Advanced Solutions Aimed at the Monitoring of Falls and Human Activities for the Elderly Population




Abstract
1. Introduction
2. Falls and Human Activities Detection Techniques: A Brief Overview
2.1. Wearable Solutions
2.1.1. Customized Systems
2.1.2. Smartphone-Based Solutions
2.1.3. Non-Wearable Solutions
2.1.4. Hybrid System
2.1.5. Conclusive Remarks
3. Event Driven Methodologies for Fall Detection and Classification
3.1. The Event-Driven Classification Methodology
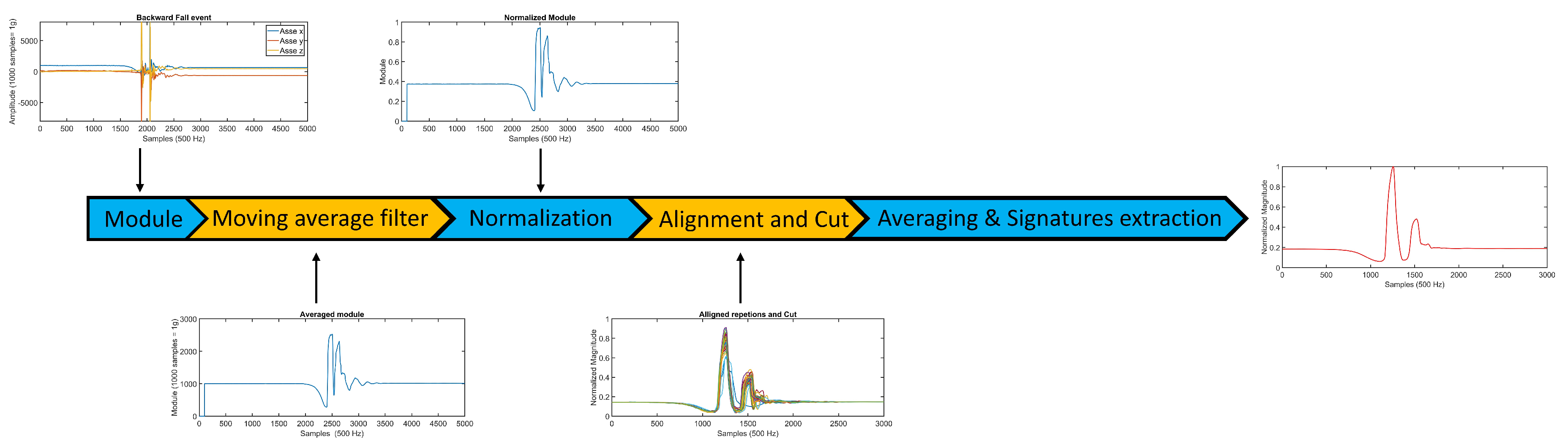
3.1.1. Signature: Definition and Building Process
- Module computation, whose equation is shown in (1).with n number of samples of the acquired signal.
- Low pass filtering by means of a moving average, whose equation is shown in (2).with:
- -
- n = number of samples of the acquired signal
- -
- = number of samples previous to i
- -
- = number of samples subsequent to i
- -
- Normalization, whose algorithm (Algorithm 1) is shown below.
Algorithm 1: Normalization algorithm 
- Alignment. The alignment algorithm is based on the time delay between patterns, estimated by computing the cross-correlation between signals. First the cross-correlation has been computed according the following Equation (3):with
- -
- n = number of acquired samples
- -
- = signature
- -
- = filtered and normalized acceleration module
- -
- r = sample number
- -
- = sampling time
consequently, the time instant where the biggest value of is found, has been used to shift one signal in order to align them. The algorithm compute the correlation within a time windows of 300 ms. - Averaging the aligned vectors.

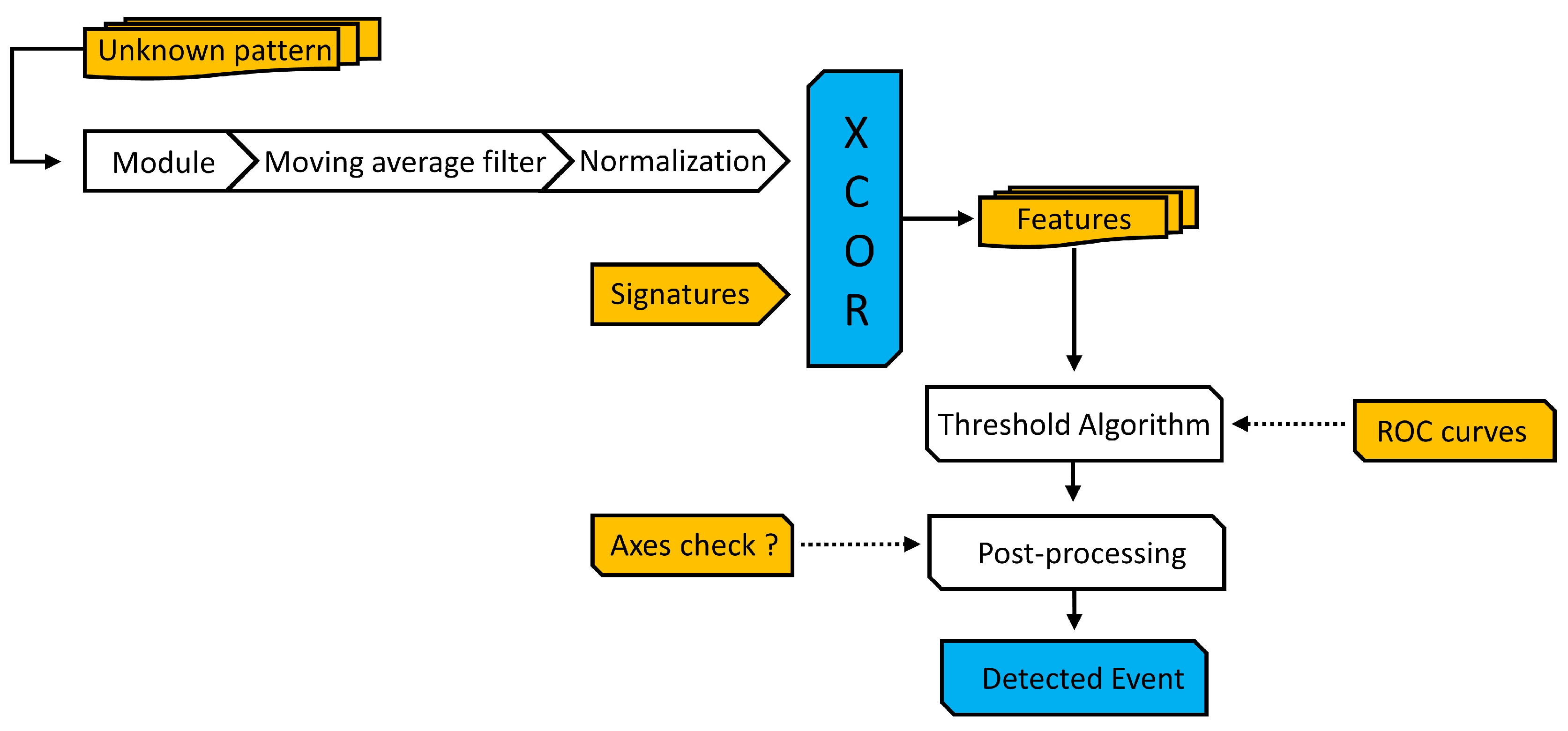
3.1.2. Pre-Processing of An Unknown Pattern and Features Generation
3.1.3. Classification Procedure
4. A Case of Study
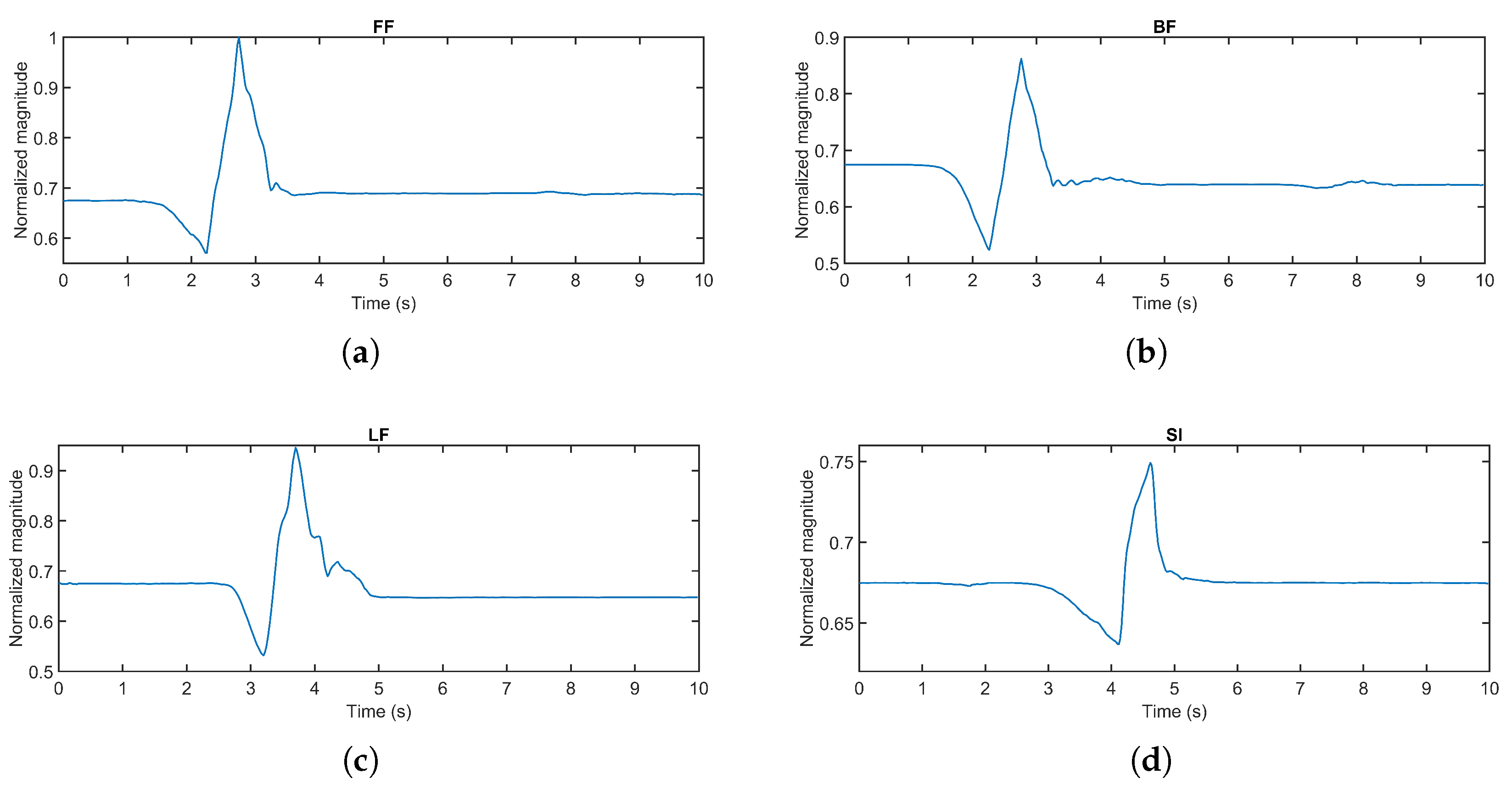
- Backward falls (FB) (50 repetitions);
- Forward falls (FF) (50 repetitions);
- Lateral falls (LF) (50 repetitions);
- Sitting events (SI) (50 repetitions).
5. The Assessment Procedure
- TP (true positive): events of type E correctly recognized as belonging to class E;
- FN (false negative): events of type E recognized as belonging to a class different than E;
- TN (true negative): events different from type E correctly recognized as belonging to a class different than E;
- FP (false positive): events different from type E recognized as belonging to class E;
- Sensitivity (): the capability of an algorithm to correctly identify TPs as such.
- Specificity (): the capability of the system to correctly identify TNs as such.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Overview of the UK Population; Office for National Statistics: Newport, UK, 2017.
- Istat.it. Available online: https://www.istat.it/ (accessed on 15 August 2019).
- Home-Eurostat. Available online: https://ec.europa.eu/eurostat (accessed on 15 August 2019).
- Ando, B. Instrumentation notes—Sensors that provide security for people with depressed receptors. IEEE Instru. Meas. Mag. 2006, 9, 56–61. [Google Scholar] [CrossRef]
- Ando, B.; Baglio, S.; Lombardo, C.O.; Marletta, V. A multisensor data-fusion approach for ADL and fall classification. IEEE Trans. Instrum. Meas. 2016, 65, 1960–1967. [Google Scholar] [CrossRef]
- Li, H.; Shrestha, A.; Fioranelli, F.; Le Kernec, J.; Heidari, H.; Pepa, M.; Cippitelli, E.; Gambi, E.; Spinsante, S. Multisensor data fusion for human activities classification and fall detection. Proc. IEEE Sens. 2017, 2017, 1–3. [Google Scholar] [CrossRef]
- Ando, B.; Baglio, S.; Marletta, V.; Crispino, R. A NeuroFuzzy approach for fall detection. In Proceedings of the 2017 International Conference on Engineering, Technology and Innovation (ICE/ITMC), Madeira Island, Portugal, 27–29 June 2017; pp. 1312–1316. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Marletta, V.; Pistorio, A. A RFID approach to help frail users in indoor orientation task. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 2–5. [Google Scholar]
- Andò, B.; Baglio, S.; Marletta, V.; Crispino, R.; Pistorio, A. A Measurement Strategy to Assess the Optimal Design of an RFID-Based Navigation Aid. IEEE Trans. Instrum. Meas. 2018, 68, 1–7. [Google Scholar] [CrossRef]
- Cippitelli, E.; Fioranelli, F.; Gambi, E.; Spinsante, S. Radar and RGB-Depth Sensors for Fall Detection: A Review. IEEE Sens. J. 2017, 17, 3585–3604. [Google Scholar] [CrossRef]
- Diraco, G.; Leone, A.; Siciliano, P. Radar Sensing Technology for Fall Detection Under Near Real-Life Conditions. In Proceedings of the 2nd IET International Conference on Technologies for Active and Assisted Living, London, UK, 24–25 October 2016; p. 5. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; La Malfa, S.; Marletta, V. A Sensing Architecture for Mutual User-Environment Awareness Case of Study: A Mobility Aid for the Visually Impaired. IEEE Sens. J. 2011, 11, 634–640. [Google Scholar] [CrossRef]
- Andò, B. A Smart Multisensor Approach to Assist Blind People in Specific Urban Navigation Tasks. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 592–594. [Google Scholar] [CrossRef] [PubMed]
- Andò, B.; Baglio, S.; Malfa, S.L.; Marletta, V. Innovative Smart Sensing Solutions for the Visually Impaired. In Handbook of Research on Personal Autonomy Technologies and Disability Informatics; IGI Global: Hershey, PA, USA, 2011; pp. 60–74. [Google Scholar]
- Cardinaux, F.; Bhowmik, D.; Abhayaratne, C.; Hawley, M.S. Video Based Technology for Ambient Assisted Living: A Review of the Literature. J. Ambient Intell. Smart Environ. 2011, 3, 253–269. [Google Scholar]
- König, A.; Crispim, C.F.; Derreumaux, A.; Bensadoun, G.; Petit, P.D.; Bremond, F.; David, R.; Verhey, F.; Aalten, P.; Robert, P. Validation of an Automatic Video Monitoring System for the Detection of Instrumental Activities of Daily Living in Dementia Patients. J. Alzheimer’s Dis. 2015, 44, 675–685. [Google Scholar] [CrossRef]
- Celler, B.; Earnshaw, W.; Ilsar, E.; Betbeder-Matibet, L.; Harris, M.; Clark, R.; Hesketh, T.; Lovell, N. Remote monitoring of health status of the elderly at home. A multidisciplinary project on aging at the University of New South Wales. Int. J. Bio-Med. Comput. 1995, 40, 147–155. [Google Scholar] [CrossRef]
- Andó, B.; Baglio, S.; Lombardo, C.O.; Marletta, V. An Event Polarized Paradigm for ADL Detection in AAL Context. IEEE Trans. Instrum. Meas. 2015, 64, 1814–1825. [Google Scholar] [CrossRef]
- Bruno, A.; Baglio, S.; Crispino, R.; L’Episcopo, L.; Marletta, V.; Branciforte, M.; Virzi, M.C. A smart inertial pattern for the SUMMIT IoT multi-platform. Lect. Notes Electr. Eng. 2018, 544, 311–319. [Google Scholar]
- Chaccour, K.; Darazi, R.; Hassani, A.H.E.; Andrès, E. From Fall Detection to Fall Prevention: A Generic Classification of Fall-Related Systems. IEEE Sens. J. 2017, 17, 812–822. [Google Scholar] [CrossRef]
- Rescio, G.; Leone, A.; Siciliano, P. Supervised Expert System for Wearable MEMS Accelerometer-Based Fall Detector. J. Sens. 2013, 2013, 1–11. [Google Scholar] [CrossRef]
- Panahandeh, G.; Mohammadiha, N.; Leijon, A.; Handel, P. Chest-mounted inertial measurement unit for pedestrian motion classification using continuous hidden Markov model. In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 991–995. [Google Scholar] [CrossRef]
- Leone, A.; Rescio, G.; Caroppo, A.; Siciliano, P. A Wearable EMG-based System Pre-fall Detector. Procedia Eng. 2015, 120, 455–458. [Google Scholar] [CrossRef]
- Rescio, G.; Leone, A.; Siciliano, P. Support Vector Machine for tri-axial accelerometer-based fall detector. In Proceedings of the 5th IEEE International Workshop on Advances in Sensors and Interfaces IWASI, Bari, Italy, 13–14 June 2013; pp. 25–30. [Google Scholar] [CrossRef]
- Dunkel, J.; Bruns, R.; Stipkovic, S. Event-based smartphone sensor processing for ambient assisted living. In Proceedings of the 2013 IEEE Eleventh International Symposium on Autonomous Decentralized Systems (ISADS), Mexico City, Mexico, 6–8 March 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Franco, C.; Fleury, A.; Gumery, P.Y.; Diot, B.; Demongeot, J.; Vuillerme, N. iBalance-ABF: A Smartphone-Based Audio-Biofeedback Balance System. IEEE Trans. Biomed. Eng. 2013, 60, 211–215. [Google Scholar] [CrossRef] [PubMed]
- Ketabdar, H.; Lyra, M. System and methodology for using mobile phones in live remote monitoring of physical activities. In Proceedings of the 2010 IEEE International Symposium on Technology and Society, Wollongong, NSW, Australia, 7–9 June 2010; pp. 350–356. [Google Scholar] [CrossRef]
- Tacconi, C.; Mellone, S.; Chiari, L. Smartphone-based applications for investigating falls and mobility. In Proceedings of the 2011 5th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, Dublin, Ireland, 23–26 May 2011; pp. 258–261. [Google Scholar] [CrossRef]
- Vo, Q.V.; Lee, G.; Choi, D. Fall Detection Based on Movement and Smart Phone Technology. In Proceedings of the 2012 IEEE RIVF International Conference on Computing & Communication Technologies, Research, Innovation, and Vision for the Future, Ho Chi Minh City, Vietnam, 27 Februry–1 March 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Otanasap, N. Pre-Impact Fall Detection Based on Wearable Device Using Dynamic Threshold Model. In Proceedings of the 2016 17th International Conference on Parallel and Distributed Computing, Applications and Technologies (PDCAT), Guangzhou, China, 16–18 December 2016; pp. 362–365. [Google Scholar] [CrossRef]
- Cates, B.; Sim, T.; Heo, H.M.; Kim, B.; Kim, H.; Mun, J.H. A Novel Detection Model and Its Optimal Features to Classify Falls from Low- and High-Acceleration Activities of Daily Life Using an Insole Sensor System. Sensors 2018, 18, 1227. [Google Scholar] [CrossRef]
- Sucerquia, A.; López, J.D.; Vargas-Bonilla, J.F. Real-Life/Real-Time Elderly Fall Detection with a Triaxial Accelerometer. Sensors 2018, 18, 1101. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.T.; Chan, H.L.; Hsu, M.H.; Lin, C.K.; Chao, P.K.; Chang, Y.J. Threshold-based fall detection using a hybrid of tri-axial accelerometer and gyroscope. Physiol. Meas. 2018, 39, 105002. [Google Scholar] [CrossRef] [PubMed]
- Igual, R.; Medrano, C.; Plaza, I. Challenges, issues and trends in fall detection systems. Biomed. Eng. Online 2013, 12, 66. [Google Scholar] [CrossRef]
- Shahzad, A.; Kim, K. FallDroid: An Automated Smart-Phone-Based Fall Detection System Using Multiple Kernel Learning. IEEE Trans. Ind. Inf. 2019, 15, 35–44. [Google Scholar] [CrossRef]
- Hsu, Y.; Chen, K.; Yang, J.; Jaw, F. Smartphone-based fall detection algorithm using feature extraction. In Proceedings of the 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15–17 October 2016; pp. 1535–1540. [Google Scholar] [CrossRef]
- Buzin Junior, C.L.; Adami, A.G. SDQI—Fall Detection System for Elderly. IEEE Lat. Am. Trans. 2018, 16, 1084–1090. [Google Scholar] [CrossRef]
- Cheffena, M. Fall Detection Using Smartphone Audio Features. IEEE J. Biomed. Health Inform. 2016, 20, 1073–1080. [Google Scholar] [CrossRef] [PubMed]
- Turaga, P.; Chellappa, R.; Subrahmanian, V.S.; Udrea, O. Machine Recognition of Human Activities: A Survey. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1473–1488. [Google Scholar] [CrossRef]
- Messing, R.; Pal, C.; Kautz, H. Activity recognition using the velocity histories of tracked keypoints. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 104–111. [Google Scholar] [CrossRef]
- Lei, J.; Ren, X.; Fox, D. Fine-grained Kitchen Activity Recognition Using RGB-D. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing; ACM: New York, NY, USA, 2012; pp. 208–211. [Google Scholar] [CrossRef]
- Rohrbach, M.; Amin, S.; Andriluka, M.; Schiele, B. A database for fine grained activity detection of cooking activities. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1194–1201. [Google Scholar] [CrossRef]
- As’ari, M.A.; Sheikh, U.U. Vision Based Assistive Technology for People with Dementia Performing Activities of Daily Living (ADLs)—an Overview. Proc. SPIE Int. Soc. Opt. Eng. 2012, 8334, 100. [Google Scholar] [CrossRef]
- Harrou, F.; Zerrouki, N.; Sun, Y.; Houacine, A. Vision-based fall detection system for improving safety of elderly people. IEEE Instrum. Meas. Mag. 2017, 20, 49–55. [Google Scholar] [CrossRef]
- Núñez-Marcos, A.; Azkune, G.; Arganda-Carreras, I. Vision-Based Fall Detection with Convolutional Neural Networks. Wirel. Commun. Mob. Comput. 2017, 2017, 1–16. [Google Scholar] [CrossRef]
- Hein, A.; Kirste, T. A Hybrid Approach for Recognizing ADLs and Care Activities Using Inertial Sensors and RFID. In Universal Access in Human-Computer Interaction; Intelligent and Ubiquitous Interaction, Environments; Stephanidis, C., Ed.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 178–188. [Google Scholar]
- Cippitelli, E.; Gasparrini, S.; Gambi, E.; Spinsante, S.; Wåhslény, J.; Orhany, I.; Lindhy, T. Time synchronization and data fusion for RGB-Depth cameras and inertial sensors in AAL applications. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 265–270. [Google Scholar] [CrossRef]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| User | User | User | User | User | User | User | User | User | User | |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Gender | Male | Male | Female | Male | Male | Female | Male | Male | Female | Male |
| Age [year] | 36 | 25 | 40 | 36 | 31 | 44 | 40 | 36 | 39 | 42 |
| Height [m] | 1.75 | 1.85 | 1.62 | 1.78 | 1.66 | 1.54 | 1.81 | 1.65 | 1.58 | 1.92 |
| Weight [Kg] | 90 | 82 | 54 | 85 | 72 | 52 | 81 | 63 | 60 | 105 |
| (a) Correlation Indexes for the FF Event | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0.97 | 0.88 | 0.87 | 0.69 |
| 2 | 0.95 | 0.90 | 0.87 | 0.74 |
| 3 | 0.93 | 0.94 | 0.89 | 0.85 |
| 4 | 0.96 | 0.89 | 0.88 | 0.73 |
| 5 | 0.96 | 0.88 | 0.87 | 0.70 |
| 6 | 0.93 | 0.93 | 0.88 | 0.82 |
| 7 | 0.94 | 0.84 | 0.84 | 0.65 |
| 8 | 0.94 | 0.85 | 0.85 | 0.66 |
| 9 | 0.97 | 0.93 | 0.89 | 0.77 |
| 10 | 0.95 | 0.92 | 0.86 | 0.73 |
| (b) Correlation Indexes for the BF Event | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0.82 | 0.92 | 0.89 | 0.81 |
| 2 | 0.85 | 0.94 | 0.87 | 0.83 |
| 3 | 0.90 | 0.99 | 0.88 | 0.81 |
| 4 | 0.87 | 0.93 | 0.87 | 0.84 |
| 5 | 0.92 | 0.98 | 0.89 | 0.87 |
| 6 | 0.91 | 0.98 | 0.89 | 0.87 |
| 7 | 0.93 | 0.98 | 0.90 | 0.87 |
| 8 | 0.90 | 0.99 | 0.88 | 0.81 |
| 9 | 0.88 | 0.94 | 0.87 | 0.82 |
| 10 | 0.84 | 0.93 | 0.88 | 0.82 |
| (c) Correlation Indexes for the LF Event | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0.89 | 0.88 | 0.95 | 0.84 |
| 2 | 0.87 | 0.89 | 0.97 | 0.85 |
| 3 | 0.88 | 0.89 | 0.97 | 0.85 |
| 4 | 0.89 | 0.89 | 0.98 | 0.84 |
| 5 | 0.88 | 0.91 | 0.98 | 0.84 |
| 6 | 0.84 | 0.89 | 0.92 | 0.85 |
| 7 | 0.85 | 0.89 | 0.98 | 0.87 |
| 8 | 0.84 | 0.90 | 0.96 | 0.86 |
| 9 | 0.87 | 0.91 | 0.97 | 0.86 |
| 10 | 0.86 | 0.91 | 0.92 | 0.84 |
| (d) Correlation Indexes for the SI Event | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0.76 | 0.95 | 0.84 | 0.99 |
| 2 | 0.76 | 0.91 | 0.83 | 0.98 |
| 3 | 0.75 | 0.91 | 0.85 | 0.99 |
| 4 | 0.75 | 0.91 | 0.85 | 0.99 |
| 5 | 0.76 | 0.95 | 0.84 | 0.99 |
| 6 | 0.76 | 0.92 | 0.85 | 0.99 |
| 7 | 0.76 | 0.92 | 0.86 | 0.99 |
| 8 | 0.76 | 0.91 | 0.83 | 0.99 |
| 9 | 0.75 | 0.91 | 0.83 | 0.99 |
| 10 | 0.77 | 0.95 | 0.84 | 0.99 |
| FF | BF | LF | SI |
|---|---|---|---|
| 0.94 | 0.95 | 0.93 | 0.88 |
| (a) FF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | 0 |
| 4 | 1 | 0 | 0 | 0 |
| 5 | 1 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0 | 0 |
| 7 | 1 | 0 | 0 | 0 |
| 8 | 1 | 0 | 0 | 0 |
| 9 | 1 | 0 | 0 | 0 |
| 10 | 1 | 0 | 0 | 0 |
| (b) BF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 0 | 0 | 0 |
| 5 | 0 | 1 | 0 | 0 |
| 6 | 0 | 1 | 0 | 0 |
| 7 | 0 | 1 | 0 | 0 |
| 8 | 0 | 1 | 0 | 0 |
| 9 | 0 | 0 | 0 | 0 |
| 10 | 0 | 0 | 0 | 0 |
| (c) LF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 0 | 1 | 0 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 0 | 0 |
| 7 | 0 | 0 | 1 | 0 |
| 8 | 0 | 0 | 1 | 0 |
| 9 | 0 | 0 | 1 | 0 |
| 10 | 0 | 0 | 0 | 0 |
| (d) SI Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 1 | 0 | 1 |
| 2 | 0 | 0 | 0 | 1 |
| 3 | 0 | 0 | 0 | 1 |
| 4 | 0 | 0 | 0 | 1 |
| 5 | 0 | 1 | 0 | 1 |
| 6 | 0 | 0 | 0 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 0 | 0 | 0 | 1 |
| 9 | 0 | 0 | 0 | 1 |
| 10 | 0 | 1 | 0 | 1 |
| (a) FF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 0 |
| 3 | 1 | 0 | 0 | 0 |
| 4 | 1 | 0 | 0 | 0 |
| 5 | 1 | 0 | 0 | 0 |
| 6 | 1 | 0 | 0 | 0 |
| 7 | 1 | 0 | 0 | 0 |
| 8 | 1 | 0 | 0 | 0 |
| 9 | 1 | 0 | 0 | 0 |
| 10 | 1 | 0 | 0 | 0 |
| (b) BF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 1 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 0 | 0 |
| 5 | 0 | 1 | 0 | 0 |
| 6 | 0 | 1 | 0 | 0 |
| 7 | 0 | 1 | 0 | 0 |
| 8 | 0 | 1 | 0 | 0 |
| 9 | 0 | 1 | 0 | 0 |
| 10 | 0 | 0 | 0 | 0 |
| (c) LF Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 0 | 1 | 0 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 0 |
| 7 | 0 | 0 | 1 | 0 |
| 8 | 0 | 0 | 1 | 0 |
| 9 | 0 | 0 | 1 | 0 |
| 10 | 0 | 0 | 1 | 0 |
| (d) SI Events | ||||
| Repetition | FF | BF | LF | SI |
| 1 | 0 | 0 | 0 | 1 |
| 2 | 0 | 0 | 0 | 1 |
| 3 | 0 | 0 | 0 | 1 |
| 4 | 0 | 0 | 0 | 1 |
| 5 | 0 | 0 | 0 | 1 |
| 6 | 0 | 0 | 0 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 0 | 0 | 0 | 1 |
| 9 | 0 | 0 | 0 | 1 |
| 10 | 0 | 0 | 0 | 1 |
| Algorithm | Index | FF | BF | LF | SI | Average |
|---|---|---|---|---|---|---|
| TA | 1 | 0.50 | 0.76 | 1 | 0.81 | |
| 0.97 | 1 | 1 | 0.72 | 0.92 | ||
| ATA | 1 | 0.89 | 1 | 1 | 0.97 | |
| 0.97 | 1 | 1 | 1 | 0.99 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andò, B.; Baglio, S.; Castorina, S.; Crispino, R.; Marletta, V. Advanced Solutions Aimed at the Monitoring of Falls and Human Activities for the Elderly Population. Technologies 2019, 7, 59. https://doi.org/10.3390/technologies7030059
Andò B, Baglio S, Castorina S, Crispino R, Marletta V. Advanced Solutions Aimed at the Monitoring of Falls and Human Activities for the Elderly Population. Technologies. 2019; 7(3):59. https://doi.org/10.3390/technologies7030059
Chicago/Turabian StyleAndò, Bruno, Salvatore Baglio, Salvatore Castorina, Ruben Crispino, and Vincenzo Marletta. 2019. "Advanced Solutions Aimed at the Monitoring of Falls and Human Activities for the Elderly Population" Technologies 7, no. 3: 59. https://doi.org/10.3390/technologies7030059
APA StyleAndò, B., Baglio, S., Castorina, S., Crispino, R., & Marletta, V. (2019). Advanced Solutions Aimed at the Monitoring of Falls and Human Activities for the Elderly Population. Technologies, 7(3), 59. https://doi.org/10.3390/technologies7030059