Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Haptic Device Using MR Fluid Containing Iron Nanoparticles
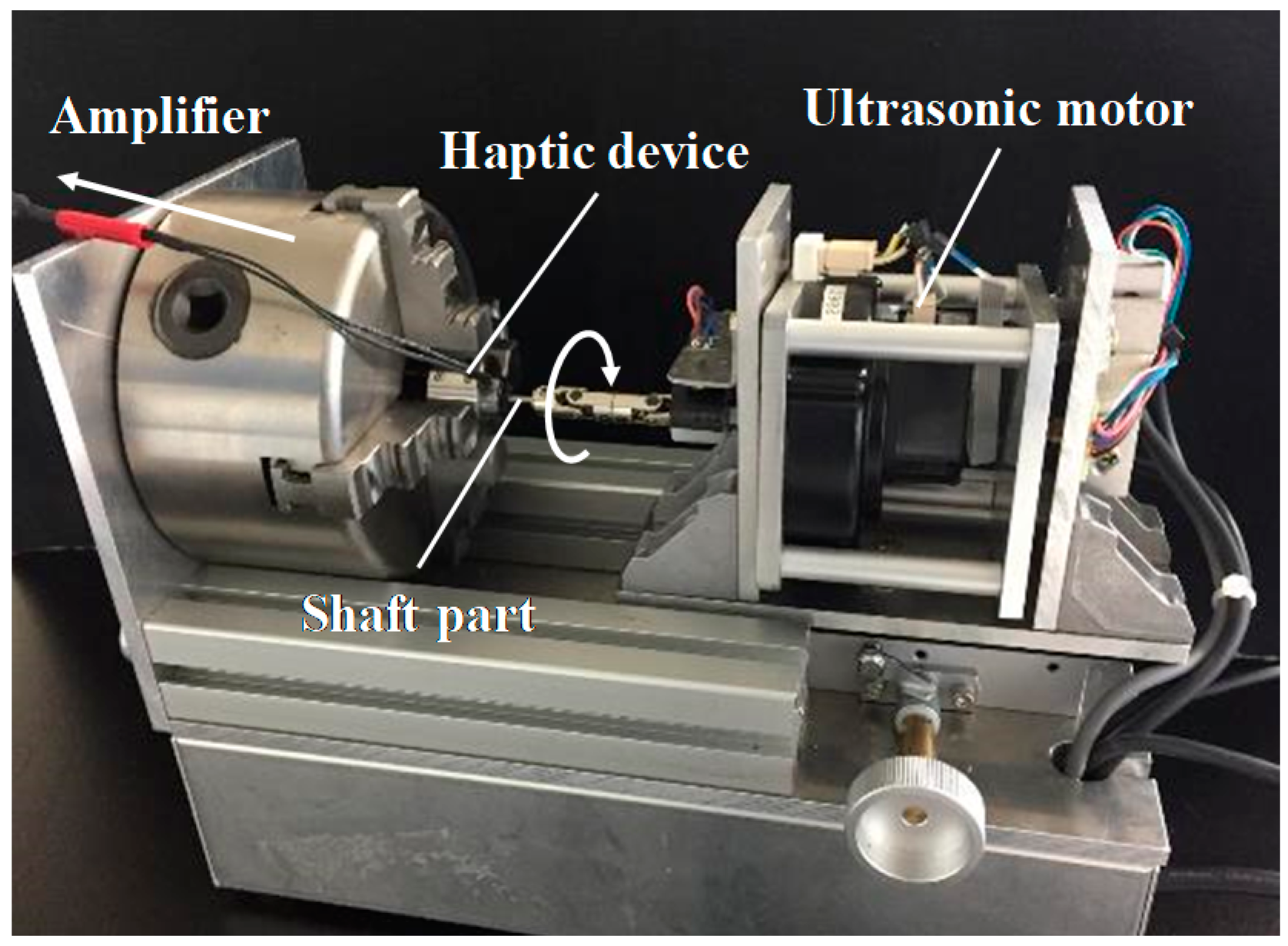
2.2. Torque Evaluations
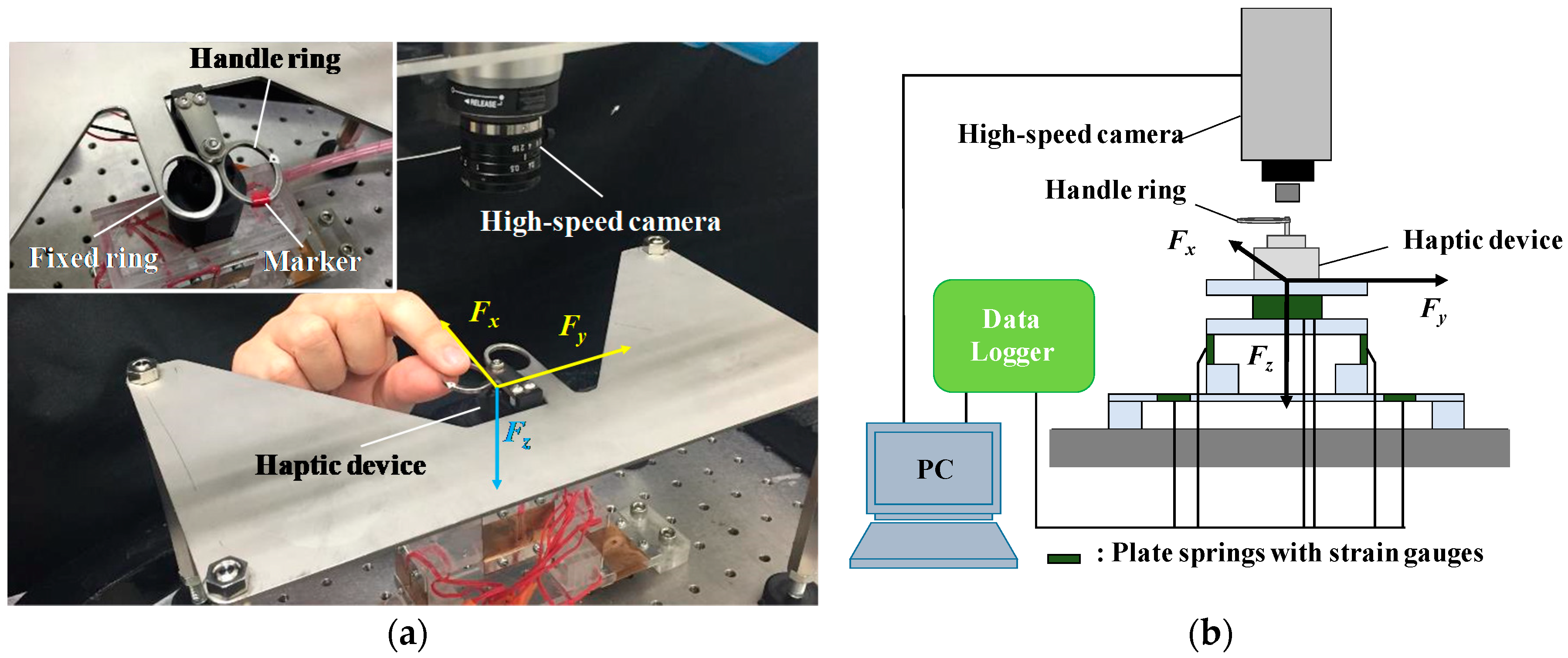
2.3. Mechanical Evaluation Tests in Operating a Scissors-Type Device
3. Results and Discussions
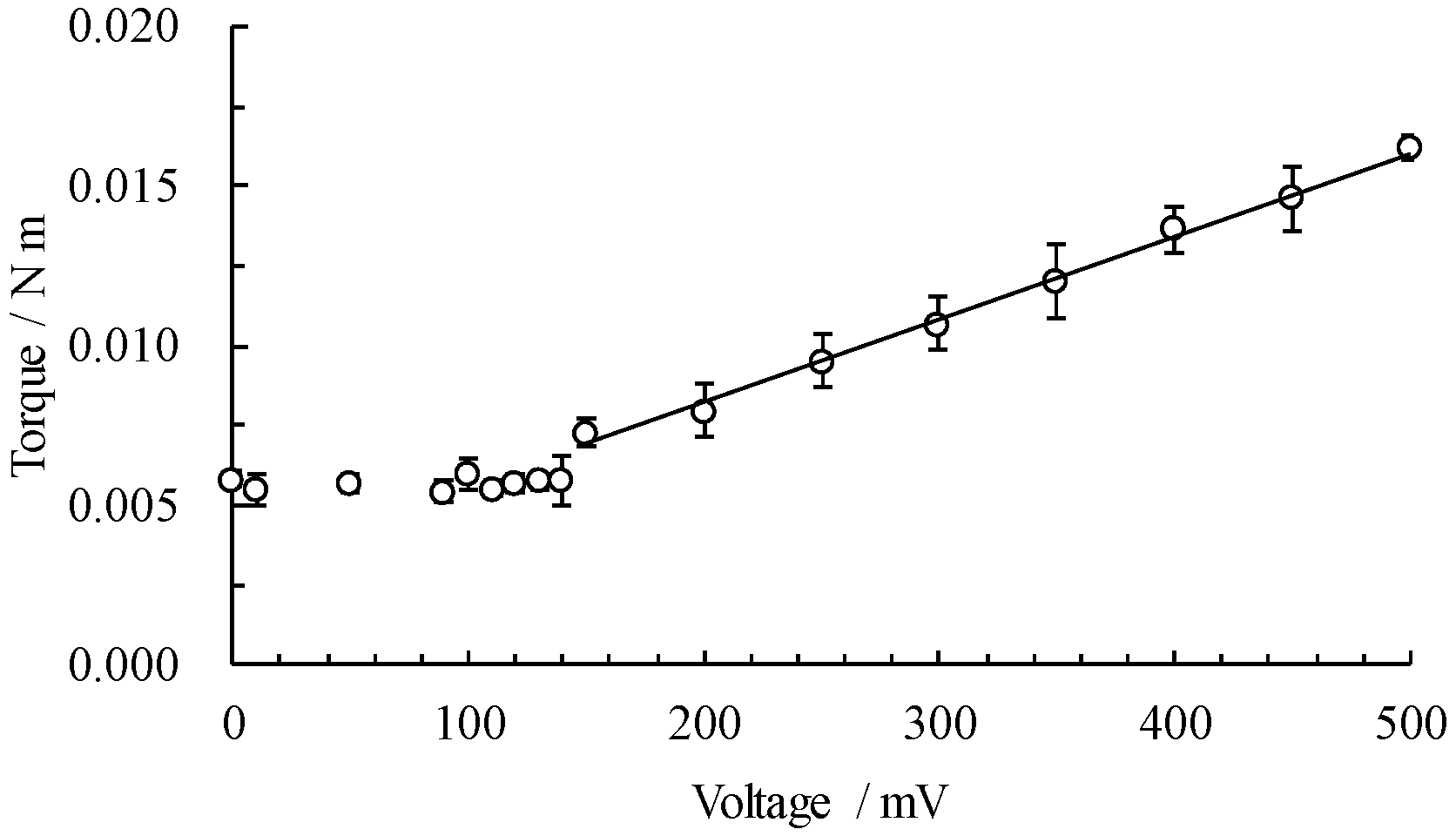
3.1. Relation between the Applied Voltage and Torque
3.2. Evaluations of the Torque Response Speed
3.3. Tactile Display of the Grasping/Cutting Processes
- One-step increase pattern: When the electric voltage increased to 500 mV in 0.63 s, the torque reached 0.013 N m. When closing the handle, the tangential force slowly increased to 0.4 N in 0.5 s.
- Two-step increase pattern: When the electric voltage increased to 310 mV in 0.04 s and then to 500 mV in 0.23 s, the torque increased to 0.010 N m in 0.14 s and then to 0.013 N m in 0.34 s. The tangential force increased slowly similar to the one-step increase pattern, and it reached 0.6 N in 0.5 s.
- Double peak pattern: When the voltage increased and decreased to 500 mV in 0.26 s, 27 mV in 0.79 s, 462 mV in 0.99 s, and 27 mV in 1.00 s, the torque increased and decreased to 0.013 N m in 0.29 s, 0.005 N m in 0.81 s, 0.010 N m in 0.98 s, and 0.005 N m in 1.08 s, respectively. When closing the handle, the tangential force increased from 0.3 to 0.8 N in 0.8 s and decreased from 0.8 to 0.3 N in 1.3 s. When opening the handle, the force increased to 0.8 N in 1.5 s and rapidly decreased to 0.3 N in 1.52 s.
- Drastic decrease pattern: When the voltage increased and decreased to 417 mV in 0.77 s, 0 mV in 0.79 s, and 500 mV in 0.80 s, the torque also increased and decreased to 0.010 N m in 0.73 s, 0.009 N m in 0.78 s, and 0.013 N m in 0.92 s. When closing the handle, the force increased from 0.2 to 0.6 N in 1.0 s, decreased to 0.5 N in 1.05 s, and increased to 0.7 N again in 1.09 s.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Berlinger, N.T. Robotic surgery—Squeezing into tight places. N. Engl. J. Med. 2006, 354, 2099–2101. [Google Scholar] [CrossRef] [PubMed]
- Sung, G.T.; Gill, I.S. Robotic laparoscopic surgery: A comparison of the da Vinci and Zeus systems. Urology 2001, 58, 893–898. [Google Scholar] [CrossRef]
- Song, J.; Kang, W.H.; Oh, S.J.; Hyung, W.J.; Choi, S.H.; Noh, S.H. Role of robotic gastrectomy using da Vinci system compared with laparoscopic gastrectomy: Initial experience of 20 consecutive cases. Surg. Endosc. 2009, 23, 1204–1211. [Google Scholar] [CrossRef] [PubMed]
- Tsuda, S.; Oleynikov, D.; Gould, J.; Azagury, D.; Sandler, B.; Hutter, M.; Ross, S.; Haas, E.; Brody, F.; Satava, R. SAGES TAVAC safety and effectiveness analysis: Da Vinci® Surgical System (Intuitive Surgical, Sunnyvale, CA). Surg. Endosc. 2015, 29, 2873–2884. [Google Scholar] [CrossRef] [PubMed]
- Sergeeva, A.; Marleen, H.; Samer, F. Transforming work practices of operating room teams: The case of the Da Vinci robot. In Proceedings of the 36th International Conference on Information Systems, Fort Worth, TX, USA, 20–22 September 2015; pp. 1–10. [Google Scholar]
- Klatzky, R.L.; Lederman, S.J.; Metzger, V.A. Identifying objects by touch: An “expert system”. Percept. Psychophys. 1985, 37, 299–302. [Google Scholar] [CrossRef] [PubMed]
- Voisin, J.; Lamarre, Y.; Chapman, C.E. Haptic discrimination of object shape in humans: Contribution of cutaneous and proprioceptive inputs. Exp. Brain Res. 2002, 145, 251–260. [Google Scholar] [CrossRef] [PubMed]
- Jones, L.A.; Piateski, E. Contribution of tactile feedback from the hand to the perception of force. Exp. Brain Res. 2006, 168, 298–302. [Google Scholar] [CrossRef] [PubMed]
- Girod, S.; Schvartzman, S.C.; Gaudilliere, D.; Salisbury, K.; Silva, R. Haptic feedback improves surgeons’ user experience and fracture reduction in facial trauma simulation. J. Rehabil. Res. Dev. 2016, 53, 561–570. [Google Scholar] [CrossRef] [PubMed]
- Scilingo, E.P.; Bicchi, A.; Rossi, D.D.; Scotto, A. A magnetorheological fluid as a haptic display to replicate perceived biological tissues compliance. In Proceedings of the 1st Annual International IEEE EBMS Special Topic Conference on Microtechnologies in Medicine and Biology, Lyon, France, 12–14 October 2000; pp. 229–233. [Google Scholar]
- Ahmadkhanlou, F.; Washington, F.N.; Bechtel, S.E. Modeling and control of single and two degree of freedom magnetorheological fluid-based haptic systems for telerobotic surgery. J. Intell. Mater. Syst. Struct. 2009, 20, 1171–1186. [Google Scholar] [CrossRef]
- Oh, J.S.; Kim, J.K.; Lee, S.R.; Choi, S.B.; Song, B.K. Design of tactile device for medical application using magnetorheological fluid. J. Phys. Conf. Ser. 2013, 412, 012047. [Google Scholar] [CrossRef]
- Kameyama, T.; Tsujita, T.; Konno, A.; Jiang, X.; Abiko, S.; Uchiyama, M. Displaying Cutting Force of Soft Tissue Using MR Fluid for Surgical Simulators. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; pp. 283–288. [Google Scholar]
- Yu, S.; Guo, S.; Zhang, L.; Yin, X. MR Fluid Interface of Endovascular Catheterization Based on Haptic Sensation. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; Volume 1, pp. 454–458. [Google Scholar]
- Kim, S.; Kim, P.; Park, C.Y.; Choi, S.B. A new tactile device using magneto-rheological sponge cells for medical applications: Experimental investigation. Sens. Actuators A Phys. 2016, 239, 61–69. [Google Scholar] [CrossRef]
- Song, B.K.; Oh, J.S.; Kim, P.; Kim, S.; Choi, S.B. Repulsive torque control of a robot-assisted surgery system using a magnetorheological haptic master. J. Syst. Control Eng. 2016, 230, 1116–1125. [Google Scholar] [CrossRef]
- Kim, P.; Kim, S.; Park, Y.D.; Choi, S.B. Force modeling for incisions into various tissues with MRF haptic master. Smart Mater. Struct. 2016, 25, 035008. [Google Scholar] [CrossRef]
- Carlson, J.D.; Jolly, M.R. MR fluid, foam and elastomer devices. Mechatronics 2000, 10, 555–569. [Google Scholar] [CrossRef]
- Waga, M.; Aita, Y.; Noma, J.; Nonomura, Y. Tactile Feels in Grasping/Cutting Processes with Scissors. Technologies 2018, 6, 66. [Google Scholar] [CrossRef]
- Guerrero-Sanchez, C.; Lara-Ceniceros, T.; Jimenez-Regalado, E.; Raşa, M.; Schubert, U.S. Magnetorheological fluids based on ionic liquids. Adv. Mater. 2007, 19, 1740–1747. [Google Scholar] [CrossRef]
- López-López, M.T.; Gómez-Ramírez, A.; Durán, J.D.; González-Caballero, F. Preparation and characterization of iron-based magnetorheological fluids stabilized by addition of organoclay particles. Langmuir 2008, 24, 7076–7084. [Google Scholar] [CrossRef] [PubMed]
- Noma, J.; Abe, H.; Kikuchi, T.; Furusho, J.; Naito, M. Magnetorheology of colloidal dispersion containing Fe nanoparticles synthesized by arc-plasma method. J. Magn. Magn. Mater. 2010, 322, 1868–1871. [Google Scholar] [CrossRef]
- Ashtiani, M.; Hashemabadi, S.H.; Ghaffari, A. A review on the magnetorheological fluid preparation and stabilization. J. Magn. Magn. Mater. 2015, 374, 716–730. [Google Scholar] [CrossRef]
- Rabbani, Y.; Ashtiani, M.; Hashemabadi, S.H. An experimental study on the effects of temperature and magnetic field strength on the magnetorheological fluid stability and MR effect. Soft Matter 2015, 11, 4453–4460. [Google Scholar] [CrossRef] [PubMed]
- Nonomura, Y.; Fujii, T.; Arashi, Y.; Miura, T.; Maeno, T.; Tashiro, K.; Kamikawa, Y.; Monchi, R. Tactile impression and friction of water on human skin. Colloids Surf. B 2009, 69, 264–267. [Google Scholar] [CrossRef] [PubMed]
- Nonomura, Y.; Miura, T.; Miyashita, T.; Asao, Y.; Shirado, H.; Makino, Y.; Maeno, T. How to identify water from thickener aqueous solutions by touch. J. R. Soc. Interface 2012, 9, 1216–1223. [Google Scholar] [CrossRef] [PubMed]
- Nonomura, Y.; Saito, R.; Takahashi, A. Friction at fingertip surface during water contact process. Bull. Chem. Soc. Jpn. 2015, 88, 949–954. [Google Scholar] [CrossRef]
- Kwon, D.S.; Woo, K.Y.; Song, S.K.; Kim, W.S.; Cho, H.S. Microsurgical Telerobot System. In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems, Victoria, BC, Canada, 17 October 1998; pp. 945–950. [Google Scholar]
- Takesue, N.; Furusho, J.; Kiyota, Y. Fast response MR-fluid actuator. J. Soc. Mech. Eng. Int. J. Ser. C 2004, 47, 783–787. [Google Scholar] [CrossRef]
- Kikuchi, T.; Noma, J.; Akaiwa, S.; Ueshima, Y. Response time of magnetorheological fluid–based haptic device. J. Intell. Mater. Syst. Struct. 2016, 27, 859–865. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Waga, M.; Aita, Y.; Noma, J.; Kikuchi, T.; Nonomura, Y. Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles. Technologies 2019, 7, 26. https://doi.org/10.3390/technologies7010026
Waga M, Aita Y, Noma J, Kikuchi T, Nonomura Y. Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles. Technologies. 2019; 7(1):26. https://doi.org/10.3390/technologies7010026
Chicago/Turabian StyleWaga, Mioto, Yuuki Aita, Junichi Noma, Takehito Kikuchi, and Yoshimune Nonomura. 2019. "Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles" Technologies 7, no. 1: 26. https://doi.org/10.3390/technologies7010026
APA StyleWaga, M., Aita, Y., Noma, J., Kikuchi, T., & Nonomura, Y. (2019). Scissors-Type Haptic Device Using Magnetorheological Fluid Containing Iron Nanoparticles. Technologies, 7(1), 26. https://doi.org/10.3390/technologies7010026