in an argument between two students. The notion of Evans C. [
4] that “Whether students self-select into groups or the teacher makes this determination also can affect the collaborative activity and its benefits” is conceptually valid. However, how can a teacher introduce a methodology in order to develop collaboration skills if communication is expressed poorly by some students? We have to remember again at this point the notion of Lench et al. [
20], that “Collaboration requires communication because it is impossible to collaborate without some form of communication”. This methodology created a collaborative point of reference (ground rules), initially in order to reflect the students’ concerns, and in parallel to that, reflect the practical guidelines in which communication can be enhanced and maintained.
As mentioned previously, case studies that take place within real life school conditions entail many elements that present unexpected situations that need to be faced. Additionally, when transferring an educational robotics tool within typical formal educational settings paired with group activities that are foundationally demanding for the students, the educator needs to be supplied with methodologies that are based on sound theoretical concepts. Although the theoretical concepts do reveal a point of reference on how the methodology can be implemented, there are always conditions and situations that need to be reflected to the students that are participating in the learning process. Standardizing the element of flexibility of a methodology focused to develop collaboration skills in primary school settings is considered valuable for its practical implementation within real life school conditions. Having an assessment tool that defines as much as possible the multifactorial aspects of indicators proved to be beneficial for this research. However, as shown by this research, the preconditions and the general democratic environment that were initially implemented played a significant role in developing the prerequisite ground for collaboration skills to be honed.



 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}