A Conceptual Framework for Implementing a WSN Based Cattle Recovery System in Case of Cattle Rustling in Kenya

Abstract
1. Introduction
2. Animal Identification and Tracking
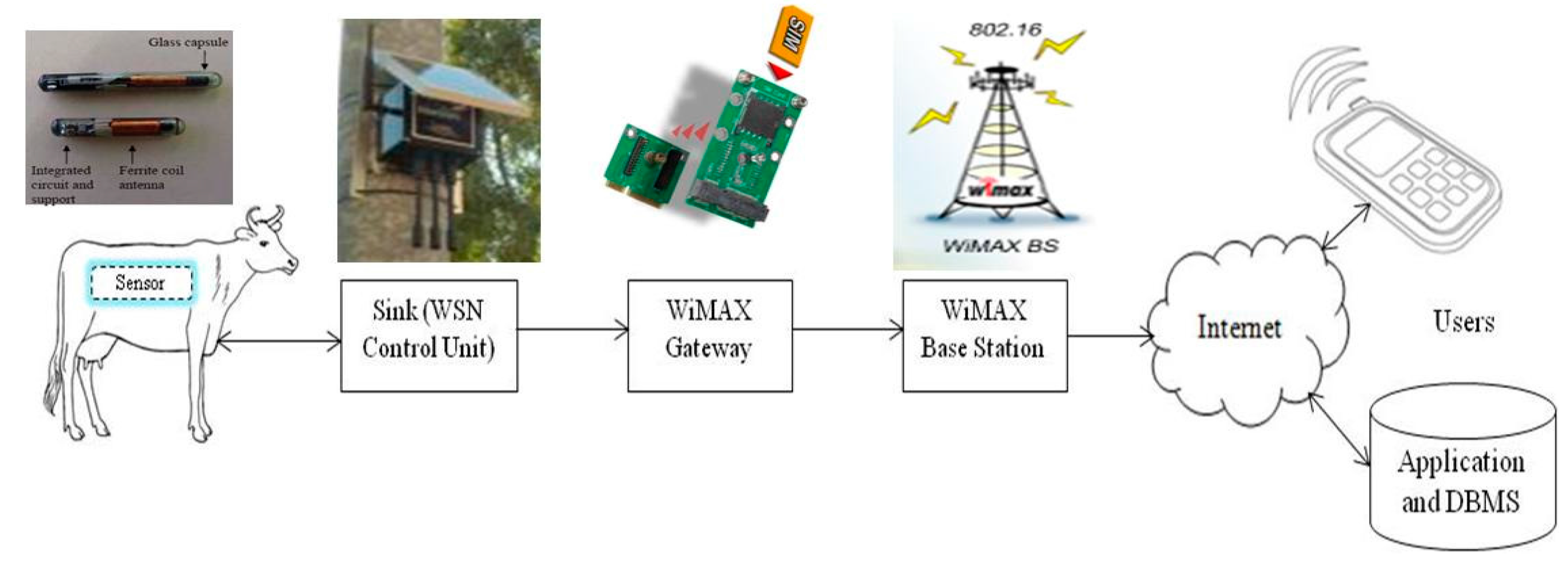
3. Proposed Framework
3.1. Mobile Embedded Sensor Node
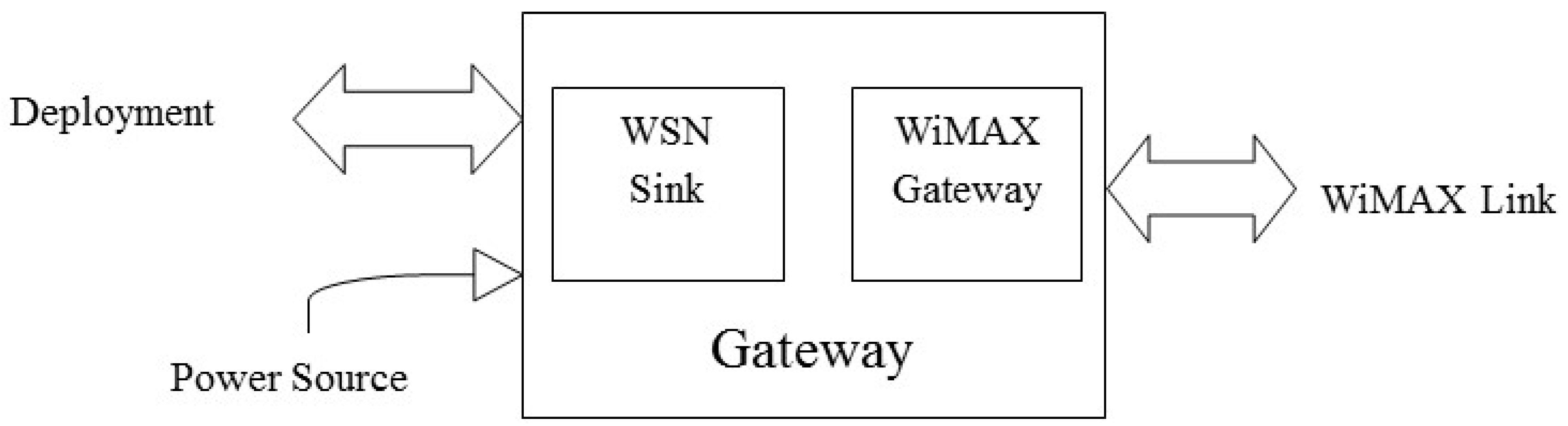
3.2. Gateway
3.3. System Operations
3.4. Animal Sensor Localization
3.4.1. Initialization Phase: To Obtain the Minimum Number of Hops between the MES and Each WCU
- Initialize WCU
- For each WCU
- Send “Awake” plus “Hello” messages to all MES in the rangeFor MES set M = {m1, m2, m3, …, mn}Initialize MESSet MES status = “active”The format of WCU “Hello” message is {wsid, xi, yi, hop count}
- MES: Ignore higher hop count values from the same WCU, storing only the minimum hop count to each WCU.
- MES: Increase the hop counter by 1 and pass the message to the neighbor.
- Repeat until each MES has received communication from all the WCUs in which it is within their radio ranges and all the MES in the network have the minimal hop count to every WCU.
- MES: Update HC_Table with (Xi, Yi, hopi) where (Xi, Yi,) is the coordinate of WCUi and hopi is the minimum number of hops between the MES and the WCUi.
3.4.2. Computation Phase: To Calculate Estimated Distance between MES and WCU
- The WCU uses the minimum hop count values to other WCUs to estimate the average size of one hop within the network using Equation (1).where xi, yi and xj, yj are the beacon coordinates of WCUs i and j, h is the minimum number of hops between beacon WCUs i and j.
- WCU broadcasts its average hop size to the network using controlled flooding to the entire network.
- Each MES receives the hop sizes from the nearest WCUs and saves the first received message and transmits it to the neighbors.
3.4.3. Localization Phase: Coordinate Calculation
3.5. Localization Accuracy
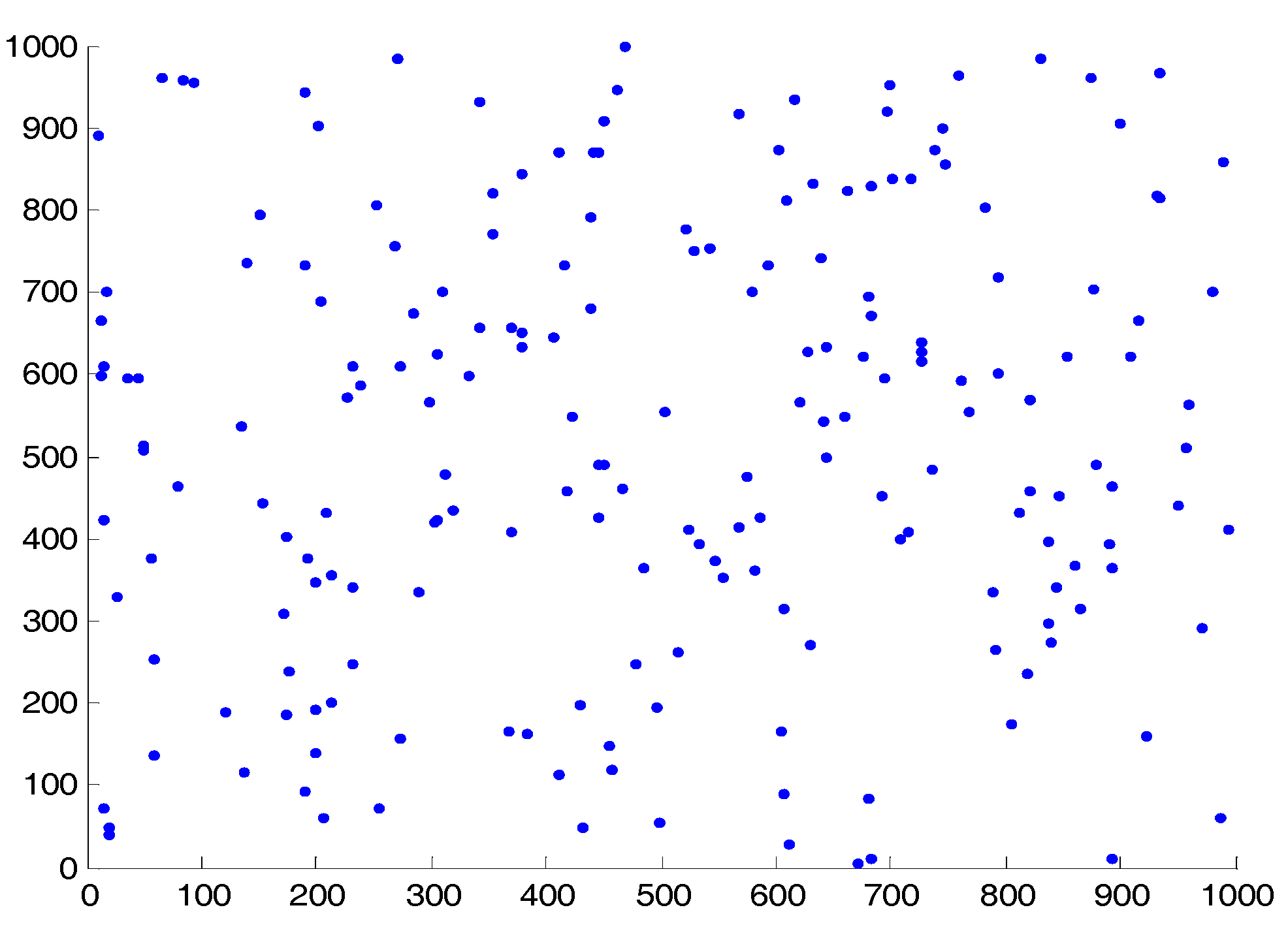
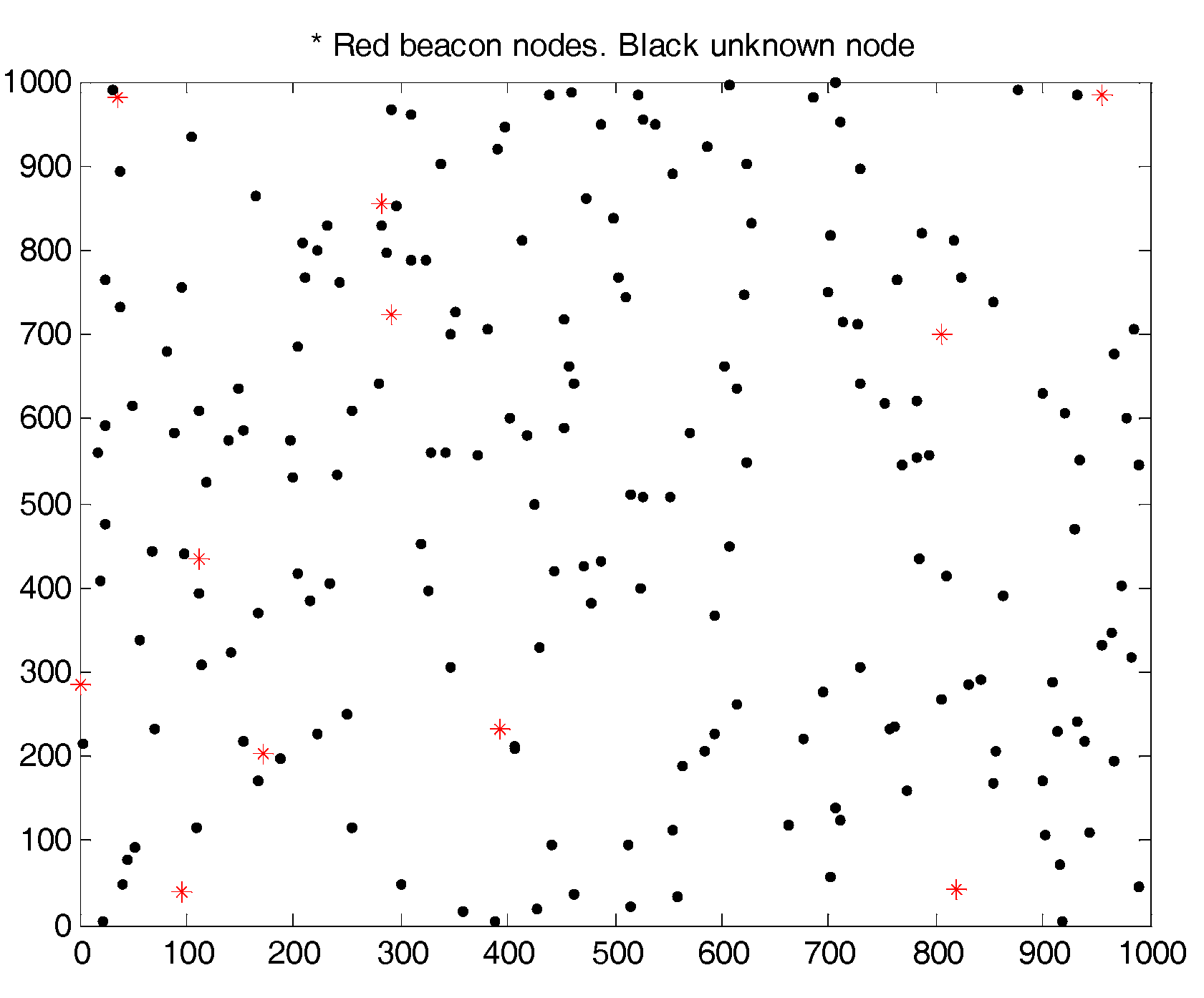
4. Simulation and Results
5. Conclusions and Future Work
Acknowledgments
Conflicts of Interest
References
- Momanyi, B. Kenyan Cops Killed in Ambush Hit Shocking 42. Available online: http://www.capitalfm.co.ke/news/2012/11/kenyan-cops-killed-in-ambush-hit-shocking-42/ (accessed on 21 October 2013).
- Sikka, P.; Corke, P.; Overs, L. Wireless sensor devices for animal tracking and control. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004. [Google Scholar]
- Butler, Z.; Corke, P.; Peterson, R.; Rus, D. Virtual fences for controlling cows. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4429–4436. [Google Scholar]
- Frost, A.R.; Schofield, C.P.; Beaulah, S.A.; Mottram, T.T.; Lines, J.A.; Wathes, C.M. A review of livestock monitoring and the need for integrated systems. Comput. Electron. Agric. 1997, 17, 139–159. [Google Scholar] [CrossRef]
- Tomkins, N.; Filmer, M. GPS tracking to boost sustainability. Farming Ahead 2007, 185, 68–71. [Google Scholar]
- Raizman, E.A.; Rasmussen, H.B.; King, L.E.; Ihwagi, F.W.; Douglas-Hamilton, I. Feasibility study on the spatial and temporal movement of Samburu’s cattle and wildlife in Kenya using GPS radio-tracking, remote sensing and GIS. Prev. Vet. Med. 2013, 111, 76–80. [Google Scholar] [CrossRef] [PubMed]
- Ribo, O.; Korn, C.; Meloni, U.; Cropper, M.; de Winne, P.; Cuypers, M. IDEA: A large-scale project on electronic identification of livestock. Rev. Sci. Tech. OIE 2001, 20, 426–436. [Google Scholar] [CrossRef]
- Moreki, J.C.; Ndubo, N.S.; Ditshupo, T.; Ntesang, J.B. Cattle Identification and Traceability in Botswana. J. Anim. Sci. Adv. 2012, 2, 925–933. [Google Scholar]
- Bowling, M.B.; Pendell, D.L.; Morris, D.L.; Yoon, Y.; Katoh, K.; Belk, K.E.; Smith, G.C. Review: Identification and Traceability of Cattle in Selected Countries Outside of North America. Prof. Anim. Sci. 2008, 24, 287–294. [Google Scholar] [CrossRef]
- Erden, H.; Kaya, İ.A.; Çamaşircioğlu, E. Livestock monitoring system. In Proceedings of the Fourth International Conference on Agro-Geoinformatics, Istanbul, Turkey, 20–24 July 2015; pp. 73–76. [Google Scholar]
- Bhavsar, A.R.; Shah, D.J.; Arolkar, H.A. Distributed data storage model for cattle health monitoring using WSN. Adv. Comput. Sci. Int. J. 2013, 2, 19–24. [Google Scholar]
- Sasloglou, K.; Glover, A.; Kwong, K.H.; Andonovic, I. Wireless sensor network for animal monitoring using both antenna and base-station diversity. In Proceedings of the IEEE ICCS 08, Guangzhou, China, 19–21 November 2008. [Google Scholar]
- Wark, T.; Corke, P.; Sikka, P.; Klingbeil, L.; Guo, Y.; Crossman, C.; Valencia, P.; Swain, D.; Bishop-Hurley, G. Transforming agriculture through pervasive wireless sensor networks. IEEE Pervasive Comput. 2007, 6, 50–57. [Google Scholar] [CrossRef]
- Zhang, P.; Sadler, C.M.; Lyon, S.A.; Martonosi, M. Hardware design experiences in ZebraNet. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 227–238. [Google Scholar]
- Handcock, R.N.; Swain, D.L.; Bishop-Hurley, G.J.; O’Neill, C.J. Monitoring animal behaviour and environmental interactions using wireless sensor networks, GPS collars and satellite remote sensing. Sensors 2009, 9, 3586–3603. [Google Scholar] [CrossRef] [PubMed]
- Mainwaring, A.; Polastre, J.; Szewczyk, R.; Culler, D.; Anderson, J. Wireless sensor networks for habitat monitoring. In Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, GA, USA, 28 September 2002; pp. 88–97. [Google Scholar]
- Wu, T.T.; Goo, S.K.; Kwong, K.H.; Michie, C.; Andonovic, I. Wireless sensor network for cattle monitoring system. GIL Jahrestagung 2009, 142, 173–176. [Google Scholar]
- Sanchez, A.J.G.; Sanchez, F.G.; Losilla, F.; Kulakowski, P.; Haro, J.G.; Rodríguez, A.; Bao, J.V.L.; Palomares, F. Wireless sensor network deployment for monitoring Wildlife Passages. Sensors 2010, 10, 7236–7262. [Google Scholar] [CrossRef] [PubMed]
- World Organisation for Animal Health (OIE). Terrestrial Animal Health Code; World Organisation for Animal Health: Paris, France, 2011. [Google Scholar]
- Matete, G.O.; Maingi, N.; Muchemi, G.; Ogara, W.; Gathuma, J.M. Design and development of an electronic identification and traceability system for cattle under pastoral production systems: A case for Kenya. Livest. Res. Rural Dev. 2010, 22, 1–17. [Google Scholar]
- Ghumare, S.S.; Labade, R.P.; Gagare, S.R. Rare Wild Animal Tracking in the Forest area with Wireless Sensor Network in Network Simulator-2. Int. J. Comput. Appl. 2016, 133. [Google Scholar] [CrossRef]
- Beng, L.T.; Kia, P.B.; Meng, L.N.; Cheng, P.N. Field testing of IoT devices for livestock monitoring using Wireless Sensor Network, near field communication and Wireless Power Transfer. In Proceedings of the IEEE Conference on Technologies for Sustainability, Airport Marriott, Phoenix, AZ, USA, 9–11 October 2016. [Google Scholar]
- Kusy, B.; Ledeczi, A.; Koutsoukos, X. Tracking mobile nodes using rf doppler shifts. In Proceedings of the 5th International Conference On Embedded Networked Sensor Systems, Sydney, Australia, 6–9 November 2007; pp. 29–42. [Google Scholar]
- Brooks, R.R.; Griffin, C.; Friedlander, D.S. Self-organized distributed sensor network entity tracking. Int. J. High Perform. Comput. Appl. 2002, 16, 207–219. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. A survey of maneuvering target tracking: Approximation techniques for nonlinear filtering. In Proceedings of the 2004 SPIE Conference on Signal and Data Processing of Small Targets, San Diego, CA, USA, 13–15 April 2004; pp. 537–550. [Google Scholar]
- Caja, G.; Ndez-Jover, M.H.; Conill, C.; Garı´n, D.; Alabern, X.; Farriol, B.; Ghirardi, J. Use of ear tags and injectable transponders for the identification and traceability of pigs from birth to the end of the slaughter line. J. Anim. Health 2005, 83, 2215–2224. [Google Scholar] [CrossRef]
- Finkenzeller, K. Rfid Handbook, 3rd ed.; John Wiley & Sons, Ltd.: Great Britain, UK, 2010. [Google Scholar]
- Hogewerf, P.H.; Ipema, A.H.; Binnendijk, G.P.; Lambooij, E.; Schuiling, H.J. Using injectable transponders for sheep identification. In Proceedings of the 7th European Conference on Precision Agriculture, Wageningen, The Netherlands, 6–8 July 2009. [Google Scholar]
- Radenkovic, M.; Wietrzyk, B. Mobile Ad Hoc Networking approach to detecting and querying events related to farm animals. In Proceedings of the IEEE International Conference on Networking and Services, Silicon Valley, CA, USA, 16–18 July 2006; pp. 109–115. [Google Scholar]
- Bishop-Hurley, G.J.; Swain, D.L.; Anderson, D.M.; Sikka, P.; Crossman, C.; Corke, P. Virtual fencing applications: Implementing and testing an automated cattle control system. Comput. Electron. Agric. 2017, 56, 14–22. [Google Scholar] [CrossRef]
- Filmer, M. Virtual fences set to transform farming. Farming Ahead 2007, 190, 70–71. [Google Scholar]
- Mayer, K.; Taylor, K.; Ellis, K. Cattle health monitoring using wireless sensor networks. In Proceedings of the 2nd IASTED International Conference on Communication and Computer Networks, Cambridge, MA, USA, 8–10 November 2004; pp. 27–33. [Google Scholar]
- CSEM Scientific and Technical Report 2009. Available online: http://www.csem.ch/docs/Show.aspx/12633/docname/CSEM-STR09-Page%2025.pdf (accessed on 24 April 2017).
- A Multi-Protocol Wireless Sensor Networks Coordinator. Available online: http://www.beanair.com/beangateway (accessed on 24 April 2017).
- Sveda, M.; Benes, P.; Vrba, R.; Zezulka, F. Handbook of Sensor Networks: Compact Wireless and Wired Sensing Systems; Taylor & Francis: Abingdon, UK, 2005; pp. 10–24. [Google Scholar]
- Bencini, L.; Palma, D.D.; Collodi, G.; Manes, A.; Manes, G. Wireless Sensor networks for on-field agricultural management process. In Wireless Sensor Networks: Application-Centric Design; Merrett, G.V., Tan, Y.K., Eds.; In Tech Open Access Publisher: Rijeka, Croatia, 2010; pp. 1–18. [Google Scholar]
- Jain, J.N.; Agrawala, A.K. Open Systems Interconnection: Its Architecture and Protocols; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Waspmote Technical Guide. Available online: http://www.libelium.com/downloads/documentation/waspmote_technical_guide.pdf (accessed on 24 April 2017).
- Manley, E.D.; Nahas, H.A.; Deogun, J.S. Localization and tracking in sensor systems. In Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Newport Beach, CA, USA, 5–7 June 2006; Volume 2, pp. 237–242. [Google Scholar]
- Niculescu, D.; Nath, B. Ad Hoc Positioning System (APS). In Proceedings of the IEEE GLOBECOM, San Antonio, TX, USA, 25–29 November 2001; Volume 5, pp. 2926–2931. [Google Scholar]
- Chen, H.; Sezaki, K.; Deng, P.; So, H.C. An improved DV-Hop localization algorithm with reduced node location error for wireless sensor networks. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2008, 91, 2232–2236. [Google Scholar] [CrossRef]
- Boukerche, A.; Horacio, A.B.F.; Nakamura, E.F.; Antonio, A.F. DV-Loc: A scalable localization protocal using voronoi diagrams for wireless sensor networks. IEEE Wirel. Commun. 2009, 16, 50–55. [Google Scholar] [CrossRef]
- Kumar, S.; Lobiyal, D.K. An advanced DV-hop localization algorithm for wireless sensor networks. Wirel. Pers. Commun. 2013, 71, 1365–1385. [Google Scholar] [CrossRef]
- Hu, Y.; Li, X.M. An improvement of DV-hop localization algorithm for wireless sensor networks. Telecommun. Syst. 2013, 53, 13–18. [Google Scholar] [CrossRef]
- Heng, F. Algorithm of wireless sensor network node based on the vehicle localization. In Proceedings of the 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), Shenzhen, China, 20–21 April 2015. [Google Scholar]
- Zhu, J.; Lv, C.; Tao, Z. An improved localization scheme based on DV-Hop for large-scale wireless sensor networks. J. Commun. 2016, 11, 1057–1065. [Google Scholar]
- Yin, M.; Shu, J.; Liu, L.; Zhang, H. The influence of beacon on DV-hop in wireless sensor networks. In Proceedings of the Fifth International Conference on Grid and Cooperative Computing Workshops, Changsha, China, 21–23 October 2006. [Google Scholar]
- Rajakumar, R.; Amudhavel, J.; Dhavachelvan, P.; Vengattaraman, T. GWO-LPWSN: Grey wolf optimization algorithm for node localization problem in wireless sensor networks. J. Comput. Netw. Commun. 2017. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Z. Integration of RFID into wireless sensor networks: Architectures opportunities and challenging problems. In Proceedings of the IEEE Fifth International Conference on Grid and Cooperative Computing Workshops, Changsha, China, 21–23 October 2006; pp. 463–469. [Google Scholar]
- Pereira, D.P.; Dias, W.R.A.; Braga, M.L.; Barreto, R.S.; Figueiredo, C.M.S.; Brilhante, V. Model to integration of RFID into wireless sensor network for tracking and monitoring animals. In Proceedings of the Eleventh IEEE International Conference on Computational Science and Engineering, Nagoya, Japan, 23–25 August 2008; pp. 125–131. [Google Scholar]
- Ou, C.H.; He, W.L. Path planning algorithm for mobile anchor-based localization in wireless sensor networks. IEEE Sens. J. 2013, 13, 466–475. [Google Scholar] [CrossRef]
- Xu, J.; Solmaz, G.; Rahmatizadeh, R.; Turgut, D.; Bölöni, L. Animal monitoring with unmanned aerial vehicle-aided wireless sensor networks. In Proceedings of the 40th IEEE Conference on Local Computer Networks (LCN), Clearwater Beach, FL, USA, 26–29 October 2015; pp. 334–341. [Google Scholar]
- Kang, J.; Larkin, H. Application of an emergency alarm system for physiological sensors utilizing smart devices. Technologies 2017, 5, 26. [Google Scholar] [CrossRef]
- Bett, B.; Mutua, F.; Kihara, A.; Rogena, J.; Ngwili, N.; Muunda, E.; Wabacha, J. Piloting Livestock Identification and Traceability Systems in Pastoral Production Systems in Eastern Africa; Preliminary Report; ILRI: Nairobi, Kenya, 2015. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Default Values |
|---|---|
| Network Area | 1000 × 1000 m |
| Simulation Time | 180 s |
| Mobile target velocity (λ) | 1~10 m/60 s |
| Range Nodes Propagation Range | R = 300 m |
| Number of Nodes | 200 (10% of 2000 animals) |
| Placement of Nodes | Random |
| Number of Gateways | 11 (Vary gateways between 5 and 15) |
| Placement of Gateways | Deterministic (but random in this case) |
| Mobility Model Used | Random Walk Mobility Model |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wamuyu, P.K. A Conceptual Framework for Implementing a WSN Based Cattle Recovery System in Case of Cattle Rustling in Kenya. Technologies 2017, 5, 54. https://doi.org/10.3390/technologies5030054
Wamuyu PK. A Conceptual Framework for Implementing a WSN Based Cattle Recovery System in Case of Cattle Rustling in Kenya. Technologies. 2017; 5(3):54. https://doi.org/10.3390/technologies5030054
Chicago/Turabian StyleWamuyu, Patrick Kanyi. 2017. "A Conceptual Framework for Implementing a WSN Based Cattle Recovery System in Case of Cattle Rustling in Kenya" Technologies 5, no. 3: 54. https://doi.org/10.3390/technologies5030054
APA StyleWamuyu, P. K. (2017). A Conceptual Framework for Implementing a WSN Based Cattle Recovery System in Case of Cattle Rustling in Kenya. Technologies, 5(3), 54. https://doi.org/10.3390/technologies5030054