
Design, Construction and Tests of a Low-Cost Myoelectric Thumb



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
- -
- Enabling holding round objects with diameter 60 mm;
- -
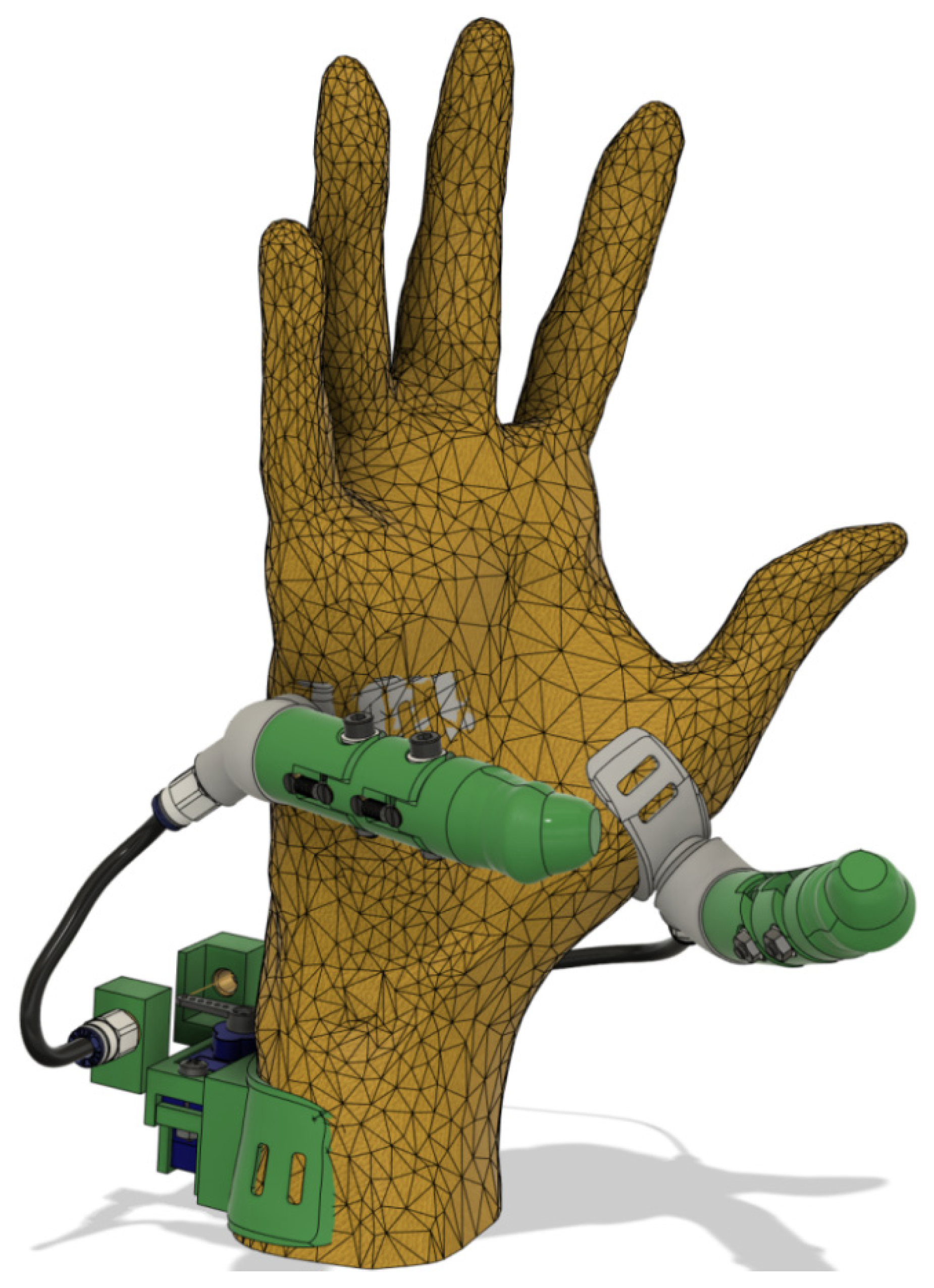
- Custom-made hand part with good fit to desired position;
- -
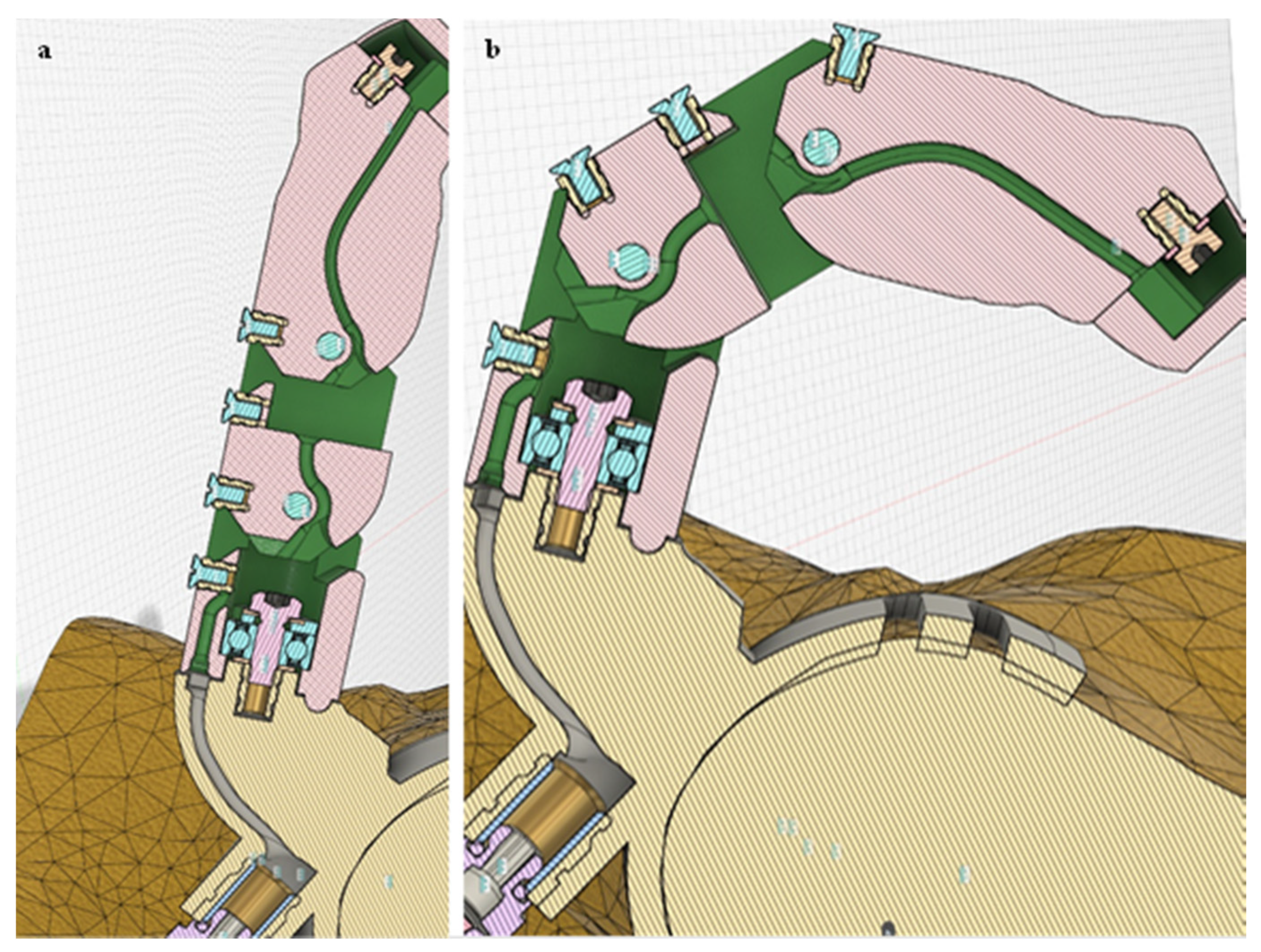
- Rotation of minimum 40° of the thumb;
- -
- Maximum dimensions of length 80 mm and width 20 mm to make the extra thumb similar to a normal one;
- -
- No sharp edges, ergonomic construction;
- -
- Using a spring to let the thumb relax into the neutral position;
- -
- Maximum mass, including servomotor, of 50 g;
- -
- Production by 3D printing;
- -
- Low-cost materials and parts, ideally leading to an overall price below 100 €.
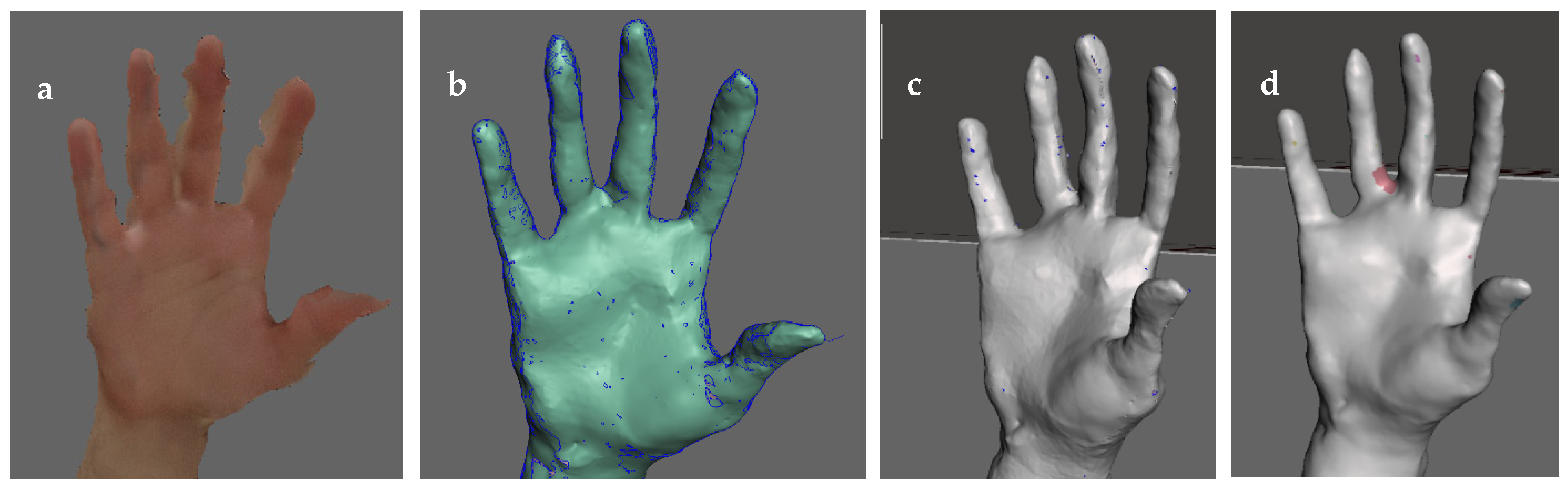
2.1. Customization
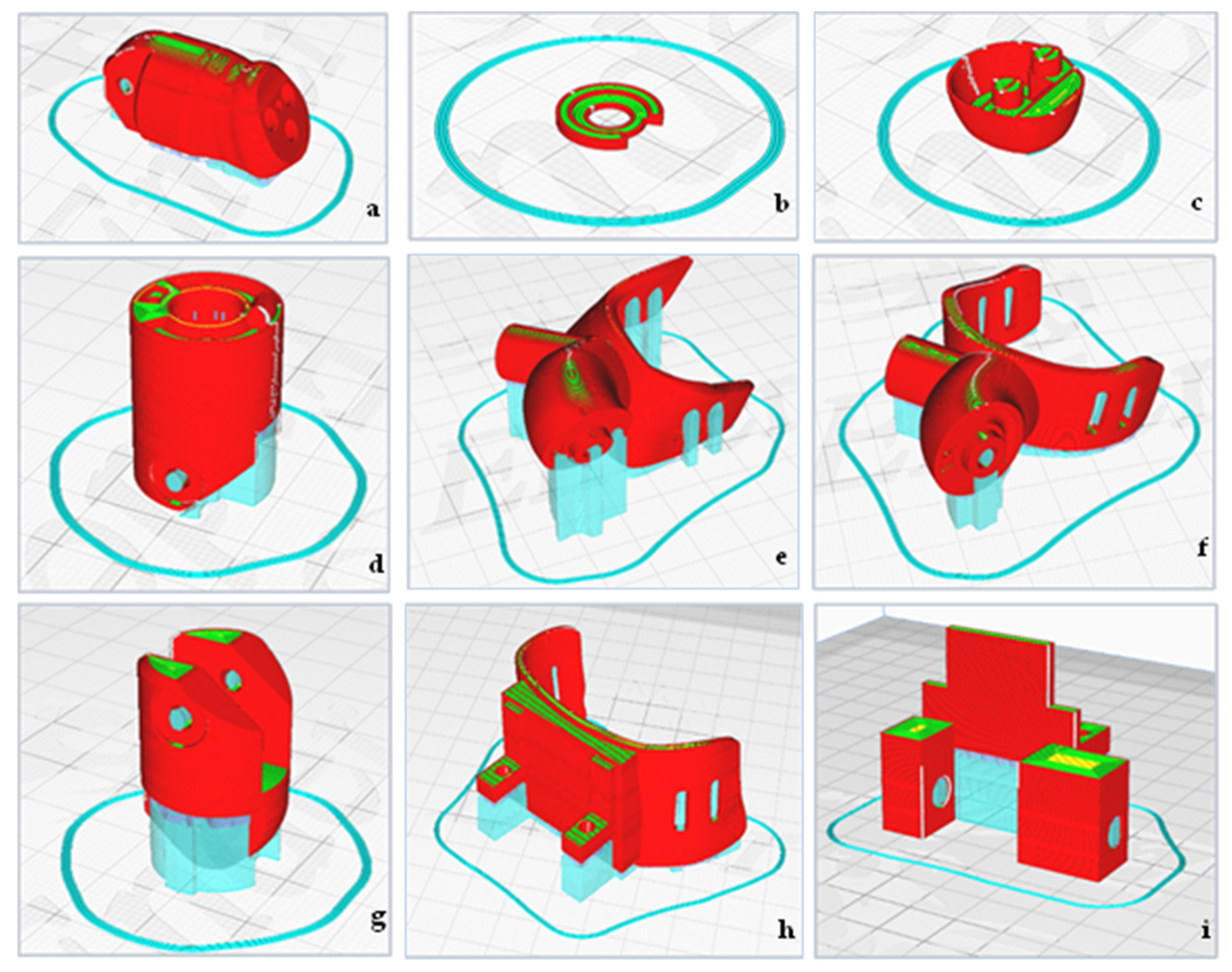
2.2. 3D Printing
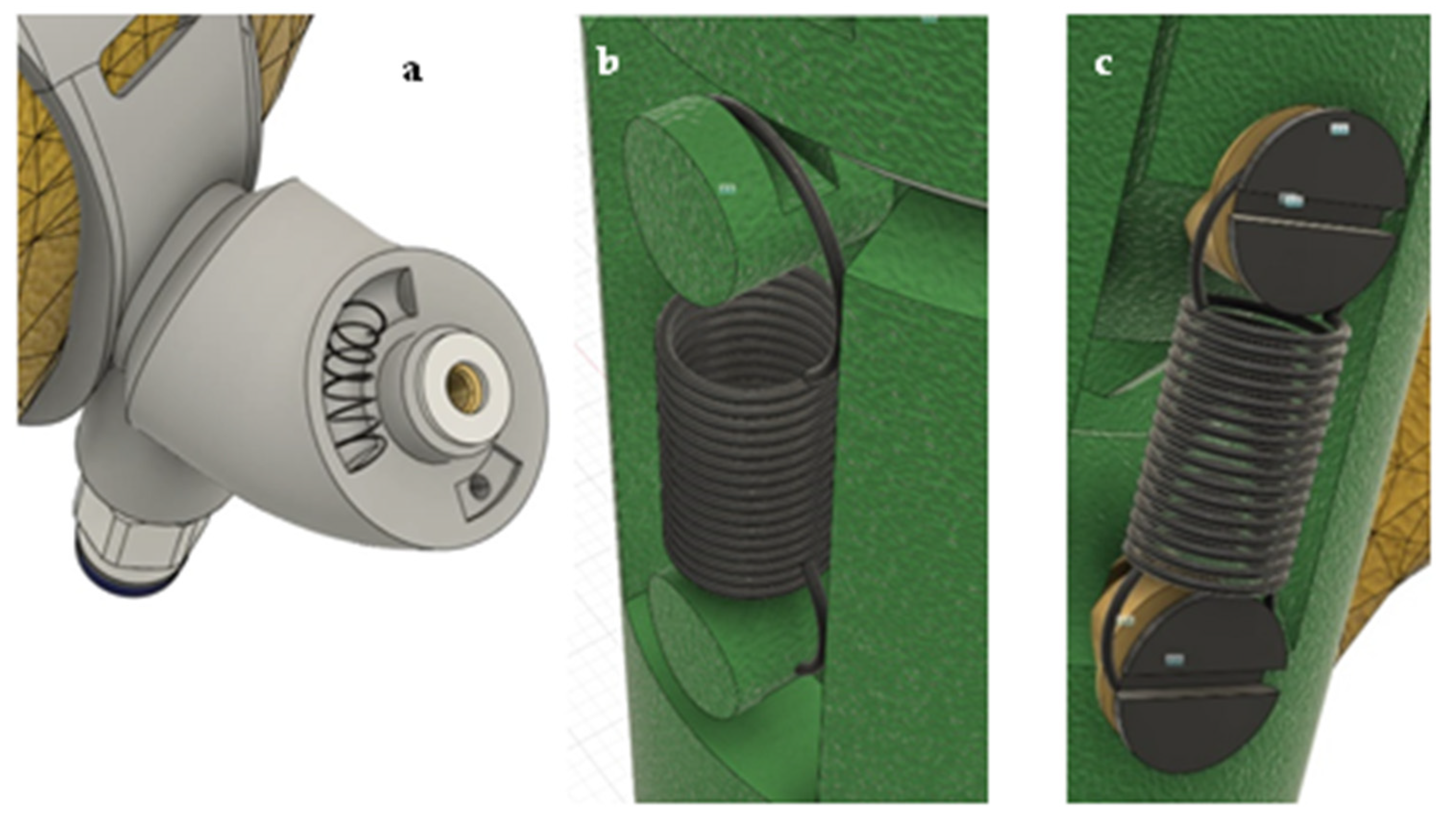
2.3. Springs to Let the Thumb Relax
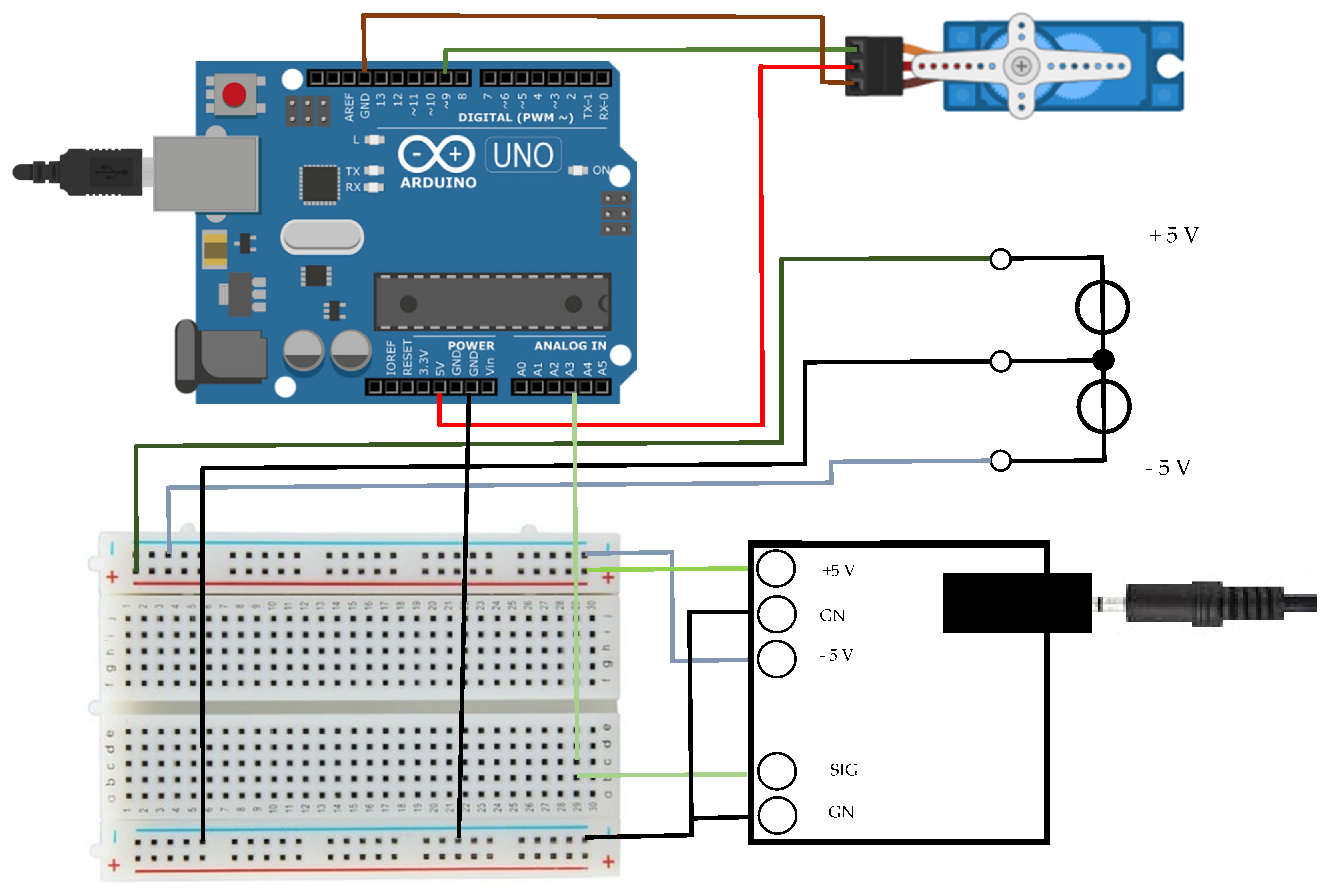
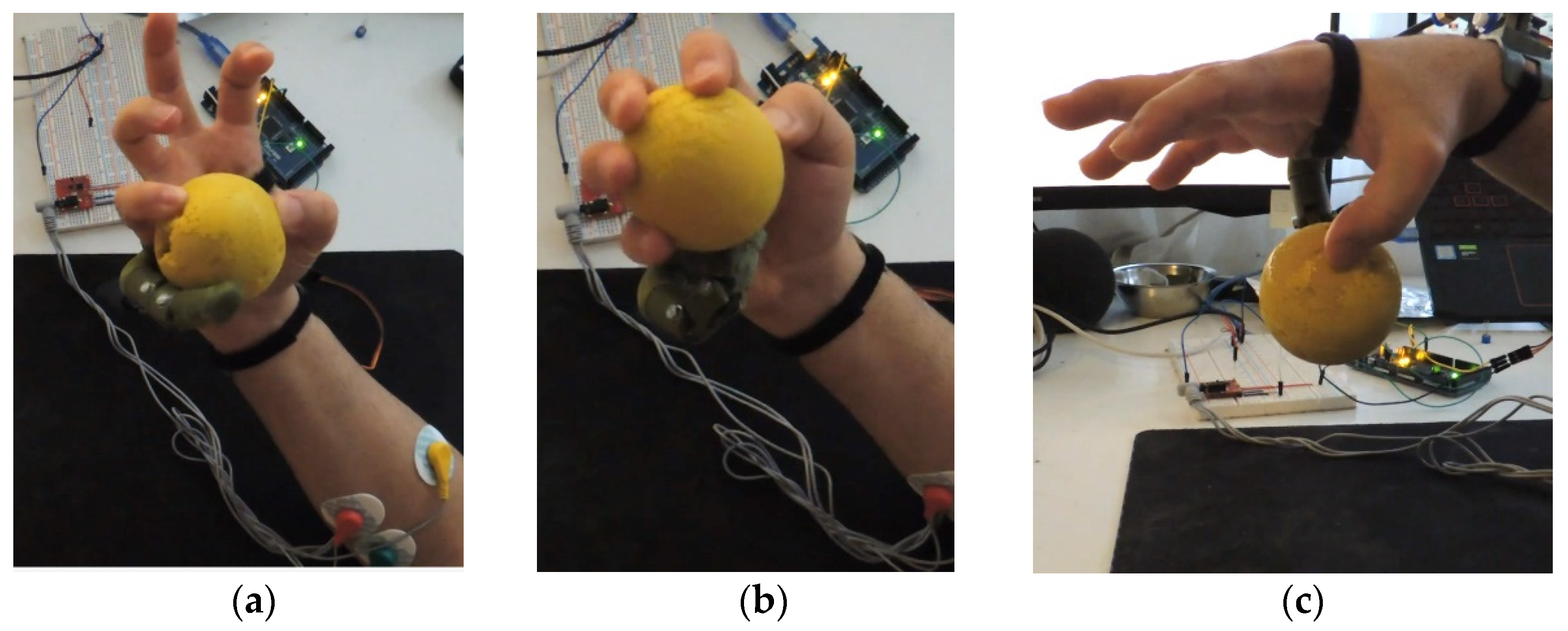
2.4. Electronics, Sensors and Programming
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Childress, D.S. Historical aspects of powered limb prosthesis. Clin. Prosthet. Orthot. 1985, 9, 2–13. [Google Scholar]
- Geethanjali, P. Myoelectric control of prosthetic hands: State-of-the-art review. Med. Devices Évid. Res. 2016, 9, 247–255. [Google Scholar] [CrossRef] [PubMed]
- Hahne, J.M.; Biessmann, F.; Jiang, N.; Rehbaum, H.; Farina, D.; Meinecke, F.C.; Muller, K.R.; Parra, L.C. Linear and nonlinear regression techniques for simultaneous and proportional myoelectric control. IEEE Trans. Neural. Syst. Rehabil. Eng. 2014, 22, 269–279. [Google Scholar] [CrossRef] [PubMed]
- Cipriani, C.; Zaccone, F.; Micera, S.; Carrozza, M.C. On the shared control of an EMG-controlled prosthetic hand: Analysis of user-prosthesis interaction. IEEE Trans. Robot. 2008, 24, 170–184. [Google Scholar] [CrossRef]
- Weir, R.F.; Troyk, P.R.; DeMichele, G.A.; Kerns, D.A.; Schorsch, J.F.; Maas, H. Implantable myoelectric sensors (IMESs) for intramuscular electromyogram recording. IEEE Trans. Biomed. Eng. 2009, 56, 159–171. [Google Scholar] [CrossRef] [PubMed]
- Kuiken, T.A.; Li, G.; Lock, B.A.; Lipschutz, R.D.; Stubblefield, K.A.; Englehart, K. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA 2009, 301, 619–628. [Google Scholar] [CrossRef]
- Miller, L.A.; Stubblefield, K.A.; Lipschutz, R.D.; Lock, B.A.; Kuiken, T.A. Improved myoelectric prosthesis control using targeted reinnervation surgery: A case series. IEEE Trans. Neural Syst. Rehab. Eng. 2008, 16, 46–50. [Google Scholar] [CrossRef] [PubMed]
- Hijjawi, J.B.; Kuiken, T.A.; Lipschutz, R.D.; Miller, L.A.; Stubblefield, K.A.; Dumanian, G.A. Improved myoelectric prosthesis control accomplished using multiple nerve transfers. Plast. Reconstr. Surg. 2006, 118, 1573–1578. [Google Scholar] [CrossRef]
- Lotze, M.; Grodd, W.; Birbaumer, N.; Erb, M.; Huse, E.; Flor, H. Does use of a myoelectric prosthesis prevent cortical reorganization and phantom limb pain? Nat. Neurosci. 1999, 2, 501–502. [Google Scholar] [CrossRef]
- Fougner, A.; Stavdahl, O.; Kyberd, P.J.; Losier, Y.G.; Parker, P.A. Control of upper limb prostheses: Terminology and proportional myoelectric control—A review. IEEE Trans. Neural Syst. Rehab. Eng. 2012, 20, 663–677. [Google Scholar] [CrossRef]
- Madusanka, D.G.K.; Wijayasingha, L.N.S.; Gopura, R.A.R.C.; Amarasinghe, Y.W.R.; Mann, G.K.I. A review on hybrid myoelectric control systems for upper limb prosthesis. In Proceedings of the 2015 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 7–8 April 2015; pp. 136–141. [Google Scholar]
- Carey, S.L.; Lura, D.J.; Highsith, M.J. Differences in myoelectric and body-powered upper-limb prostheses: Systematic literature review. JRRD 2015, 52, 247–262. [Google Scholar] [CrossRef]
- Iqbal, N.V.; Subramaniam, K.; Asmi, P.S. A review on upper-limb myoelectric prosthetic control. IETE J. Res. 2018, 64, 740–752. [Google Scholar] [CrossRef]
- Light, C.M.; Chappell, P.H.; Hudgins, B.; Engelhart, K. Intelligent multifunction myoelectric control of hand prostheses. J. Med. Eng. Technol. 2002, 26, 139–146. [Google Scholar] [CrossRef]
- Ma, J.X.; Thakor, N.V.; Matsuno, F. Hand and wrist movement control of myoelectric prosthesis based on synergy. IEEE Trans. Hum.-Mach. Syst. 2015, 45, 74–83. [Google Scholar] [CrossRef]
- Godfrey, S.B.; Zhao, K.d.; Theuer, A.; Catalano, M.G.; Bianchi, M.; Breighner, R.; Bhaskaran, D.; Lennon, R.; Grioli, G.; Santello, M.; et al. The SoftHand Pro: Functional evaluation of a novel, flexible, and robust myoelectric prosthesis. PLoS ONE 2018, 13, e0205653. [Google Scholar] [CrossRef] [PubMed]
- Krasoulis, A.; Vijayakumar, S.; Nazarpour, K. Effect of user practive on prosthetic finger control with an intuitive myoelectric decoder. Front. Neurosci. 2019, 13, 891. [Google Scholar] [CrossRef] [PubMed]
- Gijsberts, A.; Bohra, R.; Sierra González, D.; Werner, A.; Nowak, M.; Caputo, B.; Roa, M.A.; Castellini, C. Stable myoelectric control of a hand prosthesis using non-linear incremental learning. Front. Neurorobot. 2014, 8, 8. [Google Scholar] [CrossRef]
- Resnik, L.; Meucci, M.R.; Lieberman-Klinger, S.; Fantini, C.; Kelty, D.L.; Disla, R.; Sasson, N. Advanced upper limb prosthetic devices: Implications for upper limb prosthetic rehabilitation. Arch. Phys. Med. Rehabil. 2012, 93, 710–717. [Google Scholar] [CrossRef]
- Atique, M.D.M.; Rabbani, S. A cost-effective myoelectric prosthetic hand. J. Prosthet. Orthot. 2018, 30, 231–235. [Google Scholar] [CrossRef]
- Ku, I.H.; Lee, G.K.; Park, C.Y.; Lee, J.H.; Jeong, E.C. Clinical outcomes of a low-cost single-channel myoelectric-interface three-dimensional hand prosthesis. Arch. Plast. Surg. 2019, 46, 303–310. [Google Scholar] [CrossRef]
- e-NABLE. Available online: https://enablingthefuture.org/ (accessed on 19 August 2021).
- Lu, Z.Y.; Chen, X.; Zhang, X.; Tong, K.-Y.; Zhou, P. Real-time control of an exoskeleton hand robot with myoelectric pattern recognition. Int. J. Neural Syst. 2017, 27, 1750009. [Google Scholar] [CrossRef]
- Anam, K.; Rosyadi, A.A.; Sujanarko, B.B.; Al-Jumaily, A. Myoelectric control systems for hand rehabilitation device: A review. In Proceedings of the 2017 4th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Yogyakarta, Indonesia, 19–21 September 2017; pp. 1–6. [Google Scholar]
- Burns, M.K.; Pei, D.Y.; Vinjamuri, R. Myoelectric control of a soft hand exoskeleton using kinematic synergies. IEEE Trans. Biomed. Circ. Syst. 2019, 13, 1351–1361. [Google Scholar] [CrossRef]
- The Third Thumb. Available online: https://www.daniclodedesign.com/thethirdthumb (accessed on 19 August 2021).
- Kieliba, P.; Clode, D.; Maimon-Mor, R.O.; Makin, T.R. Robotic hand augmentation drives changes in neural body representation. Sci. Robot. 2021, 6, eabd7935. [Google Scholar] [CrossRef] [PubMed]
- Meraz, N.S.; Sobajima, M.; Aoyama, T.; Hasegawa, Y. Modification of body scheme by use of extra robotic thumb. ROBOMECH J. 2018, 5, 3. [Google Scholar] [CrossRef]
- Zhuang, K.Z.; Sommer, N.; Mendez, V.; Aryan, S.; Formento, E.; D‘Anna, E.; Artoni, F.; Petrini, F.; Granata, G.; Cannaviello, G.; et al. Shared human-robot proportional control of a dexterous myoelectric prosthesis. Nat. Mach. Intell. 2019, 1, 400–411. [Google Scholar] [CrossRef]
- Markovic, M.; Schweisfurth, M.A.; Engels, L.F.; Bentz, T.; Wüstefeld, D.; Farina, D.; Dosen, S. The clinical relevance of advanced artificial feedback in the control of a multi-functional myoelectric prosthesis. J. NeuroEng. Rehab. 2018, 15, 28. [Google Scholar] [CrossRef] [PubMed]
- Shehata, A.W.; Scheme, E.J.; Sensinger, J.W. Myoelectric prosthesis control strategies. IEEE Trans. Neural Syst. Rehab. Eng. 2018, 26, 1046–1055. [Google Scholar] [CrossRef]
- Betthauser, J.L.; Hunt, C.L.; Osborn, L.E.; Masters, M.R.; Lévay, G.; Kaliki, R.R.; Thakor, N.V. Limb Position Tolerant Pattern Recognition for Myoelectric Prosthesis Control with Adaptive Sparse Representations From Extreme Learning. IEEE Trans. Biomed. Eng. 2018, 65, 770–778. [Google Scholar] [CrossRef] [PubMed]
- Strbac, M.; Isakovic, M.; Belic, M.; Popovic, I.; Simanic, I.; Farina, D.; Keller, T.; Dosen, S. Short- and long-term learning of feedforward control of a myoelectric prosthesis with sensory feedback by amputees. IEEE Trans. Neural Syst. Rehab. Eng. 2017, 25, 2133–2145. [Google Scholar] [CrossRef] [PubMed]
- Winslow, B.D.; Ruble, M.; Huber, Z. Mobile, game-based training for myoelectric prosthesis control. Front. Bioeng. Biotechnol. 2018, 6, 94. [Google Scholar] [CrossRef] [PubMed]
- Boschmann, A.; Neuhaus, D.; Vogt, S.; Kaltschmidt, C.; Platzner, M.; Dosen, S. Immersive augmented reality system for the training of pattern classification control with a myoelectric prosthesis. J. NeuroEng. Rehab. 2021, 18, 25. [Google Scholar] [CrossRef] [PubMed]
- Chalgham, A.; Wickenkamp, I.; Ehrmann, A. Mechanical properties of FDM printed PLA parts before and after thermal treatment. Polymers 2021, 13, 1239. [Google Scholar] [CrossRef] [PubMed]
- Ehrmann, G.; Ehrmann, A. 3D printing of shape memory polymers. J. Appl. Polym. Sci. 2021, 138, 50847. [Google Scholar] [CrossRef]
- Tower Pro. Available online: https://www.towerpro.com.tw/product/sg90-7 (accessed on 21 August 2021).
- Dupan, S.S.G.; Vujaklija, I.; Stachaczyk, M.K.; Hahne, J.M.; Stegeman, D.F.; Dosen, S.S. Online simultatenous myoelectric finger control. In Converging Clinical and Engineering Research on Neurohabilitation III; Masia, L., Micera, S., Akay, M., Pons, J., Eds.; ICNR 2018. Biosystems & Biorobotics 21; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Srimaneepong, V.; Heboyan, A.; Yaqin Syed, A.U.; Anh Trinh, H.; Amornvit, P.P.; Rokaya, D. Recent advances in myoelectric control for finger prostheses for multiple finger loss. Appl. Sci. 2021, 11, 4464. [Google Scholar] [CrossRef]
- Mehra, P.; Dave, M.; Khan, A.; Tong, R.K.Y. Spatial mapping and feature analysis for individual finger movements using high density electromyography: Preliminary study. J. Image Graph. 2020, 8, 75–79. [Google Scholar] [CrossRef]
- Barsotti, M.; Dupan, S.; Vujaklija, I.; Dosen, S.; Frisoli, A.; Farina, D. Online finger control using high-density EMG and minimal training data for robotic applications. IEEE Robot. Autom. Lett. 2019, 4, 217–223. [Google Scholar] [CrossRef]
- Anam, K.; Al-Jumaily, A. Evaluation of extreme learning machine for classification of individual and combined finger movements using electromyography on amputees and non-amputees. Neural Netw. 2017, 85, 51–68. [Google Scholar] [CrossRef] [PubMed]
- Murciego, L.P.; Barsotti, M.; Frisoli, A. Synergy-based multi-fingers forces reconstruction and discrimination from forearm EMG. In Haptics: Science, Technology, and Applications; Prattichizzo, D., Shinoda, H., Tan, H., Ruffaldi, E., Frisoli, A., Eds.; EuroHaptics 2018. Lecture Notes in Computer Science 10894; Springer: Cham, Switzerland, 2018. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayvali, M.; Wickenkamp, I.; Ehrmann, A. Design, Construction and Tests of a Low-Cost Myoelectric Thumb. Technologies 2021, 9, 63. https://doi.org/10.3390/technologies9030063
Ayvali M, Wickenkamp I, Ehrmann A. Design, Construction and Tests of a Low-Cost Myoelectric Thumb. Technologies. 2021; 9(3):63. https://doi.org/10.3390/technologies9030063
Chicago/Turabian StyleAyvali, Murat, Inge Wickenkamp, and Andrea Ehrmann. 2021. "Design, Construction and Tests of a Low-Cost Myoelectric Thumb" Technologies 9, no. 3: 63. https://doi.org/10.3390/technologies9030063
APA StyleAyvali, M., Wickenkamp, I., & Ehrmann, A. (2021). Design, Construction and Tests of a Low-Cost Myoelectric Thumb. Technologies, 9(3), 63. https://doi.org/10.3390/technologies9030063